
Optimal Control for a Three-Rotor Unmanned Aerial Vehicle in Programmed Flights

Abstract
:1. Introduction
2. Control Object
2.1. Tricopter Characteristics
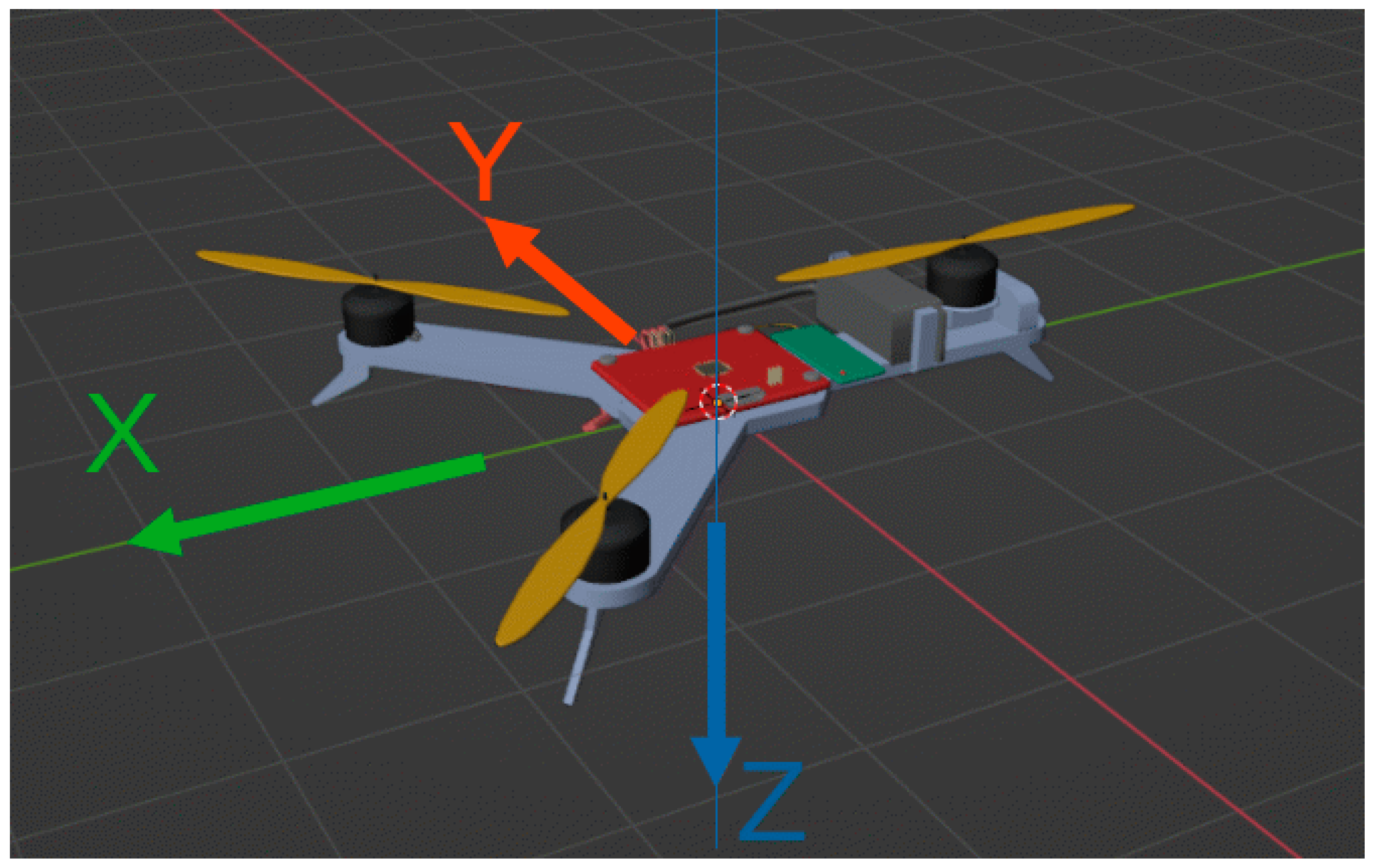
2.2. Physical Model
- τi—torque,
- fi—thrust force,
- kt—thrust coefficient,
- kd—torque coefficient,
- ωi—motor speed,
- i—motor numer {1, 2, 3}.
- Uz—thrust force,
- UΦ—rotation force around the X-axis,
- Uθ—rotation force around the Y-axis,
- Uψ—rotation force around the Z-axis,
- d1—distance between the center of the tricopter and the right or left motor, measured in the Y-axis,
- d2—distance between the center of the tricopter and the right or left motor, measured in the X-axis,
- d—distance between the center of the tricopter and the tail motor,
- α—angle of inclination of the tail motor.
2.3. Mathematical Model
- Jxx—moment of inertia about the X-axis,
- Jyy—moment of inertia about the Y-axis,
- Jzz—moment of inertia about the Z-axis.
- ΔUz—required control to keep the UAV hovering.
3. Control and Optimization
- J—calculated error,
- e(t)—error,
- t—time.
- Kpz, Kiz, Kdz—sought altitude PID controller gains,
- fmin—optimization function called as minimizing the IAE error,
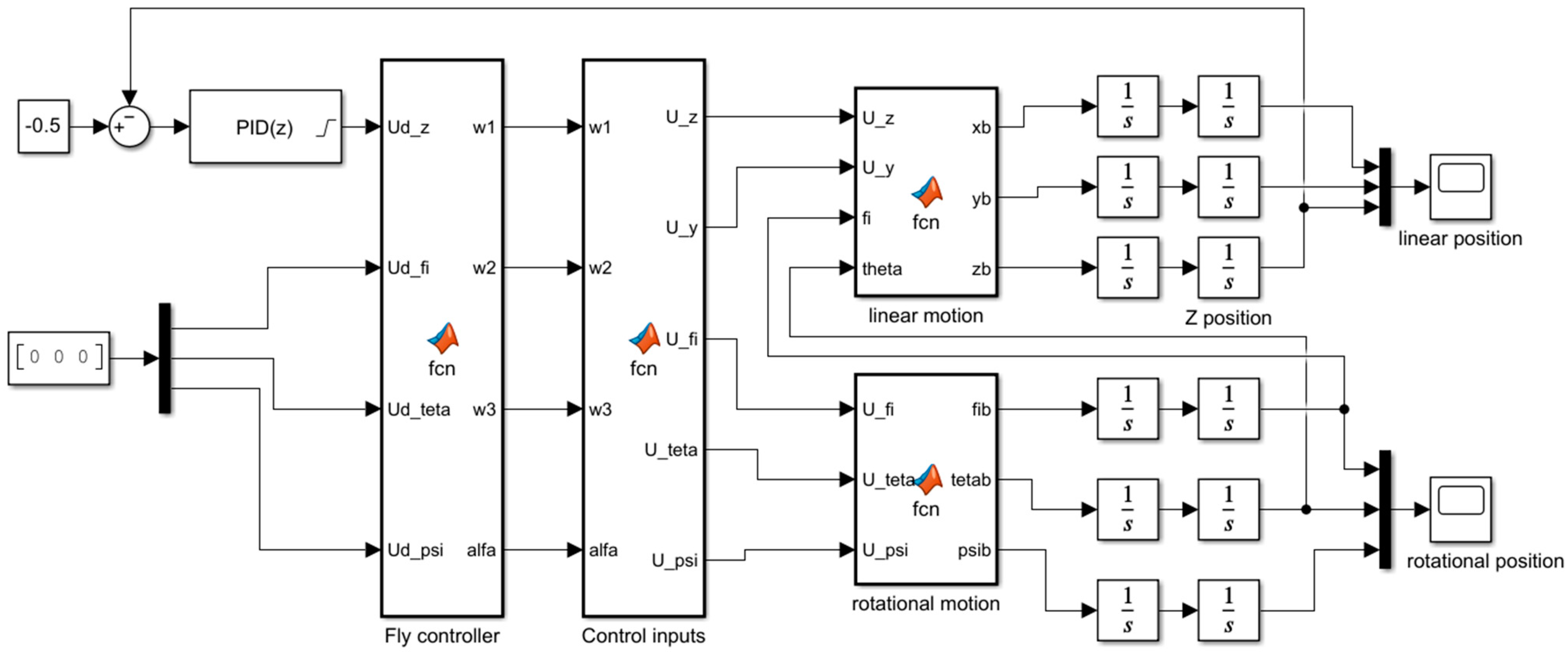
- tricopter dynamic function—modeled dynamics, graphically presented in Figure 4,
- starting parameters—initial gains selected using PID Tuner,
- options—simulation parameters, responsible for, among other things, the number of iterations.
4. Results
4.1. Simulation Parameters
4.2. Tricopter Hovering at Desired Height
4.2.1. Conditions of the Experiment
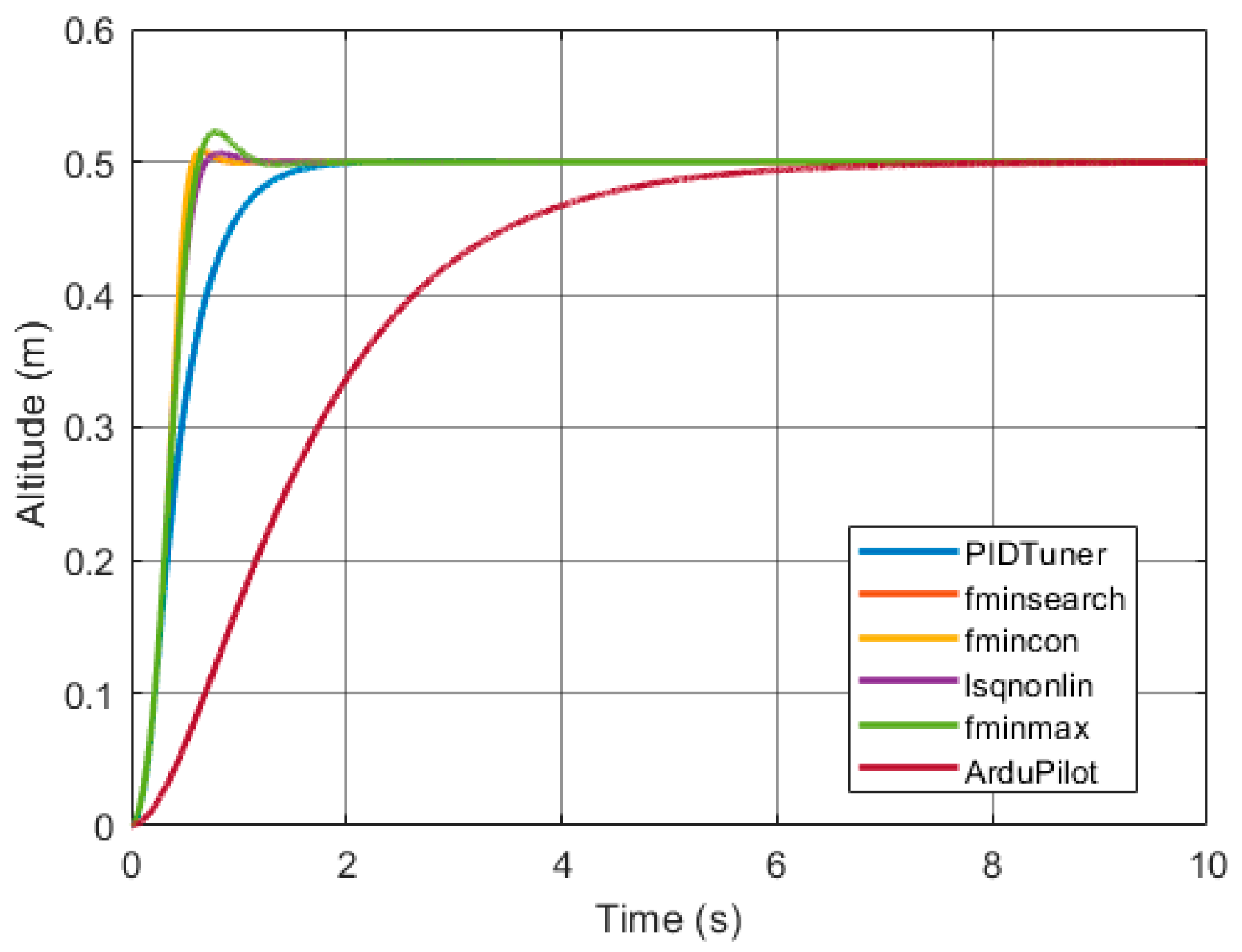
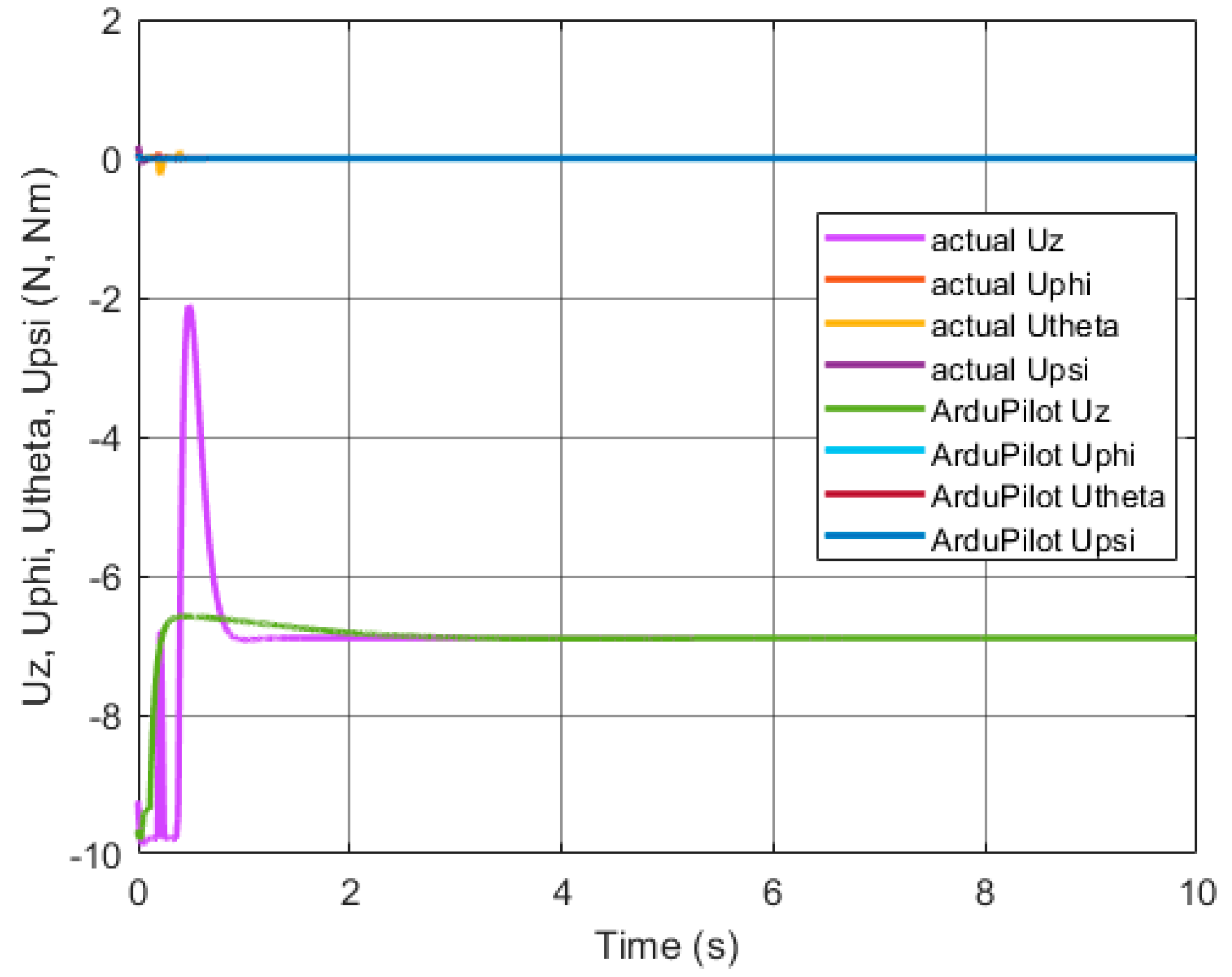
4.2.2. Simulation Studies and Summary of the Experiment
4.3. Height and Rotational Movement Regulator
4.3.1. Conditions of the Experiment
4.3.2. Simulation Studies and Summary of the Experiment
4.4. Spiral Flight
4.4.1. Desired Trajectory and Conditions of the Experiment
4.4.2. Simulation Studies and Summary of the Experiment
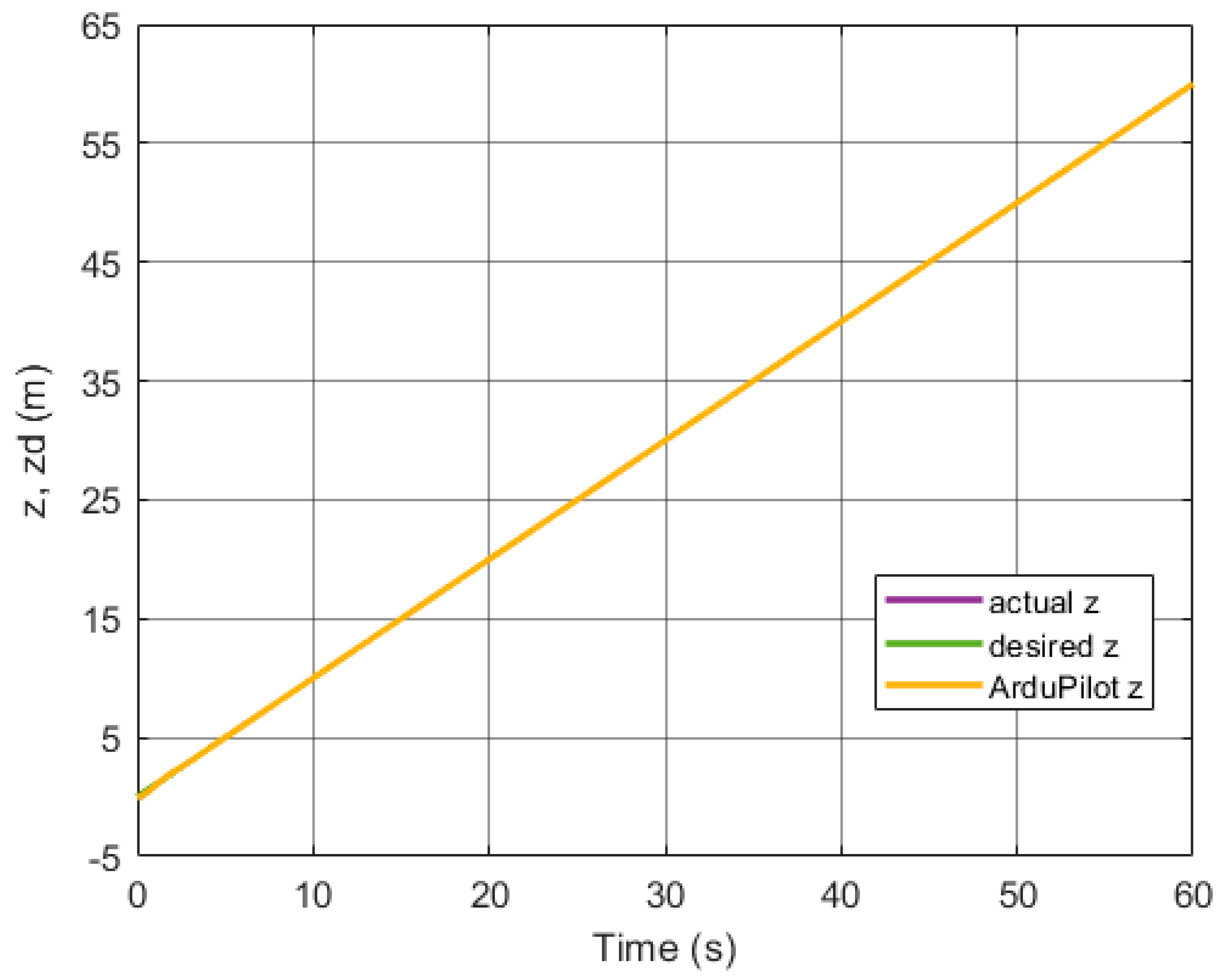
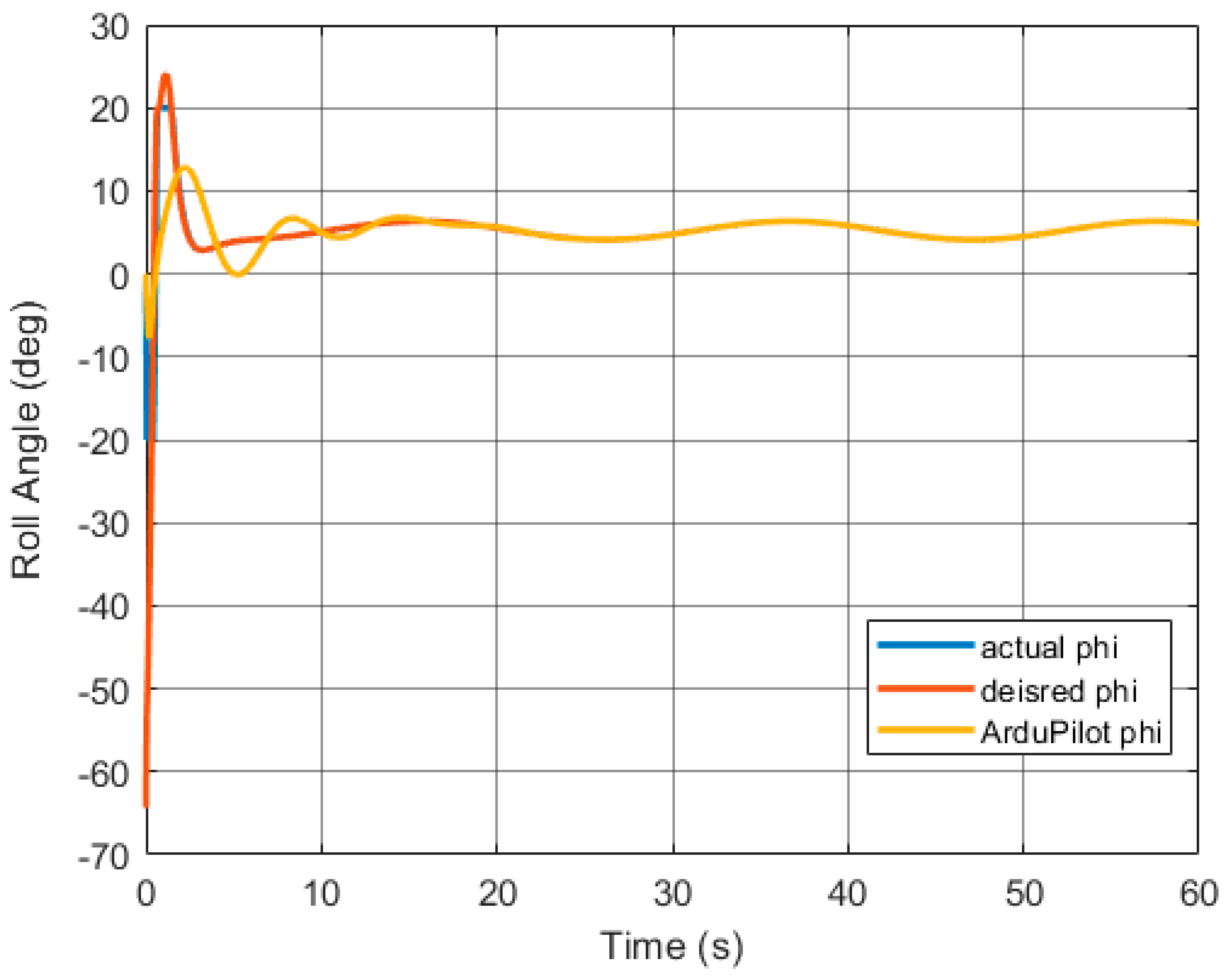
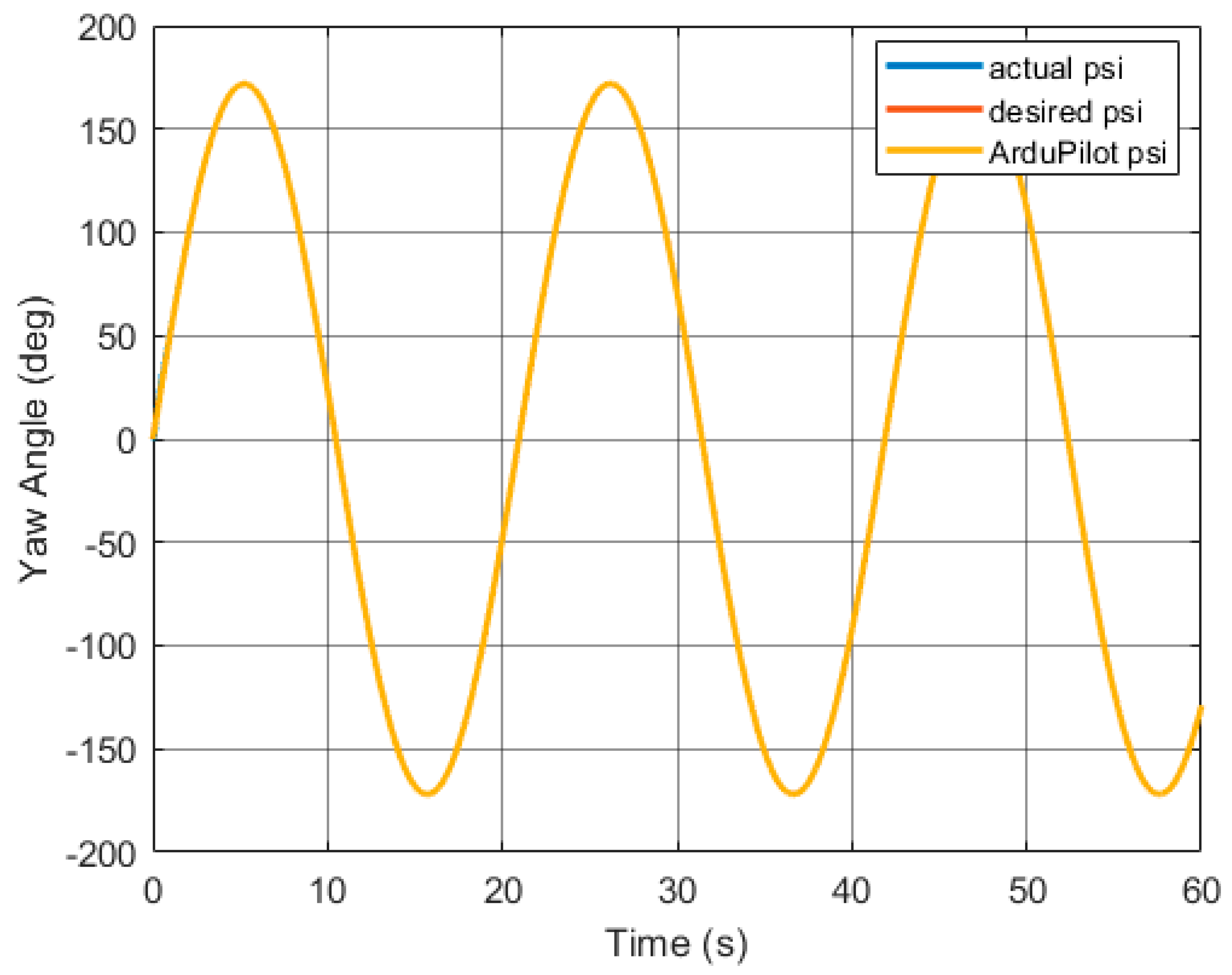
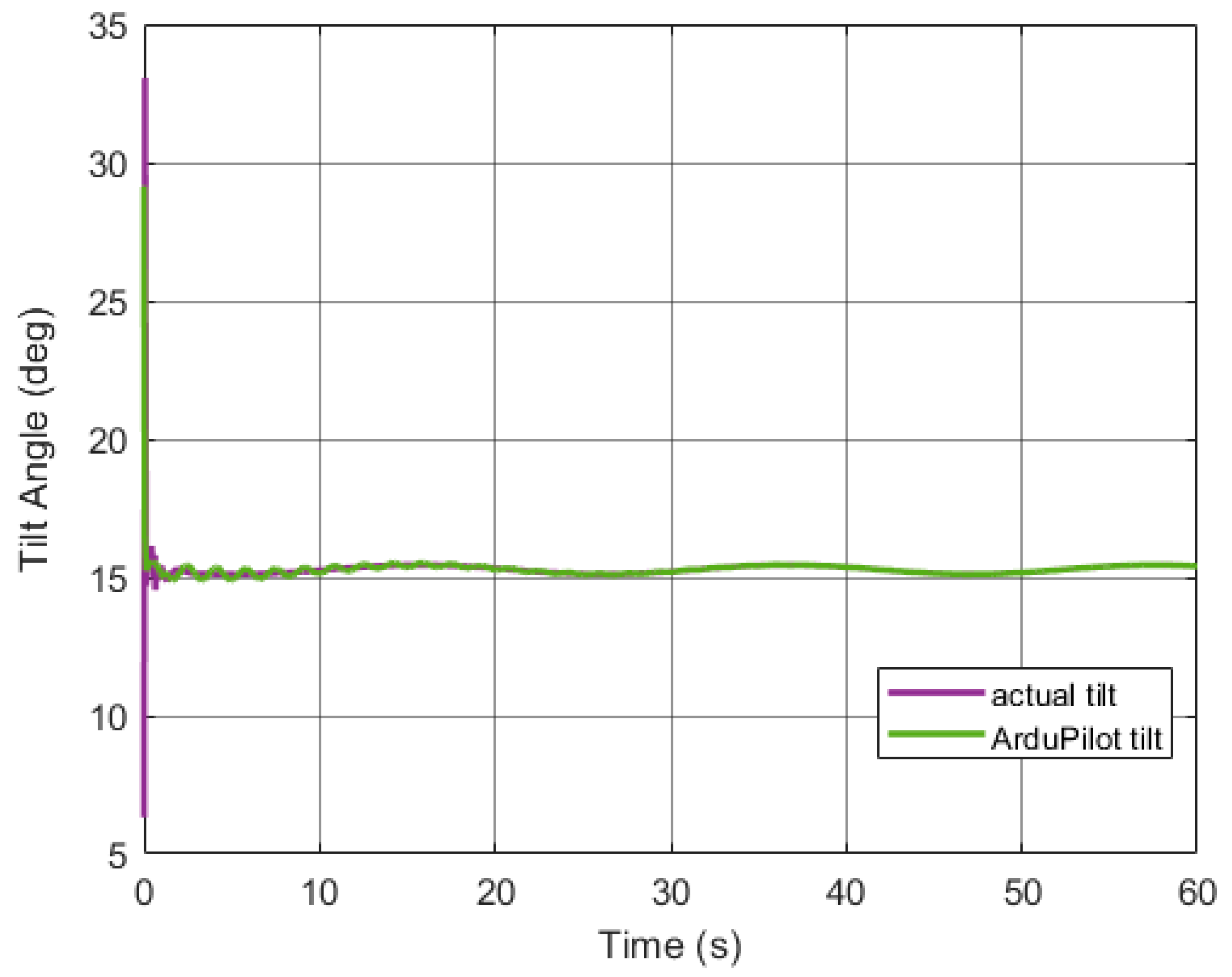
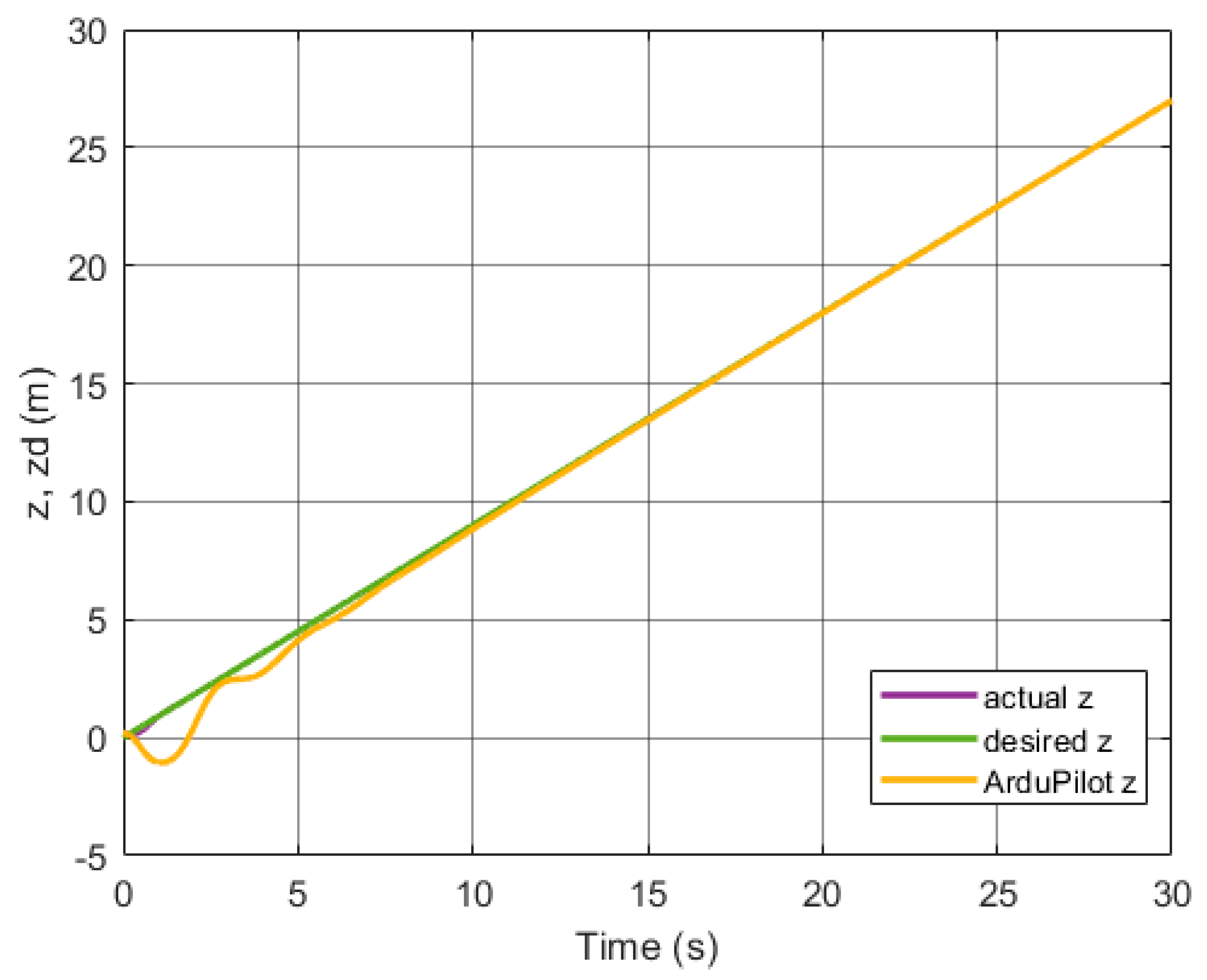
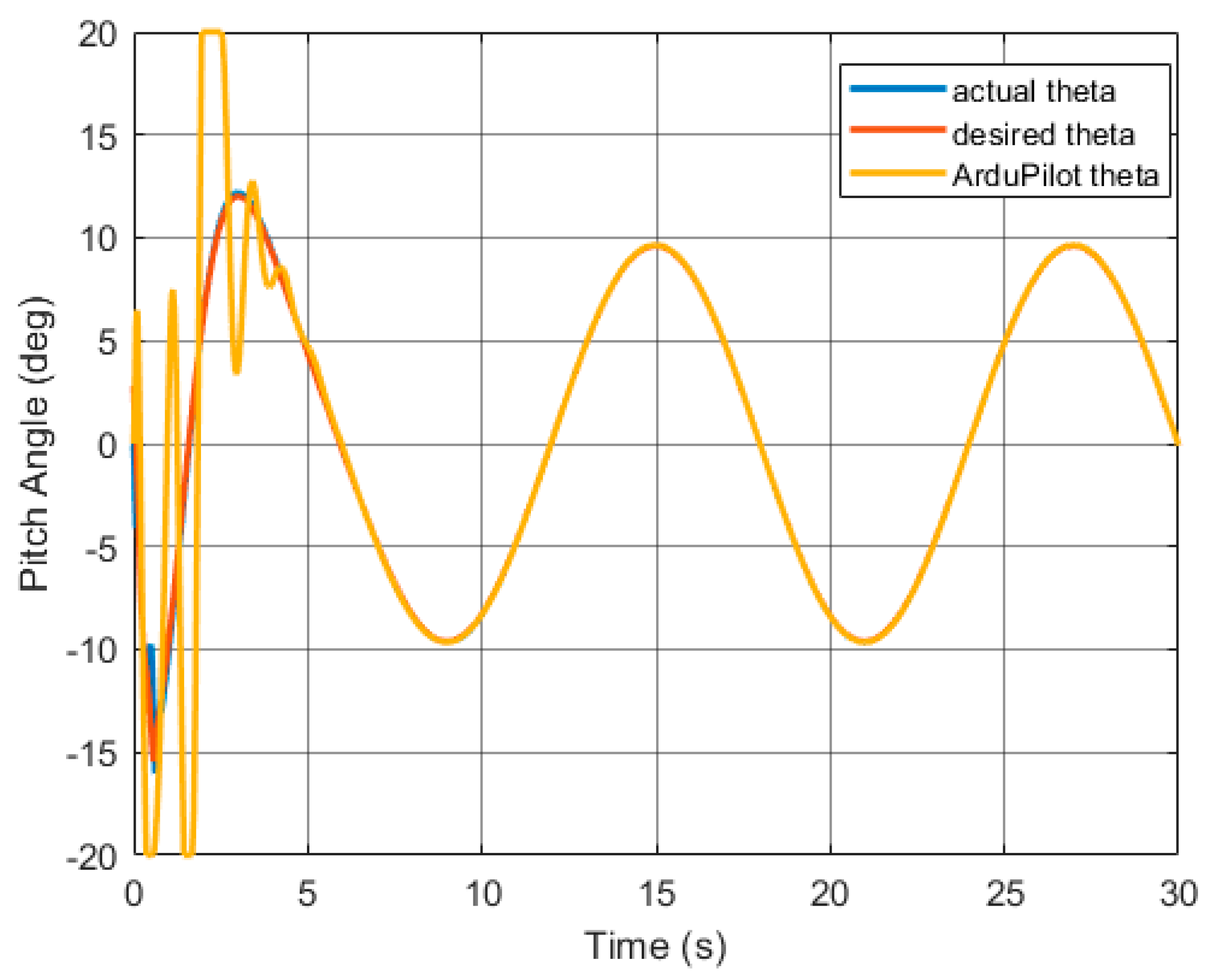
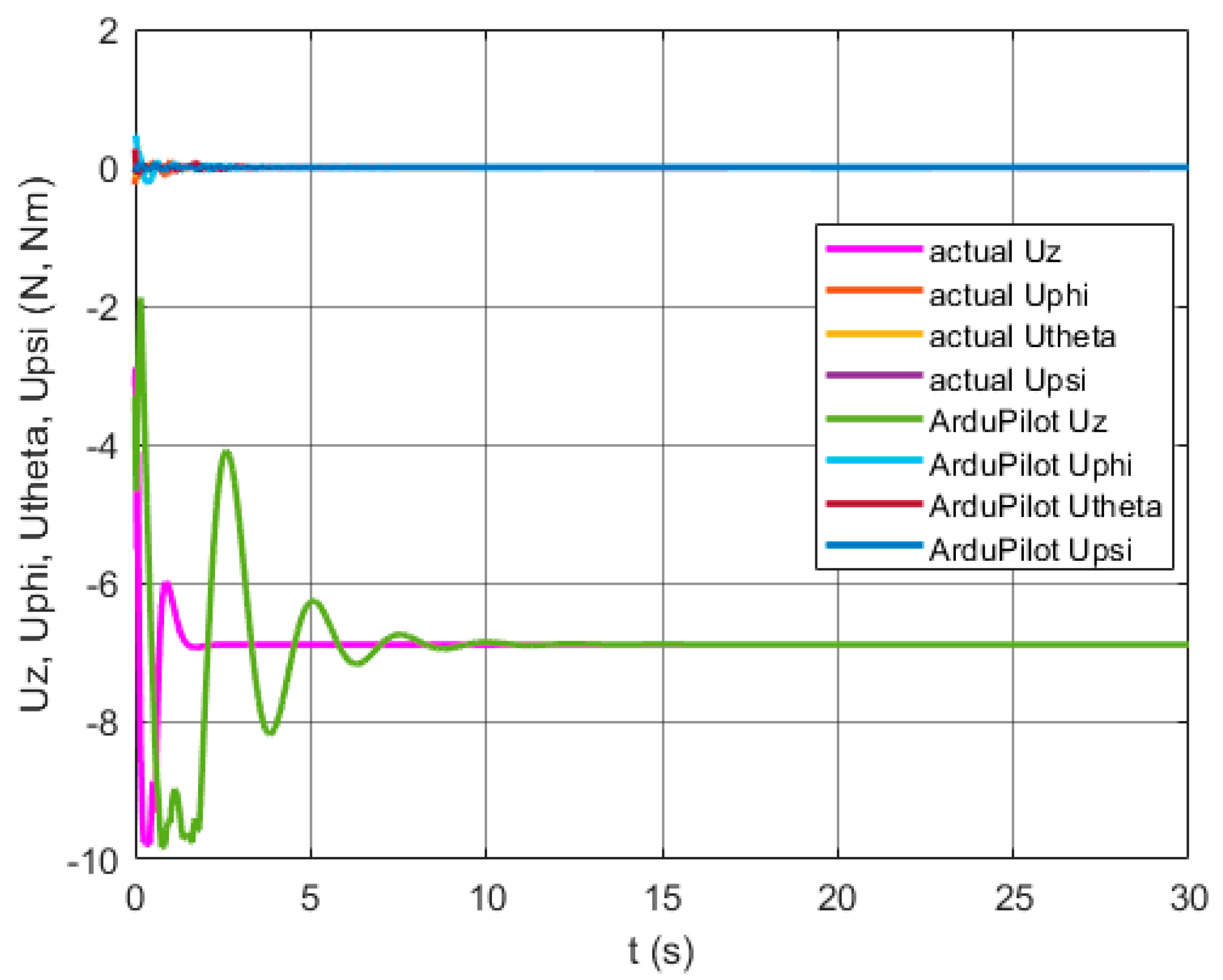
4.5. Vertical Patrol Flight
4.5.1. Desired Trajectory and Conditions of the Experiment
4.5.2. Simulation Studies and Summary of the Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sanz-Martos, S.; López-Franco, M.D.; Álvarez-García, C.; Granero-Moya, N.; López-Hens, J.M.; Cámara-Anguita, S.; Pancorbo-Hidalgo, P.L.; Comino-Sanz, I.M. Drone Applications for Emergency and Urgent Care: A Systematic Review. Prehospital Disaster Med. 2022, 37, 502–508. [Google Scholar] [CrossRef] [PubMed]
- Esch, P.V.; Leslie, C. Drones in Facilities Management: Disruptive Innovation to Reduce HSEQ High-Risk Activities. Facil. Perspect. Mag. 2016, 10. Available online: https://www.researchgate.net/publication/304134845_Drones_in_Facilities_Management_Disruptive_Innovation_to_Reduce_HSEQ_High-Risk_Activities (accessed on 17 March 2023).
- Eschmann, C.; Kuo, C.M.; Kuo, C.H.; Boller, C. Unmanned Aircraft Systems for Remote Building Inspection and Monitoring. In Proceedings of the 6th European Workshop on Structural Health Monitoring, Dresden, Germany, 3–6 July 2012; Available online: https://www.ndt.net/?id=14139 (accessed on 7 March 2023).
- Vacanas, Y.; Themistocleous, K.; Agapiou, A.; Hadjimitsis, D. Building Information Modelling (BIM) and Unmanned Aerial Vehicle (UAV) Technologies in Infrastructure Construction Project Management and Delay and Disruption Analysis. In Proceedings of the SPIE 9535—Third International Conference on Remote Sensing and Geoinformation of the Environment, 2015, Paphos, Cyprus, 16–19 March 2015. [Google Scholar] [CrossRef]
- Liang, H.; Lee, S.; Bae, W.; Kim, J.; Seo, S. Towards UAVs in Construction: Advancements, Challenges, and Future Directions for Monitoring and Inspection. Drones 2023, 7, 202. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Othman, N.Q.H.; Li, Y. Unmanned aerial vehicles (UAVs): Practical aspects, applications, open challenges, security issues, and future trends. Intel Serv Robot. 2023, 16, 109–137. [Google Scholar] [CrossRef] [PubMed]
- Cedro, L.; Wieczorkowski, K. Optimizing PID controller gains to model the performance of a quadcopter. Transp. Res. Procedia 2019, 40, 156–169. [Google Scholar] [CrossRef]
- Krzysztofik, I.; Koruba, Z. Analysis of Quadcopter Dynamics During Programmed Movement Under External Disturbance. In Nonlinear Dynamics and Control; Lacarbonara, W., Balachandran, B., Ma, J., Machado, J.A.H., Stepan, G., Eds.; Springer: Cham, Switzerland, 2020; pp. 177–185. [Google Scholar] [CrossRef]
- Abara, D.; Kannan, S.; Lanzon, A. Development and stabilization of a low-cost single-tilt tricopter. IFAC Pap. 2020, 53, 8897–8902. [Google Scholar] [CrossRef]
- Mahbobur, R.; Mohammad, M.; Assad-Uz-Zaman, M. Design and implementation of a Y-copter: Aerobatic version. AIP Conf. Proc. 2017, 1851, 020089. [Google Scholar] [CrossRef]
- Shafayat, H.H.; Ariyan, K.; Mazumder, P.; Ahmedullah, A.; Masudul, Q.; Islam, M.; Kanai, S. Design and Development of an Y4 Copter Control System. In Proceedings of the 14th International Conference on Computer Modelling and Simulation, Cambridge, UK, 28–30 March 2012. [Google Scholar] [CrossRef]
- Kastelan, D.; Konz, M.; Rudolph, J. Fully Actuated Tricopter with Pilot-Supporting Control. IFAC Pap. 2015, 48, 79–84. [Google Scholar] [CrossRef]
- Sababha, B.; Alzubi, H.; Rawashdeh, O. A rotor-tilt-free tricopter UAV: Design, modelling, and stability control. Int. J. Mechatron. Autom. 2016, 5, 107–113. [Google Scholar] [CrossRef]
- Abara, D. Modelling, Control and Construction of Tricopter Unmanned Aerial Vehicles. Ph.D. Thesis, The University of Manchester, Manchester, UK, 2022. [Google Scholar]
- Das, S.; Gouda, G.; Das, A. An Experimental Research on Design and Development of Tricopter. Int. J. Recent Technol. Eng. 2019, 8, 5119–5123. [Google Scholar] [CrossRef]
- Nam, K.J.; Joung, J.; Har, D. Tri-Copter UAV With Individually Tilted Main Wings for Flight Maneuvers. IEEE Access 2020, 8, 46753–46772. [Google Scholar] [CrossRef]
- ArduPilot Dev Team, Tricopter Configuration. 2023. Available online: https://ardupilot.org/copter/docs/tricopter.html (accessed on 11 March 2023).
- Paslier, P. Tricopter. Available online: https://sketchfab.com/3d-models/tricopter-ac47df697aee4834a2b3ff24c83eb180 (accessed on 17 March 2023).
- Prouty, R.W. Helicopter Performance, Stability and Control; Krieger Publishing Company: Malabar, FL, USA, 1995. [Google Scholar]
- Dydek, Z.; Annaswamy, A.; Lavretsky, E. Adaptive Control of Quadrotor UAVs: A Design Trade Study with Flight Evaluations. IEEE Trans. Control Syst. Technol. 2013, 21, 1400–1406. [Google Scholar] [CrossRef]
- MathWorks, Inc. pidTuner. Available online: https://www.mathworks.com/help/control/ref/pidtuner.html (accessed on 7 March 2023).
- MathWorks, Inc. Optimization Toolbox. 2023. Available online: https://www.mathworks.com/help/optim/ (accessed on 7 March 2023).
- Jaleeli, N.; VanSlyck, L.S. Nerc’s new control performance standards. IEEE Trans. Power Syst. 1999, 14, 1092–1099. [Google Scholar] [CrossRef]
- Seif-El-Islam, H.; Latifa, A. Decentralized PID Control by Using GA Optimization Applied to a Quadrotor. J. Autom. Mob. Robot. Intell. Syst. 2018, 12, 33–44. Available online: https://www.jamris.org/index.php/JAMRIS/article/view/460 (accessed on 17 March 2023).































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| d | 0.1625 m |
| d1 | |
| d2 | 0.5d |
| m | 0.703 kg |
| kt | 1.591 × 10−6 kg·m |
| kd | 2.354 × 10−8 kg·m2 |
| Jxx | 2.33 × 10−3 kg·m2 |
| Jyy | 2.71 × 10−3 kg·m2 |
| Jzz | 4.36 × 10−3 kg·m2 |
| ωmax | 1440 rad/s |
| Method of Selection | ArduPilot | Fminsearch | Fmincon | Lsqnonlin | Fminimax | PID Tuner |
|---|---|---|---|---|---|---|
| The selected coefficient Kp | 42 | 138.32 | 42.99 | 55.76 | 42.98 | 54.95 |
| The selected coefficient Ki | 3.5 | 41.58 | 41.31 | 41.61 | 41.29 | 48.22 |
| The selected coefficient Kd | 7 | 14.79 | 7.44 | 8.67 | 7.44 | 15.25 |
| IAE | 3.934 | 0.168 | 0.181 | 0.176 | 0.181 | 0.241 |
| Variable | Kp | Ki | Kd |
|---|---|---|---|
| Altitude | 102.16 | 38.61 | 14.38 |
| Roll | 7.75 | 0.03 | 0.33 |
| Pitch | 28.11 | 0.00 | 0.19 |
| Yaw | 61.73 | 0.00 | 1.31 |
| Variable | Kp | Ki | Kd |
|---|---|---|---|
| X | 6.98 | 4.73 | 3.45 |
| Y | 6.78 | 4.23 | 4.26 |
| Altitude | 80.47 | 59.28 | 10.76 |
| Roll | 7.41 | 0.00 | 0.26 |
| Pitch | 13.08 | 12.10 | 1.47 |
| Yaw | 3.07 | 0.00 | 0.66 |
| Variable | Kp | Ki | Kd |
|---|---|---|---|
| X | 11.82 | 14.55 | 7.38 |
| Y | 13.31 | 13.68 | 7.89 |
| Altitude | 49.24 | 104.84 | 9.33 |
| Roll | 2.27 | 0.01 | 0.03 |
| Pitch | 5.41 | 9.18 | 0.16 |
| Yaw | 13.08 | 10.47 | 0.41 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salwa, M.; Krzysztofik, I. Optimal Control for a Three-Rotor Unmanned Aerial Vehicle in Programmed Flights. Appl. Sci. 2023, 13, 13118. https://doi.org/10.3390/app132413118
Salwa M, Krzysztofik I. Optimal Control for a Three-Rotor Unmanned Aerial Vehicle in Programmed Flights. Applied Sciences. 2023; 13(24):13118. https://doi.org/10.3390/app132413118
Chicago/Turabian StyleSalwa, Maciej, and Izabela Krzysztofik. 2023. "Optimal Control for a Three-Rotor Unmanned Aerial Vehicle in Programmed Flights" Applied Sciences 13, no. 24: 13118. https://doi.org/10.3390/app132413118