
Multi-Physics and Multi-Objective Optimization for Fixing Cubic Fabry–Pérot Cavities Based on Data Learning

 and
and
Abstract
:1. Introduction
2. Multi-Physics Coupling Theory and Finite Element Method for FP Cavity
2.1. Multi-Physics Coupling Theory
2.2. Finite Element Method and Model Establishment
3. Results and Analysis of Multi-Physics Coupling
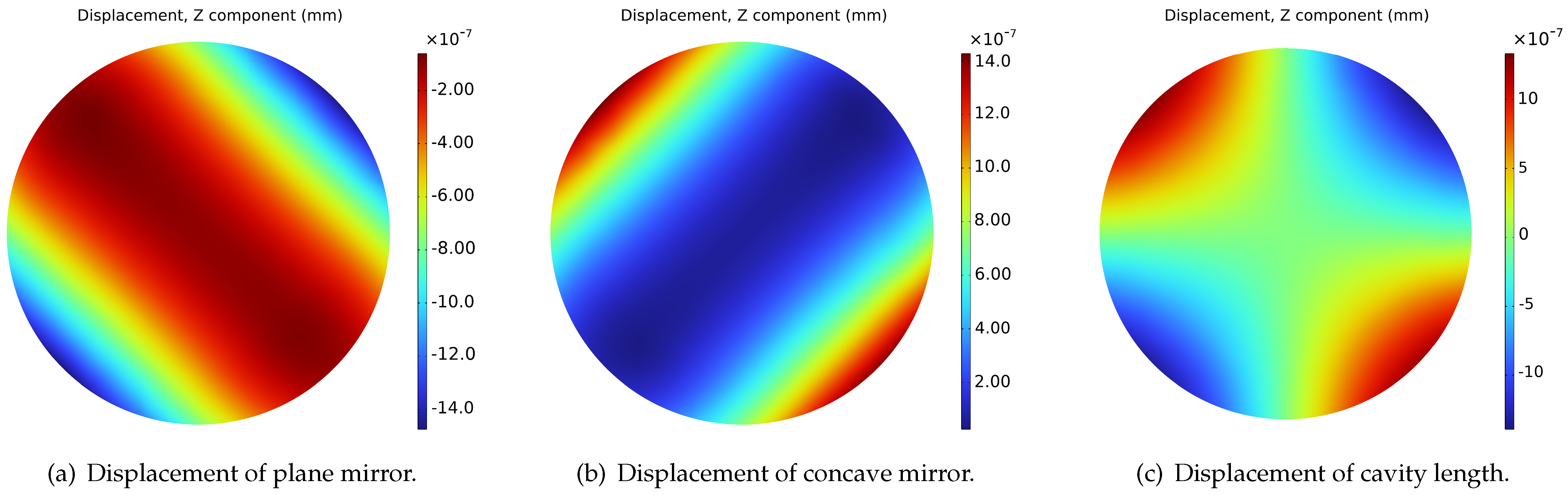
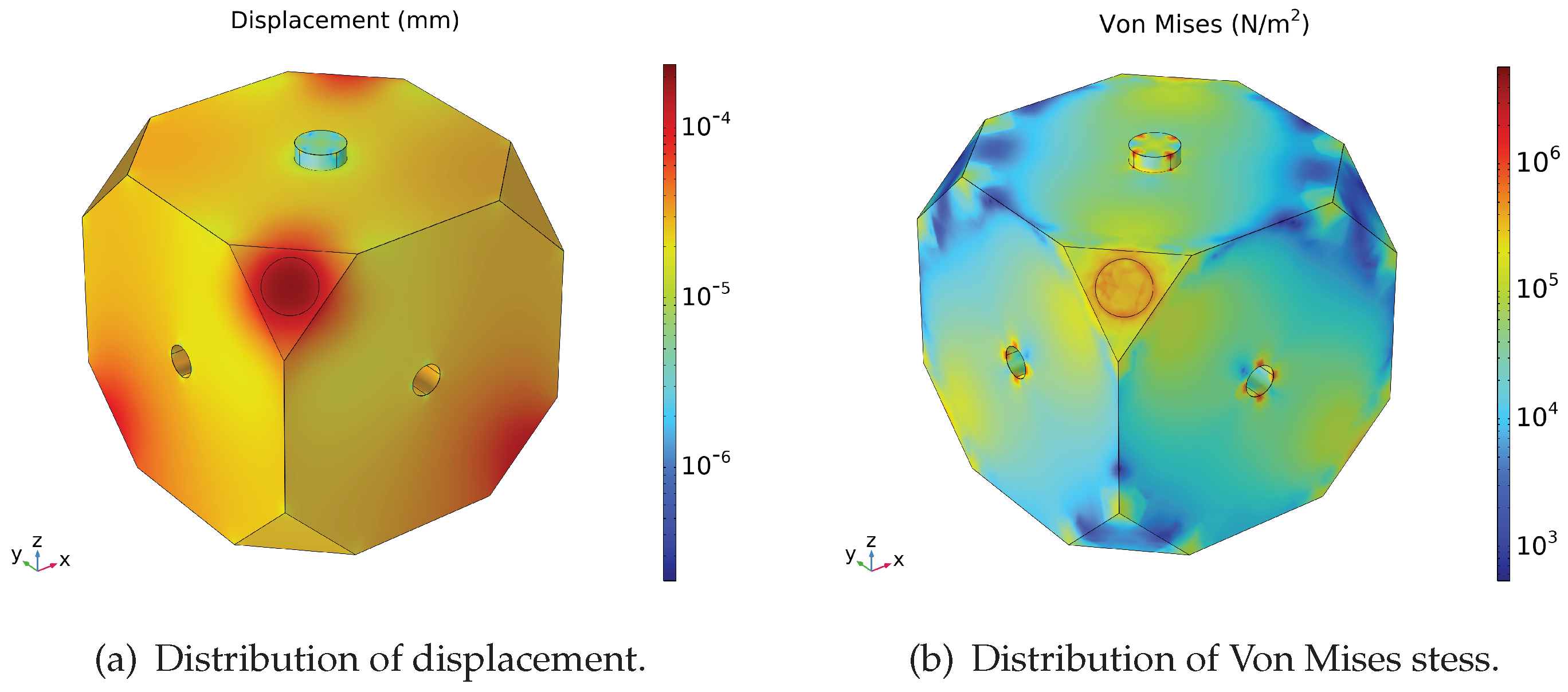
3.1. Displacement Distribution of FP Cavity under the Fixing Force
3.2. Analysis of Cavity Length Change under the Random Vibration Experiment
4. Mechanical Optimization for Fixing a Cubic FP Cavity
4.1. Determination of Design Spaces and Performance Indexes
4.2. Orthogonal Experiments: Design and Implementation
4.3. Establishment and Comparison of Data Learning Models
4.4. Evolutionary Algorithm Optimization and Performance Verification
5. Conclusions
- Performance indices acquired by multi-physics coupling simulation and key design variables determination: a multi-physics model for the cubic FP cavity is established and the performances under fixing force and random vibrations are obtained via finite element analysis, then the key performance indices (V, , ) and key design variables (d, l, F) are determined considering the features of the FP cavity.
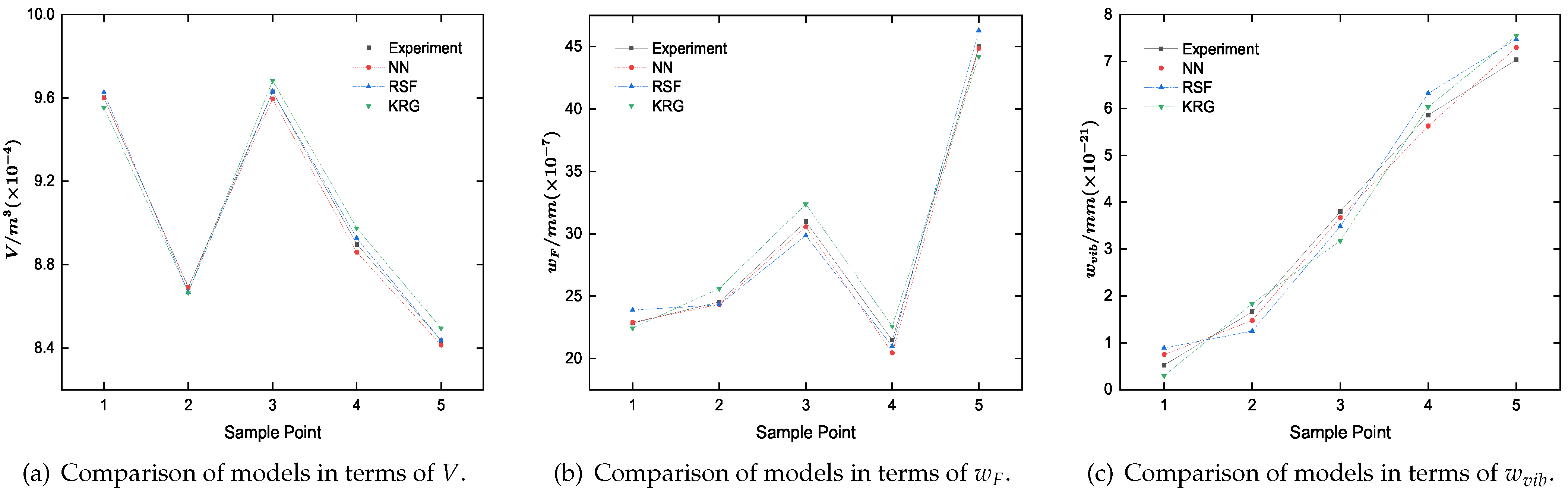
- Training data are obtained by orthogonal experiment and a fitting model is established based on a neural network: 49 sets of data obtained from the orthogonal experiment are used to establish and compare different data learning models (NN, RSF, KRG), with the results indicating that the neural network has the best performance.
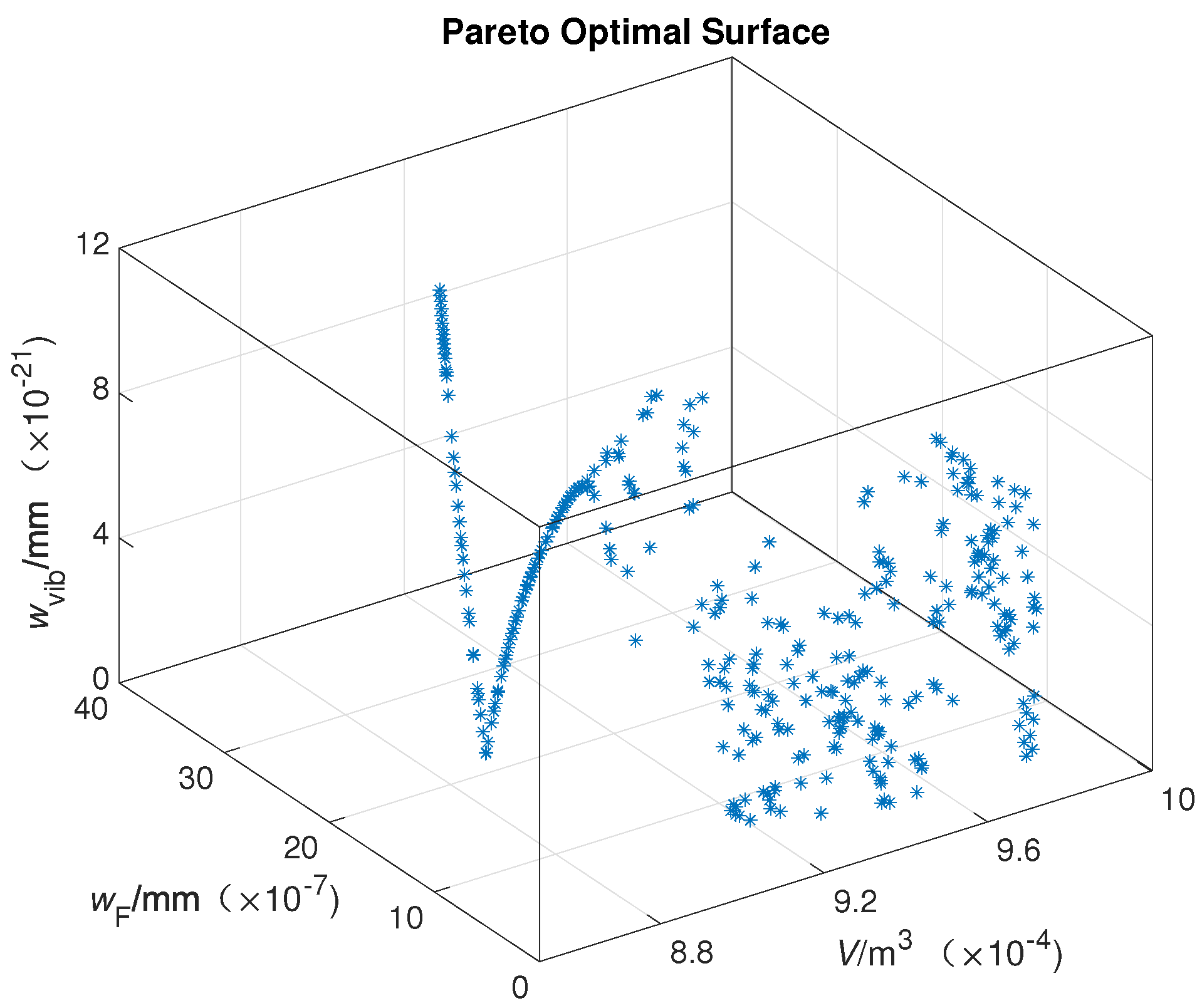
- Finally, an optimized combination of key design variables is obtained using an evolutionary algorithm: NSGA-II is adopted as the optimization algorithm, the Pareto-optimal front is obtained, and the optimal combination of design variables is finally determined as . The performance after optimization demonstrates a great improvement, with the displacement under the fixing force and vibration test both decreasing by more than 60%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Numata, K.; Anthony, W.Y.; Jiao, H.; Merritt, S.A.; Micalizzi, F.; Fahey, M.E.; Camp, J.B.; Krainak, M.A. Laser system development for the LISA (Laser Interferometer Space Antenna) mission. In Proceedings of the Solid State Lasers XXVIII: Technology and Devices, San Francisco, CA, USA, 2–7 February 2019; SPIE: Bellingham, WA, USA, 2019; Volume 10896, pp. 231–237. [Google Scholar]
- Luo, Z.; Guo, Z.; Jin, G.; Wu, Y.; Hu, W. A brief analysis to Taiji: Science and technology. Results Phys. 2020, 16, 102918. [Google Scholar] [CrossRef]
- Cao, S.; Liu, T.; Biesiada, M.; Liu, Y.; Guo, W.; Zhu, Z.H. DECi-hertz Interferometer Gravitational-wave Observatory: Forecast constraints on the cosmic curvature with LSST strong lenses. Astrophys. J. 2022, 926, 214. [Google Scholar] [CrossRef]
- Flechtner, F.; Morton, P.; Watkins, M.; Webb, F. Status of the GRACE follow-on mission. In Gravity, Geoid and Height Systems: Proceedings of the IAG Symposium GGHS2012, Venice, Italy, 9–12 October 2012; Springer: Cham, Switzerland, 2014; pp. 117–121. [Google Scholar]
- Acef, O.; Clairon, A.; Du Burck, F. ND:YAG laser frequency stabilized for space applications. In Proceedings of the International Conference on Space Optics—ICSO 2010, Toulouse, France, 30 March–2 April 2004; SPIE: Bellingham, WA, USA, 2019; Volume 10565, pp. 956–961. [Google Scholar]
- Willke, B.; Danzmann, K.; Frede, M.; King, P.; Kracht, D.; Kwee, P.; Puncken, O.; Savage, R.; Schulz, B.; Seifert, F.; et al. Stabilized lasers for advanced gravitational wave detectors. Class. Quantum Gravity 2008, 25, 114040. [Google Scholar] [CrossRef]
- Hinkley, N.; Sherman, J.A.; Phillips, N.B.; Schioppo, M.; Lemke, N.D.; Beloy, K.; Pizzocaro, M.; Oates, C.W.; Ludlow, A.D. An atomic clock with 10−18 instability. Science 2013, 341, 1215–1218. [Google Scholar] [CrossRef] [PubMed]
- Hagemann, C.; Grebing, C.; Lisdat, C.; Falke, S.; Legero, T.; Sterr, U.; Riehle, F.; Martin, M.J.; Ye, J. Ultrastable laser with average fractional frequency drift rate below 5× 10−19/s. Opt. Lett. 2014, 39, 5102–5105. [Google Scholar] [CrossRef] [PubMed]
- Ushijima, I.; Takamoto, M.; Das, M.; Ohkubo, T.; Katori, H. Cryogenic optical lattice clocks. Nat. Photonics 2015, 9, 185–189. [Google Scholar] [CrossRef]
- Lucia, U.; Grisolia, G. Time & clocks: A thermodynamic approach. Results Phys. 2020, 16, 102977. [Google Scholar]
- Black, E.D. An introduction to Pound–Drever–Hall laser frequency stabilization. Am. J. Phys. 2001, 69, 79–87. [Google Scholar] [CrossRef]
- Guo, X.; Zhang, L.; Liu, J.; Chen, L.; Fan, L.; Xu, G.; Liu, T.; Dong, R.; Zhang, S. An automatic frequency stabilized laser with hertz-level linewidth. Opt. Laser Technol. 2022, 145, 107498. [Google Scholar] [CrossRef]
- Chen, Q.F.; Nevsky, A.; Cardace, M.; Schiller, S.; Legero, T.; Häfner, S.; Uhde, A.; Sterr, U. A compact, robust, and transportable ultra-stable laser with a fractional frequency instability of 1×10−15. Rev. Sci. Instrum. 2014, 85, 113107. [Google Scholar] [CrossRef]
- Clivati, C.; Mura, A.; Calonico, D.; Levi, F.; Costanzo, G.A.; Calosso, C.E.; Godone, A. Planar-waveguide external cavity laser stabilization for an optical link with 10−19 frequency stability. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 2582–2587. [Google Scholar] [CrossRef]
- Leibrandt, D.R.; Thorpe, M.J.; Notcutt, M.; Drullinger, R.E.; Rosenband, T.; Bergquist, J.C. Spherical reference cavities for frequency stabilization of lasers in non-laboratory environments. Opt. Express 2011, 19, 3471–3482. [Google Scholar] [CrossRef]
- Argence, B.; Prevost, E.; Lévèque, T.; Le Goff, R.; Bize, S.; Lemonde, P.; Santarelli, G. Prototype of an ultra-stable optical cavity for space applications. Opt. Express 2012, 20, 25409–25420. [Google Scholar] [CrossRef]
- Pierce, R.; Stephens, M.; Kaptchen, P.; Leitch, J.; Bender, D.; Folkner, W.; Klipstein, W.; Shaddock, D.; Spero, R.; Thompson, R.; et al. Stabilized lasers for space applications: A high TRL optical cavity reference system. In Proceedings of the CLEO: Science and Innovations, San Jose, CA, USA, 6–11 May 2012; Optica Publishing Group: Washington, DC, USA, 2012; pp. 1–2. [Google Scholar]
- Chen, X.; Jiang, Y.; Li, B.; Yu, H.; Jiang, H.; Wang, T.; Yao, Y.; Ma, L. Laser frequency instability of 6×10−16 using 10-cm-long cavities on a cubic spacer. Chin. Opt. Lett. 2020, 18, 030201. [Google Scholar] [CrossRef]
- Solnyshkov, D.; Nalitov, A.; Teklu, B.; Franck, L.; Malpuech, G. Spin-dependent Klein tunneling in polariton graphene with photonic spin-orbit interaction. Phys. Rev. B 2016, 93, 085404. [Google Scholar] [CrossRef]
- Candeloro, A.; Razavian, S.; Piccolini, M.; Teklu, B.; Olivares, S.; Paris, M.G. Quantum probes for the characterization of nonlinear media. Entropy 2021, 23, 1353. [Google Scholar] [CrossRef] [PubMed]
- Lousteau, J.; Boetti, N.G.; Chiasera, A.; Ferrari, M.; Abrate, S.; Scarciglia, G.; Venturello, A.; Milanese, D. Er3+ and Ce3+ Codoped Tellurite Optical Fiber for Lasers and Amplifiers in the Near-Infrared Wavelength Region: Fabrication, Optical Characterization, and Prospects. IEEE Photonics J. 2012, 4, 194–204. [Google Scholar] [CrossRef]
- Boetti, N.G.; Pugliese, D.; Ceci-Ginistrelli, E.; Lousteau, J.; Janner, D.; Milanese, D. Highly doped phosphate glass fibers for compact lasers and amplifiers: A review. Appl. Sci. 2017, 7, 1295. [Google Scholar] [CrossRef]
- Mirza, J.; Ghafoor, S.; Kousar, A.; Kanwal, B.; Qureshi, K.K. Design of a continuous-wave ytterbium-doped tunable fiber laser pump for thulium-doped fiber amplifiers. Arab. J. Sci. Eng. 2022, 47, 3541–3549. [Google Scholar] [CrossRef]
- Mirza, J.; Ghafoor, S.; Atieh, A.; Kanwal, B.; Qureshi, K.K. Widely tunable and switchable multiwavelength erbium-doped fiber laser based on a single ring cavity. J. Opt. Soc. Am. B 2022, 39, 1118–1129. [Google Scholar] [CrossRef]
- Webster, S.; Gill, P. Force-insensitive optical cavity. Opt. Lett. 2011, 36, 3572–3574. [Google Scholar] [CrossRef] [PubMed]
- Jiao, D.; Xu, G.; Gao, J.; Deng, X.; Zang, Q.; Zhang, X.; Liu, T.; Dong, R. A portable sub Hertz ultra-stable laser over 1700 km highway transportation. arXiv 2022, arXiv:2203.11271. [Google Scholar]
- Zhao, P.; Deng, J.; Xing, C.; Meng, F.; Meng, L.; Xie, Y.; Chen, L.; Liu, T.; Bian, W.; Yin, X.; et al. A spaceborne mounting method for fixing a cubic Fabry–Pérot cavity in ultra-stable lasers. Appl. Sci. 2022, 12, 12763. [Google Scholar] [CrossRef]
- Wiens, E.; Schiller, S. Simulation of force-insensitive optical cavities in cubic spacers. Appl. Phys. B 2018, 124, 140. [Google Scholar] [CrossRef]
- Nowacki, W. Thermoelasticity; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Zimmerman, W. Introduction to COMSOL multiphysics. In Multiphysics Modeling with Finite Element Methods; World Scientific: Singapore, 2006; pp. 1–26. [Google Scholar]
- Reddy, J.N. Introduction to the Finite Element Method; McGraw-Hill Education: New York, NY, USA, 2019. [Google Scholar]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Antoni, J. The spectral kurtosis: A useful tool for characterising non-stationary signals. Mech. Syst. Signal Process. 2006, 20, 282–307. [Google Scholar] [CrossRef]
- Antoni, J. Fast computation of the kurtogram for the detection of transient faults. Mech. Syst. Signal Process. 2007, 21, 108–124. [Google Scholar] [CrossRef]
- Meng, L.; Zhao, P.; Meng, F.; Chen, L.; Xie, Y.; Wang, Y.; Bian, W.; Jia, J.; Liu, T.; Zhang, S.; et al. Design and fabrication of a compact, high-performance interference-filter-based external-cavity diode laser for use in the China Space Station. Chin. Opt. Lett. 2022, 20, 021407. [Google Scholar] [CrossRef]
- Shuiguang, T.; Hang, Z.; Huiqin, L.; Yue, Y.; Jinfu, L.; Feiyun, C. Multi-objective optimization of multistage centrifugal pump based on surrogate model. J. Fluids Eng. 2020, 142, 011101. [Google Scholar] [CrossRef]
- Sharma, S.; Sharma, S.; Athaiya, A. Activation functions in neural networks. Towards Data Sci. 2017, 6, 310–316. [Google Scholar] [CrossRef]
- Bartz-Beielstein, T.; Branke, J.; Mehnen, J.; Mersmann, O. Evolutionary algorithms. Wiley Interdiscip. Rev. Data Min. Knowl. Discov. 2014, 4, 178–195. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency Range/Hz | Power Spectral Density |
|---|---|
| 10~50 | 3 db/oct (rising slope) |
| 50~300 | 0.25 g/Hz (holding value) |
| 300~2000 | −12 db/oct (falling slope) |
| Number | d/mm | l/mm | F/N | V/m () | mm () | /mm () |
|---|---|---|---|---|---|---|
| 1 | 5 | 20 | 100 | 9.854 | 7.842 | 4.145 |
| 2 | 5 | 25 | 200 | 9.752 | 14.827 | 2.064 |
| 3 | 5 | 30 | 300 | 9.601 | 17.132 | 5.376 |
| 4 | 5 | 35 | 400 | 9.389 | 14.815 | 4.837 |
| 5 | 5 | 40 | 150 | 9.107 | 3.606 | 0.132 |
| 6 | 5 | 45 | 250 | 8.746 | 14.391 | 1.073 |
| 7 | 5 | 20 | 350 | 9.854 | 27.447 | 6.374 |
| 8 | 5 | 20 | 200 | 9.854 | 15.684 | 6.743 |
| 9 | 5 | 25 | 300 | 9.752 | 22.240 | 0.914 |
| 10 | 5 | 30 | 400 | 9.601 | 22.843 | 0.523 |
| 11 | 7 | 20 | 400 | 9.800 | 40.118 | 17.790 |
| 12 | 7 | 25 | 150 | 9.699 | 13.495 | 0.635 |
| 13 | 7 | 30 | 250 | 9.547 | 19.568 | 11.998 |
| 14 | 7 | 35 | 350 | 9.335 | 17.763 | 2.962 |
| 15 | 7 | 40 | 100 | 9.054 | 3.706 | 2.251 |
| 16 | 7 | 45 | 200 | 8.692 | 14.024 | 5.684 |
| 17 | 7 | 25 | 300 | 9.699 | 26.989 | 1.270 |
| 18 | 7 | 35 | 150 | 9.335 | 7.613 | 3.432 |
| 19 | 7 | 40 | 250 | 9.054 | 9.265 | 1.705 |
| 20 | 7 | 45 | 350 | 8.692 | 24.541 | 1.662 |
| 21 | 9 | 20 | 350 | 9.730 | 46.076 | 10.823 |
| 22 | 9 | 25 | 100 | 9.629 | 12.392 | 3.465 |
| 23 | 9 | 30 | 200 | 9.477 | 21.960 | 0.461 |
| 24 | 9 | 35 | 300 | 9.265 | 25.628 | 8.813 |
| 25 | 9 | 40 | 400 | 8.984 | 24.200 | 9.371 |
| 26 | 9 | 45 | 150 | 8.622 | 13.379 | 4.828 |
| 27 | 9 | 30 | 250 | 9.477 | 27.450 | 4.631 |
| 28 | 9 | 45 | 100 | 8.622 | 8.919 | 0.530 |
| 29 | 9 | 20 | 150 | 9.730 | 19.747 | 1.841 |
| 30 | 9 | 25 | 250 | 9.629 | 30.980 | 3.798 |
| 31 | 11 | 20 | 300 | 9.645 | 55.853 | 4.380 |
| 32 | 11 | 25 | 400 | 9.543 | 70.869 | 16.213 |
| 33 | 11 | 30 | 150 | 9.391 | 24.309 | 5.896 |
| 34 | 11 | 35 | 250 | 9.180 | 33.908 | 15.272 |
| 35 | 11 | 40 | 350 | 8.898 | 37.615 | 0.556 |
| 36 | 11 | 45 | 100 | 8.536 | 11.767 | 0.636 |
| 37 | 11 | 35 | 200 | 9.180 | 27.126 | 0.652 |
| 38 | 11 | 30 | 350 | 9.391 | 56.720 | 9.568 |
| 39 | 11 | 35 | 100 | 9.180 | 13.563 | 4.416 |
| 40 | 11 | 40 | 200 | 8.898 | 21.494 | 5.854 |
| 41 | 13 | 20 | 250 | 9.544 | 62.855 | 3.054 |
| 42 | 13 | 25 | 350 | 9.442 | 85.326 | 21.218 |
| 43 | 13 | 30 | 100 | 9.291 | 22.917 | 3.813 |
| 44 | 13 | 35 | 200 | 9.079 | 42.097 | 14.350 |
| 45 | 13 | 40 | 300 | 8.797 | 54.660 | 0.338 |
| 46 | 13 | 45 | 400 | 8.436 | 59.989 | 17.794 |
| 47 | 13 | 20 | 400 | 9.544 | 100.568 | 30.596 |
| 48 | 13 | 40 | 150 | 8.797 | 27.330 | 0.169 |
| 49 | 13 | 45 | 300 | 8.436 | 44.992 | 7.038 |
| Model | |||
|---|---|---|---|
| NN | 0.12 | 0.79 | 2.49 |
| RSF | 0.10 | 1.43 | 4.76 |
| KRG | 0.27 | 1.56 | 4.63 |
| d/mm | l/mm | F/N | V/m | mm | mm | |
|---|---|---|---|---|---|---|
| Before | 10 | 25 | 200 | 9.588 | 14.858 | 7.626 |
| After | 5 | 32 | 250 | 9.524 | 5.658 | 2.852 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, H.; Meng, F.; Wang, Z.; Yin, X.; Meng, L.; Jia, J. Multi-Physics and Multi-Objective Optimization for Fixing Cubic Fabry–Pérot Cavities Based on Data Learning. Appl. Sci. 2023, 13, 13115. https://doi.org/10.3390/app132413115
Zhao H, Meng F, Wang Z, Yin X, Meng L, Jia J. Multi-Physics and Multi-Objective Optimization for Fixing Cubic Fabry–Pérot Cavities Based on Data Learning. Applied Sciences. 2023; 13(24):13115. https://doi.org/10.3390/app132413115
Chicago/Turabian StyleZhao, Hang, Fanchao Meng, Zhongge Wang, Xiongfei Yin, Lingqiang Meng, and Jianjun Jia. 2023. "Multi-Physics and Multi-Objective Optimization for Fixing Cubic Fabry–Pérot Cavities Based on Data Learning" Applied Sciences 13, no. 24: 13115. https://doi.org/10.3390/app132413115