
Application and Research on Improved Adaptive Monte Carlo Localization Algorithm for Automatic Guided Vehicle Fusion with QR Code Navigation


Abstract
:1. Introduction
- (1)
- Improve the way of generating and resampling the initial particle swarm of the AMCL algorithm, so that the particle performance is more stable, and can effectively match the set template library to improve the positioning accuracy.
- (2)
- In the navigation process, even if the QR code is damaged and stained, it still does not affect the navigation and positioning. Hybrid navigation can complement each other and complete the navigation task independently.
- (3)
- The improved AMCL algorithm fuses QR code navigation. The two types of data are fused using EKF in order to improve the positioning accuracy and at the same time reduce the navigation time and improve the navigation efficiency.
- (4)
- The improved AMCL algorithm can effectively reduce or avoid the occurrence of particle abduction events and increase the reliability of accurate AGV positioning. The superiority of the improved algorithm can be effectively proved through field experiments.
2. Improved AMCL Algorithm
2.1. AGV Motion Modelling and Chassis Structure Analysis
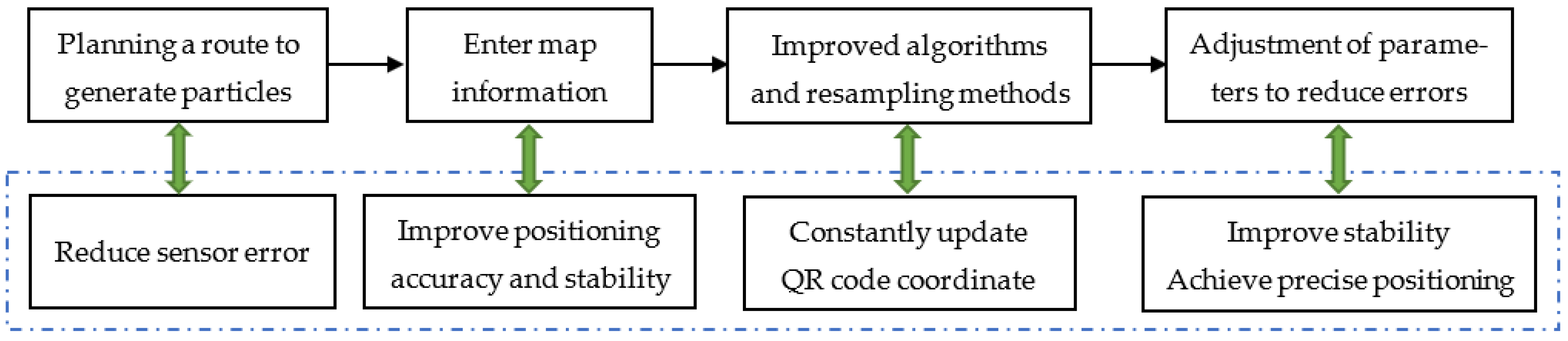
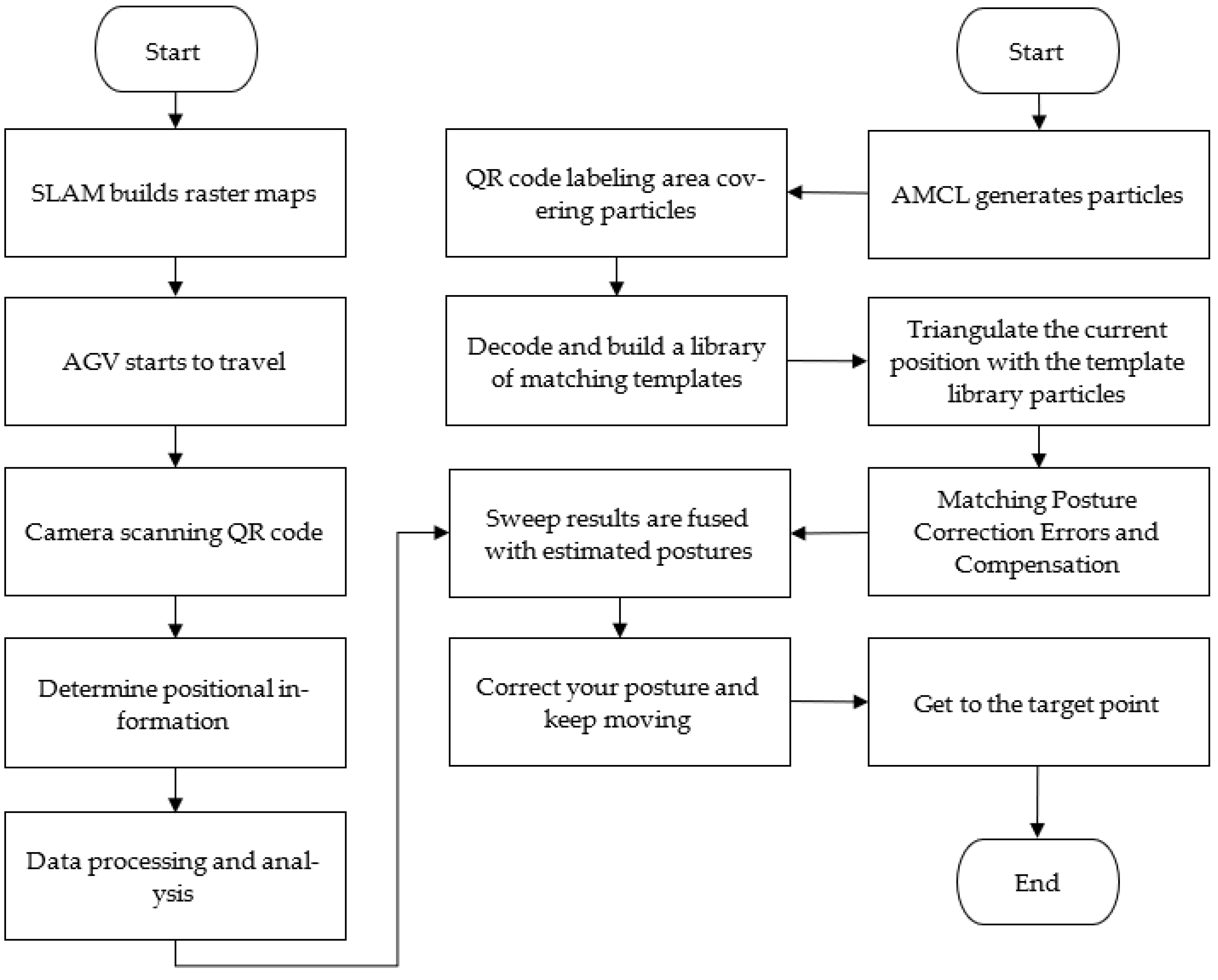
2.2. Improving the Flow of the Algorithm
2.3. Improved Odometer Motion Model Sampling
2.4. Improved Resampling to Avoid Kidnapping
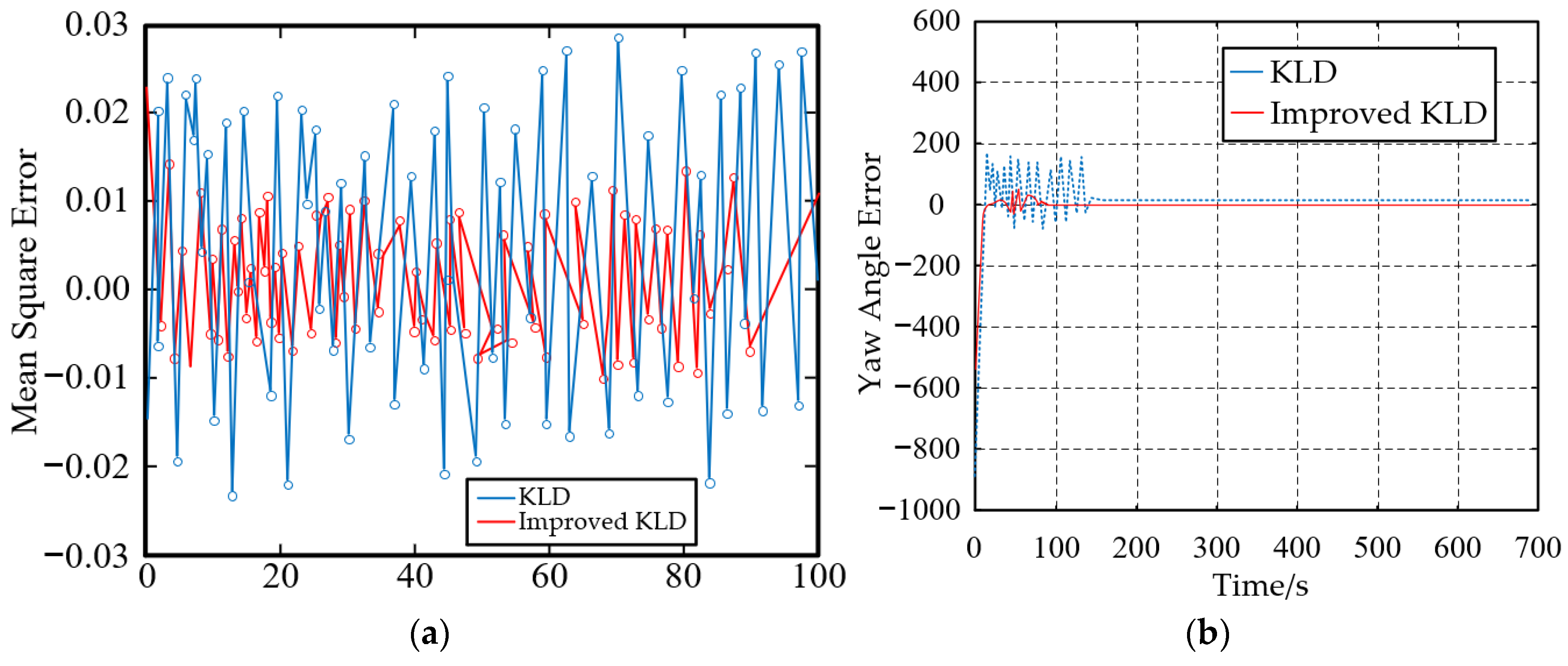
2.4.1. Adjustment of KLD Dynamic Resampling
- 1.
- Input the collection of particles after resampling at moment , the observation B, set and , the minimum value of the total number of particles , and the number of particles at moment .
- 2.
- Set the predicted particle set at time to , with a total number of particles of , a number of particles on the line , and variables and both being 0. Use the dynamic adjustment method to resample particle to obtain the predicted particle , and calculate the corresponding weight .
- 3.
- Accumulation of weights: , place the newly predicted particles into the set of predicted particles . If falls into the space interval , then , while the interval becomes non-empty.
- 4.
- If then , , followed by weight orthogonalization: , and finally return .
2.4.2. Simulation to Verify the Analysis of the Adjusted Dynamic Results
2.5. Improvement of AMCL Algorithm Initial Particle Swarm Generation
- 1.
- Random sampling from Gaussian distribution to generate initial particles.Use the global coordinate system as the reference coordinate system, use the initial positional attitude (default 0) as the mean value of the initial particle distribution, and obtain the covariance matrix of the positional attitude from the parameter server.
- 2.
- Prediction of particle orientation.When the odometer information is received, it is sampled from the odometer model to estimate the predicted position of the particle swarm.
- 3.
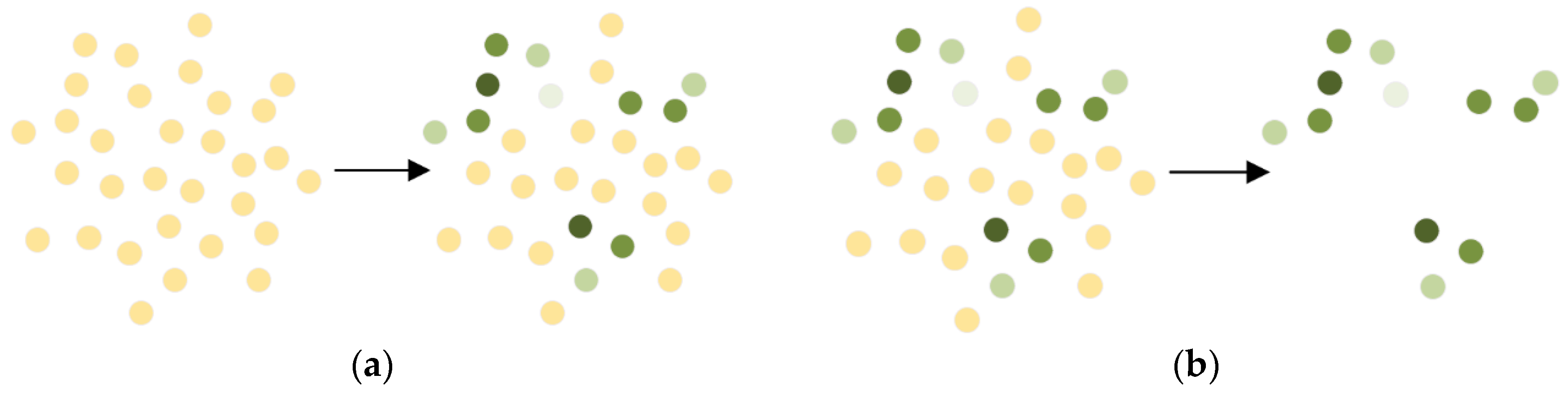
- Update particle position.When receiving the measurement data, the measurement data is put under the position of each particle, to judge the possibility of the measurement data occurring, and update the weights of the particles with this possibility. Put the laser measurement data into each particle position, and then calculate the distance between the endpoint of the laser measurement and the nearest obstacle on the map, the smaller the space is, the greater the likelihood of the laser measurement data occurring, and the greater the weight of the particle. The darker the color of the particle, the greater the weight.
- 4.
- Resample.If resampling, the program will judge the variance of the weights of the particle set; the larger the variance the smaller the effective particles and the more serious the particle degradation. In this case, it is necessary to carry out the resampling. After resampling, the number of particles will remain unchanged, particles with smaller weights will be filtered out, and particles with larger weights will be copied.
- 5.
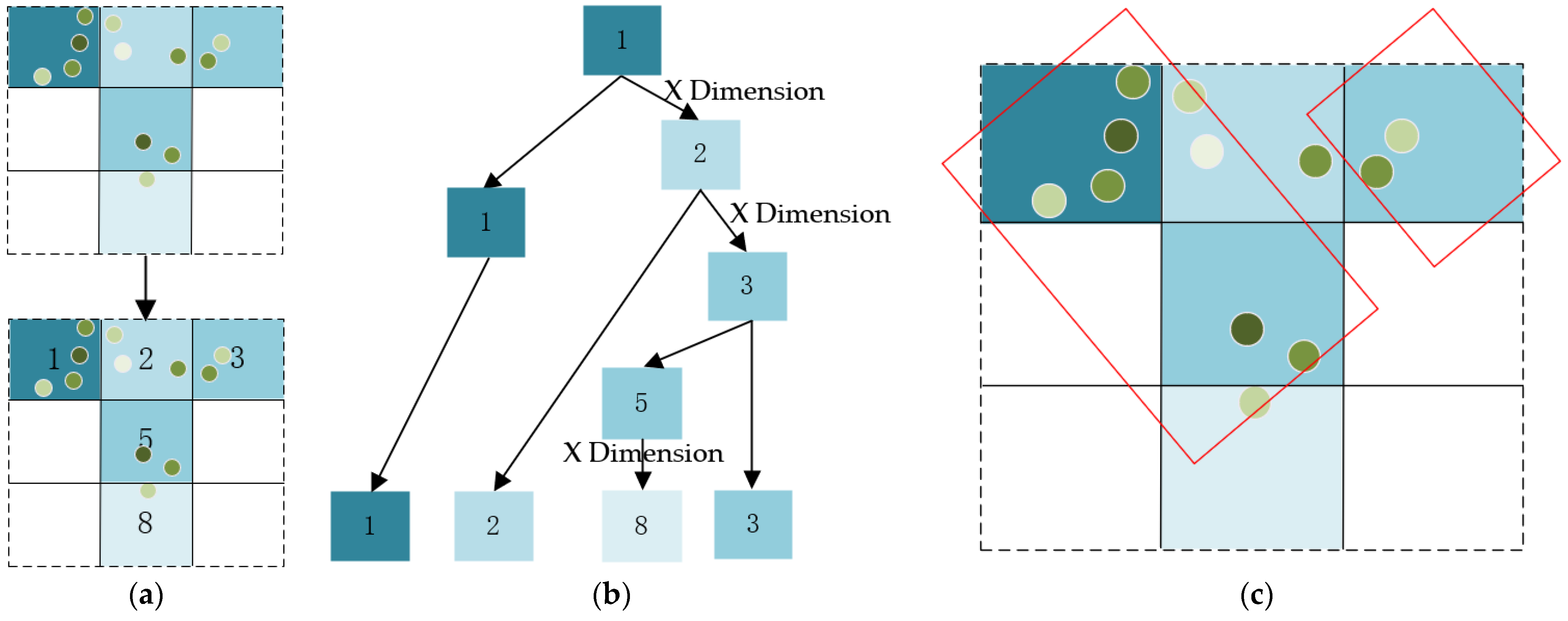
- Place the resampled particles into the histogram.The bit positions of the particles after resampling are put into the corresponding histogram. Maintain the data structure of the histogram with kd-tree, with the bit positions of the histogram as key and the weights of the particles as value. the more particles within the histogram, the darker the color of the histogram, which represents a more significant weight of that histogram.
- 6.
- Clustering statistics results.Recursively find if there are histograms containing particles at nine fixed distances around each histogram (here, the size of a histogram edge is used as the distance), and cluster them into one class if there are, and where it is clear that c1 is the highest-weighted class. Again, generate the variable particle swarm, find the particles in c1 and take the mean of their bit positions as the final result to publish.
2.6. Comparison of Performance Metrics of the Improved AMCL Algorithm
3. QR Code Navigation and Construction of a Template Matching Library
3.1. QR Code Navigation Process
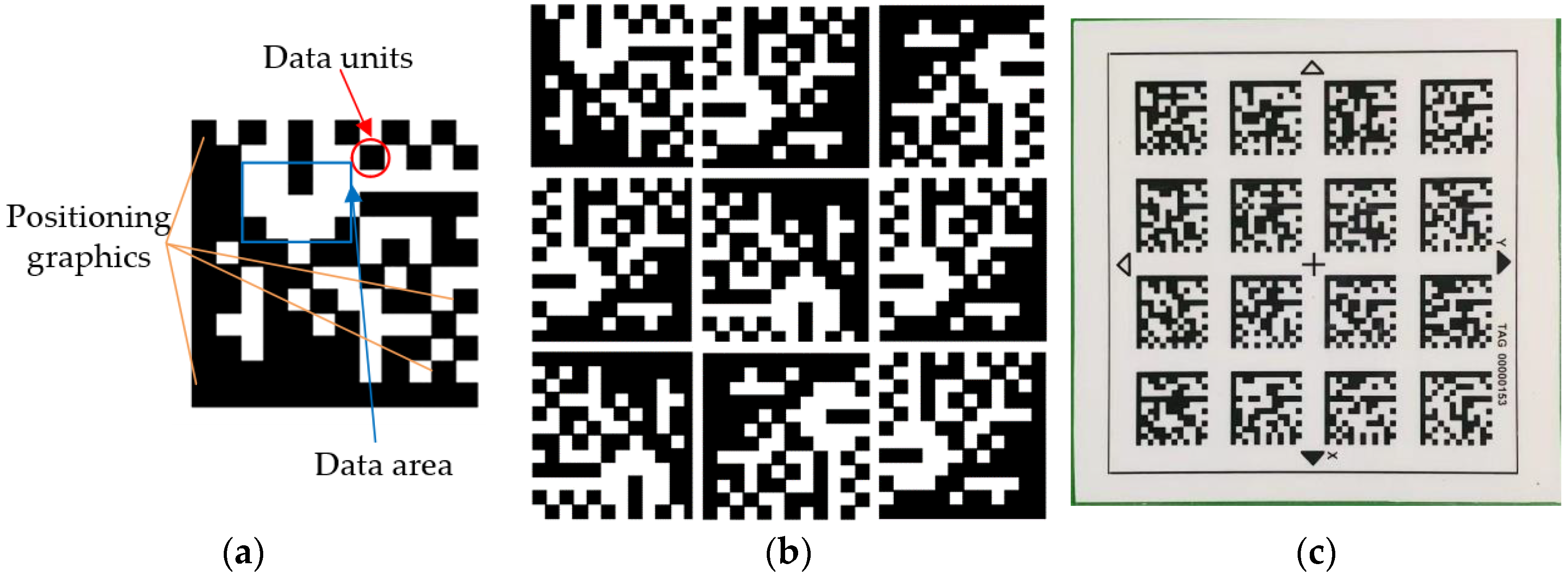
3.2. Construction of the Template Matching Library
3.3. Extended Kalman Filter Fusion Data
- 1.
- Prediction steps.
- 2.
- Update steps.
- 3.
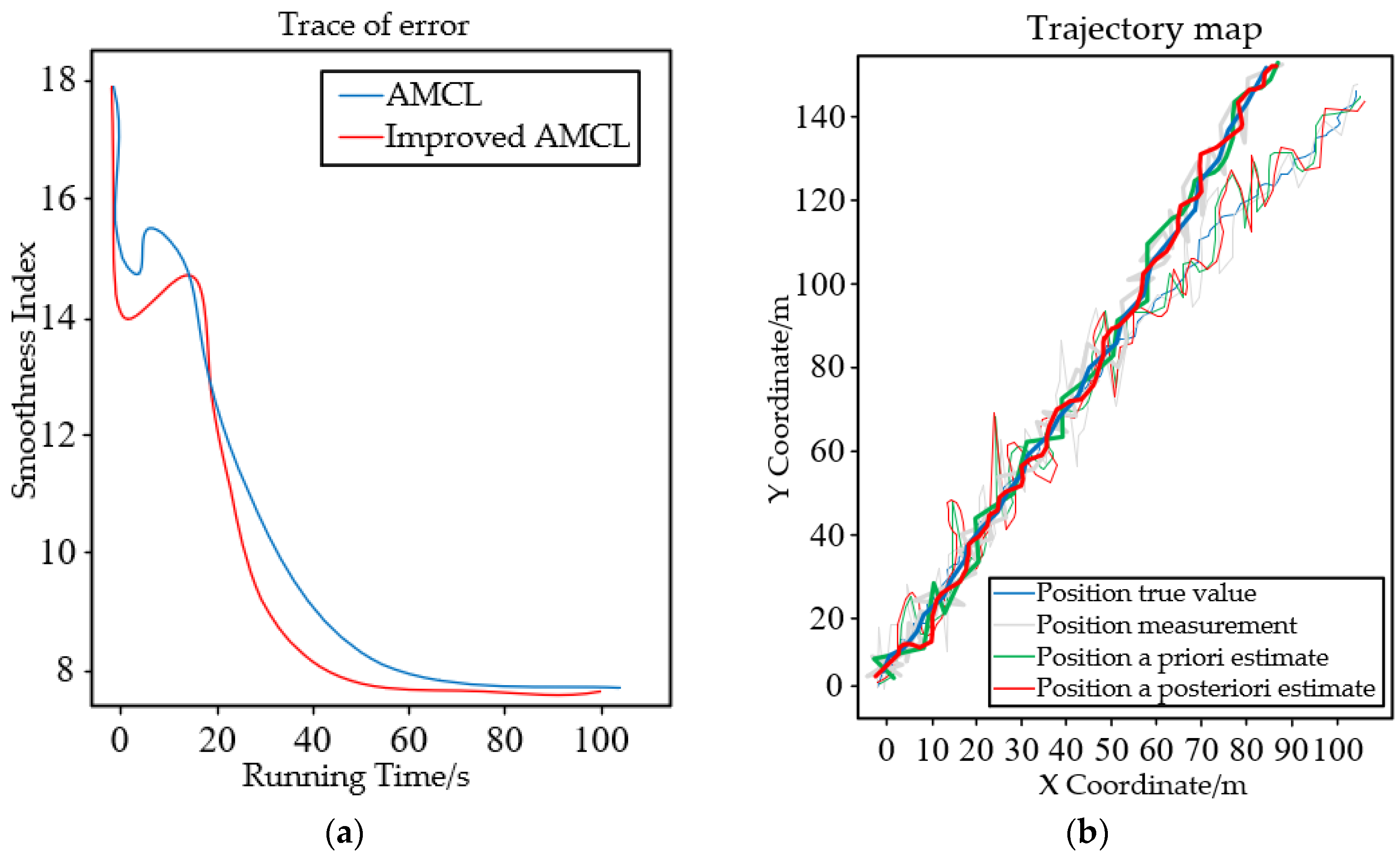
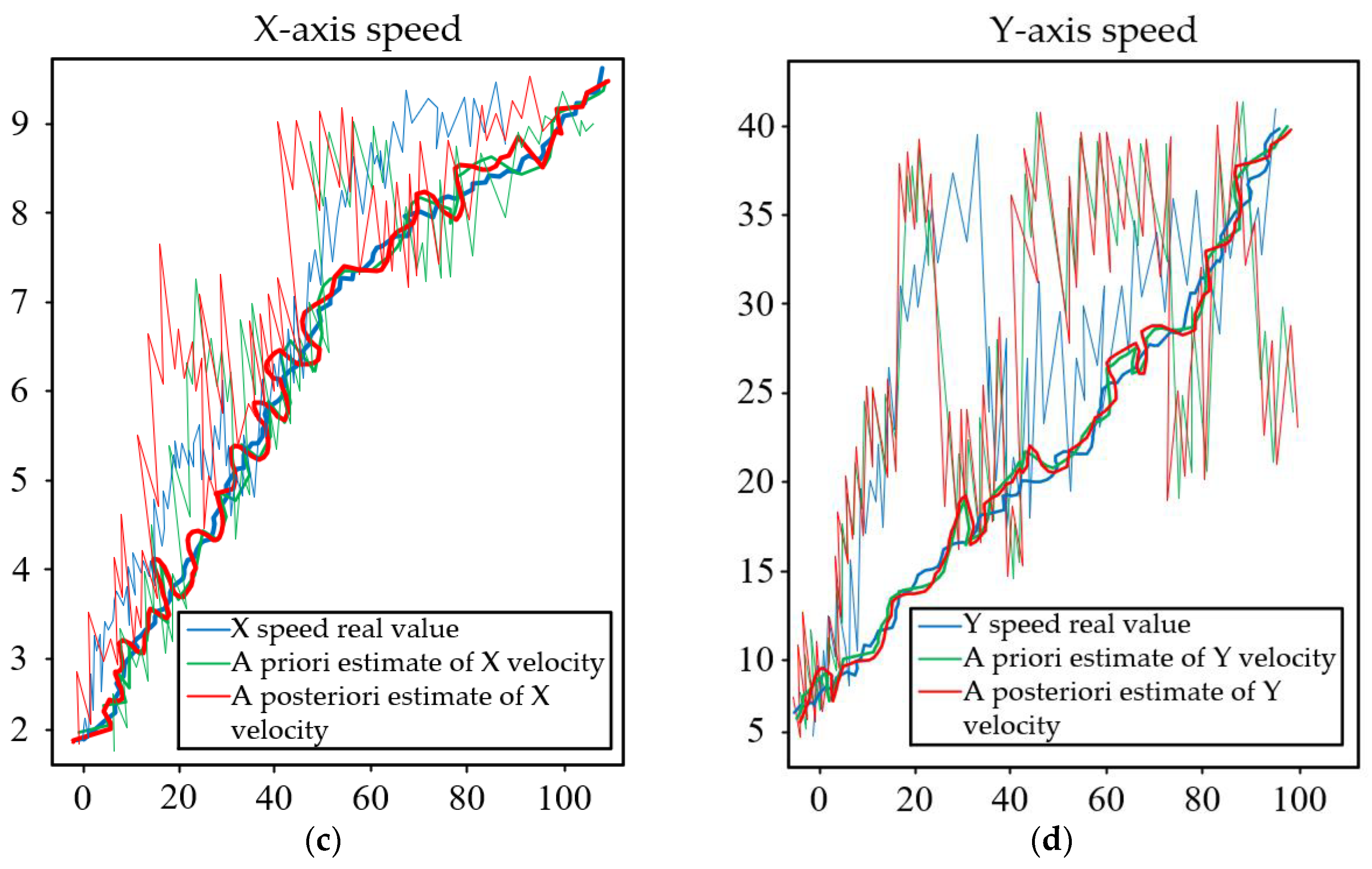
- Simulation result diagram.
4. Experimental Validation
4.1. Improved AMCL Algorithm Simulation Comparison Experiment
4.2. Real Scene Experimental Test
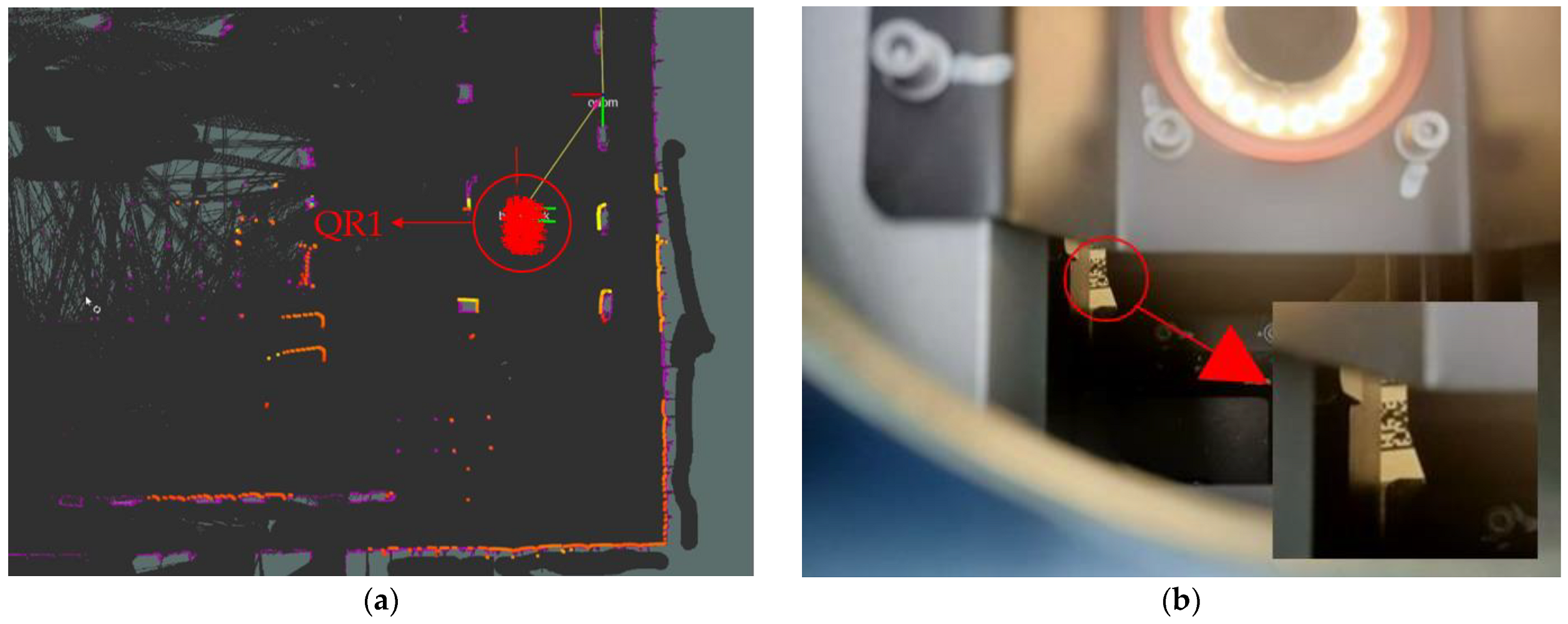
4.2.1. Improved AMCL Matching Template Library Accuracy Test
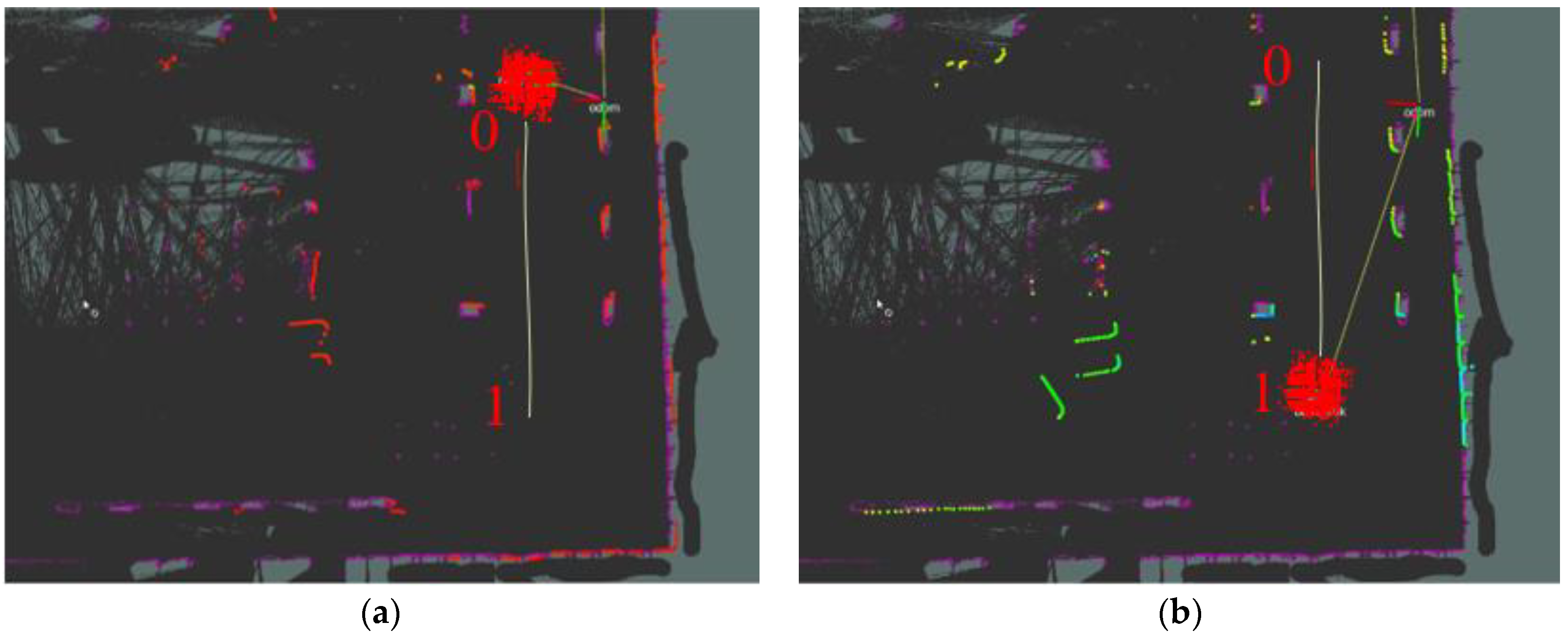
4.2.2. AGV Particle Kidnapping Experiment
4.3. Discussion
5. Conclusions
- 1
- This article provides an in-depth analysis and research on the development status of AGV’s critical domestic and international technologies and researches robot navigation, positioning, and path planning technology. The advantages and disadvantages of various methods are compared, and the overall navigation scheme and system navigation method are designed in detail. Finally, the feasibility and benefits of this choice are verified through experiments.
- 2
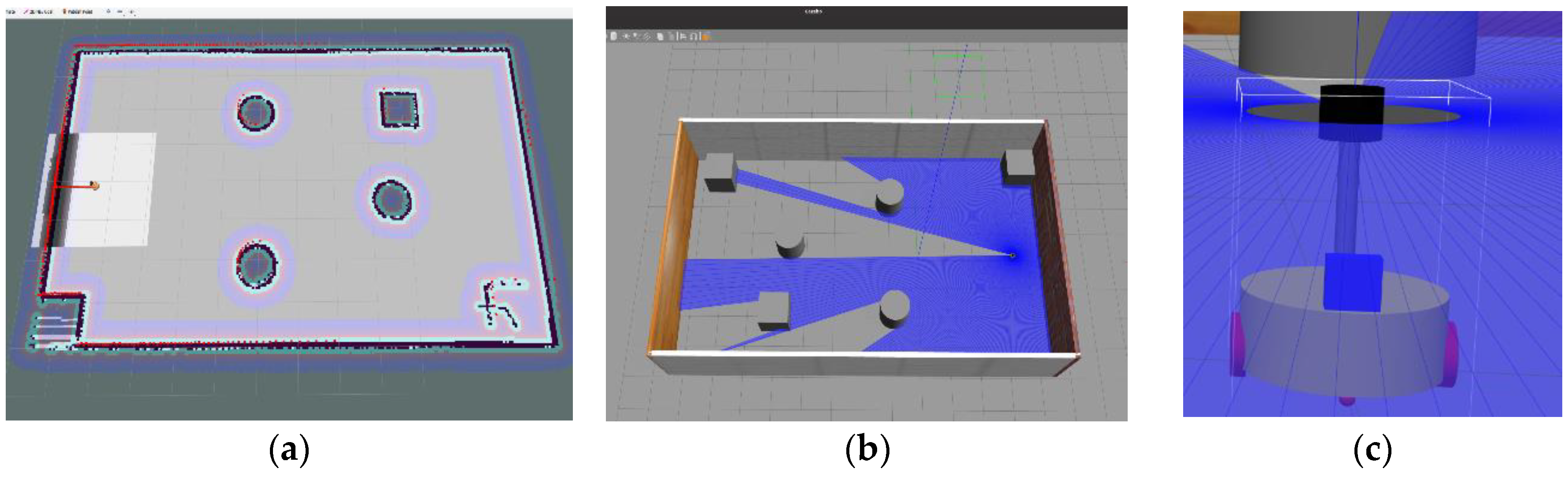
- An ROS operating system was used to build the simulation environment of the AGV, and the real positioning system platform was established to prepare for the research of the AGV positioning system. The localization system proposed in this paper uses SLAM global mapping to obtain the absolute coordinates of ground punctuation. It uses the improved AMCL algorithm to combine QR codes, which improves the positioning time and accuracy in the navigation process.
- 3
- Improving the generation of the initial particle swarm can improve the convergence speed and accuracy of the algorithm, and improve the resampling method to effectively reduce or avoid the kidnapping problem. By building the simulation model and testing the simulation using MATLAB software, the algorithm can be made to converge faster and more accurately to the AGV position, as well as improving the real-time and responsiveness of the system, and greatly reducing the time required for navigation.
- 4
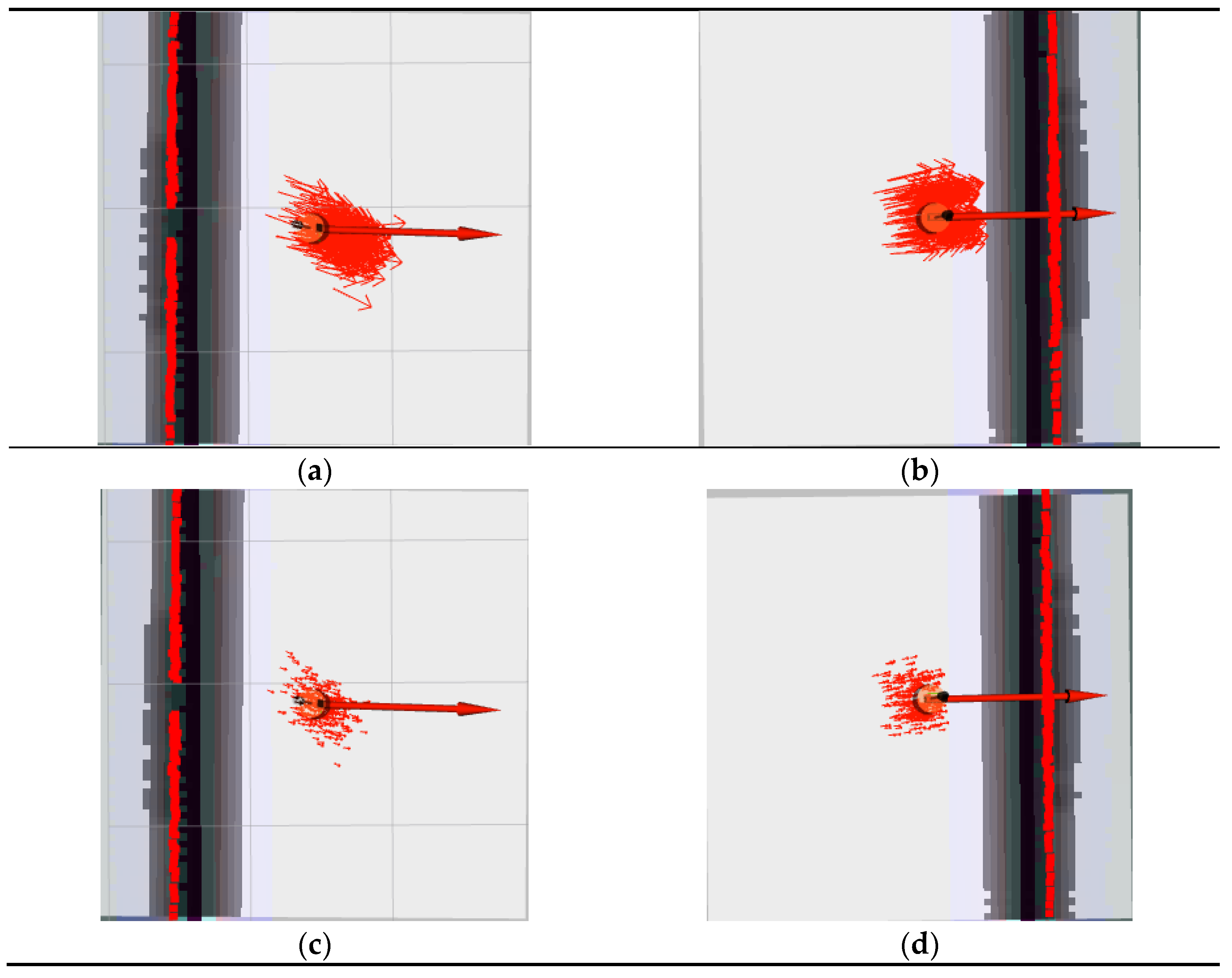
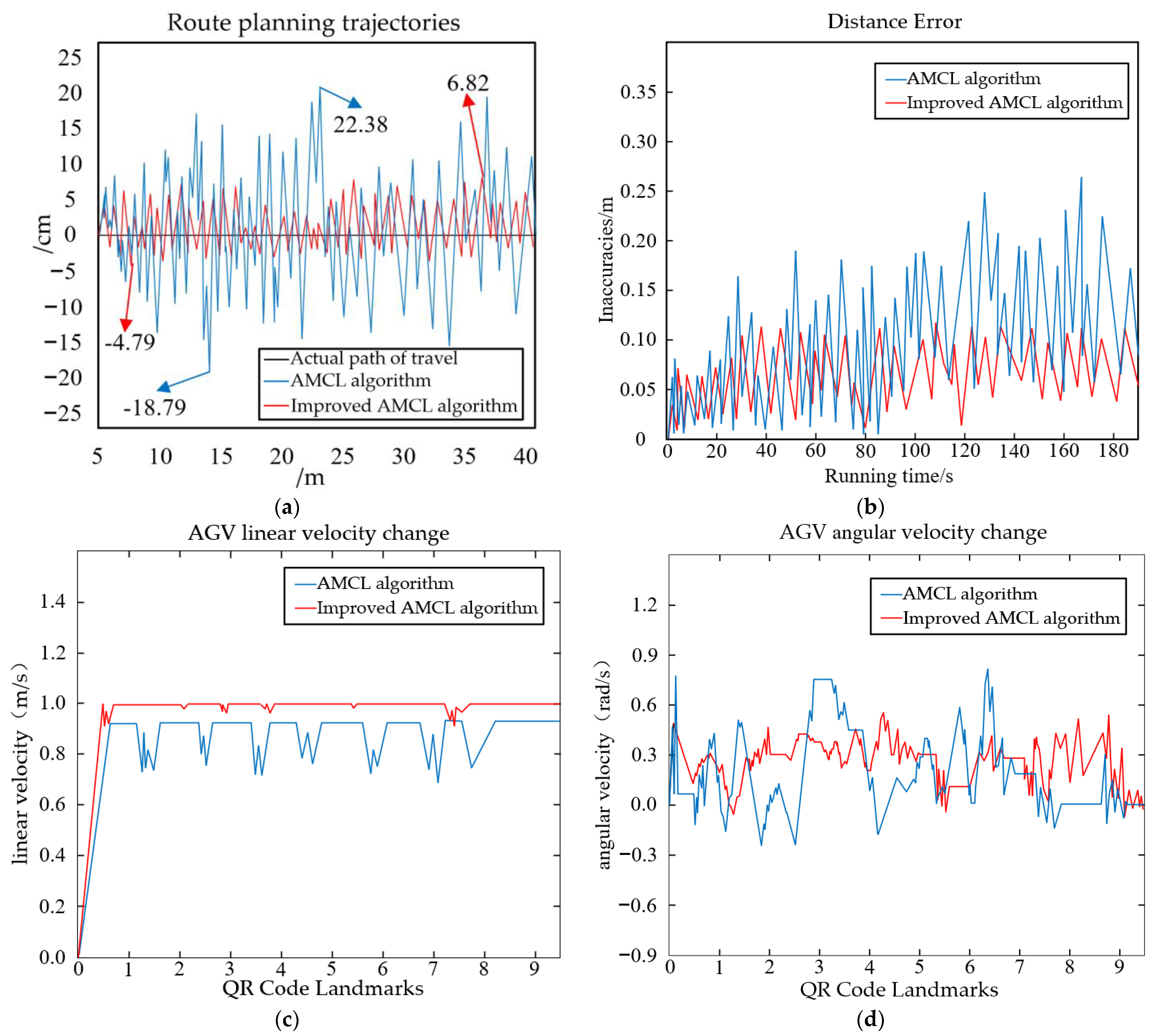
- When the particles generated by the AMCL algorithm encounter the kidnapping situation, i.e., the AGV generates too much offset and the particle state does not change with the movement of the AGV. Through comparison, it can be learnt that the improved AMCL algorithm can quickly adjust the attitude and correct the offset distance, so that it can quickly return to the original travelling route, and the resumption of the adjustment time has been improved by 68.73% compared with the unimproved algorithm.
- 5
- During AGV navigation, the time required for navigation was reduced by 42.81% compared to the unimproved algorithm. The navigation time is greatly reduced, which speeds up the time to process the goods and improves the turnaround speed and capacity of the goods. The positioning accuracy is an important criterion to measure the accuracy of the proposed algorithm. In this paper, by comparing and contrasting, it is concluded that the positioning accuracy is improved by 64.27% compared to the previous algorithm.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cheng, W.; Chen, J.; Yang, L.; Li, Z.; Zhou, Y. Optimization design and implementation of automatic guided vehicle. J. Hunan Inst. Technol. Nat. Sci. Ed. 2021, 34, 45–49. (In Chinese) [Google Scholar]
- Bechtsis, D.; Tsolakis, N.; Vlachos, D.; Iakovou, E. Sustainable supply chain management in the digitalisation era: The impact of Automated Guided Vehicles. J. Clean. Prod. 2017, 142, 3970–3984. [Google Scholar] [CrossRef]
- Okumuş, F.; Kocamaz, A.F. Cloud Based Indoor Navigation for ROS-enabled Automated Guided Vehicles. In Proceedings of the 2019 International Artificial Intelligence and Data Processing Symposium (IDAP), Malatya, Turkey, 21–22 September 2019; pp. 1–4. [Google Scholar]
- Li, Y. Research on Multi-AGVs Cooperative Transportation Strategy in Warehouse Logistics Environment Based on HCA Algorithm. In Proceedings of the 2023 IEEE 2nd International Conference on Electrical Engineering, Big Data and Algorithms (EEBDA), Changchun, China, 24–26 February 2023; pp. 1753–1758. [Google Scholar] [CrossRef]
- Li, W.; Zhang, N.; Yao, Y.; Zhan, H.; Ding, Y. Research on Vision Navigation and Positioning of AGV Terminal Based on QR Code. In Proceedings of the 2020 IEEE 9th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 11–13 December 2020; pp. 845–848. [Google Scholar] [CrossRef]
- Zhang, B.; Zhu, M.; Lin, C.; Zhu, D. Research on AGV map building and positioning based on SLAM technology. In Proceedings of the 2022 IEEE 5th International Conference on Automation, Electronics and Electrical Engineering (AUTEEE), Shenyang, China, 18–20 November 2022; pp. 707–713. [Google Scholar] [CrossRef]
- Bach, S.H.; Khoi, P.B.; Yi, S.Y. Application of QR Code for Localization and Navigation of Indoor Mobile Robot. IEEE Access 2023, 11, 28384–28390. [Google Scholar] [CrossRef]
- Kulaç, N.; Engin, M. Developing a Machine Learning Algorithm for Service Robots in Industrial Applications. Machines 2023, 11, 421. [Google Scholar] [CrossRef]
- Kumar, P.; Khaparde, A. QR Code Detector and Follower with Kalman Filter. In Proceedings of the 2022 International Interdisciplinary Humanitarian Conference for Sustainability (IIHC), Bengaluru, India, 18–19 November 2022; pp. 1423–1426. [Google Scholar] [CrossRef]
- Zhou, C.; Liu, X. The Study of Applying the AGV Navigation System Based on Two Dimensional Bar Code. In Proceedings of the 2016 International Conference on Industrial Informatics—Computing Technology, Intelligent Technology, Industrial Information Integration (ICIICII), Wuhan, China, 3–4 December 2016; pp. 206–209. [Google Scholar] [CrossRef]
- Talwar, D.; Jung, S. Particle Filter-based Localization of a Mobile Robot by Using a Single Lidar Sensor under SLAM in ROS Environment. In Proceedings of the 2019 19th International Conference on Control, Automation and Systems (ICCAS), Jeju, Republic of Korea, 15–18 October 2019; pp. 1112–1115. [Google Scholar] [CrossRef]
- Zhang, X.; Mu, X.; Liu, H.; He, B.; Yan, T. Application of Modified EKF Based on Intelligent Data Fusion in AUV Navigation. In Proceedings of the 2019 IEEE Underwater Technology (UT), Kaohsiung, Taiwan, 16–19 April 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Trisnawan, I.K.N.; Jati, A.N. Monte Carlo method is a kind of calculation method, but it is very different from the general numerical calculation method, it is based on the theory of probability statistics. In Proceedings of the 2019 International Conference on Computer, Control, Informatics and its Applications (IC3INA), Tangerang, Indonesia, 23–24 October 2019; pp. 187–192. [Google Scholar]
- dos Reis, W.P.N.; Morandin, O.; Vivaldini, K.C.T. A Quantitative Study of Tuning ROS Adaptive Monte Carlo Localization Parameters and their Effect on an AGV Localization. In Proceedings of the 2019 19th International Conference on Advanced Robotics (ICAR), Belo Horizonte, Brazil, 2–6 December 2019; pp. 302–307. [Google Scholar] [CrossRef]
- Zeghmi, L.; Amamou, A.; Kelouwani, S.; Boisclair, J.; Agbossou, K. A Kalman-Particle Hybrid Filter For Improved Localization of AGV In Indoor Environment. In Proceedings of the 2022 2nd International Conference on Robotics, Automation and Artificial Intelligence (RAAI), Singapore, Singapore, 9–11 December 2022; pp. 141–147. [Google Scholar] [CrossRef]
- Zou, Q. Research on Mobile Robot Navigation Method Based on Graph Optimization SLAM. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2017. (In Chinese). [Google Scholar]
- Zhang, F.; Li, S.; Yuan, S.; Sun, E.; Zhao, L. Algorithms analysis of mobile robot SLAM based on Kalman and particle filter. In Proceedings of the 2017 9th International Conference on Modelling, Identification and Control (ICMIC), Kunming, China, 10–12 July 2017; pp. 1050–1055. [Google Scholar] [CrossRef]
- Kumar NT, S.; Gawande, M.; M, N.P.B.; Verma, H.; Rajalakshmi, P. Mobile Robot Terrain Mapping for Path Planning using Karto Slam and Gmapping Technique. In Proceedings of the 2022 IEEE Global Conference on Computing, Power and Communication Technologies (GlobConPT), New Delhi, India, 23–25 September 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Chung, M.-A.; Lin, C.-W. An Improved Localization of Mobile Robotic System Based on AMCL Algorithm. IEEE Sens. J. 2022, 22, 900–908. [Google Scholar] [CrossRef]
- Tiwari, S. An Introduction to QR Code Technology. In Proceedings of the 2016 International Conference on Information Technology (ICIT), Bhubaneswar, India, 22–24 December 2016; pp. 39–44. [Google Scholar] [CrossRef]
- Cui, G.; Bai, Y.; Li, S. AGV Research Based on Inertial Navigation and Vision Fusion. In Proceedings of the 2021 5th CAA International Conference on Vehicular Control and Intelligence (CVCI), Tianjin, China, 29–31 October 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Zheng, Z.; Yu, Y.; Chen, R.; Huang, H.; Zhao, H.; Lu, X. Localization Method Based on Multi-QR Codes for Mobile Robots. In Proceedings of the 2022 IEEE International Conference on Advances in Electrical Engineering and Computer Applications (AEECA), Dalian, China, 20–21 August 2022; pp. 1385–1391. [Google Scholar] [CrossRef]
- Li, Z.; Huang, J. Study on the use of Q-R codes as landmarks for indoor positioning: Preliminary results. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 1270–1276. [Google Scholar] [CrossRef]
- Xia, L.; Cui, J.; Shen, R.; Xu, X.; Gao, Y.; Li, X. A Survey of Image Semantics-based Visual Simultaneous Localization and Mapping: Application-oriented Solutions to Autonomous Navigation of Mobile Robots. Int. J. Adv. Robot. Syst. 2020, 17, 4158. [Google Scholar] [CrossRef]
- Balasuriya, B.; Chathuranga, B.; Jayasundara, B.; Napagoda, N.; Kumarawadu, S.; Chandima, D.; Jayasekara, A. Outdoor robot navigation using Gmapping based SLAM algorithm. In Proceedings of the 2016 Moratuwa Engineering Research Conference (MERCon), Moratuwa, Sri Lanka, 5–6 April 2016; pp. 403–408. [Google Scholar] [CrossRef]
- Su, Z.; Zhou, J.; Dai, J.; Zhu, Y. Optimization Design and Experimental Study of Gmapping Algorithm. In Proceedings of the 2020 Chinese Control And Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 4894–4898. [Google Scholar] [CrossRef]
- Zhou, H.; Chou, W.; Tuo, W.; Rong, Y.; Xu, S. Mobile Manipulation Integrating Enhanced AMCL High-Precision Location and Dynamic Tracking Grasp. Sensors 2020, 20, 6697. [Google Scholar] [CrossRef] [PubMed]
- Qi, X.; Ji, W.; Wang, Q. A Monte Carlo localization Algorithm based on Ranging. In Proceedings of the 2019 3rd International Conference on Electronic Information Technology and Computer Engineering (EITCE), Xiamen, China, 6–8 November 2019; pp. 1663–1666. [Google Scholar] [CrossRef]
- Zhang, H.; Sun, C.-L.; Zeng, Y.-M.; Li, P.-P. A Fusion Localization Algorithm Combining MCL with EKF. In Proceedings of the 2018 17th International Symposium on Distributed Computing and Applications for Business Engineering and Science (DCABES), Wuxi, China, 19–23 October 2018; pp. 216–220. [Google Scholar] [CrossRef]
- Dong, S.; Lin, R.; Zhao, W.-W.; Cheng, Y.-H. Robot Global Relocalization Based on Multi-sensor Data Fusion. In Proceedings of the 2022 2nd International Conference on Robotics, Automation and Artificial Intelligence (RAAI), Singapore, Singapore, 9–11 December 2022; pp. 35–42. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Standard KLD Resampling Method | Improved KLD Resampling Method |
|---|---|---|
| Running Time | 232 | 75 |
| Variance | 1.63 | 0.71 |
| Variance | 1.35 | 0.84 |
| Variance | 2.59 | 0.93 |
| Parametric | Algorithm | Value |
|---|---|---|
| Maximum offset angle | AMCL | 30° |
| Improved AMCL | 21° | |
| Minimum offset angle | AMCL | 24° |
| Improved AMCL | 10° | |
| Average travel time for one lap | AMCL | 7.3 s |
| Improved AMCL | 5.5 s | |
| Maximum error from target point | AMCL | 34 cm |
| Improved AMCL | 11 cm | |
| Minimum error from target point | AMCL | 24 cm |
| Improved AMCL | 5.2 cm |
| Name | Number |
|---|---|
| Maximum linear speed | |
| Maximum angular velocity | |
| Maximum linear acceleration | |
| Maximum angular acceleration | |
| Radar scanning angle | |
| Radar scanning frequency | |
| Maximum measurement distance of radar | |
| Improved AMCL algorithm particle initial value | |
| Resampling measurement | Low variance resampling |
| Parametric | Algorithm | Value |
|---|---|---|
| Starting particle | AMCL | 1500 |
| Improved AMCL | 1500 | |
| Time from start to target (10-turn average) | AMCL | 12.59 s |
| Improved AMCL | 7.42 s | |
| Offset maximum distance (both sides) | AMCL | (−18.79, 22.38) cm |
| Improved AMCL | (−4.79, 6.82) cm | |
| Deviation distance to target point (10-turn average) | AMCL | 27.36 cm |
| Improved AMCL | 4.81 cm | |
| Dissolution of kidnapping recovery time (10-turn average) | AMCL | 2.2 s |
| Improved AMCL | 0.39 s |
| Average Value | Actual Position Coordinates | Particle Triangulation Matching Position Coordinates | Industrial Camera Scanning Position Coordinates | Scanning Fusion Improved AMCL | Maximum Left Offset Maximum Right Offset |
|---|---|---|---|---|---|
| Cycle 5 times | (0, 375.00) cm | (1.96, 377.92) cm | (3.24, 373.16) cm | (0.59, 374.25) cm | (0.88, 0.53) cm |
| Cycle 10 times | (0, 375.00) cm | (2.88, 373.40) cm | (2.64, 377.88) cm | (0.36, 375.40) cm | (0.56, 0.62) cm |
| Cycle 20 times | (0, 375.00) cm | (3.72, 377.34) cm | (1.52, 377.50) cm | (0.42, 375.34) cm | (0.78, 0.62) cm |
| Cycle 30 times | (0, 375.00) cm | (2.48, 373.68) cm | (2.44, 373.32) cm | (0.44, 375.32) cm | (0.84, 0.66) cm |
| Cycle 50 times | (0, 375.00) cm | (1.54, 377.12) cm | (3.72, 377.48) cm | (0.72, 374.48) cm | (0.76, 0.64) cm |
| Number of Cycles | Algorithm | Number of Kidnapping Incidents | Cumulative Time /Average Time (s) | Maximum/Minimum Recovery Time (s) | Maximum/Minimum Positioning Error (cm) |
|---|---|---|---|---|---|
| 10 | AMCL | 17 | 51.64/3.04 | 2.59/1.75 | 22.81/15.69 |
| Improved AMCL | 2 | 1.18/0.59 | 0.12/0.06 | 3.88/1.72 | |
| 20 | AMCL | 31 | 79.04/2.54 | 2.78/1.16 | 19.26/10.71 |
| Improved AMCL | 3 | 1.56/0.52 | 0.21/0.02 | 4.33/2.28 | |
| 30 | AMCL | 44 | 119.68/2.72 | 2.13/1.54 | 21.16/9.31 |
| Improved AMCL | 5 | 2.26/0.45 | 0.51/0.03 | 3.29/1.61 | |
| 40 | AMCL | 60 | 146.28/2.44 | 2.88/1.02 | 18.74/11.26 |
| Improved AMCL | 8 | 3.28/0.40 | 0.96/0.02 | 5.10/2.13 | |
| 50 | AMCL | 71 | 162.64/2.29 | 1.35/0.97 | 16.89/8.92 |
| Improved AMCL | 10 | 4.18/0.41 | 0.29/0.05 | 3.77/1.02 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Li, S.; Qiu, J.; You, G.; Qu, L. Application and Research on Improved Adaptive Monte Carlo Localization Algorithm for Automatic Guided Vehicle Fusion with QR Code Navigation. Appl. Sci. 2023, 13, 11913. https://doi.org/10.3390/app132111913
Zhang B, Li S, Qiu J, You G, Qu L. Application and Research on Improved Adaptive Monte Carlo Localization Algorithm for Automatic Guided Vehicle Fusion with QR Code Navigation. Applied Sciences. 2023; 13(21):11913. https://doi.org/10.3390/app132111913
Chicago/Turabian StyleZhang, Bowen, Shiyun Li, Junting Qiu, Gang You, and Lishuang Qu. 2023. "Application and Research on Improved Adaptive Monte Carlo Localization Algorithm for Automatic Guided Vehicle Fusion with QR Code Navigation" Applied Sciences 13, no. 21: 11913. https://doi.org/10.3390/app132111913