
A Novel Simulation-Optimization Model Built by FloPy: Pollutant Traceability in a Chemical Park in China

Abstract
:1. Introduction
2. Methodology
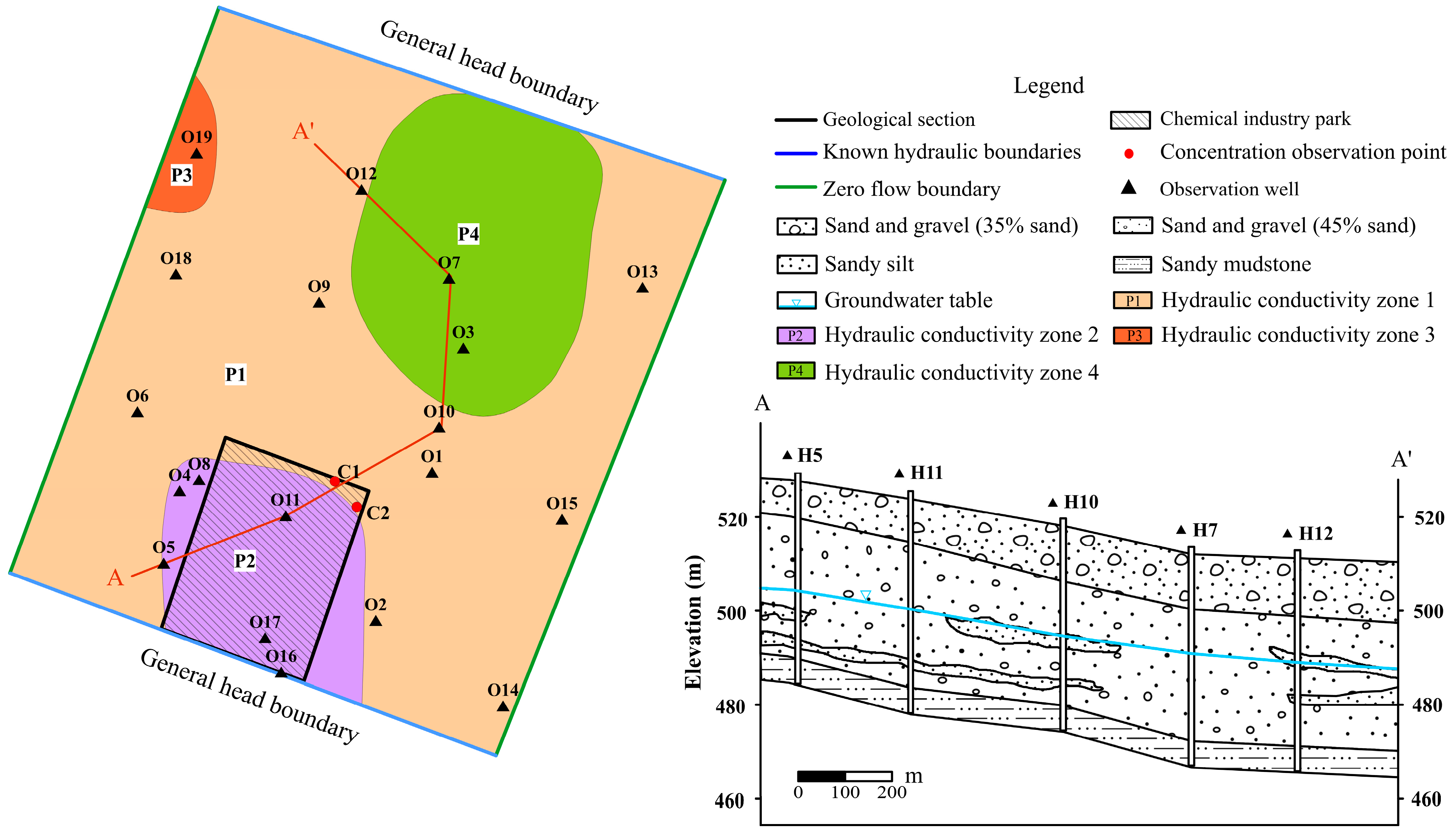
2.1. Study Area Overview
2.2. Bayesian Optimization Methods
2.2.1. Gaussian Process Estimation
2.2.2. Adding New Observation Points
2.2.3. Update the Gaussian Distribution of L(ps)
2.3. SEGA Algorithm
| Algorithm 1: Strengthen Elitist GA Algorithm |
| Begin SEGA |
| Initialize the population according to the code rules |
| Retain the best population |
| do |
| Evaluate fitness value and optimal individuals |
| Perform Selection |
| Perform Crossover on candidates with a high fitness value |
| Perform Mutation on candidates with a high fitness value |
| Update the best population with optimal individuals |
| while (termination threshold is not met) |
| return the best population |
| End SEGA |
2.4. Coupling of Simulation-Optimization Models
3. Model Details
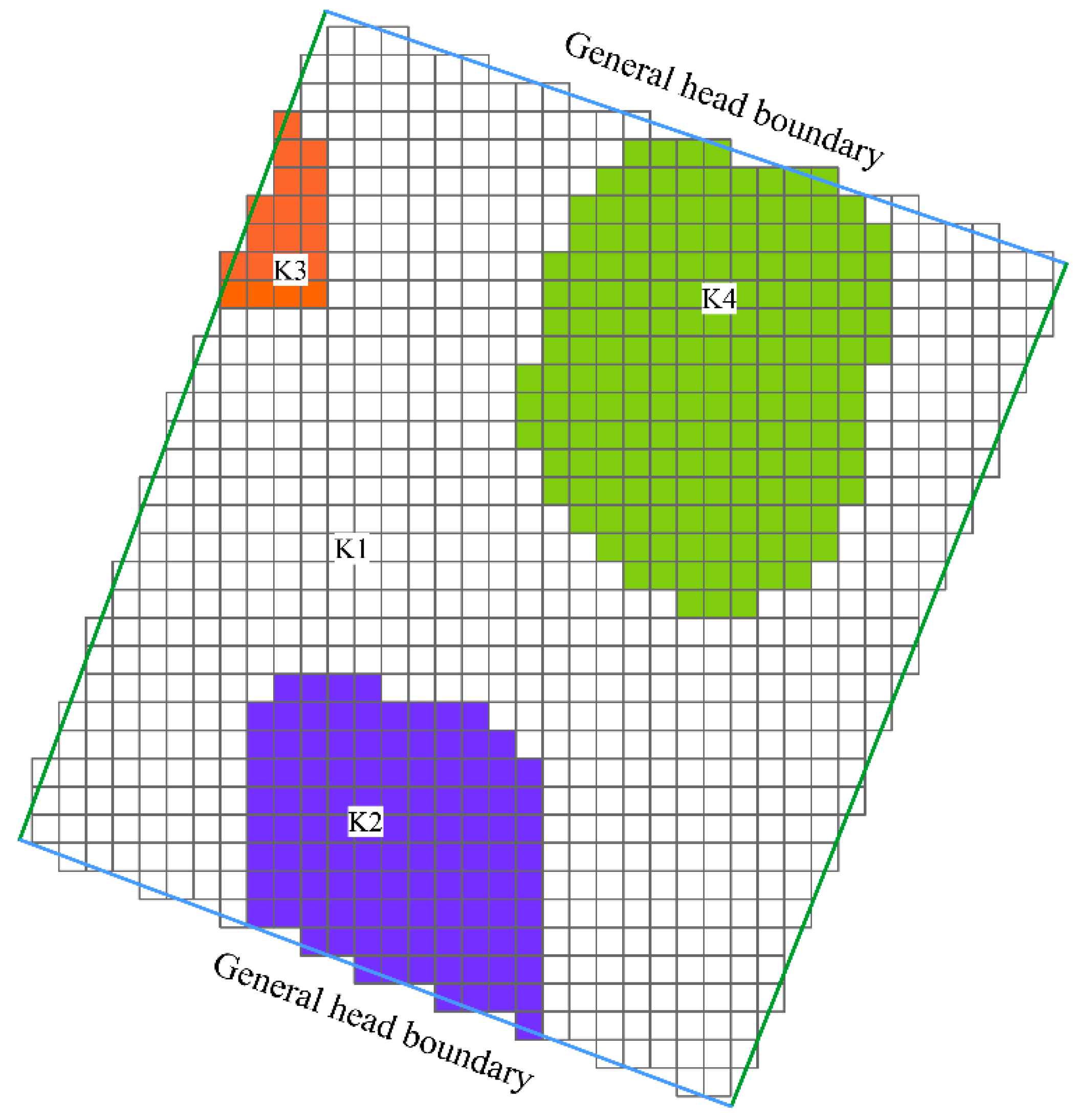
3.1. Groundwater Flow Model Parameter Optimization and Calibration
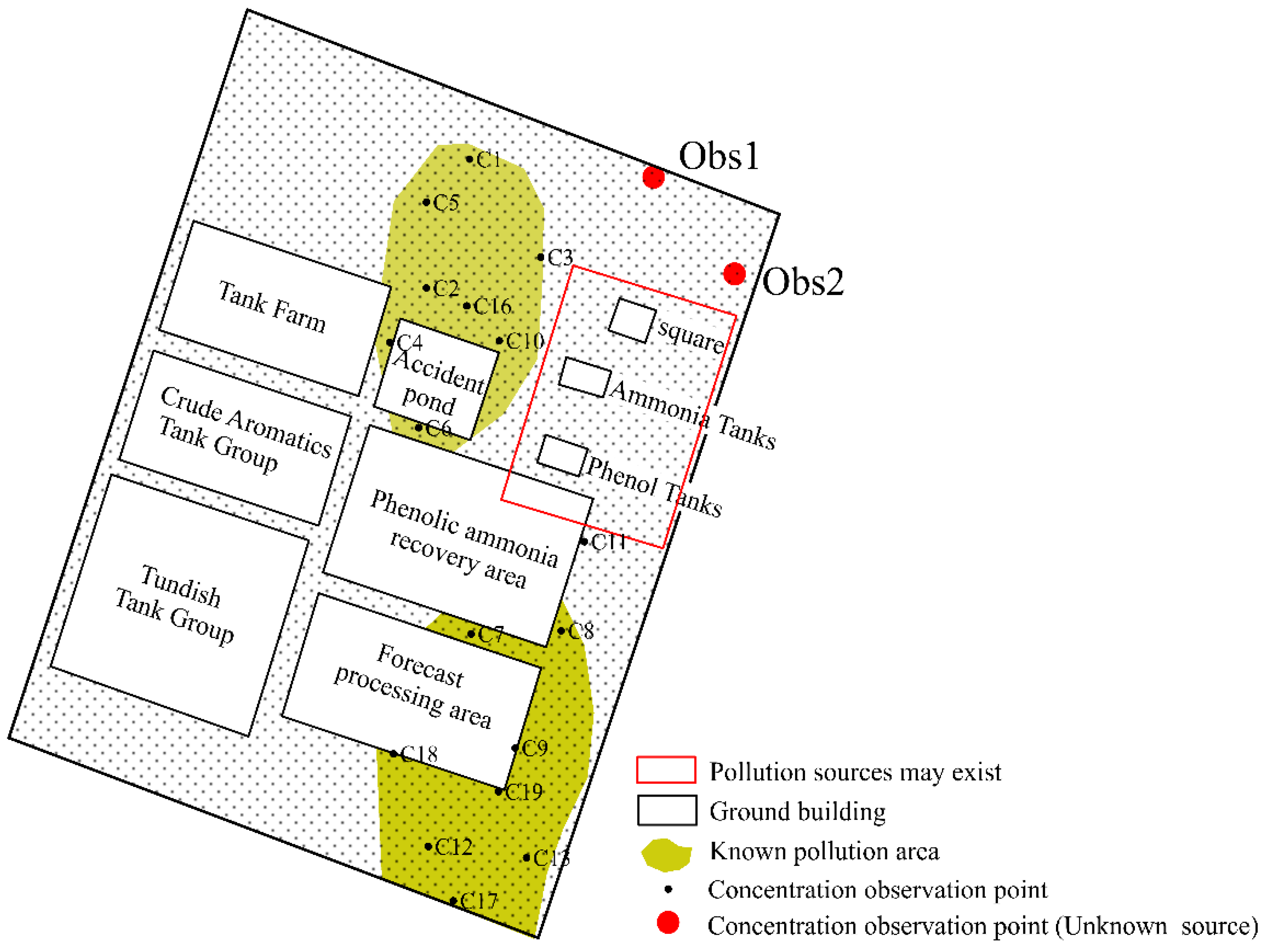
3.2. Simulation-Optimization Model for Pollutant Traceability
4. Results and Discussions
4.1. Groundwater Flow Model Optimization Results
4.2. Simulation-Optimization Model Results
5. Conclusions
- (1)
- FloPy makes it easy to build a groundwater flow model with code, while Bayesian optimization achieves better results than the manual optimization of parameters, with an R2 of 0.979. The code framework that was developed can be applied to different models with only a few parameter changes.
- (2)
- The SEGA algorithm was used to solve the groundwater pollution traceability problem by transforming it into a single-objective optimization problem with good results. This method can be easily applied to practical work because of its small amount of code, simple structure, and short time consumption.
- (3)
- The Python-based FloPy library greatly reduces the difficulty of automatic inversion of groundwater pollution traceability. This will effectively promote the application of complex theoretical methods to practical problems. It allows for traditional numerical models to be more simply and effectively combined with new numerical techniques, thereby breaking through the limitations of traditional commercial software and further promoting the development of the numerical groundwater simulation field.
- (4)
- Based on FloPy and Bayesian optimization algorithms, the SEGA algorithm can construct a tightly coupled groundwater solute transport model in the chemical park, aiming at the location of the pollution source to find the source of heavy metal manganese leakage from the perspective of preventing industrial wastewater leakage and protecting groundwater. Compared with the traditional water chemistry characterization method and isotope technology, the application is efficient and flexible, and the calculation can reason the pollution situation in the forward direction, which can make a more accurate judgment on the source of pollutants.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Konikow, L.F. Role of numerical simulation in analysis of ground-water quality problems. Sci. Total Environ. 1981, 21, 299–312. [Google Scholar] [CrossRef]
- Langevin, C.D.; Panday, S. Future of Groundwater Modeling. Groundwater 2012, 50, 333–339. [Google Scholar] [CrossRef]
- McDonald, M.G.; Harbaugh, A.W.; Geological Survey (U.S.). A modular Three-Dimensional Finite-Difference Ground-Water Flow Model; Scientific Publications Co. Distributor: Washington, DC, USA, 1984; p. vi. 528p.
- Sundar, M.L.; Ragunath, S.; Hemalatha, J.; Vivek, S.; Mohanraj, M.; Sampathkumar, V.; Ansari, A.M.S.; Parthiban, V.; Manoj, S. Simulation of ground water quality for noyyal river basin of Coimbatore city, Tamilnadu using MODFLOW. Chemosphere 2022, 306, 135649. [Google Scholar] [CrossRef]
- Bo, Q.Y.; Cheng, W.Q.; Sun, T. Groundwater Simulation Model for Baohe River in the Upper Reaches of Baiyangdian Lake Based on Groundwater Simulation Software (Gms). J. Environ. Prot. Ecol. 2021, 22, 1162–1174. [Google Scholar]
- Yang, Y.; Zhu, Y.; Wu, J.W.; Mao, W.; Ye, M.; Yang, J.Z. Development and application of a new package for MODFLOW-LGR-MT3D for simulating regional groundwater and salt dynamics with subsurface drainage systems. Agric. Water Manag. 2022, 260, 107330. [Google Scholar] [CrossRef]
- Morway, E.D.; Langevin, C.D.; Hughes, J.D. Use of the MODFLOW 6 Water Mover Package to Represent Natural and Managed Hydrologic Connections. Groundwater 2021, 59, 913–924. [Google Scholar] [CrossRef] [PubMed]
- Pietrzak, D. Modeling migration of organic pollutants in groundwater—Review of available software. Environ. Model. Softw. 2021, 144, 105145. [Google Scholar] [CrossRef]
- Xu, Z.P.; Zhou, X.; Chen, R.G.; Shen, Y.; Shang, Z.Q.; Hai, K. Numerical Simulation of Deep Thermal Groundwater Exploitation in the Beijing Plain Area. Water 2019, 11, 1494. [Google Scholar] [CrossRef]
- Banaei, S.M.A.; Javid, A.H.; Hassani, A.H. Numerical simulation of groundwater contaminant transport in porous media. Int. J. Environ. Sci. Technol. 2021, 18, 151–162. [Google Scholar] [CrossRef]
- Seyf-Laye, A.-S.M.; Mingzhu, L.; Djanéyé-Bouindjou, G.; Fei, L.; Lyutsiya, K.; Moctar, B.L.; Honghan, C. Groundwater flow and contaminant transport modeling applications in urban area: Scopes and limitations. Environ. Sci. Pollut. Res. 2012, 19, 1981–1993. [Google Scholar] [CrossRef]
- Ben Simon, R.; Bernard, S.; Meurville, C.; Rebour, V. Flow-Through Stream Modeling with MODFLOW and MT3D: Certainties and Limitations. Groundwater 2015, 53, 967–971. [Google Scholar] [CrossRef] [PubMed]
- Kumar, C. An overview of commonly used groundwater modelling software. Int. J. Adv. Sci. Eng. Technol. 2019, 6, 7854–7865. [Google Scholar]
- Tabari, M.M.R.; Eilbeigi, M.; Chitsazan, M. Multi-objective optimal model for sustainable management of groundwater resources in an arid and semiarid area using a coupled optimization-simulation modeling. Environ. Sci. Pollut. Res. 2022, 29, 22179–22202. [Google Scholar] [CrossRef] [PubMed]
- Matott, L.S.; Leung, K.; Sim, J. Application of MATLAB and Python optimizers to two case studies involving groundwater flow and contaminant transport modeling. Comput. Geosci. 2011, 37, 1894–1899. [Google Scholar] [CrossRef]
- Bakker, M.; Post, V.; Langevin, C.D.; Hughes, J.D.; White, J.T.; Starn, J.J.; Fienen, M.N. Scripting MODFLOW Model Development Using Python and FloPy. Groundwater 2016, 54, 733–739. [Google Scholar] [CrossRef]
- Rahmati, O.; Moghaddam, D.D.; Moosavi, V.; Kalantari, Z.; Samadi, M.; Lee, S.; Tien Bui, D. An automated python language-based tool for creating absence samples in groundwater potential mapping. Remote Sens. 2019, 11, 1375. [Google Scholar] [CrossRef]
- Bakker, M.; Post, V.; Hughes, J.; Langevin, C.; Francés, A.P.; White, J. Enhanced FloPy scripts for constructing and running MODFLOW-based models. In Proceedings of the MODFLOW and More 2013: Translating Science and Practice, Golden, CO, USA, 2–5 June 2013. [Google Scholar]
- Foglia, L.; Borsi, I.; Mehl, S.; De Filippis, G.; Cannata, M.; Vasquez-Sune, E.; Criollo, R.; Rossetto, R. FREEWAT, a free and open source, GIS-integrated, hydrological modeling platform. Groundwater 2018, 56, 521–523. [Google Scholar] [CrossRef]
- De Smet, S. The Effect of Brackish Water Extraction on the Brackish Upconing Below the Horstermeer Polder: Creating a 3D Regional Variable-Density Groundwater Model using MODFLOW 6 and FloPy. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2021. [Google Scholar]
- J-Y, J.; YN, J. Groundwater Simulation Optimization Model Based on FloPy and NSGA-III. Water Resour. Power 2021, 39, 2. [Google Scholar]
- Wei, Y.; Chen, J.; Zhang, D.; Li, L. Application and Research Progress of Python in Groundwater Numerical Simulation. Comput. Technol. Dev. 2021, 31, 150–156. (In Chinese) [Google Scholar]
- Li, B.; Lu, Y.; Li, J.; Jiang, H.; Wang, Y. Exploring the spatial-temporal variations and policy-based driving force behind groundwater contamination and remediation research in past decades. Environ. Sci. Pollut. Res. 2021, 28, 13188–13201. [Google Scholar] [CrossRef]
- Milnes, E.; Perrochet, P. Simultaneous identification of a single pollution point-source location and contamination time under known flow field conditions. Adv. Water Resour. 2007, 30, 2439–2446. [Google Scholar] [CrossRef]
- Wang, X.; Xu, Y.J.; Zhang, L. Watershed scale spatiotemporal nitrogen transport and source tracing using dual isotopes among surface water, sediments and groundwater in the Yiluo River Watershed, Middle of China. Sci. Total Environ. 2022, 833, 155180. [Google Scholar] [CrossRef]
- Li, J.; Wu, Z.; He, H.; Lu, W. Comparative analysis of groundwater contaminant sources identification based on simulation optimization and ensemble Kalman filter. Environ. Sci. Pollut. Res. 2022, 29, 90081–90097. [Google Scholar] [CrossRef] [PubMed]
- Yao, L.; Guo, Y. Hybrid algorithm for parameter estimation of the groundwater flow model with an improved genetic algorithm and gauss-newton method. J. Hydrol. Eng. 2014, 19, 482–494. [Google Scholar] [CrossRef]
- Huang, L.; Wang, L.; Zhang, Y.; Xing, L.; Hao, Q.; Xiao, Y.; Yang, L.; Zhu, H. Identification of groundwater pollution sources by a SCE-UA algorithm-based simulation/optimization model. Water 2018, 10, 193. [Google Scholar] [CrossRef]
- Chakraborty, A.; Prakash, O. Identification of clandestine groundwater pollution sources using heuristics optimization algorithms: A comparison between simulated annealing and particle swarm optimization. Environ. Monit. Assess. 2020, 192, 791. [Google Scholar] [CrossRef]
- Wu, M.; Wang, L.; Xu, J.; Wang, Z.; Hu, P.; Tang, H. Multiobjective ensemble surrogate-based optimization algorithm for groundwater optimization designs. J. Hydrol. 2022, 612, 128159. [Google Scholar] [CrossRef]
- Kontos, Y.N.; Kassandros, T.; Perifanos, K.; Karampasis, M.; Katsifarakis, K.L.; Karatzas, K. Machine learning for groundwater pollution source identification and monitoring network optimization. Neural Comput. Appl. 2022, 34, 19515–19545. [Google Scholar] [CrossRef]
- Greenhill, S.; Rana, S.; Gupta, S.; Vellanki, P.; Venkatesh, S. Bayesian optimization for adaptive experimental design: A review. IEEE Access 2020, 8, 13937–13948. [Google Scholar] [CrossRef]
- Pan, Z.; Lu, W.; Fan, Y.; Li, J. Identification of groundwater contamination sources and hydraulic parameters based on bayesian regularization deep neural network. Environ. Sci. Pollut. Res. 2021, 28, 16867–16879. [Google Scholar] [CrossRef]
- Jones, D.R. A taxonomy of global optimization methods based on response surfaces. J. Glob. Optim. 2001, 21, 345–383. [Google Scholar] [CrossRef]
- Chaudhuri, A.; Haftka, R.T. Efficient global optimization with adaptive target setting. AIAA J. 2014, 52, 1573–1578. [Google Scholar] [CrossRef]
- Jayaram, M.; Nataraja, M.; Ravikumar, C. Elitist genetic algorithm models: Optimization of high performance concrete mixes. Mater. Manuf. Process. 2009, 24, 225–229. [Google Scholar] [CrossRef]
- Michalewicz, Z.; Schoenauer, M. Evolutionary algorithms for constrained parameter optimization problems. Evol. Comput. 1996, 4, 1–32. [Google Scholar] [CrossRef]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef]
- Sivanandam, S.; Deepa, S. Genetic algorithms. In Introduction to Genetic Algorithms; Springer: Berlin/Heidelberg, Germany, 2008; pp. 15–37. [Google Scholar]
- Saini, N. Review of selection methods in genetic algorithms. Int. J. Eng. Comput. Sci. 2017, 6, 22261–22263. [Google Scholar]
- Jebari, K.; Madiafi, M. Selection methods for genetic algorithms. Int. J. Emerg. Sci. 2013, 3, 333–344. [Google Scholar]
- Jazzbin. Geatpy: The Genetic and Evolutionary Algorithm Toolbox with High Performance in Python. Available online: http://www.geatpy.com/ (accessed on 9 January 2022).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value/Range |
|---|---|
| Hydraulic conductivity (m·d−1) | 0.01~15 |
| Specific yield (%) | 0.2 |
| Longitudinal dispersivity (m) | 20 |
| Horizontal dispersivity (m) | 4 |
| Pollution source concentration (mg·L−1) | 500~9000 |
| The pollution sources leaking time (d) | 1~1000 |
| Parameters | Value |
|---|---|
| Encoding | Real integer encoding (RI) |
| Number of individuals | 30 |
| Maximum number of generations | 100 |
| trappedValue | 0.000001 |
| maxTrappedCount | 10 |
| Parameters | Value |
|---|---|
| R2 | 0.979 |
| K1 | 0.727 |
| K2 | 2.510 |
| K3 | 0.550 |
| K4 | 11.590 |
| Parameters | Value |
|---|---|
| x1 | 19 |
| x2 | 28 |
| x3 (mg·L−1) | 6631 |
| x4 (d) | 2000 |
| x5/(d) | 354 |
| Evaluation number | 1350 |
| Execution time (s) | 411 |
| Best objective value | 0.35 |
| Total number of generations | 45 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Wang, W.; Li, J.; Jiao, Y.; Li, Y.; Liu, P. A Novel Simulation-Optimization Model Built by FloPy: Pollutant Traceability in a Chemical Park in China. Appl. Sci. 2023, 13, 10707. https://doi.org/10.3390/app131910707
Liu Y, Wang W, Li J, Jiao Y, Li Y, Liu P. A Novel Simulation-Optimization Model Built by FloPy: Pollutant Traceability in a Chemical Park in China. Applied Sciences. 2023; 13(19):10707. https://doi.org/10.3390/app131910707
Chicago/Turabian StyleLiu, Yitian, Wei Wang, Jianhua Li, Yiwen Jiao, Yujiao Li, and Peng Liu. 2023. "A Novel Simulation-Optimization Model Built by FloPy: Pollutant Traceability in a Chemical Park in China" Applied Sciences 13, no. 19: 10707. https://doi.org/10.3390/app131910707