
Tree Seedlings Detection and Counting Using a Deep Learning Algorithm

Abstract
:1. Introduction
2. Materials and Methods
2.1. Dataset
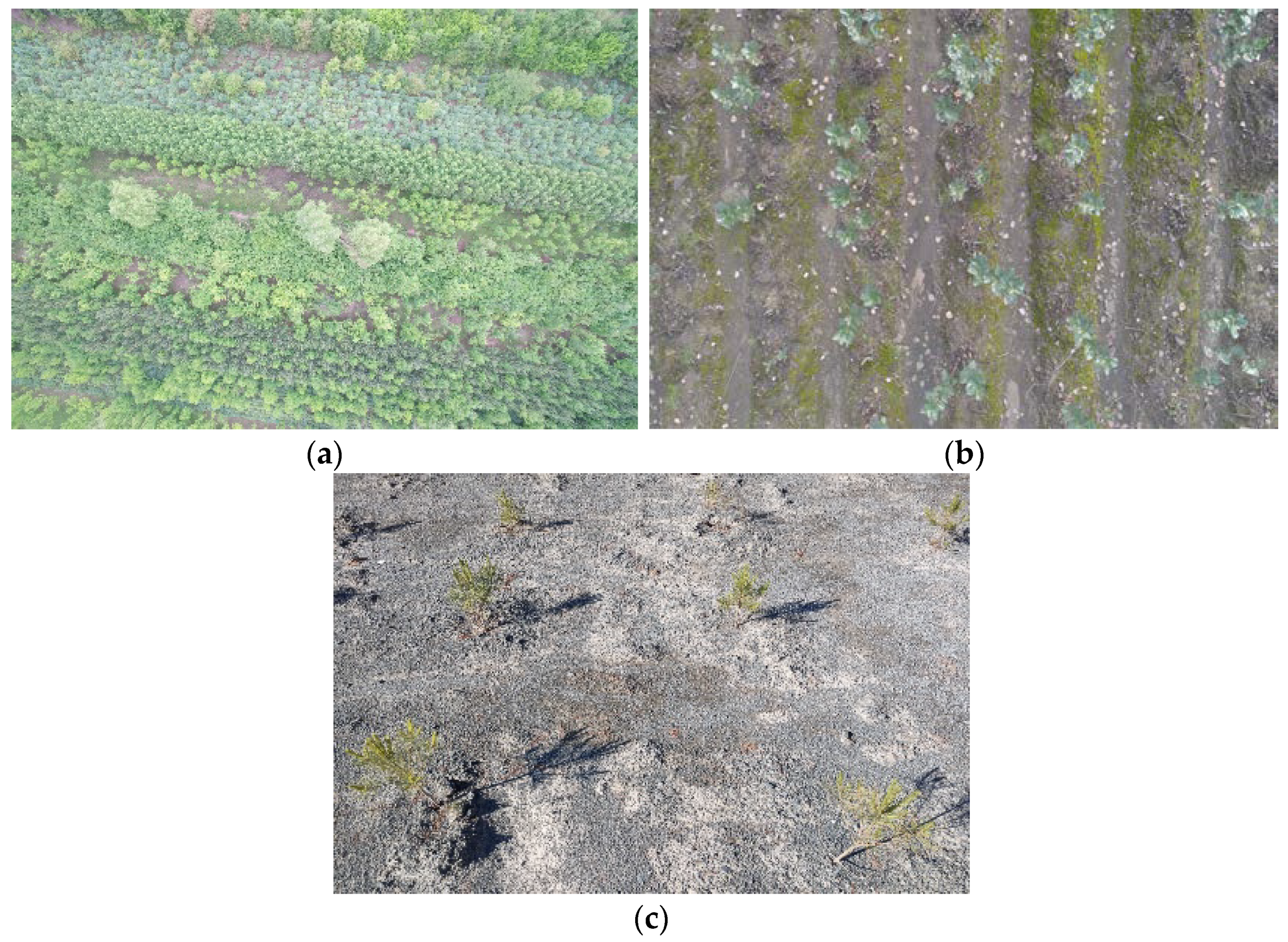
2.1.1. Data Collection
2.1.2. Data Preprocessing
2.1.3. Data Augmentation
2.2. Methods
2.2.1. YOLOv5 Network Architecture
2.2.2. Experiment Environment
2.2.3. Evaluation Indicators
3. Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Crowther, T.W.; Glick, H.B.; Covey, K.R.; Bettigole, C.; Maynard, D.S.; Thomas, S.M.; Smith, J.R.; Hintler, G.; Duguid, M.C.; Amatulli, G. Mapping tree density at a global scale. Nature 2015, 525, 201–205. [Google Scholar] [CrossRef] [PubMed]
- Khan, S.; Gupta, P.K. Comparitive study of tree counting algorithms in dense and sparse vegetative regions. In International Archives of the Photogrammetry, Remote Sensing & Spatial Information Sciences, Proceedings of the ISPRS TC V Mid-Term Symposium “Geospatial Technology–Pixel to People”, Dehradun, India, 20–23 November 2018; ISPRS: Dehradun, India, 2018. [Google Scholar]
- Ha, D.; Tang, Y. Collective intelligence for deep learning: A survey of recent developments. Collect. Intell. 2022, 1, 114874. [Google Scholar] [CrossRef]
- Tucker, J.D.; Azimi-Sadjadi, M.R. Coherence-based underwater target detection from multiple disparate sonar platforms. IEEE J. Ocean. Eng. 2011, 36, 37–51. [Google Scholar] [CrossRef]
- Song, K.K.; Zhao, M.; Liao, X.; Tian, X.; Zhu, Y.; Xiao, J.; Peng, C. An Improved Bearing Defect Detection Algorithm Based on Yolo. In Proceedings of the 2022 International Symposium on Control Engineering and Robotics (ISCER), Changsha, China, 18–20 February 2022; pp. 184–187. [Google Scholar]
- Baghdasaryan, V.H. Eye Pupil Localisation and Labeling Using a Small Size Database and YOLOv4 Object Detection Algorithm. Int. J. Sci. Adv. 2022, 3, 2708–7972. [Google Scholar] [CrossRef]
- Yuan, X.; Li, D.; Sun, P.; Wang, G.; Ma, Y. Real-Time Counting and Height Measurement of Nursery Seedlings Based on Ghostnet–YoloV4 Network and Binocular Vision Technology. Forests 2022, 13, 1459. [Google Scholar] [CrossRef]
- Wu, W.; Zheng, J.; Fu, H.; Li, W.; Yu, L. Cross-regional oil palm tree detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 14–19 June 2020; pp. 56–57. [Google Scholar]
- Alburshaid, E.; Mangoud, M. Developing Date Palm Tree Inventory from Satellite Remote Sensed Imagery using Deep Learning. In Proceedings of the 2021 3rd IEEE Middle East and North Africa Communications Conference (MENACOMM), Agadir, Morocco, 3–5 December 2021; pp. 54–59. [Google Scholar]
- Htet, K.S.; Sein, M.M. Toddy Palm Trees Classification and Counting Using Drone Video: Retuning Hyperparameter Mask-RCNN. In Proceedings of the 2021 7th International Conference on Control, Automation and Robotics (ICCAR), Singapore, 23–26 April 2021; pp. 196–200. [Google Scholar]
- Budnik, K.; Byrtek, J.; Kapusta, A. Counting trees-methods of automatic analysis of photogrammetric data in forests of the continental region. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Wroclaw, Poland, 23–25 June 2021; p. 012030. [Google Scholar]
- Kim, J.; Kim, S.; Ju, C.; Son, H.I. Unmanned aerial vehicles in agriculture: A review of perspective of platform, control, and applications. IEEE Access 2019, 7, 105100–105115. [Google Scholar] [CrossRef]
- Csillik, O.; Cherbini, J.; Johnson, R.; Lyons, A.; Kelly, M. Identification of citrus trees from unmanned aerial vehicle imagery using convolutional neural networks. Drones 2018, 2, 39. [Google Scholar] [CrossRef] [Green Version]
- Osco, L.P.; De Arruda, M.d.S.; Junior, J.M.; Da Silva, N.B.; Ramos, A.P.M.; Moryia, É.A.S.; Imai, N.N.; Pereira, D.R.; Creste, J.E.; Matsubara, E.T. A convolutional neural network approach for counting and geolocating citrus-trees in UAV multispectral imagery. ISPRS J. Photogramm. Remote Sens. 2020, 160, 97–106. [Google Scholar] [CrossRef]
- Zheng, S.; Luo, D. Recognition and Counting of Citrus Trees Based on UAV Images. In Proceedings of the 2021 4th International Conference on Advanced Electronic Materials, Computers and Software Engineering (AEMCSE), Changsha, China, 26–28 March 2021; pp. 703–706. [Google Scholar]
- Mohan, M.; de Mendonça, B.A.F.; Silva, C.A.; Klauberg, C.; de Saboya Ribeiro, A.S.; de Araújo, E.J.G.; Monte, M.A.; Cardil, A. Optimizing individual tree detection accuracy and measuring forest uniformity in coconut (Cocos nucifera L.) plantations using airborne laser scanning. Ecol. Model. 2019, 409, 108736. [Google Scholar] [CrossRef]
- Iqbal, M.S.; Ali, H.; Tran, S.N.; Iqbal, T. Coconut trees detection and segmentation in aerial imagery using mask region-based convolution neural network. IET Comput. Vis. 2021, 15, 428–439. [Google Scholar] [CrossRef]
- Vermote, E.F.; Skakun, S.; Becker-Reshef, I.; Saito, K. Remote sensing of coconut trees in Tonga using very high spatial resolution worldview-3 data. Remote Sens. 2020, 12, 3113. [Google Scholar] [CrossRef]
- Zheng, J.; Wu, W.; Yu, L.; Fu, H. Coconut Trees Detection on the Tenarunga Using High-Resolution Satellite Images and Deep Learning. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 6512–6515. [Google Scholar]
- Dorj, U.-O.; Lee, M.; Han, S. A comparative study on tangerine detection, counting and yield estimation algorithm. Int. J. Secur. Its Appl. 2013, 7, 405–412. [Google Scholar]
- Butte, S.; Vakanski, A.; Duellman, K.; Wang, H.; Mirkouei, A. Potato crop stress identification in aerial images using deep learning-based object detection. Agron. J. 2021, 113, 3991–4002. [Google Scholar] [CrossRef]
- Shorten, C.; Khoshgoftaar, T.M. A survey on image data augmentation for deep learning. J. Big Data 2019, 6, 60. [Google Scholar] [CrossRef]
- Jocher, G.; Chaurasia, A.; Stoken, A.; Borovec, J.; NanoCode012; Kwon, Y.; TaoXie; Michael, K.; Fang, J.; imyhxy; et al. ultralytics/yolov5: v6.2-YOLOv5 Classification Models, Apple M1, Reproducibility, ClearML and Deci.ai Integrations, version 6.2; Zenodo: Geneva, Switzerland, 2022. [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Jintasuttisak, T.; Edirisinghe, E.; Elbattay, A. Deep neural network based date palm tree detection in drone imagery. Comput. Electron. Agric. 2022, 192, 106560. [Google Scholar] [CrossRef]
- Dong, X.; Yan, S.; Duan, C. A lightweight vehicles detection network model based on YOLOv5. Eng. Appl. Artif. Intell. 2022, 113, 104914. [Google Scholar] [CrossRef]
- Zhou, Z. Detection and Counting Method of Pigs Based on YOLOV5_Plus: A Combination of YOLOV5 and Attention Mechanism. Math. Probl. Eng. 2022. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 8759–8768. [Google Scholar]
- Xu, R.; Lin, H.; Lu, K.; Cao, L.; Liu, Y. A forest fire detection system based on ensemble learning. Forests 2021, 12, 217. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plant | Captured Images Area | Captured Images Way | Number of Captured Images |
|---|---|---|---|
| Dragon spruce | Tianheng mountain | DJI Inspire1 UVA | 60 |
| Black Chokeberries | Tianheng mountain | Mobile phone | 300 |
| Scots pine | Acheng district | Mobile phone | 300 |
| Total | 660 | ||
| Name | Parameter |
|---|---|
| Experimental environment | server |
| Operating system | Ubuntu 20.04 |
| CPU | Intel(R) Xeon(R) Gold 6128 |
| GPU | NVIDIA GeForce GTX 1080 Ti |
| Deep learning framework | PyTorch 1.7.0 |
| Language | Python 3.6.5 |
| Deep Learning model | YOLOv5s model |
| Parameters | Optimization Algorithm | Learning Rate | Epoch | Batch Size | Image Size |
|---|---|---|---|---|---|
| Value | SGD | 0.001 | 400 | 2 | 416 × 416 |
| Plant | TP | FN | FP | P (%) | R (%) | F1_Score (%) | Accuracy (%) | mAP |
|---|---|---|---|---|---|---|---|---|
| Dragon spruce | 319 | 170 | 2 | 99.38 | 65.24 | 78.77 | 64.97 | 87.48% |
| Black Chokeberries | 886 | 224 | 113 | 88.69 | 79.82 | 84.02 | 72.44 | 88.37% |
| Scots pine | 329 | 29 | 20 | 94.27 | 91.90 | 93.07 | 87.04 | 93.24% |
| Plant | TP | FN | FP | P (%) | R (%) | F1_Score (%) | Accuracy (%) | mAP |
|---|---|---|---|---|---|---|---|---|
| Dragon spruce | 485 | 4 | 3 | 99.18 | 99.18 | 99.28 | 98.58 | 89.87% |
| Black chokeberries | 1050 | 60 | 36 | 96.69 | 94.59 | 95.63 | 91.62 | 89.19% |
| Scots pine | 350 | 8 | 10 | 97.22 | 97.77 | 97.49 | 95.11 | 95.68% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moharram, D.; Yuan, X.; Li, D. Tree Seedlings Detection and Counting Using a Deep Learning Algorithm. Appl. Sci. 2023, 13, 895. https://doi.org/10.3390/app13020895
Moharram D, Yuan X, Li D. Tree Seedlings Detection and Counting Using a Deep Learning Algorithm. Applied Sciences. 2023; 13(2):895. https://doi.org/10.3390/app13020895
Chicago/Turabian StyleMoharram, Deema, Xuguang Yuan, and Dan Li. 2023. "Tree Seedlings Detection and Counting Using a Deep Learning Algorithm" Applied Sciences 13, no. 2: 895. https://doi.org/10.3390/app13020895