
Analysis and Design of Infrared Search and Track System with Afocal Zoom Telescope

Abstract
:1. Introduction
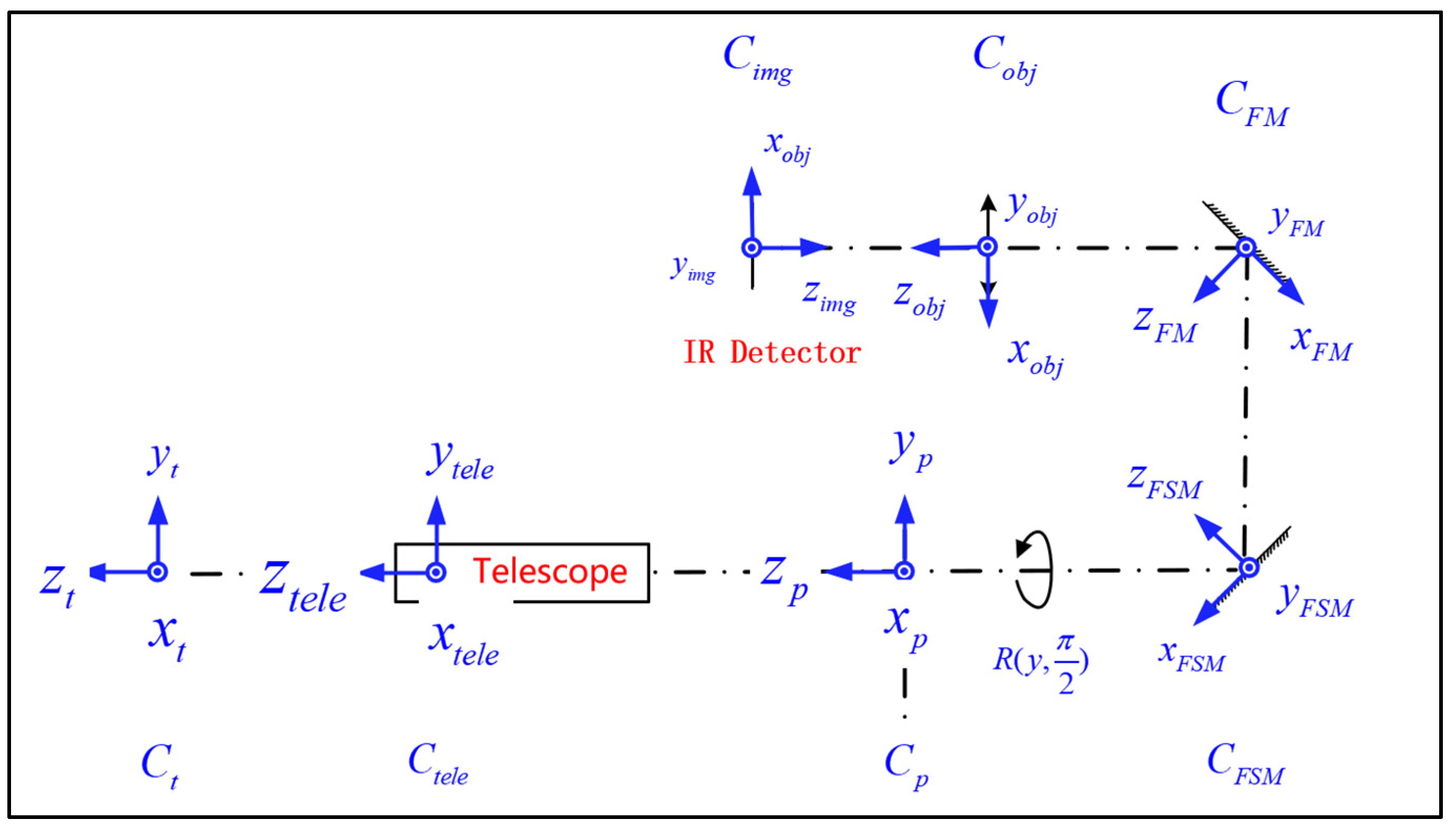
2. Homogeneous Coordinate Transformation in IRST
2.1. Establishment of Coordinate System
2.2. Imaging Model under Static Condition
2.3. Imaging Model under Dynamic Condition
3. Image Wandering Analysis of an IRST
3.1. Specifications
3.2. System Design Considerations
- Effective focal length
- b
- Magnification of the telescope
- c
- Angular velocity of FSM
- d
- Image wandering
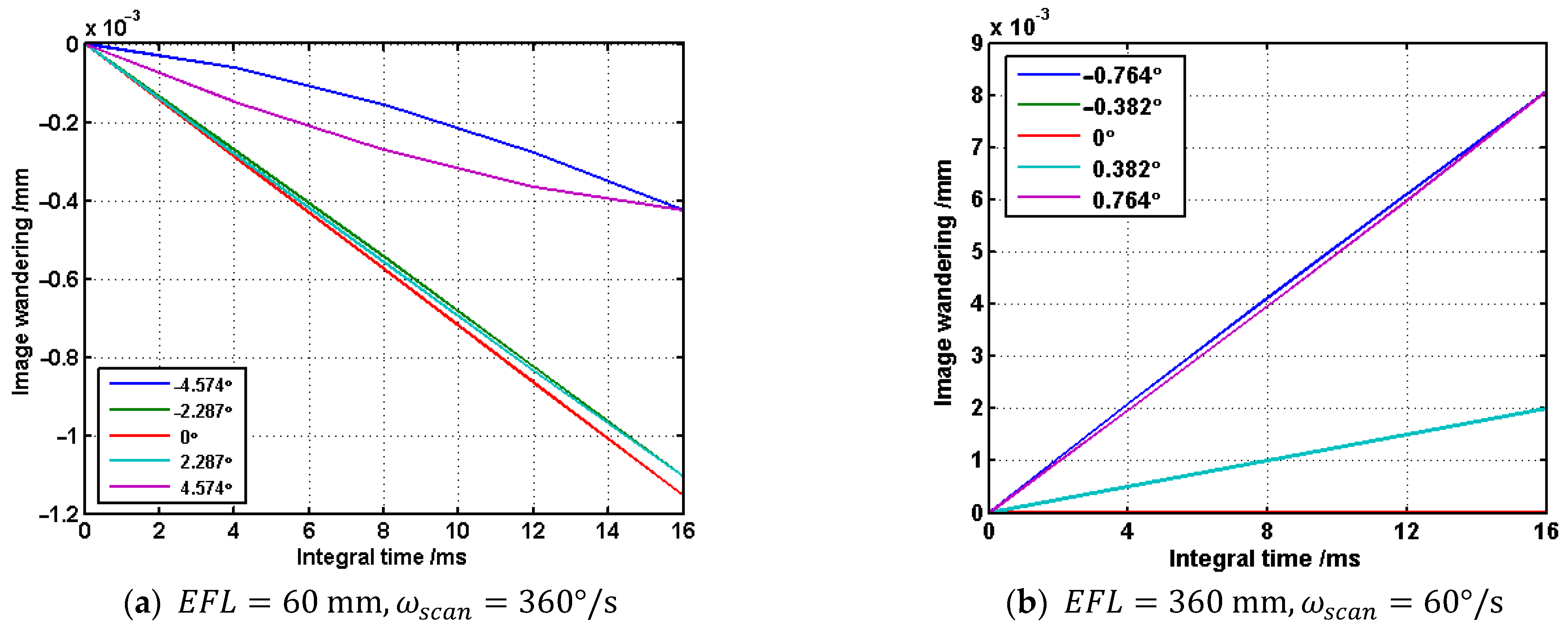
3.3. Residual Image Wandering Simulation
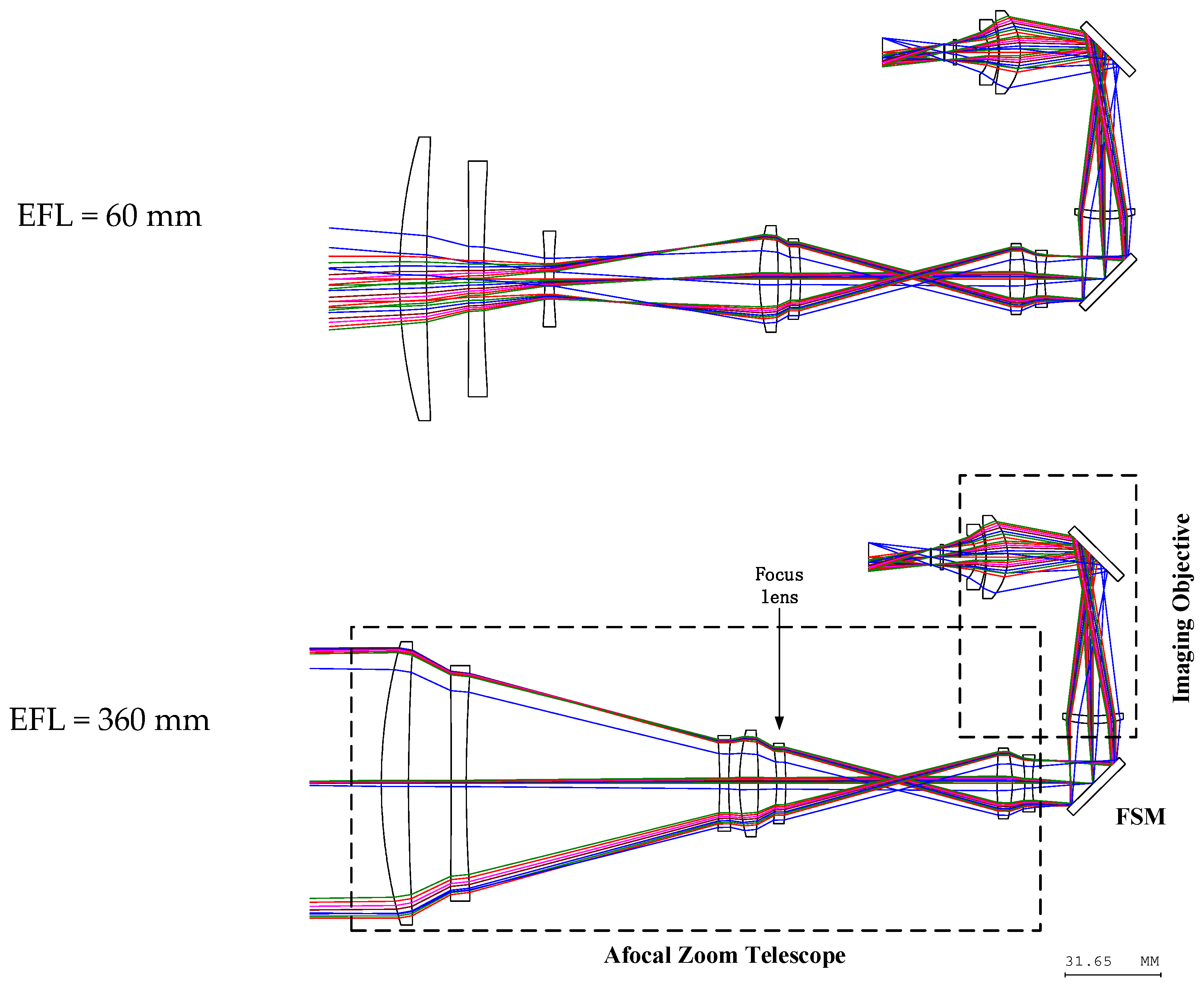
4. Design of the IRST Optics
4.1. Design and Optimization Process
4.2. Design Results
4.3. Cam Curve and Magnification Wandering
4.4. Image Wandering
4.5. Imaging Performance
4.6. Manufacturability
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Maltese, D.; Deyla, O.; Vernet, G.; Preux, C.; Hilt, G.; Nougues, P.O., II. New generation of naval IRST: Example of EOMS NG. In Proceedings of the Infrared Technology and Applications 2010, Orlando, FL, USA, 5–9 April 2010. [Google Scholar]
- Driggers, R.G.; Halford, C.; Theisen, M.J.; Gaudiosi, D.M.; Olson, S.C.; Tener, G.D. Staring array infrared search and track performance with dither and stare step. Opt. Eng. 2018, 57, 53101. [Google Scholar] [CrossRef]
- Holst, G.C.; Krapels, K.A.; Olson, C.; Theisen, M.; Pace, T.; Halford, C.; Driggers, R. Model development and system performance optimization for staring Infrared Search and Track (IRST) sensors. In Proceedings of the Infrared Imaging Systems: Design, Analysis, Modeling, and Testing 2016, Baltimore, MD, USA, 17–21 April 2016. [Google Scholar]
- Xiu, J.; Huang, P.; Li, J.; Zhang, H.; Li, Y. Line of sight and image motion compensation for step and stare imaging system. Appl. Sci. 2020, 10, 7119. [Google Scholar] [CrossRef]
- Barr, J.R.; MacDonald, M.; Jeffery, G.; Troughton, M. Electro-optic product design for manufacture: Where next? In Proceedings of the Technologies for Optical Countermeasures 2016, Edinburgh, UK, 26–29 September 2016. [Google Scholar]
- Sun, C.; Ding, Y.; Wang, D.; Tian, D. Backscanning step and stare imaging system with high frame rate and wide coverage. Appl. Opt. 2015, 54, 4960–4965. [Google Scholar] [CrossRef] [PubMed]
- Miller, J.L.; Way, S.; Ellison, B.; Archer, C. Design challenges regarding high-definition electro-optic/infrared stabilized imaging systems. Opt. Eng. 2013, 52, 61310. [Google Scholar] [CrossRef]
- Snarski, S.; Barnes, R.; Khan, N.; Baker, J.; Webb, J. Infrared search and track (IRST) for long-range, wide-area detect and avoid (DAA) on small unmanned aircraft systems (sUAS). In Proceedings of the Autonomous Systems 2022, Orlando, FL, USA, 3 April–13 June 2022. [Google Scholar]
- Fortunato, L.; Colombi, G.; Ondini, A.; Quaranta, C.; Giunti, C.; Sozzi, B.; Balzarotti, G. SKYWARD: The next generation airborne infrared search and track. In Proceedings of the Infrared Technology and Applications 2016, Baltimore, MD, USA, 17–21 April 2016. [Google Scholar]
- Valenta, C.R.; Silva, Z.J. Towards single aperture RF/EO/IR systems: Multi-spectral sensing and communication. In Proceedings of the Laser Radar Technology and Applications, Online, 27 April–9 May 2020. [Google Scholar]
- Artan, G.G.; Tombul, G.S. The future trends of EO/IR systems for ISR platforms. In Proceedings of the Image Sensing Technologies, Orlando, FL, USA, 3 April–13 June 2022. [Google Scholar]
- Qu, R.; Duan, J.; Liu, K.; Cao, J.; Yang, J. Optical Design of a 4× Zoom Lens with a Stable External Entrance Pupil and Internal Stop. Photonics 2022, 9, 191. [Google Scholar] [CrossRef]
- Kawachi, D. Image Motion and Its Compensation for the Oblique Frame Camera. Photogramm. Eng. 1965, 31, 154–165. [Google Scholar]
- Yan, C.X.; Wang, J.Q. Method of coordination transformation for IM&IMC calculation in aerospace camera system. Opt. Precis. Eng. 2000, 8, 203–207. [Google Scholar]
- Chen, C.S.; Wang, S.Y.; Li, F.M.; Shi, Y.B.; Huang, F. Image Motion Compensation Design and Analysis of Infrared Search and Tracking System. Semicond. Optoelectron. 2018, 39, 95. [Google Scholar]
- Sun, J.; Ding, Y.; Zhang, H.; Yuan, G.; Zheng, Y. Conceptual design and image motion compensation rate analysis of two-axis fast steering mirror for dynamic scan and stare imaging system. Sensors 2021, 21, 6441. [Google Scholar] [CrossRef]
- Jean-Claude, F.; Dominique, D.; Yves, K. ARTEMIS: First naval staring IRST in service. In Proceedings of the Infrared Technology and Applications 2010, Orlando, FL, USA, 5–9 April 2010. [Google Scholar]
- Gianni, B.; Monica, O.; Cristian, L.; Alessandro, R.; Marco, D.; Nicola, A. Development of a panoramic third generation IRST: Initial study and experimental work. In Proceedings of the Infrared Technology and Applications 2013, Baltimore, MD, USA, 29 April–3 May 2013. [Google Scholar]
- Dat, N.V.; Dang, X.D.; Dat, V.X. Optical design for multi-functional IRST system using high-definition detector. In Proceedings of the Optical Design and Testing 2022, Online, 5–12 December 2022. [Google Scholar]
- Pierre-Olivier, N.; Paul, B.; Flavien, R.; Jean-François, O.; Mathieu, R. Third-generation naval IRST using the step-and-stare architecture. In Proceedings of the Infrared Technology and Applications 2008, Orlando, FL, USA, 16–20 March 2008. [Google Scholar]
- Lacy, G.C. Advanced Optics for IRST Sensor Having Afocal Foreoptics Positioned between a Scanning Coelostat Mirror and Focal Imaging Optics. U.S. Patent 9500518B2, 22 November 2016. [Google Scholar]
- Ding, X.Z.; Huang, J.Q.; Li, Z.; Yu, Y.; Li, F.M. Optic design of 6x continuous zoom scanning infrared system with array detector. J. Infrared Millim. Waves 2021, 40, 89–95. [Google Scholar]
- Fu, Q.; Zhang, X.; Zhang, J.; Shi, G.; Liu, M. Non-Rotationally Symmetric Field Mapping for Back-Scanned Step/Stare Imaging System. Appl. Sci. 2020, 10, 2399. [Google Scholar] [CrossRef]
- Synopsys. CODE V Optimization Reference Manual; Synopsys Inc.: Pasadena, CA, USA, 2017. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Spectral range | 3.7 μm~4.8 μm |
| Effective focal length | 60 mm~360 mm |
| F number | 4 |
| FPA array | 640 × 512 |
| Pitch size | 15 μm |
| Frame rates | 50 fps |
| Relative distortion | ≤5% |
| MTF | ≥0.4 (30 lp/mm at whole FOV) |
| Scan speed | 60°/s, 180°/s, 360°/s, |
| Back focal length | ≥28 mm |
| Size | ≤270 mm × 160 mm × 120 mm |
| Property | Tolerances |
|---|---|
| Radius | ±3 fringe |
| Center thickness | ±0.01 mm |
| Mounting tolerances | |
| Decentering | ±0.01 mm |
| Tilt | ±1′ |
| Integrating tolerances | |
| Decentering | ±0.02 mm |
| Tilt | ±1′ |
| Surface tolerances | |
| Decentering | ±0.01 mm |
| Tilt | ±1′ |
| Irregularity | ±0.3 fringe |
| Refractive index delta | ±0.0003 |
| Abbe number | ±0.8% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, R.; Zhang, H.; Yang, L.; Chen, W. Analysis and Design of Infrared Search and Track System with Afocal Zoom Telescope. Appl. Sci. 2023, 13, 13132. https://doi.org/10.3390/app132413132
Qu R, Zhang H, Yang L, Chen W. Analysis and Design of Infrared Search and Track System with Afocal Zoom Telescope. Applied Sciences. 2023; 13(24):13132. https://doi.org/10.3390/app132413132
Chicago/Turabian StyleQu, Rui, Hongwei Zhang, Lei Yang, and Weining Chen. 2023. "Analysis and Design of Infrared Search and Track System with Afocal Zoom Telescope" Applied Sciences 13, no. 24: 13132. https://doi.org/10.3390/app132413132