
IoT-Based Cotton Plant Pest Detection and Smart-Response System

 ,
,  , ,
, ,
Abstract
:1. Introduction
2. Related Work
2.1. Technologies Used in Agriculture
2.2. IoT in Agriculture
3. IoT-Based Smart Detection and Response System Architecture
3.1. Core Functionality of System
3.2. IoT-Based Cotton Pest Detection
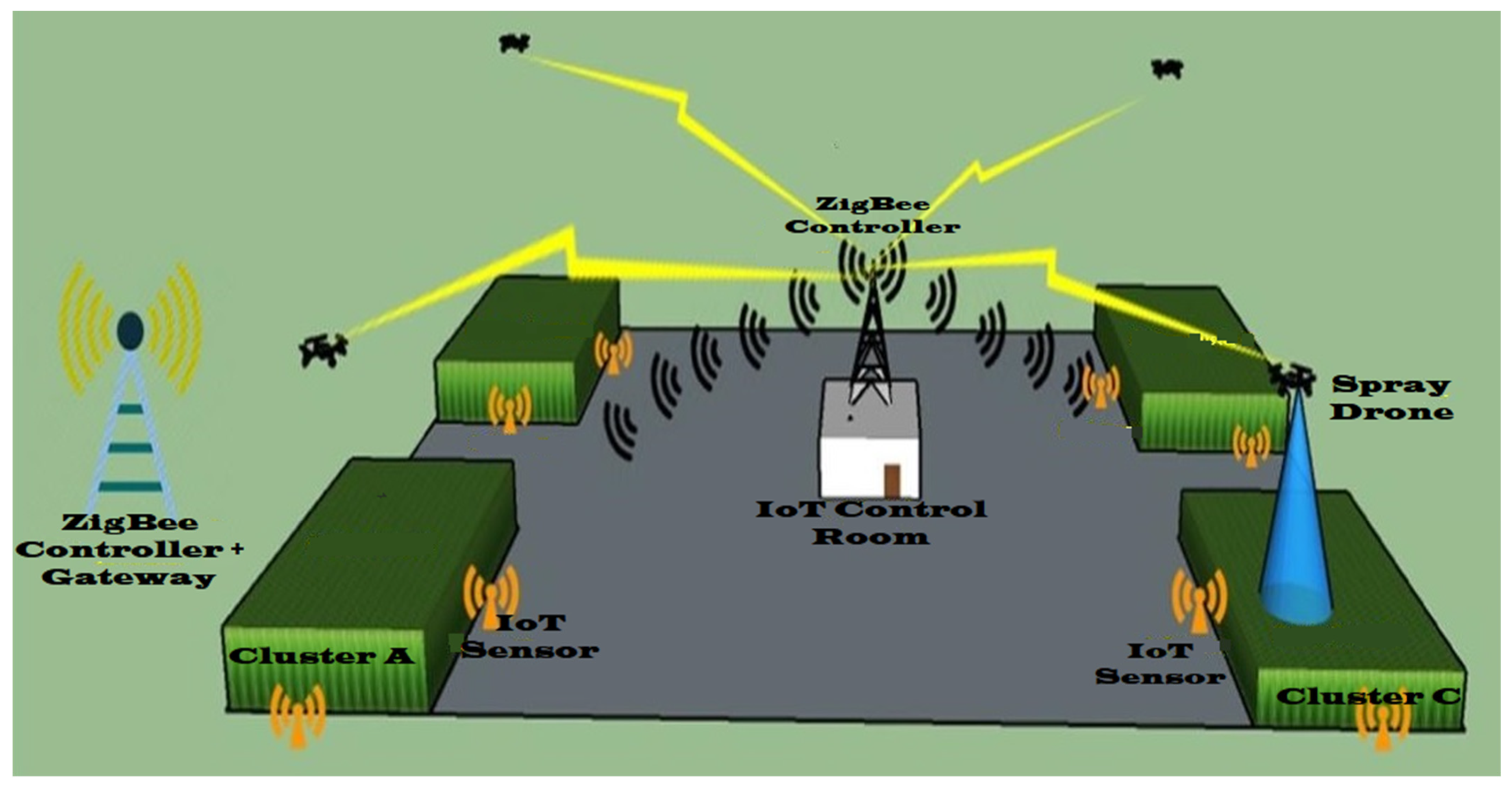
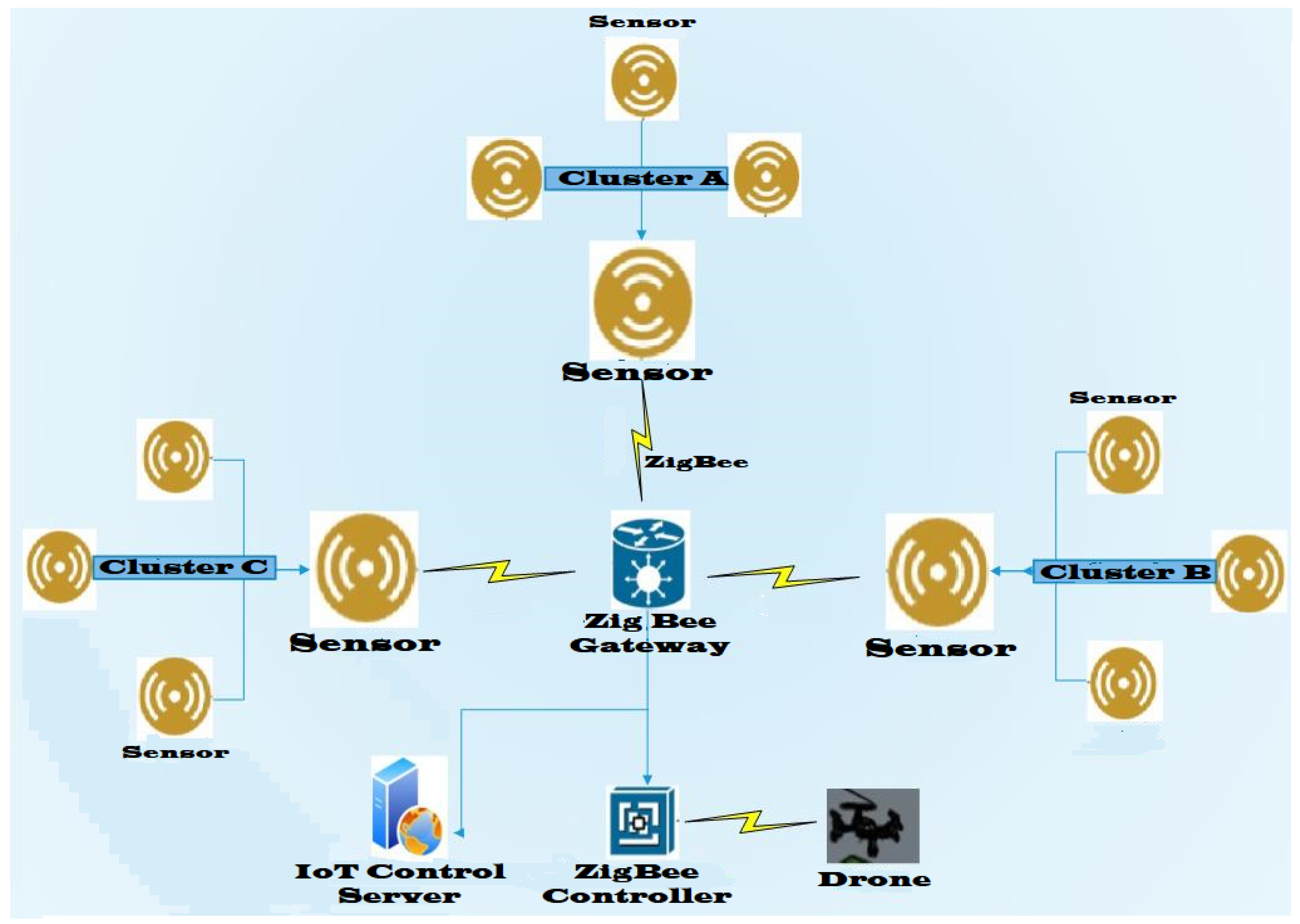
- The Gateway Tier: The function of this layer is to collect the data sent by the sensors and respond accordingly. When sensors send messages about the presence of insects, it decides where to send the drones. For example, if a message is received once from a sensor and repeated messages are received from a sensor. It will send the drone to the side where the messages were coming from again and again. Because we are using ZigBee and we have not yet extended the range of our architecture, the whole system can be controlled from one or two central ZigBee Gateways, but if we use LoRa Gateway, it will be more manageable, and we will have to adopt it because it has a longer range and more data carrying capacity than ZigBee.
- The Control Tier: This tier will respond to the detection data packet from the sensors.
- I
- First, in which cluster did more insects move in and what could be the cause?
- II
- Second, the crop quality of this cluster may be different from other clusters.
- III
- Third, more spray is required in clusters with a high number of insect detections.
- IV
- Analysis of the overall testing results would help us optimize the detection and response system in future testing.
- Response Tier: This is a response layer, which is very useful and is the retaliation point of our entire system. This layer includes our ZigBee Controller (ZC) modules, drones, and the coordinates of the sensors from which we receive signals will be provided to the drones so that the drones perform targeted spray on the insects. If the insect had gone somewhere else by the time drone arrived, then we could increase the target region by including its neighborhood areas. In Figure 5, we have shown the whole framework, and apparently, four different drones are visible, but these will be only one or two drones, and they will continue to spray on the signals of different sensors on their specific routes.
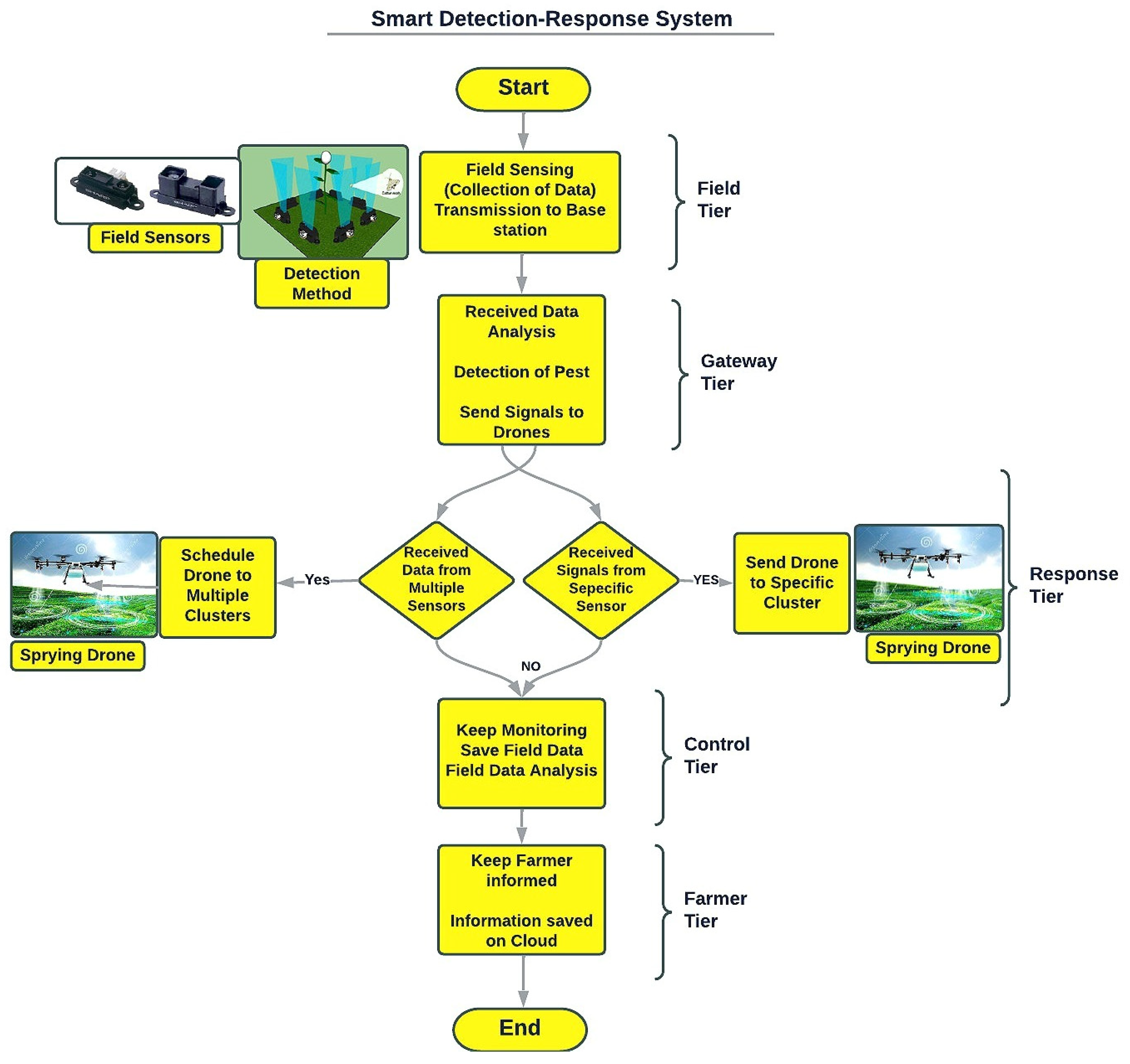
- Farmer Tier: We propose a web interface for the farmer to view daily activities, including daily reports showing how many sensors sent detection packets and how many times drones sprayed on the crop. Figure 6 shows the full flow of the system, how the system receives signals and how it responds to them.
3.3. Smart Response Mechanism
3.4. Algorithm Operations and Analysis
4. Simulations
4.1. Simulation Setup
4.2. Assumption and Operation
- Each cluster has sensors connected to the nearest base station via the LoRa Communication module.
- The whole proposed system will currently have one drone/UAV that is connected to the base station, and as soon as a message from a sensor arrives, it goes there and sprays according to the coordinates given by the base. (However, we have proposed multiple drone operations in our predictive Algorithm. An advanced camera-equipped drone has also been proposed, which will be part of our system in the future.)
- In our simulation, some clusters and base stations are connected by a single hop, while some are connected by double or multiple hops.
- In this simulation, in some clusters, we operated the drones on the base’s signals, while in some places, we tried to operate the drones manually.
- Everything in the simulation is pre-determined; for example, how long will the simulation last? How long will it take for the drone to reach the sensor (if it is reached automatically by the sensor’s messages), how long will it take for us to arrive there (if we operate UAV manually), or how long will it take for the worm to circulate in the entire field?
- Drones that arrive on a single hop will certainly spend less time to reach, but drones that access a sensor or worm on a double hop will have a longer time. (The same thing will happen in the real scene drone that arrives from a distance will have a longer arrival time, while a nearby drone will quickly reach its target.
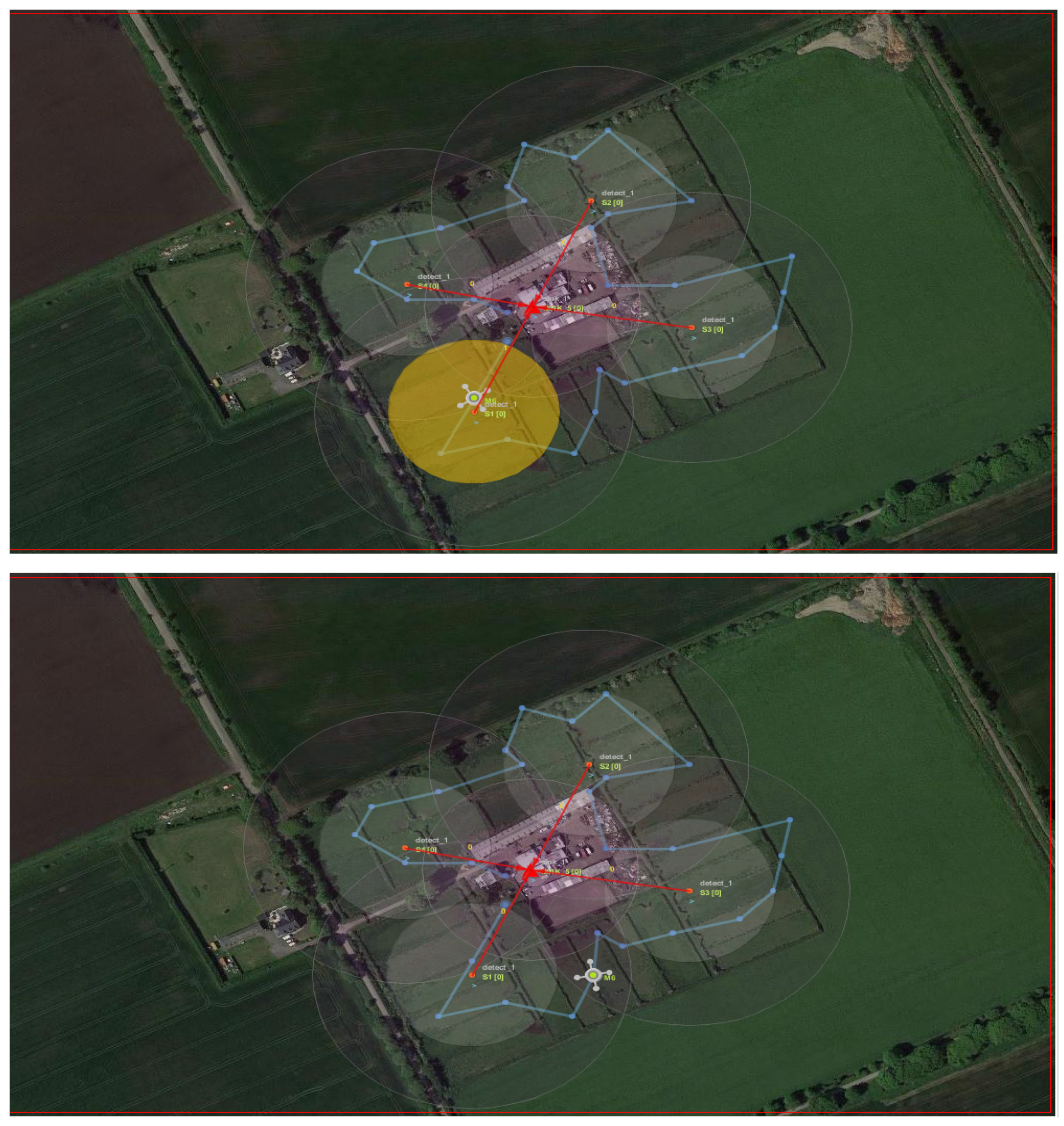
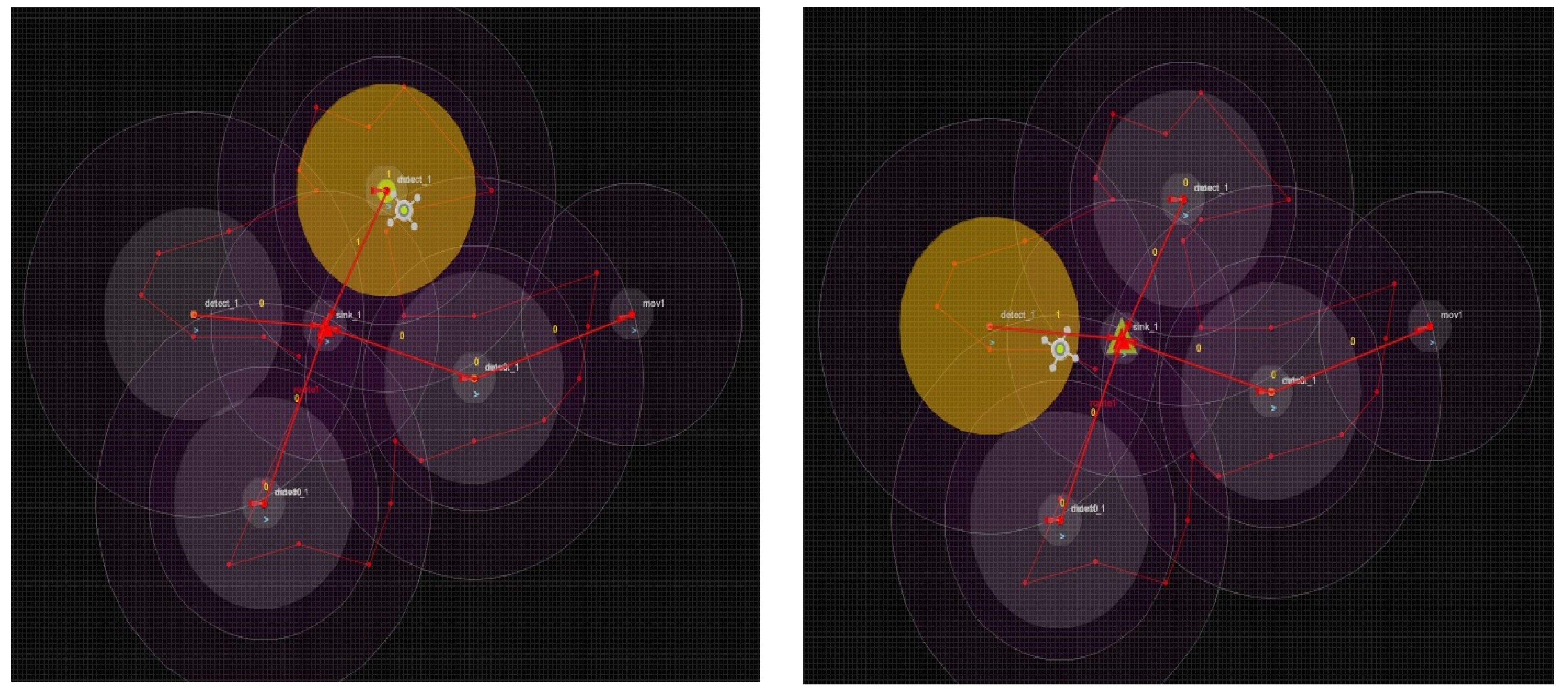
- According to the design topology, following the sensor signals, the drone will move into specific clusters and spray on insects or infected plants. Figure 9 and Figure 10 show drones and worms hovering in different clusters of the field, and when the worm enters a cluster, the simulator points it out, as seen in Figure 10.
- The simulator has limitations, so now we can only deliver drones to clusters from which the message of insect identification has come. We are not yet able to chase insects or send drones to a specific place where the worm is flying at the moment.
- We have also created a specific path for the flying moth in the simulation through which the moth/insect passes, and the clusters it passes through generate signals of its presence, and accordingly, the drone follows it. The simulator identifies the worms and the presence of the drone, and when the worm enters, a cluster simulator highlights this particular cluster so that both the moth and the drone operation can be seen.
- After the spray operation, the drones return to their designated hangars and then wait for the next signals.
- If the field is large, then more drones will have to be used, but if the field is small, then only a small number of sensors and drones can work. Nowadays, there are a lot of companies making spray drones, so their price has also come down a lot.
- Our drones do not yet have cameras, but in the future, if we equip our spray drones with cameras, we will be able to see the insects and chase them and destroy them on the spot.
- One of the problems with our system may be that the signals are from an insect that is not harmful, and we have to eliminate it with our drones or spurs. This problem can also be solved when we put cameras on our drones and see if it is a harmful worm or not.
- But if the Moth/Worm is not found there, how will the drone chase it or return after spraying the plants? This is a question to which we are looking for an answer.
4.3. Signal Patterning during Insect Detection
4.4. Statistics Analysis
5. Conclusions and Future Work
- Availability of required IoT sensors to identify different cotton pests. (Although some sensors are available in the market as we have used a sensor in our work. However, there is still room for more smart sensors to be designed with better results).
- Getting real insect detection signals through IoT sensors and further refining them so that no other technology is needed is also a challenge. This is the challenge of the sensor design market.
- Making all these sensors and drones on a commercial basis is no longer considered a challenge. So that their prices can be reduced and farmers can implement such technology in their fields
- Just as we have worked on identifying pests of one crop field, expanding one system or framework and using it to identify other pests is also a challenge, and we are working on it further.
- Because IoT sensors are too small, meeting their energy needs is also a challenge so that they can last a whole season without any extra charge or battery, and they also need to be protected from large animals and protected from theft.
- One of our tasks in the future is to expand the framework for pest detection of other crops as well, and the framework that we have just developed for cotton pests is based on pests of other crops. It can also be applied in the same way as it has been applied to cotton bollworms.
- The usefulness of this framework can also be enhanced by creating a web interface and linking to the cloud.
- From this framework, we are currently only detecting pests, but if we also use weather and environment monitoring sensors in our framework to detect the arrival of pests due to climate change, then our framework can be more effective.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
| Algorithm A1: Detection algorithm. |
|
Appendix B
| Algorithm A2: Proposed drone movement predictive algorithm. |
|
References
- Better Cotton in Pakistan. Available online: https://bettercotton.org/where-is-better-cotton-grown/pakistan/ (accessed on 17 August 2021).
- United Nations General Assembly. Food Production Must Double by 2050 to Meet Demand from Worlds Growing Population, Innovative Strategies Needed to Combat Hunger, Experts Tell Second Committee. Available online: http://www.un.org/press/en/2009/gaef3242.doc.htm (accessed on 3 October 2021).
- Randive, P.U.; Deshmukh, R.R.; Janse, P.V.; Gupta, R.S. Discrimination Between Healthy and Diseased Cotton Plant by Using Hyperspectral Reflectance Data. In Recent Trends in Image Processing and Pattern Recognition (RTIP2R); Springer: Berlin/Heidelberg, Germany, 2019; pp. 342–351. [Google Scholar]
- Web Encyclopedia. Available online: http://encyclopedia.uia.org/en/problem/135349updated30-09-2019 (accessed on 21 August 2021).
- Dubey, Y.; Mushrif, M.; Tiple, S. Superpixel Based Roughness Measure for Cotton Leaf Diseases Detection and Classification. In Proceedings of the 4th International Conference Recent Advances in Information Technology (RAIT), Dhanbad, India, 15–17 March 2018; pp. 1–5. [Google Scholar]
- Li, D.; Zhao, C. Computer and Computing Technologies in Agriculture XI, Proceedings of the 11th IFIP WG 5.14 International Conference, CCTA 2017, Jilin, China, 12–15 August 2017; Proceedings, Part II; AICT-546, IFIP Advances in Information and Communication Technology; Springer International Publishing: Berlin/Heidelberg, Germany, 2019. [Google Scholar] [CrossRef]
- Lin, J.; Yu, W.; Zhang, N.; Yang, X.; Zhang, H.; Zhao, W. A Survey on Internet of Things: Architecture, Enabling Technologies, Security and Privacy, and Applications. IEEE Internet Things J. 2017, 4, 1125–1142. [Google Scholar] [CrossRef]
- Sisinni, E.; Saifullah, A.; Han, S.; Jennehag, U.; Gidlund, M. Industrial Internet of Things: Challenges, Opportunities, and Directions. IEEE Trans. Ind. Inform. 2018, 14, 4724–4734. [Google Scholar] [CrossRef]
- Ayaz, M.; Ammad-uddin, M.; Baig, I.; Aggoune, E.M. Wireless Sensor ‘s Civil Applications, Prototypes, and Future Integration Possibilities: A Review. IEEE Sens. J. 2018, 18, 4–30. [Google Scholar] [CrossRef]
- Elijah, O.; Rahman, T.A.; Orikumhi, I.; Leow, C.Y.; Hindia, M.N. An Overview of Internet of Things (IoT) and Data Analytics in Agriculture: Benefits and Challenges. IEEE Internet Things J. 2018, 5, 3758–3773. [Google Scholar] [CrossRef]
- Shi, X.; An, X.; Zhao, Q.; Liu, H.; Xia, L.; Sun, X.; Guo, Y. State-of-the-Art Internet of Things in Protected Agriculture. Sensors 2019, 19, 1833. [Google Scholar] [CrossRef] [Green Version]
- Titiya, M.D.; Shah, V.A. Ontology based expert system for pests and disease management of cotton crop in India. IJWP 2018, 10, 32–49. [Google Scholar] [CrossRef]
- Xiao, Q.; Li, W.; Chen, P.; Wang, B. Prediction of Crop Pests and Diseases in Cotton by Long Short Term Memory Network. In Intelligent Computing Theories and Application (ICIC); Springer: Berlin/Heidelberg, Germany, 2018; Volume 2, pp. 11–16. [Google Scholar]
- Li, H.; Ji, R.; Zhang, J.; Xue, Y.; Hu, K.; Qi, L. WEB-Based Intelligent Diagnosis System for Cotton Diseases Control. In Computer and Computing Technologies in Agriculture; Springer: Berlin/Heidelberg, Germany, 2010; Volume 3, pp. 483–490. [Google Scholar]
- Gao, D.; Sun, Q.; Hu, B.; Zhang, S. A Framework for Agricultural Pest and Disease Monitoring Based on Internet-of-Things and Unmanned Aerial Vehicles. Sensors 2020, 20, 1487. [Google Scholar] [CrossRef] [Green Version]
- Vanegas, F.; Bratanov, D.; Powell, K.; Weiss, J.; Gonzalez, F. A Novel Methodology for Improving Plant Pest Surveillance in Vineyards and Crops Using UAV-Based Hyperspectral and Spatial Data. Sensors 2018, 18, 260. [Google Scholar] [CrossRef] [Green Version]
- Dong, Y.; Fu, Z.; Stankovski, S.; Peng, Y.; Li, X. A Cotton Disease Diagnosis Method Using a Combined Algorithm of Case-Based Reasoning and Fuzzy Logic. Comput. J. 2021, 64, 155–168. [Google Scholar] [CrossRef]
- Koubaa, A.; Aldawood, A.; Saeed, B.; Hadid, A.; Ahmed, M.; Saad, A.; Alkanhal, M. Smart Palm: An IoT framework for red palm weevil early detection. Agronomy 2020, 10, 987. [Google Scholar] [CrossRef]
- Apeksha, T.; Sangeeta, K.; Nandakishor, D.V. An IoT based Smart solution for Leaf Disease Detection. In Proceedings of the International Conference on Big Data, IoT and Data Sciences (BID), Pune, India, 20–22 December 2017. [Google Scholar]
- Materne, N.; Inoue, M. IoT Monitoring system for early detection of agricultural pests and diseases. In Proceedings of the 2018 12th South East Asian Technical University Consortium (SEATUC), Yogyakarta, Indonesia, 12–13 March 2018; Volume 1, pp. 1–5. [Google Scholar]
- Sharma, R.P.; Ramesh, D.; Edla, D.R. IoFT-FIS: Internet of farm things based prediction for crop pest infestation using optimized fuzzy inference system. Internet Things 2022, 21, 100658. [Google Scholar] [CrossRef]
- Piromalis, D.; Arvanitis, K. Sensotube: A scalable hardware design architecture for wireless sensors and actuators networks nodes in the agricultural domain. Sensors 2016, 16, 1227. [Google Scholar] [CrossRef] [Green Version]
- Jose, P.; Gemma, H.; Coen, D.A.; Oscar, C. Design of a low-cost Wireless Sensor Network with UAV mobile node for agricultural applications. Comput. Electron. Agric. 2015, 119, 19–32. [Google Scholar] [CrossRef]
- Bai, J.; Xu, G.; Zhou, T.; Zhao, Z. Study on temporal distribution and trend prediction of rice plant diseases and insect pests in Chongqing Municipality. J. Nat. Disasters 2016, 21, 3–4. [Google Scholar]
- Pooja, V.; Kuldeep, K.Y. Recognition and Early Stage Detection of Phytophthora in a Crop Farm Using IoT. In Agro-Economic Risks of Phytophthora and an Effective Biocontrol Approach; IntechOpen: London, UK, 2021. [Google Scholar] [CrossRef]
- Ayaz, M.; Ammad-Uddin, M.; Sharif, Z.; Mansour, A.; Aggoune, E.H.M. Internet-of-Things (IoT)-based smart agriculture: Toward making the fields talk. IEEE Access 2019, 7, 129551–129583. [Google Scholar] [CrossRef]
- Christiansen, M.P.; Laursen, M.S.; Jargensen, R.N.; Skovsen, S.; Gislum, R. Designing and Testing a UAV Mapping System for Agricultural Field Surveying. Sensors 2017, 17, 2703. [Google Scholar] [CrossRef] [Green Version]
- Vazquez-Arellano, M.; Griepentrog, H.W.; Reiser, D.; Paraforos, D.S. 3-D Imaging Systems for Agricultural Applications-A Review. Sensors 2016, 16, 618. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhuhua, H.; Yaochi, Z. Construction and application of intelligent video monitoring system for agricultural diseases and insect pests. J. Chin. Agric. Mechan. 2016, 31, 42–43. [Google Scholar]
- Hang, S.; Gao, D.; Lin, H.; Sun, Q. Wildfire Detection Using Sound Spectrum Analysis Based on the Internet of Things. Sensors 2019, 19, 5093. [Google Scholar] [CrossRef] [Green Version]
- Kocakulak, M.; Butun, I. An overview of Wireless Sensor Networks towards internet of things. In Proceedings of the IEEE 7th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 9–11 January 2017; pp. 1–6. [Google Scholar]
- Stočes, M.; Vaněk, J.; Masner, J.; Pavlík, J. Internet of things (IoT) in agriculture-selected aspects. Agris Online Pap. Econ. Inform. 2016, 8, 83–88. [Google Scholar] [CrossRef]
- Navarro, E.; Costa, N.; Pereira, A. A systematic review of IoT solutions for smart farming. Sensors 2020, 20, 4231. [Google Scholar] [CrossRef] [PubMed]
- Farooq, M.S.; Riaz, S.; Abid, A.; Umer, T.; Zikria, Y.B. Role of IoT technology in agriculture: A systematic literature review. Electronics 2020, 9, 319. [Google Scholar] [CrossRef] [Green Version]
- Perles, A.; Mercado, R.; Capella, J.V.; Serrano, J.J. Ultra-Low power optical sensor for xylophagous insect detection in wood. Sensors 2016, 16, 1977. [Google Scholar] [CrossRef] [Green Version]
- Azfar, S.; Nadeem, A.; Basit, A. Pest detection and control techniques using wireless sensor network: A review. J. Entomol. Zool. Stud. 2015, 3, 92–99. [Google Scholar]
- Bhanu, K.N.; Sahana, K. Farm Vigilance: Smart IoT System for Farmland Monitoring and Animal Intrusion Detection using Neural Network. In Proceedings of the 2021 Asian Conference on Innovation in Technology (ASIANCON), Pune, India, 27–29 August 2021; pp. 1–6. [Google Scholar]
- Pal, P.; Sharma, R.P.; Tripathi, S.; Kumar, C.; Ramesh, D. Genetic algorithm optimized node deployment in IEEE 802.15.4 potato and wheat crop monitoring infrastructure. Sci. Rep. 2021, 11, 8231. [Google Scholar] [CrossRef]
- Sharma, R.P.; Ramesh, D.; Pal, P.; Tripathi, S.; Kumar, C. IoT-enabled IEEE 802.15.4 WSN monitoring infrastructure-driven fuzzy-logic-based crop pest prediction. IEEE Internet Things J. 2021, 9, 3037–3045. [Google Scholar] [CrossRef]
- Mehdi, K.; Lounis, M.; Bounceur, A.; Kechadi, T. Cupcarbon: A multi-agent and discrete event wireless sensor network design and simulation tool. In Proceedings of the 7th ICST Conference on Simulation Tools and Techniques, Lisbon, Portugal, 17–19 March 2014; pp. 126–131. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research | Proposed System | Country | Crop | Pest or Disease | Contribution |
|---|---|---|---|---|---|
| Tatya et al. [12] | Ontology-based Expert System. | India | Cotton | Multiple Pests and Diseases. | They have suggested an Ontology-based expert system to answer related to pests and diseases using this system which uses Web-based technologies. |
| Xiao et al. [13] | Recurrent Neural Networks (RNN), a Class of Artificial Neural Network | China | Cotton | Multiple Pests and Diseases. | This research has aimed to predict pests and diseases using a long-short-term memory (LSTM) network. This system converts pest occurrence problems into time series problems and predicts the occurrence of pests and diseases. |
| Li et al. [14] | BP Neural network and web-based Expert system | China | Cotton | Multiple Diseases | Based on a BP-based neural network algorithm, a web technologies-based system has been designed in which a database of diseases has been developed, and decisions are made through the interference engine. The accuracy of the system is about 80–90%. |
| Gao, D. et al. [15] | Agriculture Framework based on IoT and UAV. | China | Wheat | Multiple diseases | Attempts have been made to create an agricultural framework that shows the relationship between weather components and diseases. The sensors of the proposed system run on solar energy and a new flight mode have also been used for drones. |
| Vanegas, F. et al. [16] | Predictive Model for insect detection | Australia | Grape | Grape Phylloxera | They have used a UAV integrated with advanced digital hyperspectral, multispectral, and RGB sensors. He has proposed a method in which ground and aerial surveys were carried out by drones and sensors by collecting data through various surveys. |
| Dong, Y. et al. [17] | Disease Diagnostic system. | China | Cotton | Multiple Diseases | They have designed and proposed a cotton disease diagnostic system (CDDS), which is based on case-based reasoning (CBR) and fuzzy logic. This system diagnoses diseases and proposes treatment. If we provide at least four symptoms as input to this system, it will give more than 90% accurate results. |
| Koubaa, A. [18] | IoT Framework | Saudia Arabia | Palm/Dates | Red Palm Weevil | They have proposed a framework in which a smart palm monitoring prototype has been developed, and it monitors palms remotely using smart IoT-based agriculture sensors, which are capable of detecting red palm infestation in its early stages. It also uses web or mobile applications to interact with farms remotely. They have used an industrial-level IoT platform to interface between the user and system layers. |
| Apeksha, T. [19] | IoT and DIP-based Framework | India | Multiple Crops | Multiple Diseases | Researchers have proposed an IoT-based system that, in conjunction with digital image processing, detects various plant leaf diseases. In this system, some sensors monitor the values of various parameters of the environment, while many diseases can be detected by taking pictures with the help of digital cameras and processing digital images on them. |
| Materne, N. [20] | IoT Framework | Indonesia | Multiple | Multiple | This research has proposed an IoT framework that will monitor eight specific field parameters on a daily basis. A predictive model has also been developed that has been able to identify diseases and insects through machine learning. |
| Sharma, R. P. [21] | IoT Framework | India | Rice and Sugarcane | Multiple | WSN Monitoring Infrastructure-Driven Fuzzy-Logic-Based Crop Pest prediction proposed. In which pests and diseases are identified due to various weather factors. The measured parameter includes temperature, relative humidity, and rainfall. The acquired weather information is used as training data by the genetic algorithm (GA) to optimize the rule base of a fuzzy logic-based prediction system. |
| Hop Types | N | Mean | Std. Deviation | Std. Error Mean | |
|---|---|---|---|---|---|
| Time Consumed in Milliseconds | Single Hop | 26 | 0.000008240 | 0.0000000000 | 0.0000000000 |
| Multi Hop | 26 | 0.003017301 | 0.0006120497 | 0.0001200328 |
| Independent Samples Test | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Levene’s Test for Equality of Variances | t-Test for Equality of Means | |||||||||
| F | Sig. | t | df | Sig. (2-Tailed) | Mean Difference | Std. Error Difference | 95% Confidence Interval of the Difference | |||
| Lower | Upper | |||||||||
| Time Consumed in Milliseconds | Equal variances assumed | 4.340 | 0.042 | −25.069 | 50 | 0.000 | −0.0030090606 | 0.0001200328 | −0.0032501536 | −0.0027679675 |
| Equal variances not assumed | −25.069 | 25.000 | 0.000 | −0.0030090606 | 0.0001200328 | −0.0032562728 | −0.0027618483 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azfar, S.; Nadeem, A.; Ahsan, K.; Mehmood, A.; Almoamari, H.; Alqahtany, S.S. IoT-Based Cotton Plant Pest Detection and Smart-Response System. Appl. Sci. 2023, 13, 1851. https://doi.org/10.3390/app13031851
Azfar S, Nadeem A, Ahsan K, Mehmood A, Almoamari H, Alqahtany SS. IoT-Based Cotton Plant Pest Detection and Smart-Response System. Applied Sciences. 2023; 13(3):1851. https://doi.org/10.3390/app13031851
Chicago/Turabian StyleAzfar, Saeed, Adnan Nadeem, Kamran Ahsan, Amir Mehmood, Hani Almoamari, and Saad Said Alqahtany. 2023. "IoT-Based Cotton Plant Pest Detection and Smart-Response System" Applied Sciences 13, no. 3: 1851. https://doi.org/10.3390/app13031851