
Intelligent Feedback Analysis of Fluid–Solid Coupling of Surrounding Rock of Tunnel in Water-Rich Areas

Abstract
:1. Introduction
2. The Parameter Identification Method of Fluid–Solid Coupling of Surrounding Rock Based on GP-DE
2.1. The Problem of Parameter Inversion of Fluid–Solid Coupling of Surrounding Rock
2.2. The GP Algorithm
2.3. The GP Optimized by DE
- (1)
- Generating initial population
- (2)
- Mutation operation
- (3)
- Crossover operation
- (4)
- Selection operation
2.4. The Parameters Identification Flowchart
- (1)
- Orthogonal samples are obtained by numerical simulation, and learning samples are established according to the samples.
- (2)
- GP is used to learn the rules of learning samples.
- (3)
- The DE method is used to generate the initial population.
- (4)
- The mapping established in step 2 is called to calculate the output variables corresponding to the initial population in step 3.
- (5)
- Compare the calculated results of the previous step with the field-measured results. Enter step 7 when it meets the fitness requirements; otherwise, enter step 6.
- (6)
- Perform the DE optimization operation described above to generate a new initial population, and return to step 4.
- (7)
- Obtain and record the population at this time, and this result is the target parameter of the required back analysis.

3. Engineering Application
3.1. Engineering Overview
3.2. The Principle of Fluid–Solid Coupling Modeling
- (1)
- Equilibrium equation
- (2)
- Constitutive equation
- (3)
- Compatibility equation
- (4)
- Boundary condition
- (5)
- Time scale
3.3. Numerical Simulation Model
3.4. Parameters Identification Results
3.5. Analysis of Tunnel Excavation Footage Based on Back Analysis Results
4. Discussion
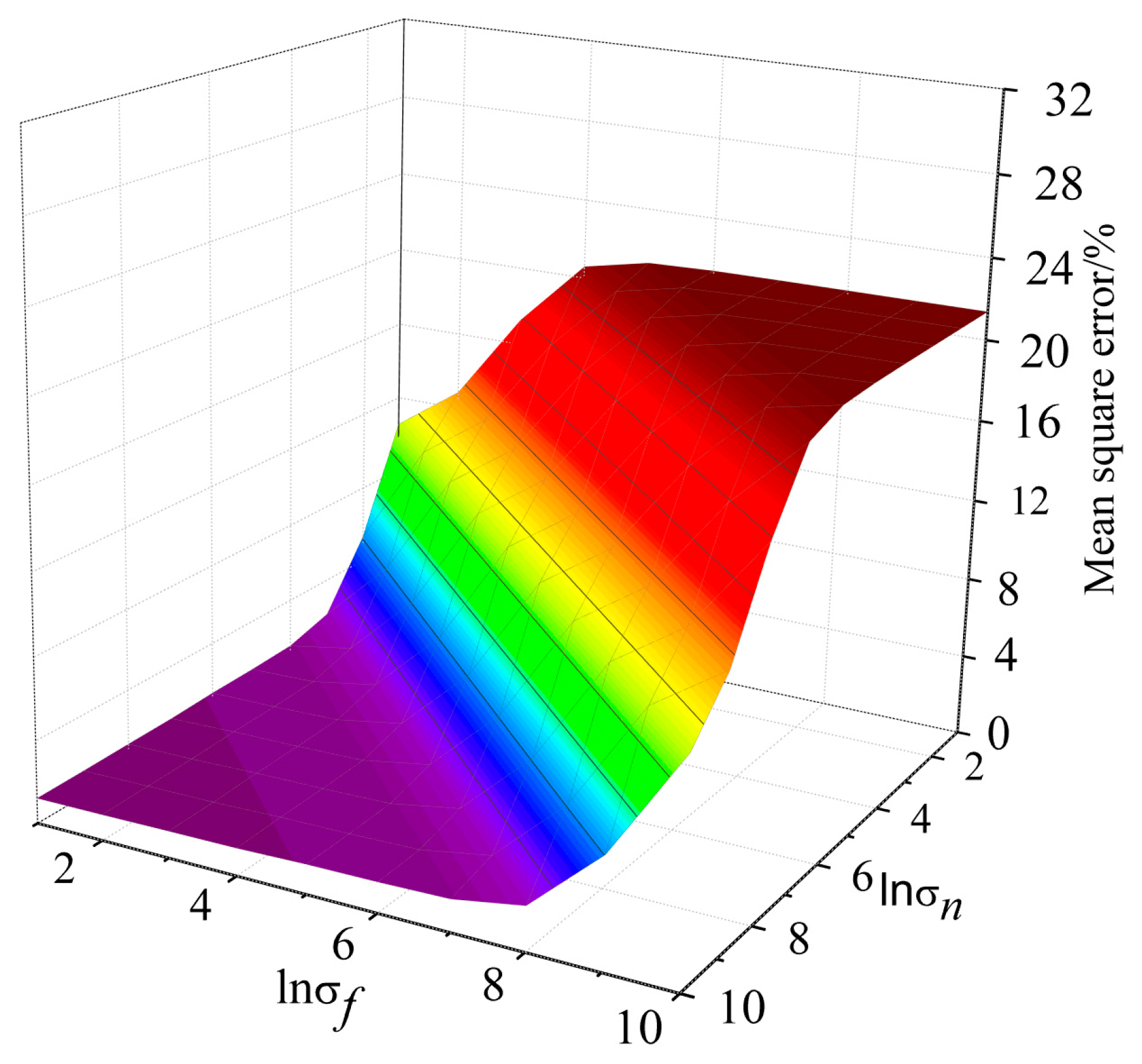
4.1. The Influence of GP Parameters on the Results of Back Analysis
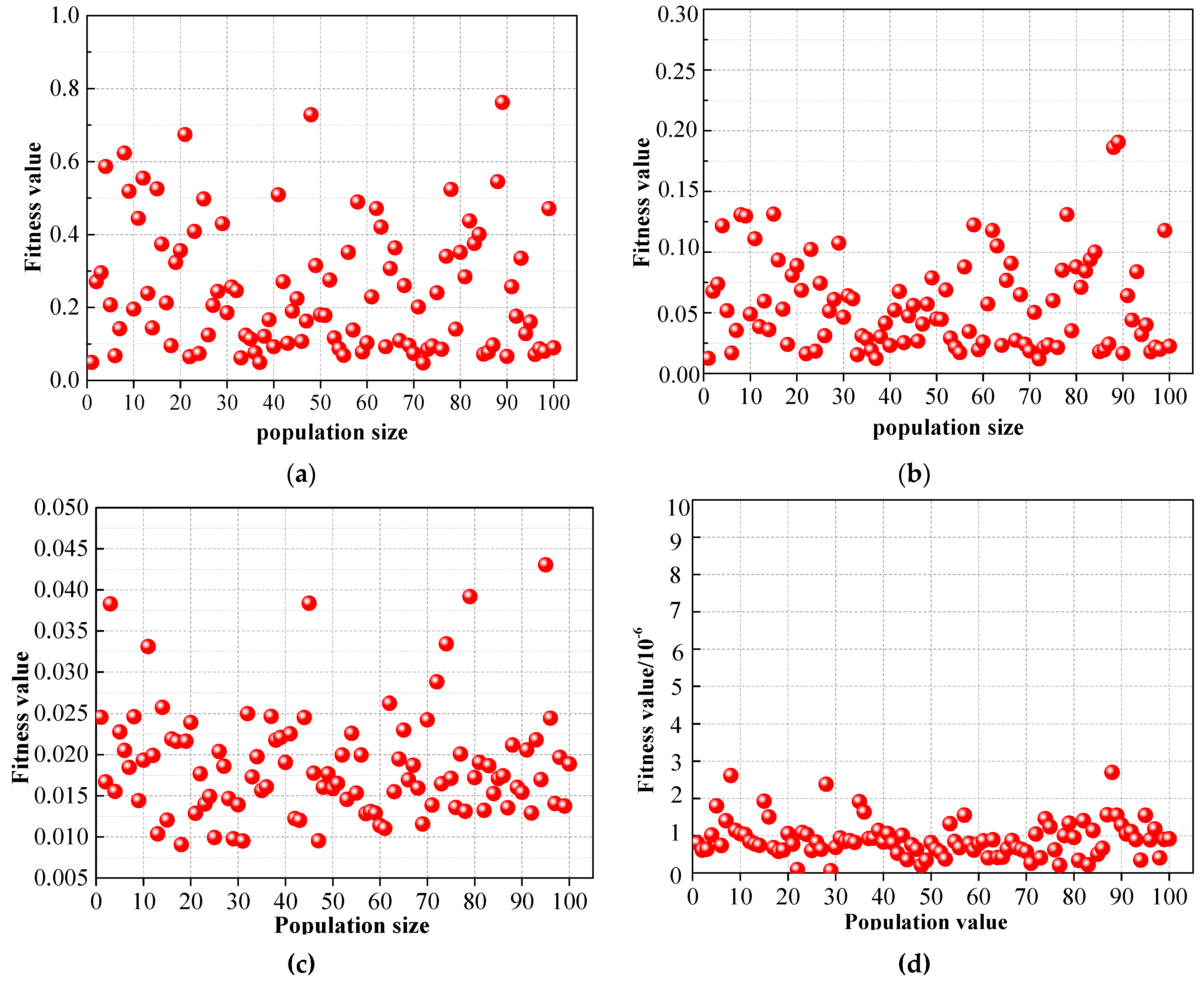
4.2. The Influence of DE Parameters
5. Conclusions
- To realize parameter feedback optimization of tunnel construction in water-rich areas, a feedback analysis method of tunnel parameters under fluid–solid coupling conditions based on GP and DE was established based on an intelligent optimization algorithm.
- Choosing the appropriate parameters of GP by DE is important to improve the accuracy of the back analysis results. The variation parameters of DE have an impact on the convergence speed. CR = 0.9, F = 0.7, N = 100 and the difference strategy DE/Best/1 were selected for this study.
- The optimal hydrogeological parameters of the surrounding rock were obtained by a back analysis algorithm based on GP-DE. The optimal parameters from back analysis are E1 = 2.83 GPa, μ1 = 0.33, E2 = 1.24 GPa, μ2 = 0.36, K1 = 0.285 m/d and K2 = 0.658 m/d, providing an effective method for obtaining the surrounding rock parameters of similar projects.
- Based on the back analysis results, different amounts of excavation footage of the tunnel were selected to analyze their impact on the tunnel. The optimal excavation footage under four working conditions was selected by analyzing the distribution of the plastic zone.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Liang, Z.H.; Zhang, Y.B.; Tang, S.B. Size effect of rock messes and associated representative element properties. Chin. J. Rock Mech. Eng. 2013, 32, 1157–1166. [Google Scholar]
- Xu, K.; Shen, C.H.; Hu, Y.T. The Optimization Research on the Foundation Treatment of Sand Drain on Vietnam Highway. Highw. Eng. 2017, 240–243. [Google Scholar]
- Shao, Y.; Macari, E. Information Feedback Analysis in Deep Excavations. Int. J. Geomech. 2008, 8, 91–103. [Google Scholar] [CrossRef]
- Zeng, Y.Z.; Hu, L.; Huang, M. Research of Surrounding Rock Parametric Inversion on Mountain Tunnel. Wuhan Ligong Daxue Xuebao (Jiaotong Kexue Yu Gongcheng Ban)/J. Wuhan Univ. Technol. (Transp. Sci. Eng.) 2018, 72–76. [Google Scholar]
- Kavanagh, K.T.; Clough, R.W. Finite element applications in the characterization of elastic solids. Int. J. Solids Struct. 1971, 7, 11–23. [Google Scholar] [CrossRef]
- Lu, F.; Yuan, B.Y.; Yuan, L. Rock parameters inversion for estimating the maximum heights of two failure zones in overburden strata of a coal seam. Min. Sci. Technol. (China) 2011, 21, 41–47. [Google Scholar]
- Ge, H.W.; Liang, Y.C.; Liu, W. Applications of artificial neural networks and genetic algorithms to rock mechanics. Chin. J. Rock Mech. Eng. 2004, 1542–1550. [Google Scholar]
- Zhang, X.; Yang, F.; Ren, X.H.; Zhang, D.F. Back Analysis of Surrounding Rock Mechanical Parameters of Underground Caverns Based on Genetic Algorithm. Mod. Tunn. Technol. 2018, 53–58. [Google Scholar]
- Zhang, T.J.; Xu, L. Inversion of Mechanical Parameters of Slope Rock Based on Asynchronous Particle Swarm Optimization. J. China Three Gorges Univ. 2014, 38–41. [Google Scholar]
- Goh, Y.; Zhang, R.; Zhang, W.; Zhang, Y. Evaluating stability of underground entry-type excavations using multivariate adaptive regression splines and logistic regression. Tunn. Undergr. Space Technol. 2017, 70, 148–154. [Google Scholar] [CrossRef]
- Lü, Q.; Chan, C.; Low, B.K. Probabilistic evaluation of ground-support interaction for deep rock excavation using artificial neural network and uniform design. Tunn. Undergr. Space Technol. 2012, 32, 1–18. [Google Scholar] [CrossRef]
- Sarkar, K.; Tiwary, A.; Singh, T.N. Estimation of strength parameters of rock using artificial neural networks. Bull. Eng. Geol. Environ. 2010, 69, 599–606. [Google Scholar] [CrossRef]
- Feng, X.T.; Zhang, Z.Q.; Yang, C.X. Study on genetic-neural net work method of displacement back analysis. Chin. J. Rock Mech. Eng. 1999, 18, 529–533. [Google Scholar]
- Deng, J.; Lee, C.F.; Ge, X. Application of BP networkand genetic algorithm to displacement back analysis of rock slopes. Chin. J. Rock Mech. Eng. 2001, 20, 1–5. [Google Scholar]
- Zhou, G.N.; Sun, Y.Y. Application of Genetic Algorithm Based BP Neural Network to Parameter Inversion of Surrounding Rock and Deformation Prediction. Mod. Tunn. Technol. 2018, 55, 107–113. [Google Scholar]
- Wang, J.X.; Dong, J.H.; Chen, S.L. Multi-parameters Inversion of Stress-Seepage-Damage Coupling Model Based on DEPSO Intelligent Algorithm. J. Basic Sci. Eng. 2018, 872–887. [Google Scholar]
- Li, Y.G.; Jiao, P.P.; Qiao, W.D. Prediction of Steering Behaviors on Curves Based on BP Neural Network Optimized by Modified PSO. J. Highw. Transp. Res. Dev. 2019, 36, 128–136. [Google Scholar]
- Rasmussen, C.E.; Williams, C.K.I. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Li, S.C.; Zhao, Y.; Xu, B.S.; Li, L.P.; Liu, Q.; Wang, Y.K. Study of determining permeability coefficient in water inrush numerical calculation of subsea tunnel. Rock Soil Mech. 2012, 33, 1497–1504. [Google Scholar]
- Sun, Q.C.; Li, S.J.; Zhao, H.B.; Zheng, M.Z.; Yang, Z.Y. Probabilistic back analysis of rock mechanical parameters based on displacement and relaxation depth. Chin. J. Rock Mech. Eng. 2019, 38, 1884–1894. [Google Scholar]
- Zhang, Y.X.; Hou, Z.J. Back analysis of rock mass parameters based on support vector machine and Bayesian method. Yangtze River 2022, 186–192. [Google Scholar]
- Zhang, Y.X. Probabilistic Inverse Analysis of Geotechnical Parameters and Deformation Prediction based on Bayesian Theory; Zhejiang University: Hangzhou, China, 2022. [Google Scholar]
- Sun, Y. Study on Back Analysis Method Based on Multi-Objective Optimization and Bayesian Theory for Geotechnical Engineering; Wuhan University: Wuhan, China, 2019. [Google Scholar]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Wang, L.; Li, L. An effective differential evolution with level comparison for constrained engineering design. Struct. Multidiscip. Optim. 2009, 41, 947–996. [Google Scholar] [CrossRef]
- Luo, Q.K.; Wu, J.F.; Yang, Y.; Wu, J.C.; Ma, S.F. Identification of the spatial variability of aquifer hydraulic conductivity. J. Nanjing Univ. (Nat. Sci.) 2016, 448–455. [Google Scholar]
- Yang, Y.; Wu, J.C.; Luo, Q.K.; Wu, J.F. Analysis of the Uncertainty of Groundwater Numerical Simulation Based on the DREAM Algorithm. Geol. Rev. 2016, 62, 353–361. [Google Scholar]
- Zhang, W.G.; Gu, H.L.; Zhang, Q.; Wang, L.; Wang, L.Q. Probabilistic back analysis of soil parameters and displacement prediction of unsaturated slopes using Bayesian updating. Rock Soil Mech. 2022, 1112–1122. [Google Scholar]
- Wu, F.; Zhang, L.L.; Zheng, W.T.; Wei, X. Probabilistic back analysis method for unsaturated soil slopes with fluid-solid coupling process based on polynomial chaos expansion. Chin. J. Geotech. Eng. 2018, 2215–2222. [Google Scholar]
- Wang, F.M.; Miao, L.; Guo, X.M. Inverse analysis on seepage of dams based on fluid-solid coupling. J. Hydroelectr. Eng. 2008, 27, 60–64. [Google Scholar]
- Zheng, Y.F.; Zhang, L.L.; Zhang, J.; Zhang, J.G.; Yu, Y.T. Multi-objective probabilistic inverse analysis of rainfall-induced landslide based on time-varied data. Rock Soil Mech. 2017, 38, 3371–3384. [Google Scholar]
- Xu, C.Y.; Han, L.J.; Tian, M.L.; Wang, Y.J. Coupled Grouting Reinforcement Mechanism and Displacement Back Analysis of Mechanical Parameters of Surrounding Rock. Saf. Coal Mines 2020, 155–160. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elastic Modulus/GPa | Poisson’s Ratio | Cohesion /kPa | Internal Friction Angle/° | Permeability Coefficient/(m/d) | |
|---|---|---|---|---|---|
| Slightly weathered gneiss | 4.19 | 0.26 | 27 | 38 | 0.025 |
| Moderately weathered gneiss | —— | —— | 21 | 42 | —— |
| Strongly weathered gneiss | —— | —— | 15 | 46 | —— |
| Subgrade soil | 0.15 | 0.35 | 23 | 19 | 0.843 |
| Primary support | 25 | 0.18 | 20,000 | 34 | 6.3 × 10−4 |
| Bolt | 200 | —— | —— | 25 | —— |
| Middle wall | 25 | 0.18 | 20,000 | 34 | —— |
| E1 (GPa) | μ1 | E2 (GPa) | μ2 | K1 (m/d) | K2 (m/d) | AZ (mm) | AB (mm) | BC (mm) | DZ (mm) | P (105) (Pa) | F(m3/m × d) | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2.85 | 0.21 | 1.81 | 0.25 | 0.196 | 0.4 | 5.961 | 3.64 | 0.355 | 1.313 | 1.337 | 9.07 |
| 2 | 3.52 | 0.26 | 1.81 | 0.3 | 0.24 | 0.495 | 5.445 | 3.481 | 0.291 | 1.186 | 1.264 | 8.866 |
| 3 | 4.19 | 0.31 | 1.81 | 0.35 | 0.284 | 0.59 | 5.002 | 3.342 | 0.763 | 1.097 | 1.16 | 5.34 |
| 4 | 5.86 | 0.36 | 1.81 | 0.4 | 0.328 | 0.685 | 4.513 | 3.224 | 1.425 | 0.982 | 1.026 | 3.1 |
| 5 | 6.53 | 0.41 | 1.81 | 0.45 | 0.372 | 0.78 | 4.12 | 3.175 | 2.149 | 1.015 | 0.84 | 3.04 |
| 6 | 4.19 | 0.21 | 2.23 | 0.3 | 0.328 | 0.78 | 5.193 | 3.471 | 0.165 | 1.496 | 1.348 | 4.31 |
| 7 | 5.86 | 0.26 | 2.23 | 0.35 | 0.372 | 0.4 | 4.717 | 3.288 | 0.002 | 0.921 | 1.311 | 3.74 |
| 8 | 6.53 | 0.31 | 2.23 | 0.4 | 0.196 | 0.495 | 4.431 | 3.202 | 0.753 | 0.883 | 1.162 | 3.52 |
| 9 | 2.85 | 0.36 | 2.23 | 0.45 | 0.24 | 0.59 | 4.362 | 3.234 | 1.035 | 1.656 | 1.045 | 3.33 |
| 10 | 3.52 | 0.41 | 2.23 | 0.25 | 0.284 | 0.685 | 4.773 | 3.167 | 1.696 | 0.706 | 0.721 | 6.34 |
| 11 | 6.53 | 0.21 | 2.65 | 0.35 | 0.24 | 0.685 | 4.598 | 3.306 | 0.018 | 0.9 | 1.358 | 3.23 |
| 12 | 2.85 | 0.26 | 2.65 | 0.4 | 0.284 | 0.78 | 4.819 | 3.367 | 0.012 | 1.494 | 1.231 | 3.38 |
| 13 | 3.52 | 0.31 | 2.65 | 0.45 | 0.328 | 0.4 | 4.283 | 3.209 | 0.511 | 1.414 | 1.217 | 3.45 |
| 14 | 4.19 | 0.36 | 2.65 | 0.25 | 0.372 | 0.495 | 4.663 | 3.135 | 0.941 | 0.66 | 0.882 | 6.4 |
| 15 | 5.86 | 0.41 | 2.65 | 0.3 | 0.196 | 0.59 | 4.205 | 3.049 | 1.57 | 0.613 | 0.72 | 3.79 |
| 16 | 3.52 | 0.21 | 3.07 | 0.4 | 0.372 | 0.59 | 4.639 | 3.343 | 0.233 | 1.318 | 1.355 | 3.37 |
| 17 | 4.19 | 0.26 | 3.07 | 0.45 | 0.196 | 0.685 | 4.24 | 3.232 | 0.151 | 1.287 | 1.283 | 3.18 |
| 18 | 5.86 | 0.31 | 3.07 | 0.25 | 0.24 | 0.78 | 4.462 | 3.143 | 0.48 | 0.644 | 0.977 | 3.35 |
| 19 | 6.53 | 0.36 | 3.07 | 0.3 | 0.284 | 0.4 | 4.184 | 3.039 | 0.927 | 0.572 | 0.895 | 3.89 |
| 20 | 2.85 | 0.41 | 3.07 | 0.35 | 0.328 | 0.495 | 4.469 | 3.097 | 1.261 | 0.959 | 0.749 | 7.38 |
| 21 | 5.86 | 0.21 | 3.49 | 0.45 | 0.284 | 0.495 | 4.123 | 3.2 | 0.03 | 1.028 | 1.398 | 4.5 |
| 22 | 6.53 | 0.26 | 3.49 | 0.25 | 0.328 | 0.59 | 4.38 | 3.156 | 0.151 | 0.642 | 1.114 | 3.36 |
| 23 | 2.85 | 0.31 | 3.49 | 0.3 | 0.372 | 0.685 | 4.857 | 3.226 | 0.227 | 0.89 | 0.95 | 6.56 |
| 24 | 3.52 | 0.36 | 3.49 | 0.35 | 0.196 | 0.78 | 4.39 | 3.111 | 0.692 | 0.88 | 0.829 | 3.86 |
| 25 | 4.19 | 0.41 | 3.49 | 0.4 | 0.24 | 0.4 | 3.959 | 3.004 | 1.214 | 0.908 | 0.761 | 6.17 |
| E1 (GPa) | μ1 | E2 (GPa) | μ2 | K1 (m/d) | K2 (m/d) | AZ (mm) | AB (mm) | BC (mm) | DZ (mm) | P (105) (Pa) | F (m3/m × d) | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 4.19 | 0.26 | 1.81 | 0.035 | 0.372 | 0.875 | 5.053 | 3.352 | 1.175 | 1.164 | 1.090 | 6.335 |
| 2 | 5.86 | 0.36 | 2.23 | 0.20 | 0.284 | 0.780 | 4.374 | 3.136 | 0.447 | 0.797 | 0.861 | 4.291 |
| 3 | 3.52 | 0.46 | 2.65 | 0.40 | 0.196 | 0.685 | 4.049 | 3.032 | 0.698 | 0.621 | 0.750 | 3.310 |
| 4 | 6.53 | 0.21 | 3.07 | 0.25 | 0.416 | 0.590 | 4.503 | 3.177 | 0.586 | 0.867 | 0.904 | 4.680 |
| 5 | 2.85 | 0.31 | 3.49 | 0.45 | 0.328 | 0.495 | 4.249 | 3.096 | 0.313 | 0.729 | 0.818 | 3.915 |
| Back Analysis Result | Relative Error | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| E1 (GPa) | μ1 | E2 (GPa) | μ2 | K1 (m/d) | K2 (m/d) | E1 (%) | μ1 (%) | E2 (%) | μ2 (%) | K1 (%) | K2 (%) | |
| 1 | 3.85 | 0.29 | 1.81 | 0.33 | 0.36 | 0.82 | 0.00 | −9.40 | 8.74 | 6.81 | 4.49 | 7.24 |
| 2 | 6.96 | 0.35 | 2.39 | 0.22 | 0.26 | 0.78 | −6.69 | 3.79 | 3.39 | −8.19 | 9.15 | 0.00 |
| 3 | 3.37 | 0.47 | 2.49 | 0.37 | 0.20 | 0.73 | 6.43 | −1.72 | 4.54 | 7.50 | 0.00 | −6.16 |
| 4 | 6.19 | 0.23 | 3.26 | 0.27 | 0.45 | 0.58 | −5.80 | −8.41 | 5.56 | −8.45 | −7.01 | 2.02 |
| 5 | 3.07 | 0.34 | 3.49 | 0.41 | 0.33 | 0.52 | 0.00 | −7.98 | −7.14 | 9.22 | −1.60 | −4.81 |
| 6 | 6.43 | 0.39 | 3.74 | 0.28 | 0.25 | 0.38 | 4.55 | 6.33 | −8.85 | 7.14 | −4.57 | 5.26 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhan, T.; Guo, X.; Jiang, T.; Jiang, A. Intelligent Feedback Analysis of Fluid–Solid Coupling of Surrounding Rock of Tunnel in Water-Rich Areas. Appl. Sci. 2023, 13, 1479. https://doi.org/10.3390/app13031479
Zhan T, Guo X, Jiang T, Jiang A. Intelligent Feedback Analysis of Fluid–Solid Coupling of Surrounding Rock of Tunnel in Water-Rich Areas. Applied Sciences. 2023; 13(3):1479. https://doi.org/10.3390/app13031479
Chicago/Turabian StyleZhan, Tao, Xinping Guo, Tengfei Jiang, and Annan Jiang. 2023. "Intelligent Feedback Analysis of Fluid–Solid Coupling of Surrounding Rock of Tunnel in Water-Rich Areas" Applied Sciences 13, no. 3: 1479. https://doi.org/10.3390/app13031479