
Battery Charge Control in Solar Photovoltaic Systems Based on Fuzzy Logic and Jellyfish Optimization Algorithm

 , and
, and
Abstract
:1. Introduction
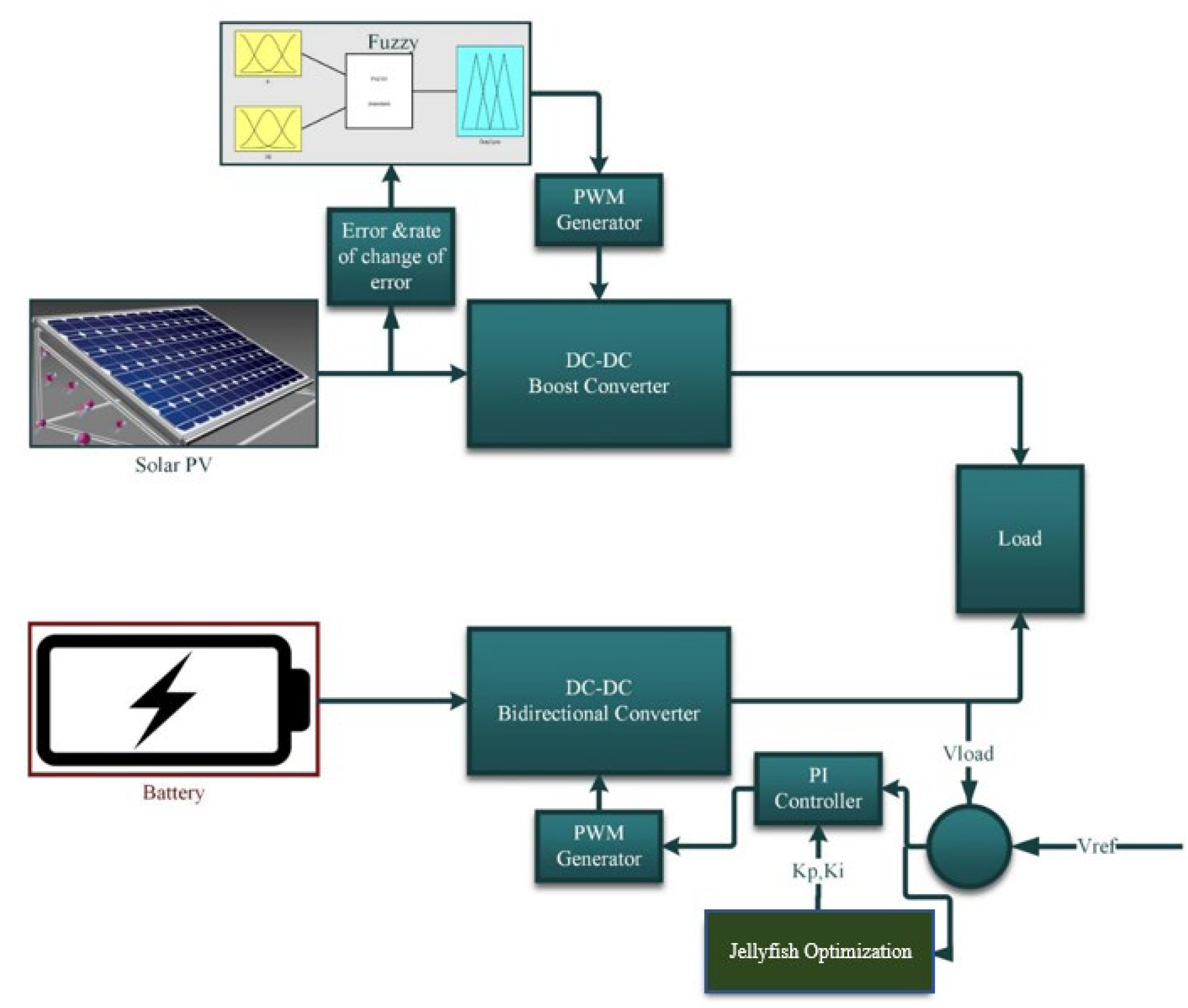
2. Fuzzy and Jellyfish Optimization-Controlled Solar PV Battery System
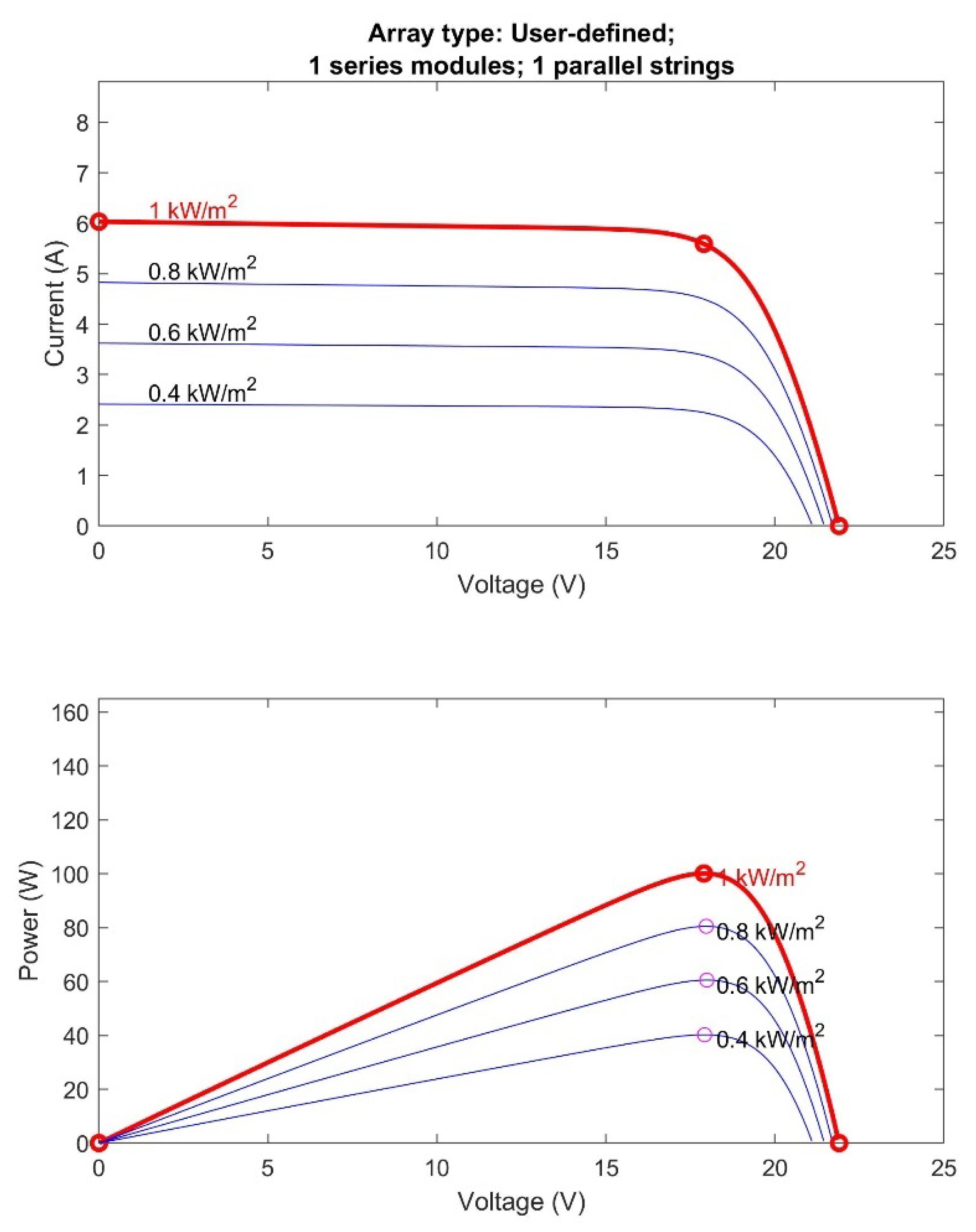
2.1. Solar PV System
- When the current through the PV cell is 0, open circuit voltage (VOC) is the PV cell voltage.
- When the voltage through the PV cell is 0, short circuit current (ISC) is the PV cell current.
2.2. DC–DC Boost Converter
2.3. Fuzzy MPPT Implementation
2.3.1. Fuzzification
2.3.2. Rule Inference
2.3.3. Defuzzification
2.4. Bidirectional DC–DC Converter
2.5. Voltage Control of DC Bus via Proportional Integral Controller
Jellyfish Optimization Algorithm
- A walker or jellyfish can alternate between moving within the group and following the ocean current while intermittently switching the two phases.
- Jellyfish swim throughout the ocean in search of food. They are more attracted to locations with abundant sustenance.
- The quantity of food found depends on the target’s location and function.
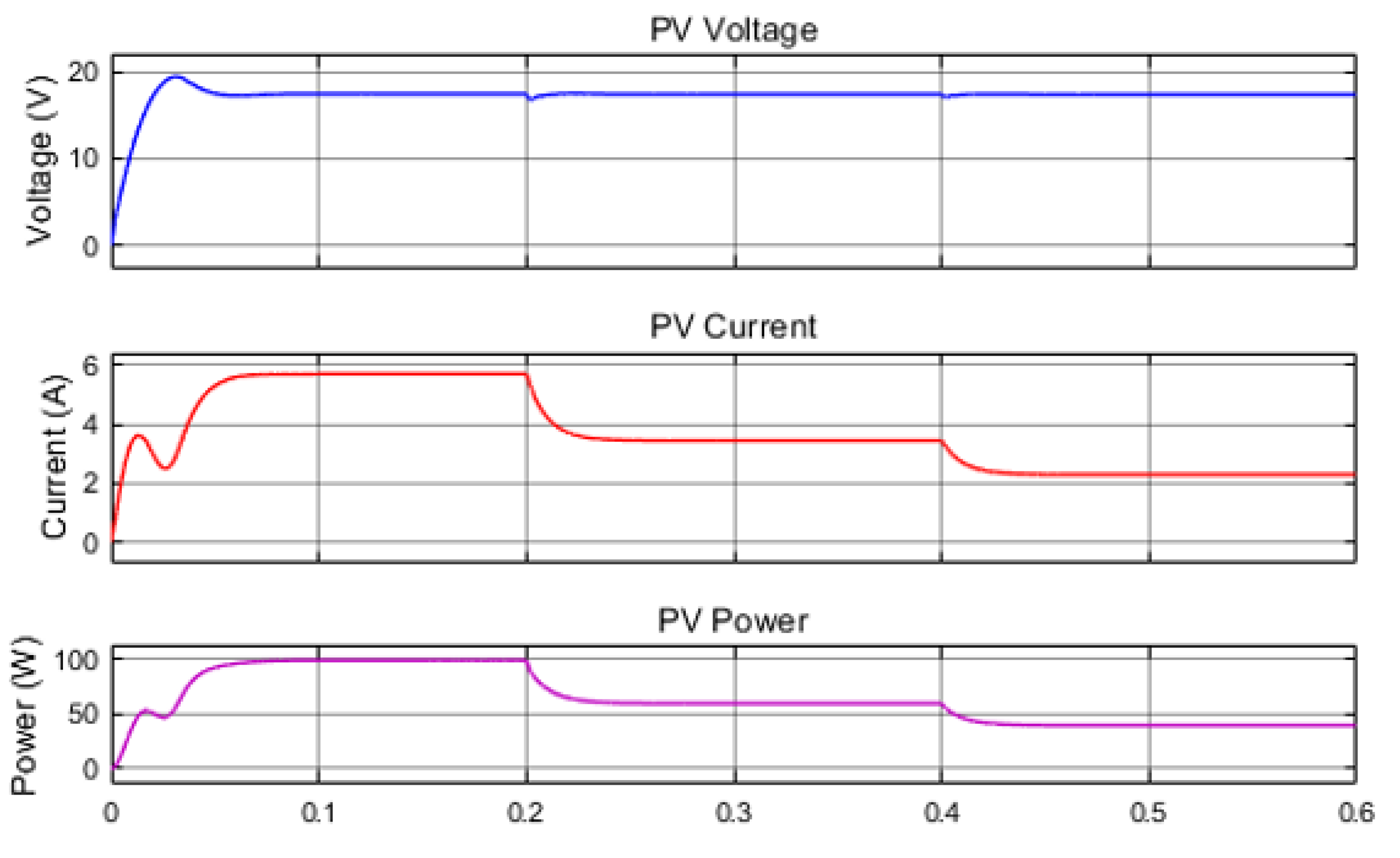
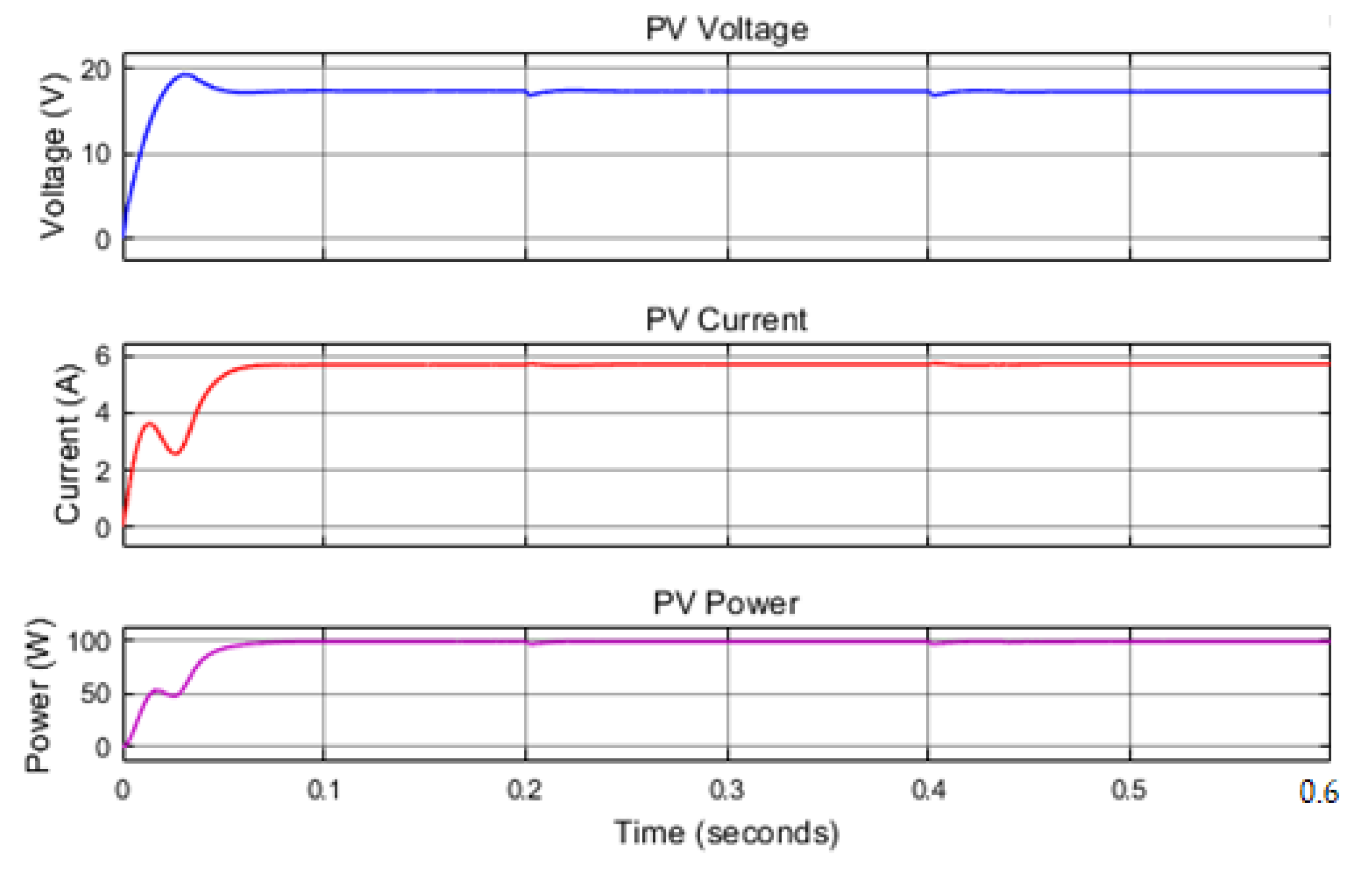
3. Simulation Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wazirali, R.; Yaghoubi, E.; Abujazar, M.S.S.; Ahmad, R.; Vakili, A.H. State-of-the-art review on energy and load forecasting in microgrids using artificial neural networks, machine learning, and deep learning techniques. Electr. Power Syst. Res. 2023, 225, 109792. [Google Scholar] [CrossRef]
- Demirbaş, A. Global renewable energy resources. Energy Sources 2006, 28, 779–792. [Google Scholar] [CrossRef]
- Jing, W.; Lai, C.H.; Wong, W.S.H.; Wong, M.L.D. A comprehensive study of battery-supercapacitor hybrid energy storage system for standalone PV power system in rural electrification. Appl. Energy 2018, 224, 340–356. [Google Scholar] [CrossRef]
- Subudhi, B.; Pradhan, R. A comparative study on maximum power point tracking techniques for photovoltaic power systems. IEEE Trans. Sustain. Energy 2012, 4, 89–98. [Google Scholar] [CrossRef]
- Sarvi, M.; Azadian, A. A comprehensive review and classified comparison of MPPT algorithms in PV systems. Energy Syst. 2022, 13, 281–320. [Google Scholar] [CrossRef]
- Alam, A.; Verma, P.; Tariq, M.; Sarwar, A.; Alamri, B.; Zahra, N.; Urooj, S. Jellyfish search optimization algorithm for mpp tracking of pv system. Sustainability 2021, 13, 11736. [Google Scholar] [CrossRef]
- Belhachat, F.; Larbes, C. A review of global maximum power point tracking techniques of photovoltaic system under partial shading conditions. Renew. Sustain. Energy Rev. 2018, 92, 513–553. [Google Scholar] [CrossRef]
- Fong, K.C.; McIntosh, K.R.; Blakers, A.W. Accurate series resistance measurement of solar cells. Prog. Photovolt. Res. Appl. 2013, 21, 490–499. [Google Scholar] [CrossRef]
- Pysch, D.; Mette, A.; Glunz, S.W. A review and comparison of different methods to determine the series resistance of solar cells. Sol. Energy Mater. Sol. Cells 2007, 91, 1698–1706. [Google Scholar] [CrossRef]
- Benghanem, M.S.; Alamri, S.N. Modeling of photovoltaic module and experimental determination of serial resistance. J. Taibah Univ. Sci. 2009, 2, 94–105. [Google Scholar] [CrossRef]
- Gross, R.; Leach, M.; Bauen, A. Progress in renewable energy. Environ. Int. 2003, 29, 105–122. [Google Scholar] [CrossRef] [PubMed]
- Eltamaly, A.M.; Alolah, A.I.; Abdulghany, M.Y. Digital implementation of general purpose fuzzy logic controller for photovoltaic maximum power point tracker. In Proceedings of the SPEEDAM 2010, Pisa, Italy, 14–16 June 2010; pp. 622–627. [Google Scholar]
- Eltamaly, A. Performance of smart maximum power point tracker under partial shading conditions of photovoltaic systems. In Proceedings of the IEEE International Conference on Smart Energy Grid Engineering (SEGE), Oshawa, ON, Canada, 17–19 August 2015; Volume 7. [Google Scholar]
- Crocker, F.A. Prediction of Photovoltaic (PV) Output via Artificial Neural Network (ann) Based on Real Climate Condition. Master’s Thesis, University Tun Hussein Onn, Parit Raja, Malaysia, 2017. [Google Scholar]
- Neupane, S.; Kumar, A. Modeling and Simulation of PV array in Matlab/Simulink for comparison of perturb and observe & incremental conductance algorithms using buck converter. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2017, 4, 2479–2486. [Google Scholar]
- Vishwakarma, S. Study of Partial shading effect on Solar Module Using MATLAB. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2017, 6, 5303–5308. [Google Scholar]
- Saon, S.; Chee, W.S. Development of optimum controller based on MPPT for photovoltaic system during shading condition. Procedia Eng. 2013, 53, 337–346. [Google Scholar]
- Kotak, V.C.; Tyagi, P. DC to DC Converter in maximum power point tracker. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2013, 2, 6115–6125. [Google Scholar]
- Chou, J.-S.; Truong, D.-N. Multiobjective optimization inspired by behavior of jellyfish for solving structural design problems. Chaos Solitons Fractals 2020, 135, 109738. [Google Scholar] [CrossRef]
- Chou, J.-S.; Truong, D.-N. A novel metaheuristic optimizer inspired by behavior of jellyfish in ocean. Appl. Math. Comput. 2021, 389, 125535. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| E | ||||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | Z | PS | PM | PB | ||
| ec | NB | Z | Z | Z | NB | NB | NB | NM |
| NM | Z | Z | Z | NS | NM | NM | NM | |
| NS | NS | Z | Z | Z | NS | NS | NS | |
| Z | NM | NS | Z | Z | Z | PS | PM | |
| PS | PS | PM | PM | PS | Z | Z | Z | |
| PM | PM | PM | PM | Z | Z | Z | Z | |
| PB | PB | PB | PB | Z | Z | Z | Z | |
| Parameter | Voltage (V) | Current (A) | Power (W) |
|---|---|---|---|
| PV | 17.4 | 5.71 | 99.5 |
| Battery | 13 | −3.48 | −45.3 |
| Load | 24 | 2.08 | 50 |
| Irradiance | 1000 W/m2 | 600 W/m2 | 400 W/m2 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Parameter | Voltage (V) | Current (A) | Power (W) | Voltage (V) | Current (A) | Power (W) | Voltage (V) | Current (A) | Power (W) |
| PV | 17.4 | 5.71 | 99.5 | 17.4 | 3.45 | 59.9 | 17.4 | 2.3 | 39.9 |
| Battery | 13 | −3.48 | −45.3 | 12.9 | −0.549 | −7.11 | 12.9 | 0.954 | 12.3 |
| Load | 24 | 2.08 | 50 | 24 | 2.08 | 50 | 24 | 2.08 | 50 |
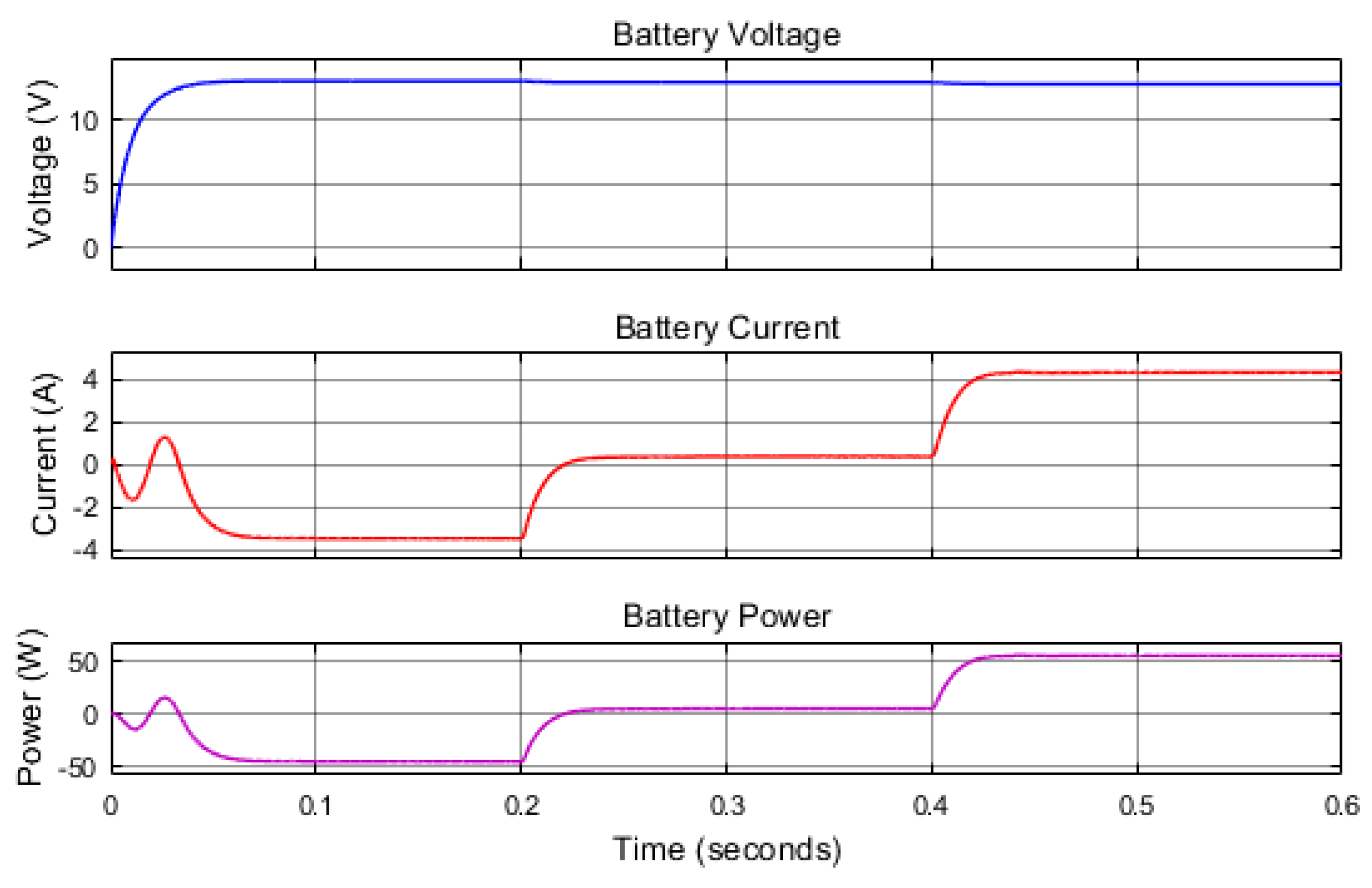
| Load | 50 W | 100 W | 150 W | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Parameter | Voltage (V) | Current (A) | Power (W) | Voltage (V) | Current (A) | Power (W) | Voltage (V) | Current (A) | Power (W) |
| PV | 17.4 | 5.71 | 99.5 | 17.4 | 5.71 | 99.5 | 17.4 | 5.71 | 99.5 |
| Battery | 13 | −3.48 | −45.3 | 12.9 | 0.371 | 4.79 | 12.8 | 4.32 | 55.2 |
| Load | 24 | 2.08 | 50 | 24 | 4.16 | 100 | 24 | 6.25 | 150 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed Ali Agoub, R.; Hançerlioğullari, A.; Rahebi, J.; Lopez-Guede, J.M. Battery Charge Control in Solar Photovoltaic Systems Based on Fuzzy Logic and Jellyfish Optimization Algorithm. Appl. Sci. 2023, 13, 11409. https://doi.org/10.3390/app132011409
Ahmed Ali Agoub R, Hançerlioğullari A, Rahebi J, Lopez-Guede JM. Battery Charge Control in Solar Photovoltaic Systems Based on Fuzzy Logic and Jellyfish Optimization Algorithm. Applied Sciences. 2023; 13(20):11409. https://doi.org/10.3390/app132011409
Chicago/Turabian StyleAhmed Ali Agoub, Ramadan, Aybaba Hançerlioğullari, Javad Rahebi, and Jose Manuel Lopez-Guede. 2023. "Battery Charge Control in Solar Photovoltaic Systems Based on Fuzzy Logic and Jellyfish Optimization Algorithm" Applied Sciences 13, no. 20: 11409. https://doi.org/10.3390/app132011409