
A Trajectory Generation Algorithm for a Re-Entry Gliding Vehicle Based on Convex Optimization in the Flight Range Domain and Distributed Grid Points Adjustment

Abstract
:Featured Application
Abstract
1. Introduction
- According to the concept of range-to-go in the guidance of re-entry glide vehicles, the projected range-to-go is proposed. By the definition of projected range-to-go, the dynamic model of the vehicle is transformed from the time domain to the flight range domain. Then the dynamic model and constraints are convexification and discretization, and the final sequential convex optimization expression is proposed;
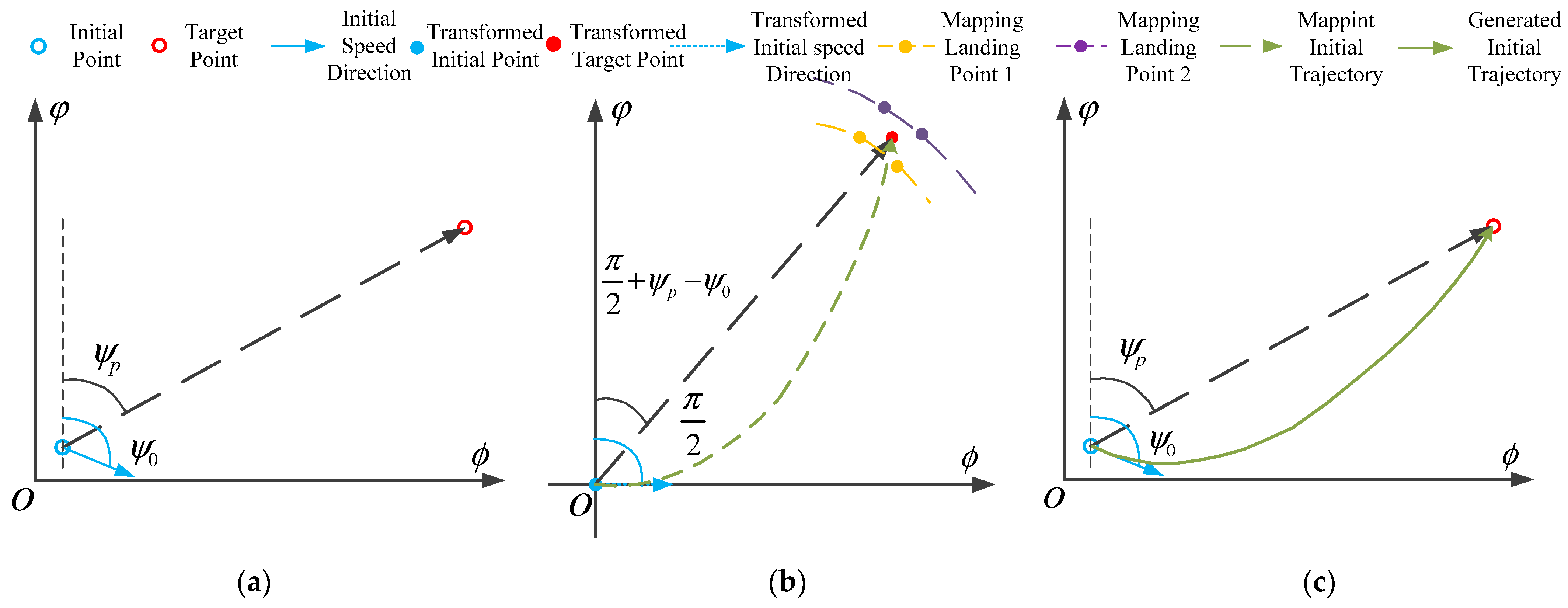
- According to the landing points under the different constant control laws, the initial trajectory generation problem of the vehicle in any spatial state is transformed into a similar initial state trajectory generation problem by rotation transformation. And the initial trajectory that can basically realize practical guidance and meet the dynamic model is obtained by interpolation;
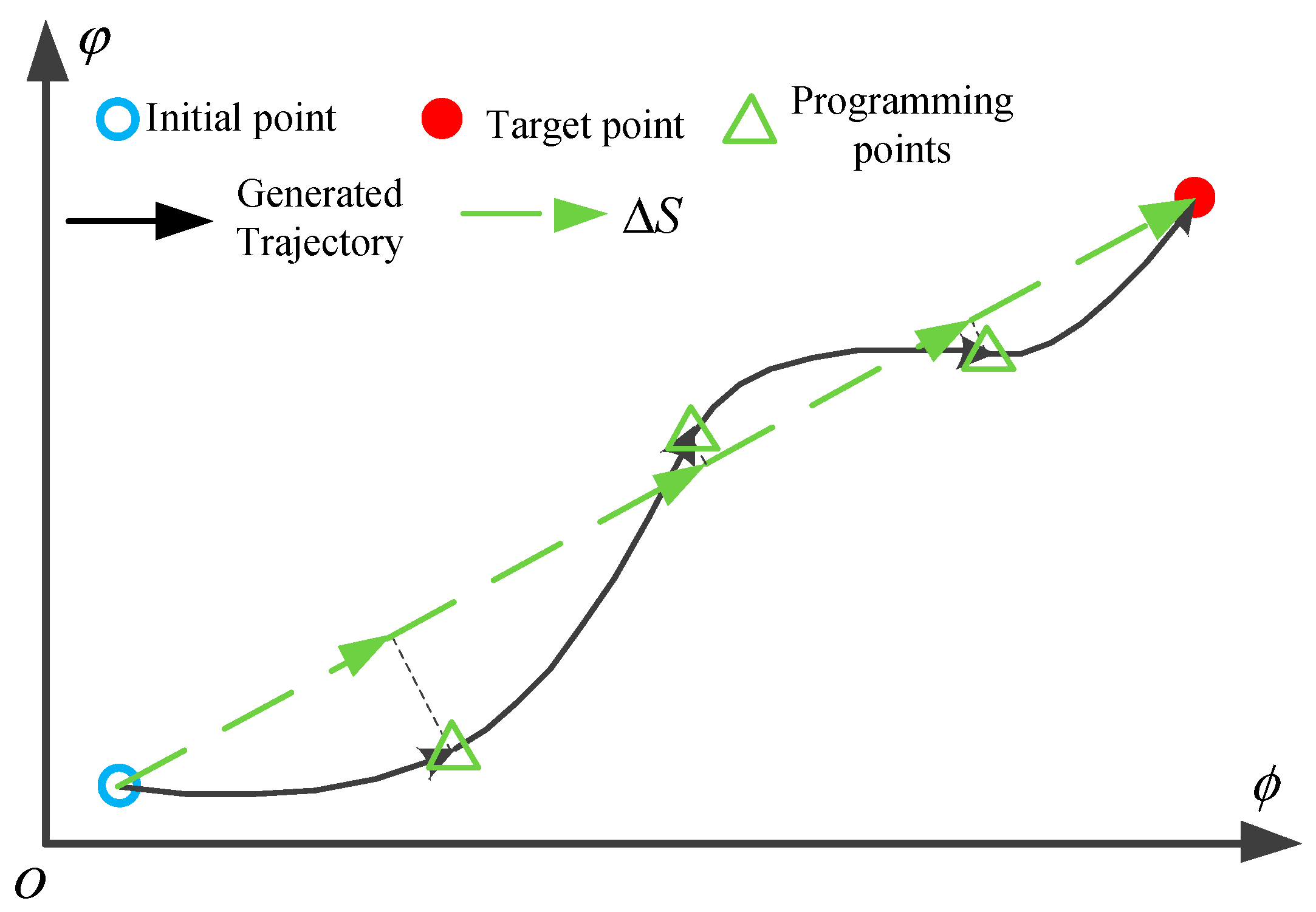
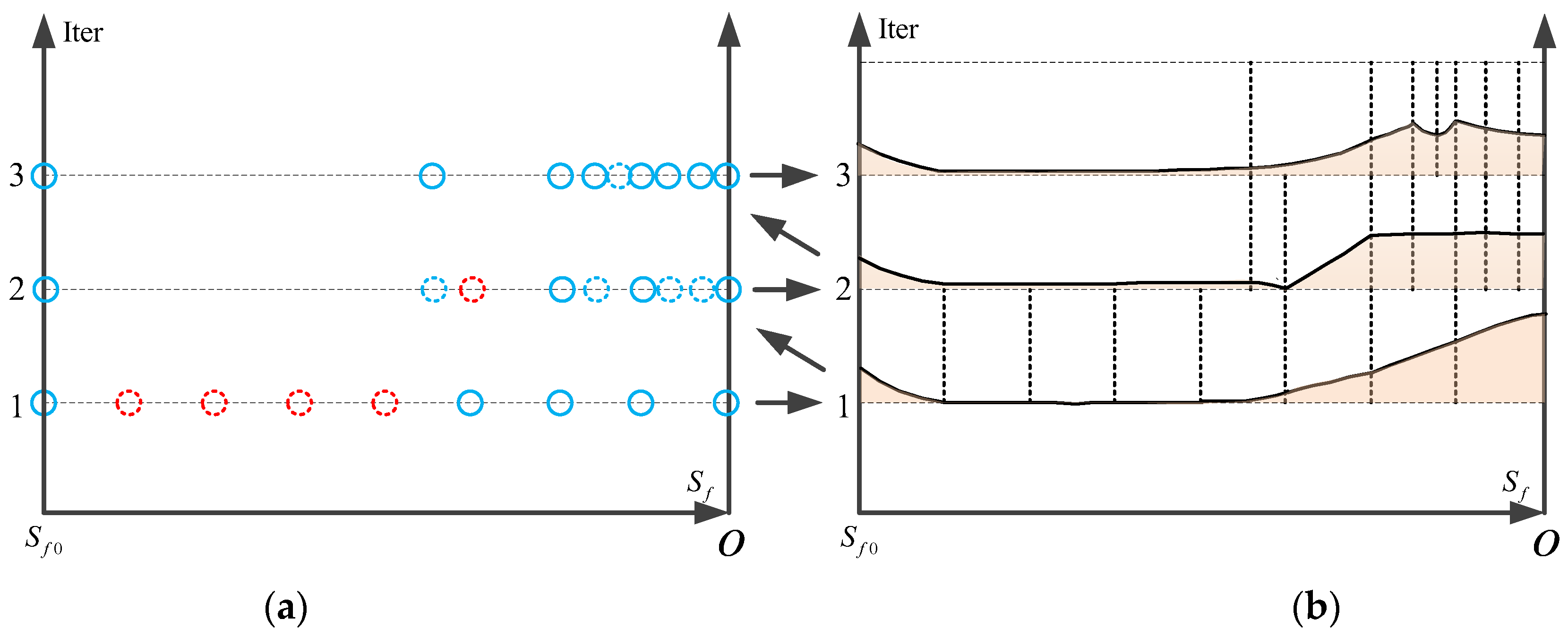
- According to the concept of the nonlinear illegal degree of iteration trajectory and the distribution of the nonlinear illegal degree, the grid points probability density function is proposed, and the grid points adjustment law is proposed by the probability density function, which realizes efficient and fast grid points adjustment.
2. Dynamic Models and Constraints of Re-Entry Glide Vehicle
2.1. Dimensionless Dynamic Model in the Flight Range Domain
2.2. Constraints Settings
2.3. Description of Re-Entry Generation Problem in the Flight Range Domain
3. Convexification and Discretization of the Re-Entry Trajectory Generation Problem
3.1. State, Control Variable Settings and Model Convexity
3.2. Constraint Convexity and Relaxation
- (1)
- Constraints of state variables
- (2)
- Convexification of process constraint
- (3)
- Convexification of the no-fly zones constraint
3.3. Improved Description of Convex Optimization Problem
3.4. Discretization of Dynamic Model
3.5. Termination Condition of Solving
4. Fast Initial Trajectory Setting and Distributed Grid Points Adjustment
4.1. Fast Initial Trajectory Setting
4.2. Distributed Grid Points Adjustment
5. Simulation
5.1. Experimental Subjects and Parameter Settings
5.2. Verification of the Initial Trajectory Generation
5.3. Validity Verification
5.4. Simulation Experiment with Different Target Points
5.5. Simulation Experiment with Initial State Disturbance
5.6. Monte Carlo Robustness Simulation
5.7. Comparison of Mainstream Methods
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Magnitude | Meaning | Units |
| Dimensionless geocentric distance of RGV | ||
| , | Longitude and Latitude of RGV | rad |
| Dimensionless velocity of RGV | ||
| Radius of earth | m | |
| Flight path angle of RGV | rad | |
| Flight heading angle of RGV | rad | |
| Dimensionless lift and drag force of HGV | ||
| Atmospheric density constant | kg/m3 | |
| Atmosphere density constant | kg/m3 | |
| Atmospheric altitude constant | m | |
| , | Lift coefficient and Drag coefficient | |
| Dimensional velocity | m/s | |
| Gravity acceleration at zero altitude | m/s2 | |
| Flight heading angle of the target point relative to the initial point | rad | |
| Projected range-to-go | rad | |
| Dimensionless terminal altitude | ||
| Dimensionless terminal velocity | ||
| Terminal longitude and latitude | ||
| Hear flux | W/m2 | |
| Dynamic pressure | Pa | |
| Overload | ||
| Attack angle | rad | |
| Bank angle | rad | |
| Objective function | ||
| Variable of trust region | ||
| Probability density function of grid points |
References
- Xie, Y.; Liu, L.; Tang, G.; Zheng, W. A reentry trajectory planning approach satisfying waypoint and no-fly zone constraints. In Proceedings of the 5th IEEE International Conference on Recent Advances in Space Technologies-RAST2011, Istanbul, Turkey, 9–11 June 2011; pp. 241–246. [Google Scholar]
- Luo, C.; Lei, H.; Li, J.; Zhou, C. A new adaptive neural control scheme for hypersonic vehicle with actuators multiple constraints. Nonlinear Dyn. 2020, 100, 3529–3553. [Google Scholar] [CrossRef]
- Xue, S.; Ping, L. Constrained Predictor–Corrector Entry Guidance. J. Guid. Control Dyn. 2010, 33, 1273–1281. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, K.; Fan, Y.; She, Z. A Piecewise Predictor-corrector Re-entry Guidance Algorithm with No-fly Zone Avoidance. J. Astronaut. 2021, 42, 122–131. [Google Scholar]
- Li, M.; Zhou, C.; Shao, L.; Lei, H.; Luo, C. An Improved Predictor-Corrector Guidance Algorithm for Reentry Glide Vehicle Based on Intelligent Flight Range Prediction and Adaptive Crossrange Corridor. Int. J. Aerosp. Eng. 2022, 2022, 7313586. [Google Scholar] [CrossRef]
- Yong, E.M.; Qian, W.Q.; He, K.F. An adaptive predictor–corrector reentry guidance based on self-definition way-points. Aerosp. Sci. Technol. 2014, 39, 211–221. [Google Scholar] [CrossRef]
- Zang, L.; Lin, D.; Chen, S.; Wang, H.; Ji, Y. An on-line guidance algorithm for high L/D hypersonic reentry vehicles. Aerosp. Sci. Technol. 2019, 89, 150–162. [Google Scholar] [CrossRef]
- Zhu, J.; Liu, L.; Tang, G.; Bao, W. Highly constrained optimal gliding guidance. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2015, 229, 2321–2335. [Google Scholar] [CrossRef]
- Liu, X.; Lu, P.; Pan, B. Survey of convex optimization for aerospace applications. Astrodynamics 2017, 1, 23–40. [Google Scholar] [CrossRef]
- Liu, X.; Shen, Z.; Lu, P. Entry trajectory optimization by second-order cone programming. J. Guid. Control Dyn. 2016, 39, 227–241. [Google Scholar] [CrossRef]
- Wang, Z.; Grant, M.J. Constrained trajectory optimization for planetary entry via sequential convex programming. J. Guid. Control Dyn. 2017, 40, 2603–2615. [Google Scholar] [CrossRef]
- Wang, Z.; Grant, M.J. Autonomous entry guidance for hypersonic vehicles by convex optimization. J. Spacecr. Rocket. 2018, 55, 993–1006. [Google Scholar] [CrossRef]
- Hong, H.; Maity, A.; Holzapfel, F.; Tang, S. Model predictive convex programming for constrained vehicle guidance. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2487–2500. [Google Scholar] [CrossRef]
- Liu, X.; Shen, Z.; Lu, P. Exact convex relaxation for optimal flight of aerodynamically controlled missiles. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1881–1892. [Google Scholar] [CrossRef]
- Liu, X. Fuel-optimal rocket landing with aerodynamic controls. J. Guid. Control Dyn. 2019, 42, 65–77. [Google Scholar] [CrossRef]
- Wang, J.; Cui, N.; Wei, C. Rapid trajectory optimization for hypersonic entry using convex optimization and pseudospectral method. Aircr. Eng. Aerosp. Technol. 2019, 91, 669–679. [Google Scholar] [CrossRef]
- Sandberg, A.; Sands, T. Autonomous trajectory generation algorithms for spacecraft slew maneuvers. Aerospace 2022, 9, 135. [Google Scholar] [CrossRef]
- Raigoza, K.; Sands, T. Autonomous trajectory generation comparison for de-orbiting with multiple collision avoidance. Sensors 2022, 22, 7066. [Google Scholar] [CrossRef]
- Wang, Z.; Lu, Y. Improved sequential convex programming algorithms for entry trajectory optimization. J. Spacecr. Rocket. 2020, 57, 1373–1386. [Google Scholar] [CrossRef]
- Zhou, X.; Zhang, H.B.; Xie, L.; Tang, G.J.; Bao, W.M. An improved solution method via the pole-transformation process for the maximum-crossrange problem. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020, 234, 1491–1506. [Google Scholar] [CrossRef]
- Zhou, X.; Zhang, H.B.; He, R.Z.; Tang, G.J.; Bao, W.M. Entrytrajectory planning method based on 3D profile via convex optimization. Acta Aeronaut. Astronaut. Sin. 2020, 41, 66–82. [Google Scholar]
- Sagliano, M.; Mooij, E. Optimal drag-energy entry guidance via pseudospectral convex optimization. Aerosp. Sci. Technol. 2021, 117, 106946. [Google Scholar] [CrossRef]
- Mehrpouya, M.A.; Peng, H. A robust pseudospectral method for numerical solution of nonlinear optimal control problems. Int. J. Comput. Math. 2021, 98, 1146–1165. [Google Scholar] [CrossRef]
- Darby, C.L.; Hager, W.W.; Rao, A.V. Direct trajectory optimization using a variable low-order adaptive pseudospectral method. J. Spacecr. Rocket. 2011, 48, 433–445. [Google Scholar] [CrossRef]
- Li, N.; Lei, H.; Shao, L. Trajectory optimization based on multi-interval mesh refinement method. Math. Probl. Eng. 2017, 2017, 8521368. [Google Scholar] [CrossRef]
- Zhao, J.S.; Li, S. Mars atmospheric entry trajectory optimization with maximum parachute deployment altitude using adaptive mesh refinement. Acta Astronaut. 2019, 160, 401–413. [Google Scholar] [CrossRef]
- Zhou, X.; He, R.Z.; Zhang, H.B.; Tang, G.J.; Bao, W.M. Sequential convex programming method using adaptive mesh refinement for entry trajectory planning problem. Aerosp. Sci. Technol. 2021, 109, 106374. [Google Scholar] [CrossRef]
- Zhang, J.; Li, J.; Zhou, C.; Lei, H.; Li, W. Fast Trajectory Generation Method for Midcourse Guidance Based on Convex Optimization. Int. J. Aerosp. Eng. 2022, 2022, 7188718. [Google Scholar] [CrossRef]
- Phillips, T.H. A Common Aero Vehicle (CAV) Model, Description, and Employment Guide; Schafer Corporation: New York, NY, USA, 2003. [Google Scholar]
- Yu, J.; Dong, X.; Li, Q.; Ren, Z.; Lv, J. Cooperative guidance strategy for multiple hypersonic gliding vehicles system. Chin. J. Aeronaut. 2020, 33, 990–1005. [Google Scholar] [CrossRef]
- Yu, J.; Dong, X.; Li, Q.; Lü, J.; Ren, Z. Adaptive Practical Optimal Time-Varying Formation Tracking Control for Disturbed High-Order Multi-Agent Systems. IEEE Trans. Circuits Syst. I Regul. Pap. 2022, 69, 2567–2578. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Waste Time (s) | Iteration | ||
|---|---|---|---|---|
| 1 | 0.001 | −6.43 × 10−4 | 22.93 | 5 |
| 2 | 0.041 | 0.005 | 27.20 | 5 |
| 3 | 0.016 | −0.001 | 110.67 | 19 |
| Case | Waste Time (s) | Iteration | ||||
|---|---|---|---|---|---|---|
| 1 | 28 | 23 | 0.167 | 0.009 | 135.84 | 23 |
| 2 | 30 | 20 | 0.082 | −0.002 | 38.63 | 7 |
| 3 | 30 | 10 | 0.079 | −0.009 | 34.87 | 6 |
| 4 | 27 | 27 | 0.139 | −0.019 | 122.70 | 21 |
| Case | Waste Time (s) | Iteration | ||
|---|---|---|---|---|
| 0.002 | −0.001 | 24.92 | 5 | |
| 0.005 | −9 × 10−4 | 19.63 | 4 | |
| 0.002 | −0.002 | 25.08 | 5 | |
| 0.004 | −6 × 10−4 | 45.54 | 9 |
| Method | Waste Time (s) | Iteration | Number of Grid Points | ||
|---|---|---|---|---|---|
| Our method | 0.016 | 0.001 | 110.67 | 21 | 200 |
| Gaussian Spectral method | 0.010 | 1 × 10−4 | 154.20 | 25 | 341 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Zhou, C.; Shao, L.; Lei, H.; Luo, C. A Trajectory Generation Algorithm for a Re-Entry Gliding Vehicle Based on Convex Optimization in the Flight Range Domain and Distributed Grid Points Adjustment. Appl. Sci. 2023, 13, 1988. https://doi.org/10.3390/app13031988
Li M, Zhou C, Shao L, Lei H, Luo C. A Trajectory Generation Algorithm for a Re-Entry Gliding Vehicle Based on Convex Optimization in the Flight Range Domain and Distributed Grid Points Adjustment. Applied Sciences. 2023; 13(3):1988. https://doi.org/10.3390/app13031988
Chicago/Turabian StyleLi, Mingjie, Chijun Zhou, Lei Shao, Humin Lei, and Changxin Luo. 2023. "A Trajectory Generation Algorithm for a Re-Entry Gliding Vehicle Based on Convex Optimization in the Flight Range Domain and Distributed Grid Points Adjustment" Applied Sciences 13, no. 3: 1988. https://doi.org/10.3390/app13031988