
Research Progress of Dynamic Measurement Technology of Atom Gravimeter
Abstract
:1. Introduction
2. Dynamic Measuring Principle and Device of Atom Gravimeter
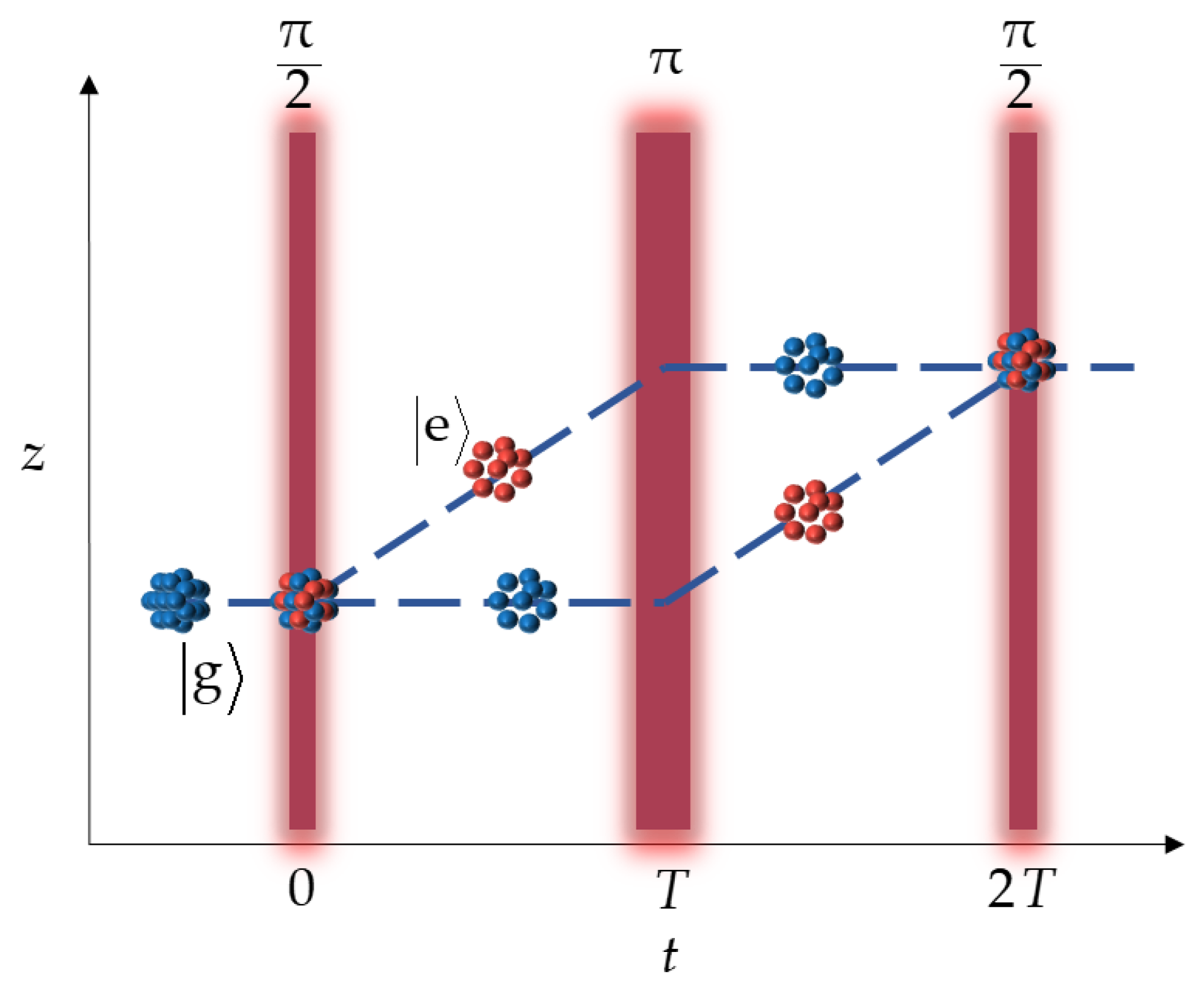
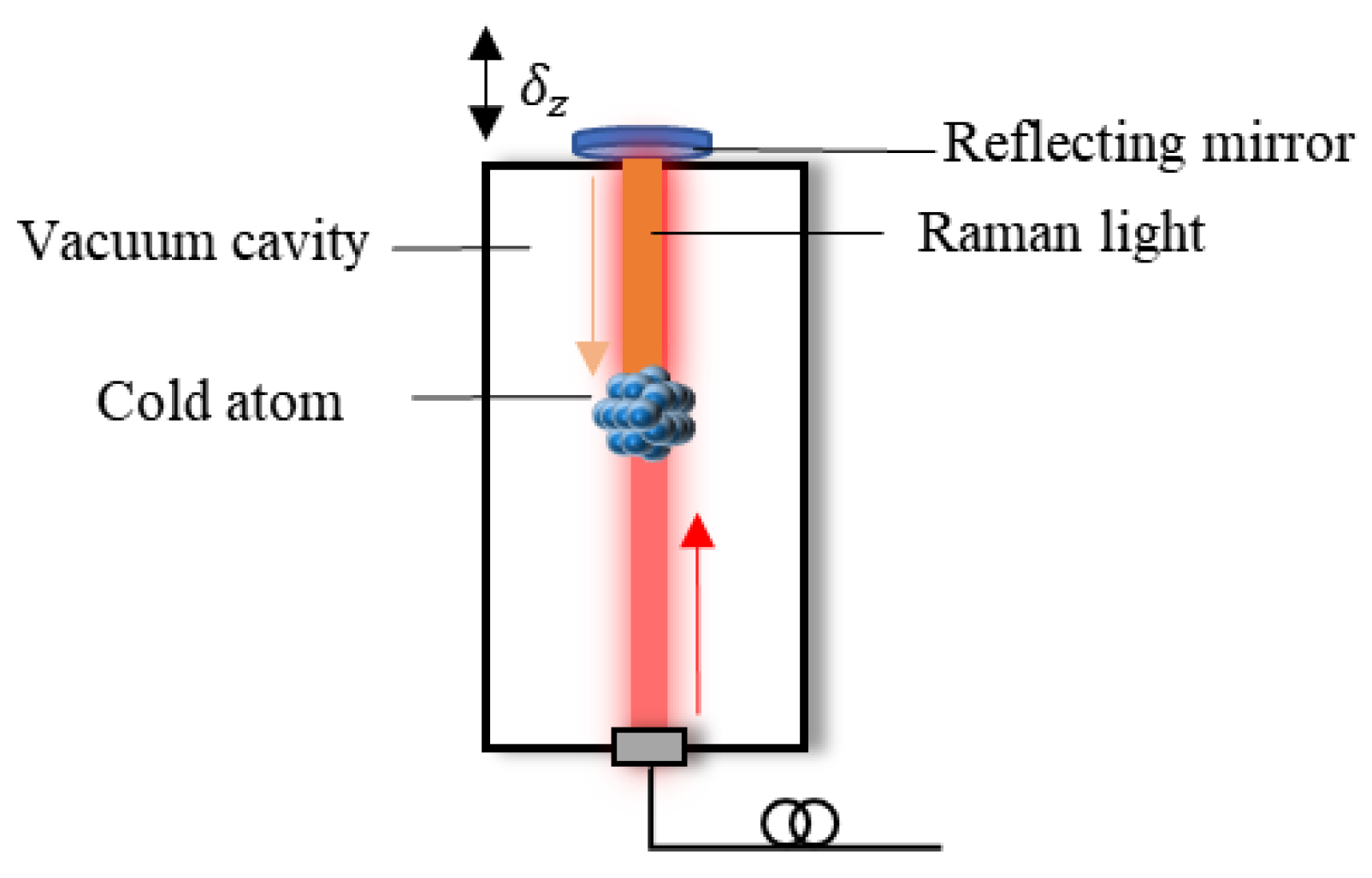
2.1. Basic Principles of Atom Gravimeter
2.2. Dynamic Measurement Principle of Atom Gravimeter
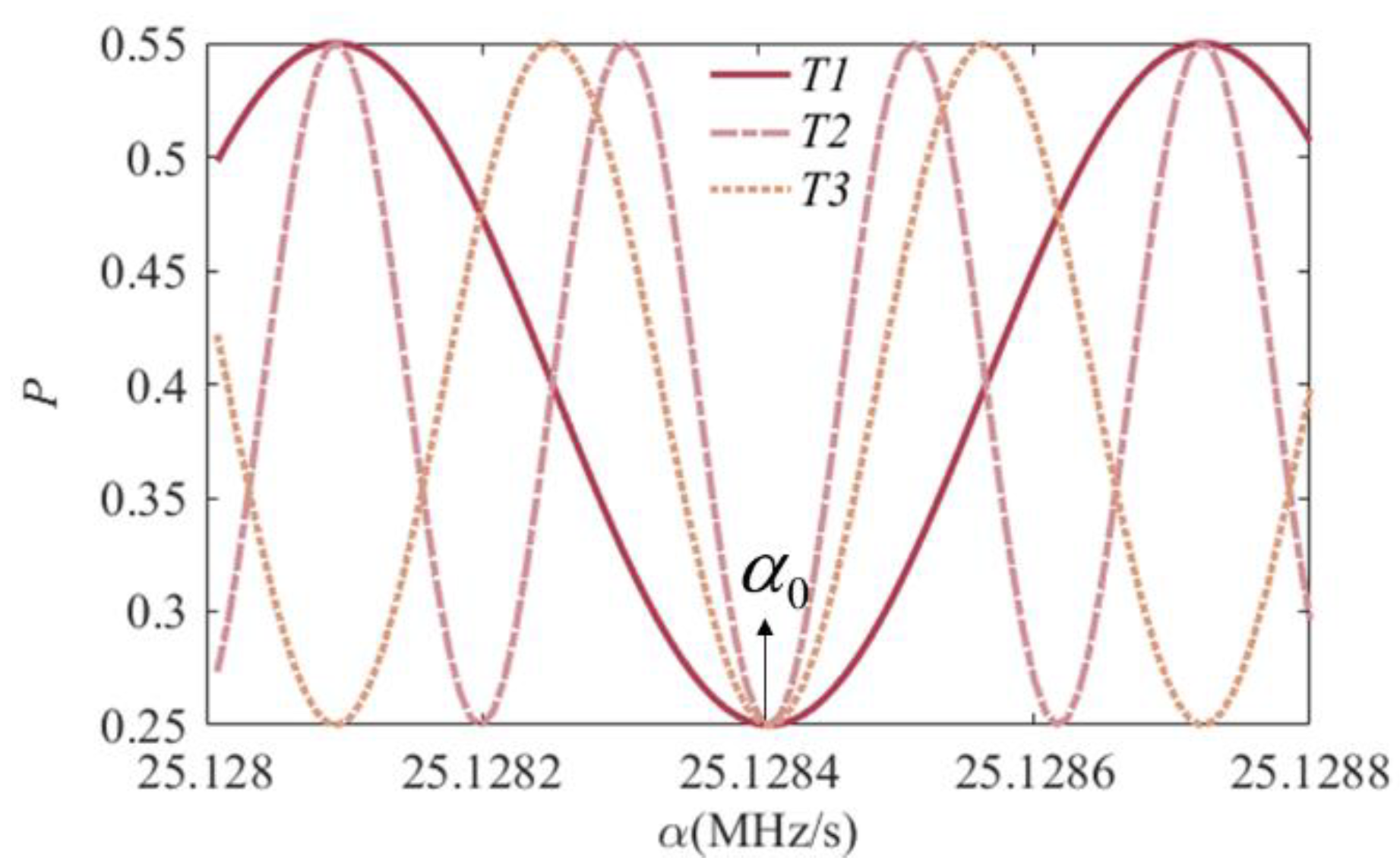
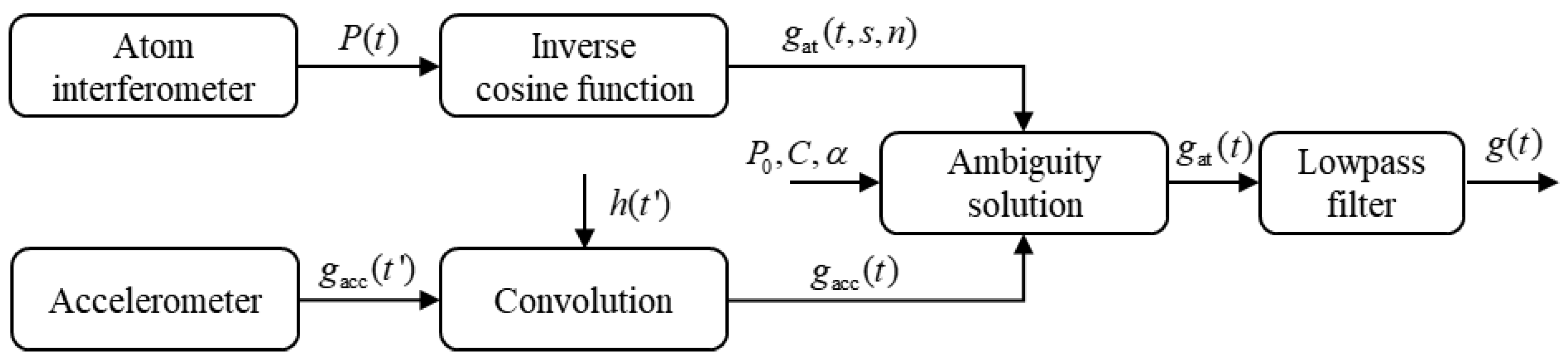
2.2.1. Coarse-Fine Combination
2.2.2. Kalman Filter
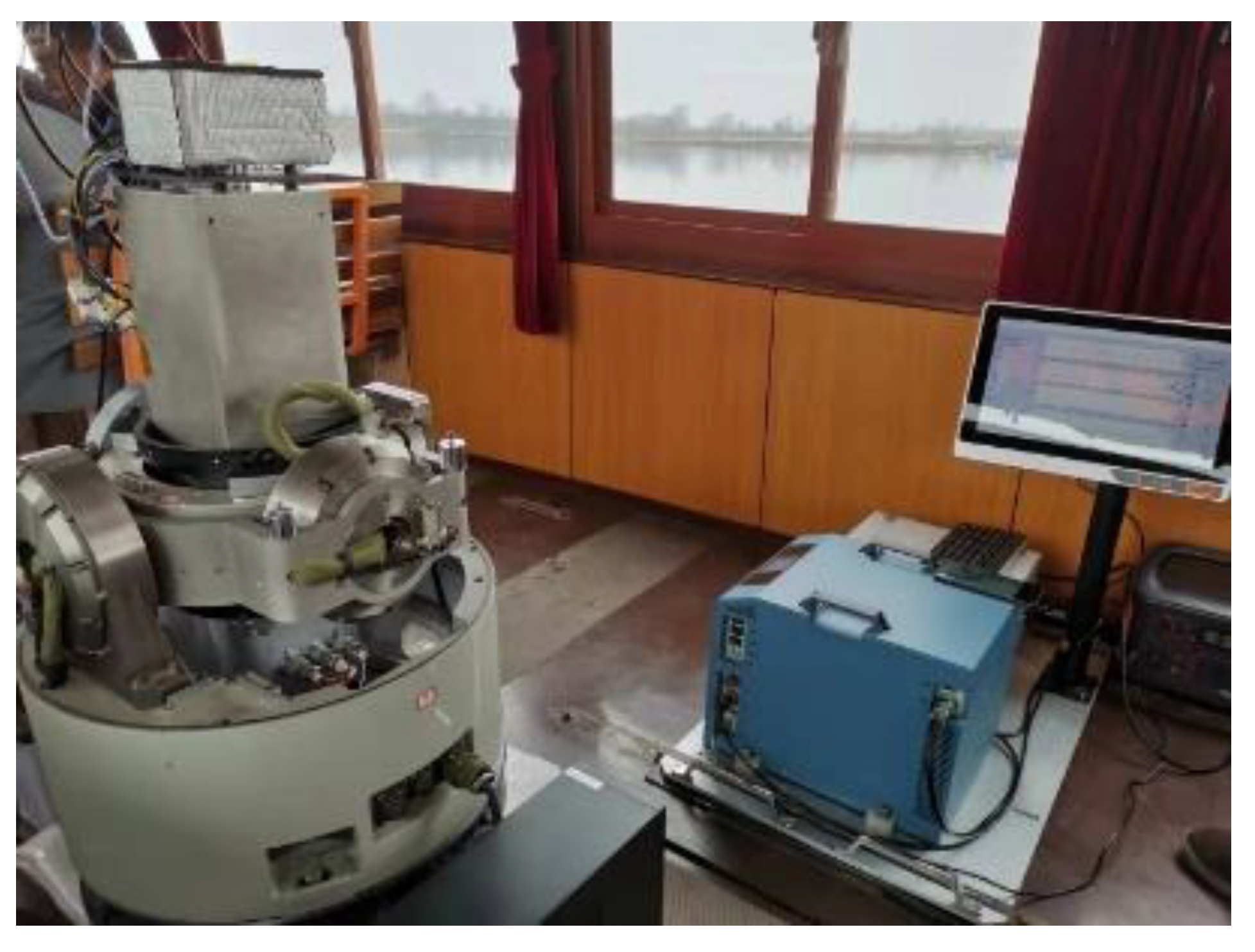
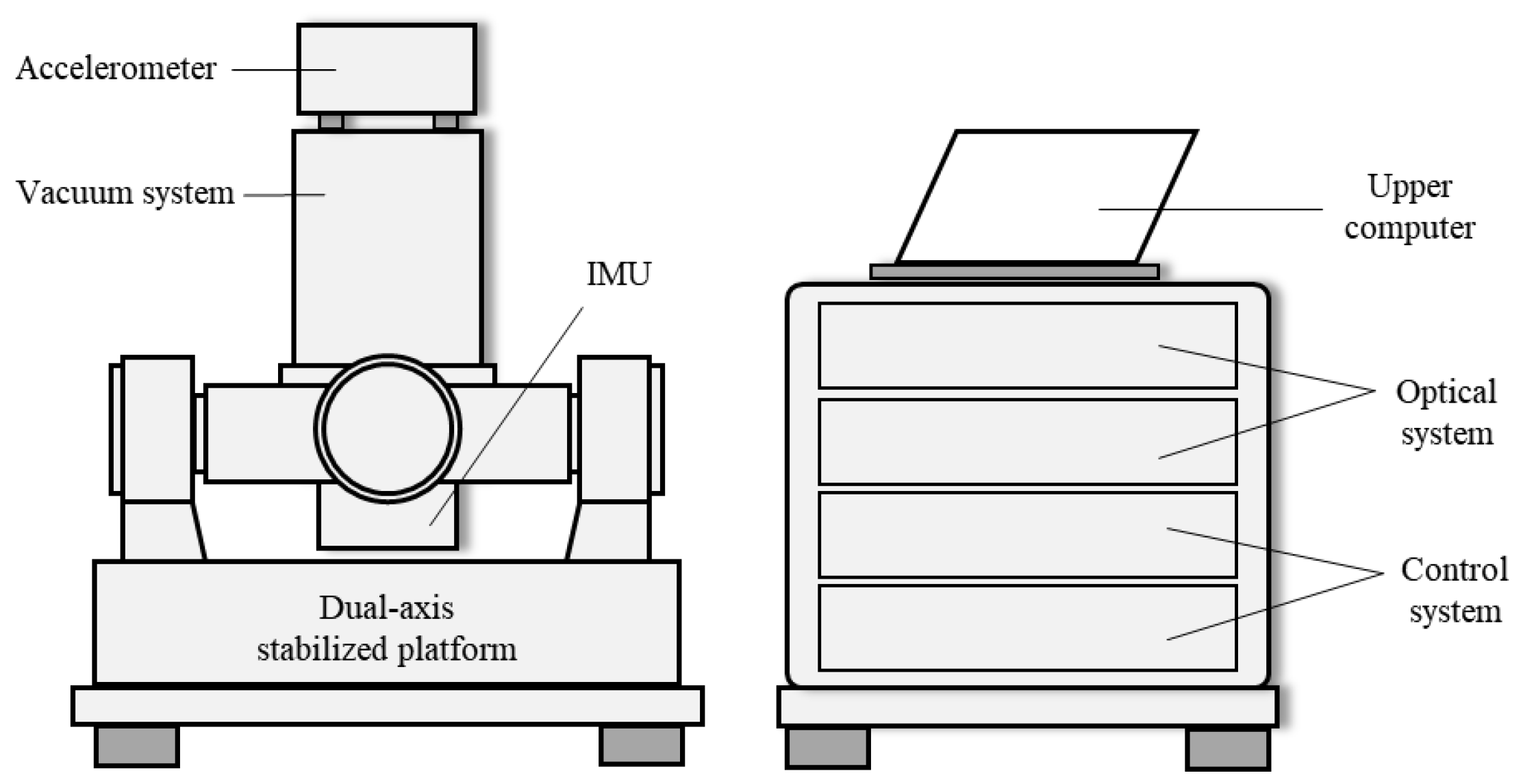
2.3. Dynamic Measurement Device of Atom Gravimeter
3. Main Error Sources and Suppression Methods of Dynamic Measurement
3.1. Vibration Noise
3.2. Error from Accelerometer
3.3. Dynamic Effect of the Carrier
3.3.1. Eötvös Effect
3.3.2. Horizontal Acceleration
4. Application Direction of Dynamic Measurement
4.1. Gravity Field Mapping
4.2. Navigation
4.3. Target Detection
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kasevich, M.; Chu, S. Atomic interferometry using stimulated Raman transitions. Phys. Rev. Lett. 1991, 67, 181–184. [Google Scholar] [CrossRef] [PubMed]
- Canuel, B.; Leduc, F.; Holleville, D.; Gauguet, A.; Fils, J.; Virdis, A.; Clairon, A.; Dimarcq, N.; Borde Ch, J.; Landragin, A.; et al. Six-axis inertial sensor using cold-atom interferometry. Phys. Rev. Lett. 2006, 97, 010402. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gustavson, T.L.; Bouyer, P.; Kasevich, M.A. Precision Rotation Measurements with an Atom Interferometer Gyroscope. Phys. Rev. Lett. 1997, 78, 2046–2049. [Google Scholar] [CrossRef] [Green Version]
- Lamporesi, G.; Bertoldi, A.; Cacciapuoti, L.; Prevedelli, M.; Tino, G.M. Determination of the Newtonian Gravitational Constant Using Atom Interferometry. Phys. Rev. Lett. 2008, 100, 050801. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cladé, P.; de Mirandes, E.; Cadoret, M.; Guellati-Khélifa, S.; Schwob, C.; Nez, F.; Julien, L.; Biraben, F. Determination of the Fine Structure Constant Based on Bloch Oscillations of Ultracold Atoms in a Vertical Optical Lattice. Phys. Rev. Lett. 2006, 96, 033001. [Google Scholar] [CrossRef] [Green Version]
- Chaibi, W.; Geiger, R.; Canuel, B.; Bertoldi, A.; Landragin, A.; Bouyer, P. Low frequency gravitational wave detection with ground-based atom interferometer arrays. Phys. Rev. D 2016, 93, 021101. [Google Scholar] [CrossRef] [Green Version]
- Dimopoulos, S.; Graham, P.W.; Hogan, J.M.; Kasevich, M.A. Testing General Relativity with Atom Interferometry. Phys. Rev. Lett. 2007, 98, 111102. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Geiger, R. Future Gravitational Wave Detectors Based on Atom Interferometry. In An Overview of Gravitational Waves; World Scientific: Toh Tuck, Singapore, 2016; pp. 285–313. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.Y.; Chen, L.L.; Cheng, Y.; Luo, Q.; Shu, Y.B.; Duan, X.C.; Zhou, M.K.; Hu, Z.K. Movable precision gravimeters based on cold atom interferometry. Chin. Phys. 2020, 29, 093702. [Google Scholar] [CrossRef]
- Wu, S.Q.; Li, T.C. The Technical Development of Absolute Gravimeter: Laser Interferometry and Atom Interferomery. Acta Opt. Sin. 2021, 41, 44–59. [Google Scholar] [CrossRef]
- Geiger, R.; Ménoret, V.; Stern, G.; Zahzam, N.; Cheinet, P.; Battelier, B.; Villing, A.; Moron, F.; Lours, M.; Bidel, Y.; et al. Detecting inertial effects with airborne matter-wave interferometry. Nat. Commun. 2011, 2, 474. [Google Scholar] [CrossRef] [Green Version]
- Geiger, R.; Landragin, A.; Merlet, S.; Santos, F.P.D. High-accuracy inertial measurements with cold-atom sensors. AVS Quant. Sci. 2020, 2, 024702. [Google Scholar] [CrossRef]
- Peters, A.; Chung, K.Y.; Chu, S. High-precision gravity measurements using atom interferometry. Metrologia 2001, 38, 25–61. [Google Scholar] [CrossRef]
- Muller, H.; Chiow, S.W.; Herrmann, S.; Chu, S.; Chung, K.Y. Atom-interferometry tests of the isotropy of post-Newtonian gravity. Phys. Rev. Lett. 2008, 100, 031101. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhou, M.K.; Hu, Z.K.; Duan, X.C.; Sun, B.L.; Zhao, J.B.; Luo, J. Experimental progress in gravity measurement with an atom interferometer. Front. Phys. China 2009, 4, 170. [Google Scholar] [CrossRef]
- Hu, Z.K.; Sun, B.L.; Duan, X.C.; Zhou, M.K.; Chen, L.L.; Zhan, S.; Zhang, Q.Z.; Luo, J. Demonstration of an ultrahigh-sensitivity atom-interferometry absolute gravimeter. Phys. Rev. A 2013, 88, 043610. [Google Scholar] [CrossRef]
- Bidel, Y.; Carraz, O.; Charrière, R.; Cadoret, M.; Zahzam, N.; Bresson, A. Compact cold atom gravimeter for field applications. Appl. Phys. Lett. 2013, 102, 144107. [Google Scholar] [CrossRef] [Green Version]
- Gillot, P.; Francis, O.; Landragin, A.; Pereira Dos Santos, F.; Merlet, S. Stability comparison of two absolute gravimeters: Optical versus atomic interferometers. Metrologia 2014, 51, L15–L17. [Google Scholar] [CrossRef] [Green Version]
- Fang, B.; Dutta, I.; Gillot, P.; Savoie, D.; Lautier, J.; Cheng, B.; Alzar, C.; Geiger, R.; Merlet, S.; Pereira dos Santos, F.; et al. Metrology with Atom Interferometry: Inertial Sensors from Laboratory to Field Applications. J. Phys. Conf. Ser. 2016, 723, 012049. [Google Scholar] [CrossRef]
- Gillot, P.; Cheng, B.; Imanaliev, A.; Merlet, S.; Santos, F.P.D. The LNE-SYRTE cold atom gravimeter. In Proceedings of the 2016 European Frequency and Time Forum (EFTF), York, UK, 4–7 April 2016; pp. 1–3. [Google Scholar]
- Freier, C.; Hauth, M.; Schkolnik, V.; Leykauf, B.; Schilling, M.; Wziontek, H.; Scherneck, H.-G.; Müller, J.; Peters, A. Mobile quantum gravity sensor with unprecedented stability. J. Phys. Conf. Ser. 2015, 723, 012050. [Google Scholar] [CrossRef]
- Wu, X.; Pagel, Z.; Malek, B.S.; Nguyen, T.H.; Zi, F.; Scheirer, D.S.; Müller, H. Gravity surveys using a mobile atom interferometer. Sci. Adv. 2019, 5, eaax0800. [Google Scholar] [CrossRef] [Green Version]
- Huang, P.W.; Tang, B.; Chen, X.; Zhong, J.Q.; Xiong, Z.Y.; Zhou, L.; Wang, J.; Zhan, M.S. Accuracy and stability evaluation of the 85Rb atom gravimeter WAG-H5-1 at the 2017 International Comparison of Absolute Gravimeters. Metrologia 2019, 56, 045012. [Google Scholar] [CrossRef]
- Zhang, X.; Zhong, J.; Tang, B.; Chen, X.; Zhu, L.; Huang, P.; Wang, J.; Zhan, M. Compact portable laser system for mobile cold atom gravimeters. Appl. Opt. 2018, 57, 6545–6551. [Google Scholar] [CrossRef]
- Fu, Z.; Wang, Q.; Wang, Z.; Wu, B.; Cheng, B.; Lin, Q. Participation in the absolute gravity comparison with a compact cold atom gravimeter. Chin. Opt. Lett. 2019, 17, 011204. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.K.; Zhao, Y.; Zhuang, W.; Li, T.C.; Wu, S.Q.; Feng, J.Y.; Li, C.J. Shift evaluation of the atomic gravimeter NIM-AGRb-1 and its comparison with FG5X. Metrologia 2018, 55, 360–365. [Google Scholar] [CrossRef]
- Bodart, Q.; Merlet, S.; Malossi, N.; Dos Santos, F.P.; Bouyer, P.; Landragin, A. A cold atom pyramidal gravimeter with a single laser beam. App. Phys. Lett. 2010, 96, 134101. [Google Scholar] [CrossRef]
- Hinton, A.; Perea-Ortiz, M.; Winch, J.; Briggs, J.; Freer, S.; Moustoukas, D.; Powell-Gill, S.; Squire, C.; Lamb, A.; Rammeloo, C.; et al. A portable magneto-optical trap with prospects for atom interferometry in civil engineering. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2017, 375, 20160238. [Google Scholar] [CrossRef] [Green Version]
- Wu, B.; Wang, Z.; Cheng, B.; Wang, Q.; Xu, A.; Lin, Q. The investigation of a μGal-level cold atom gravimeter for field applications. Metrologia 2014, 51, 452–458. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, Z.; Fu, Z.; Liu, W.; Lin, Q. A compact laser system for the cold atom gravimeter. Opt. Commun. 2016, 358, 82–87. [Google Scholar] [CrossRef]
- Wu, B.; Zhou, Y.; Cheng, B.; Zhu, D.; Wang, K.-N.; Zhu, X.-X.; Chen, P.-J.; Weng, K.-X.; Yang, Q.-H.; Lin, J.-H.; et al. Static measurement of absolute gravity in truck based on atomic gravimeter. Acta Phys. Sin. 2020, 69, 25–32. [Google Scholar] [CrossRef]
- Zhang, J.Y.; Xu, W.J.; Sun, S.D.; Shu, Y.B.; Luo, Q.; Cheng, Y.; Hu, Z.K.; Zhou, M.K. A car-based portable atom gravimeter and its application in field gravity survey. AIP Adv. 2021, 11, 115223. [Google Scholar] [CrossRef]
- Mahadeswaraswamy, C. Atom Interferometric Gravity Gradiometer: Disturbance Compensation and Mobile Gradiometry; Stanford University: Stanford, CA, USA, 2009. [Google Scholar]
- Cheng, B.; Chen, P.J.; Zhou, Y.; Wang, K.N.; Zhu, D.; Chu, L.; Weng, K.X.; Wang, H.L.; Peng, S.P.; Wang, X.R.; et al. The research on the experiment of dynamic absolute gravity measurement based on cold atom gravimeter. Acta Phys. Sin. 2022, 71, 247–257. [Google Scholar] [CrossRef]
- Bidel, Y.; Zahzam, N.; Blanchard, C.; Bonnin, A.; Cadoret, M.; Bresson, A.; Rouxel, D.; Lequentrec-Lalancette, M.F. Absolute marine gravimetry with matter-wave interferometry. Nat. Commun. 2018, 9, 627. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bidel, Y.; Zahzam, N.; Bresson, A.; Blanchard, C.; Cadoret, M.; Olesen, A.V.; Forsberg, R. Absolute airborne gravimetry with a cold atom sensor. J. Geod. 2020, 94, 20. [Google Scholar] [CrossRef] [Green Version]
- Bidel, Y.; Zahzam, N.; Bresson, A.; Blanchard, C.; Bonnin, A.; Bernard, J.; Cadoret, M.; Jensen, T.E.; Forsberg, R.; Salaun, C.; et al. Airborne absolute gravimetry with a quantum sensor, comparison with classical technologies. J. Geophys. Res. Solid Earth 2023, 128, e2022JB025921. [Google Scholar] [CrossRef]
- Zhu, D.; Xu, H.; Zhou, Y.; Wu, B.; Cheng, B.; Wang, K.N.; Chen, P.J.; Gao, S.T.; Weng, K.X.; Wang, H.L.; et al. Data processing of shipborne absolute gravity measurement based on the extended Kalman filter algorithm. Acta Phys. Sin. 2022, 71, 159–167. [Google Scholar] [CrossRef]
- Che, H.; Li, A.; Fang, J.; Ge, G.-G.; Gao, W.; Zhang, Y.; Liu, C.; Xu, J.-N.; Chang, L.-B.; Huang, C.-F.; et al. Research on ship-mounted dynamic absolute gravity measurement based on cold atom gravimeter. Acta Phys. Sin. 2022, 71, 148–156. [Google Scholar] [CrossRef]
- Huang, C.F.; Li, A.; Qin, F.J.; Fang, J.; Chen, X. An atomic gravimeter dynamic measurement method based on Kalman filter. Meas. Sci. Technol. 2023, 34, 015013. [Google Scholar] [CrossRef]
- Fang, J. Study on Compact Atom Gravimeters. Ph.D. Thesis, Huazhong University of Science and Technology, Wuhan, China, 2019. [Google Scholar]
- Cheiney, P.; Fouché, L.; Templier, S.; Napolitano, F.; Battelier, B.; Bouyer, P.; Barrett, B. Navigation-Compatible Hybrid Quantum Accelerometer Using a Kalman Filter. Phys. Rev. Appl. 2018, 10, 034030. [Google Scholar] [CrossRef] [Green Version]
- Cheiney, P.; Barrett, B.; Templier, S.; Jolly, O.; Battelier, B.; Bouyer, P.; Porte, H.; Napolitano, F. Demonstration of a Robust Hybrid Classical/Quantum Accelerometer. In Proceedings of the 2019 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Naples, FL, USA, 1–5 April 2019; pp. 1–4. [Google Scholar]
- McGuinness, H.J.; Rakholia, A.V.; Biedermann, G.W. High data-rate atom interferometer for measuring acceleration. Appl. Phys. Lett. 2012, 100, 011106. [Google Scholar] [CrossRef] [Green Version]
- Tennstedt, B.; Schön, S. Integration of atom interferometers and inertial measurement units to improve navigation performance. In Proceedings of the 28th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), Saint Petersburg, Russia, 31 May–2 June 2021. [Google Scholar]
- Lautier, J.; Volodimer, L.; Hardin, T.; Merlet, S.; Lours, M.; Pereira Dos Santos, F.; Landragin, A. Hybridizing matter-wave and classical accelerometers. Appl. Phys. Lett. 2014, 105, 144102. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Kealy, A.; Gilliam, C.; Haine, S.; Close, J.; Moran, B.; Talbot, K.; Williams, S.; Hardman, K.; Freier, C.; et al. Enhancing Inertial Navigation Performance via Fusion of Classical and Quantum Accelerometers. arXiv 2021, arXiv:2103.09378. [Google Scholar]
- Merlet, S.; Le Gouet, J.; Bodart, Q.; Clairon, A.; Landragin, A.; Dos Santos, F.P.; Rouchon, P. Operating an atom interferometer beyond its linear range. Metrologia 2009, 46, 87–94. [Google Scholar] [CrossRef] [Green Version]
- Jimenez-Martinez, R.; Kolodynski, J.; Troullinou, C.; Lucivero, V.G.; Kong, J.; Mitchell, M.W. Signal Tracking Beyond the Time Resolution of an Atomic Sensor by Kalman Filtering. Phys. Rev. Lett. 2018, 120, 040503. [Google Scholar] [CrossRef] [Green Version]
- Wu, B.; Cheng, B.; Fu, Z.-J.; Zhu, D.; Zhou, Y.; Weng, K.-X.; Wang, X.-L.; Lin, Q. Measurement of absolute gravity based on cold atom gravimeter at large tilt angle. Acta Phys. Sin. 2018, 67, 71–81. [Google Scholar]
- Le Gouët, J.; Mehlstäubler, T.E.; Kim, J.; Merlet, S.; Clairon, A.; Landragin, A.; Pereira Dos Santos, F. Limits to the sensitivity of a low noise compact atomic gravimeter. Appl. Phys. B 2008, 92, 133–144. [Google Scholar] [CrossRef] [Green Version]
- Zhou, M.K.; Hu, Z.K.; Duan, X.C.; Sun, B.L.; Chen, L.L.; Zhang, Q.Z.; Luo, J. Performance of a cold-atom gravimeter with an active vibration isolator. Phys. Rev. A 2012, 86, 043630. [Google Scholar] [CrossRef]
- Tang, B.; Zhou, L.; Xiong, Z.; Wang, J.; Zhan, M. A programmable broadband low frequency active vibration isolation system for atom interferometry. Rev. Sci. Instrum. 2014, 85, 093109. [Google Scholar] [CrossRef] [PubMed]
- Luo, D.Y.; Cheng, B.; Zhou, Y.; Wu, B.; Wang, X.; Lin, Q. Ultra-low frequency active vibration control for cold atom gravimeter based on sliding-mode robust algorithm. Acta Phys. Sin. 2018, 67, 82–87. [Google Scholar]
- Richardson, L.L. Inertial Noise Post-Correction in Atom Interferometers Measuring the Local Gravitational Acceleration. Ph.D. Thesis, Leibniz University Hannover, Hannover, Germany, 2019. [Google Scholar]
- Titan. Available online: https://nanometrics.ca/products/accelerometers/titan (accessed on 20 June 2022).
- Yao, J.-M.; Zhuang, W.; Feng, J.-Y.; Wang, Q.-Y.; Zhao, Y.; Wang, S.-K.; Wu, S.-Q.; Li, T.-C. A coefficient searching based vibration correction method. Acta Phys. Sin. 2022, 71, 407–423. [Google Scholar] [CrossRef]
- Gong, W.; Li, A.; Luo, J.; Che, H.; Ma, J.; Qin, F. A Vibration Compensation Approach for Atom Gravimeter Based on Improved Sparrow Search Algorithm. IEEE Sens. J. 2023, 23, 5911–5919. [Google Scholar] [CrossRef]
- Huang, M.T.; Ning, J.S.; Ouyang, Y.Z.; Liu, M.; Lu, X.P.; Zhai, G.J.; Deng, K.L. Test and equivalent verification of gravity correction models for platform tilt in sea-borne and air-borne gravimeter. Geom. Infor. Sci. Wuhan Uni. 2016, 41, 738–744. [Google Scholar] [CrossRef]
- Liu, M.; Huang, M.T.; Ma, Y.Y.; Ouyang, Y.Z.; Deng, K.L.; Lu, X.P.; Zhai, G.J. A modified correction model for platform tilt in air-sea-borne gravimetry. Geom. Infor. Sci. Wuhan Uni. 2018, 43, 586–591. [Google Scholar] [CrossRef]
- Fu, Z.; Wu, B.; Cheng, B.; Zhou, Y.; Weng, K.; Zhu, D.; Wang, Z.; Lin, Q. A new type of compact gravimeter for long-term absolute gravity monitoring. Metrologia 2019, 56, 025001. [Google Scholar] [CrossRef]
- Wu, B.; Zhu, D.; Cheng, B.; Wu, L.; Wang, K.; Wang, Z.; Shu, Q.; Li, R.; Wang, H.; Wang, X.; et al. Dependence of the sensitivity on the orientation for a free-fall atom gravimeter. Opt. Exp. 2019, 27, 11252–11263. [Google Scholar] [CrossRef] [PubMed]
- Menoret, V.; Vermeulen, P.; Le Moigne, N.; Bonvalot, S.; Bouyer, P.; Landragin, A.; Desruelle, B. Gravity measurements below 10(-9) g with a transportable absolute quantum gravimeter. Sci. Rep. 2018, 8, 12300. [Google Scholar] [CrossRef] [PubMed]
- Zheng, W.; Li, Z.L.; Wu, F. Research progress of the underwater gravity-aided navigation based on the information of aerospace-marine integration. J. Natl. Uni. Def. Techno. 2020, 42, 39–49. [Google Scholar] [CrossRef]
- Rakholia, A.V.; McGuinness, H.J.; Biedermann, G.W. Dual-Axis High-Data-Rate Atom Interferometer via Cold Ensemble Exchange. Phys. Rev. Appl. 2014, 2, 054012. [Google Scholar] [CrossRef] [Green Version]
- Barrett, B.; Antoni-Micollier, L.; Chichet, L.; Battelier, B.; Leveque, T.; Landragin, A.; Bouyer, P. Dual matter-wave inertial sensors in weightlessness. Nat. Commun. 2016, 7, 13786. [Google Scholar] [CrossRef] [Green Version]
- Barrett, B.; Bertoldi, A.; Bouyer, P. Inertial quantum sensors using light and matter. Phys. Scr. 2016, 91, 053006. [Google Scholar] [CrossRef]
- Barrett, B.; Cheiney, P.; Battelier, B.; Napolitano, F.; Bouyer, P. Multidimensional Atom Optics and Interferometry. Phys. Rev. Lett. 2019, 122, 043604. [Google Scholar] [CrossRef] [Green Version]
- Qin, F.J.; Huang, C.F.; Li, D.Y.; Chang, L.B.; Li, K.L.; Zhu, J.P.; Che, H.; Di, J.B.; Gao, D.Y.; Jiang, S. Underwater Target Detection Method and System Based on Gravity Information. Patent CN112859186B, 15 April 2022. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research Teams | Raman Light Interval Time (ms) | Sensitivity (μGal/Hz1/2) | Uncertainty (μGal) | Resolution (Integration Time) (μGal) |
|---|---|---|---|---|
| French Aerospace Lab (ONERA) [17] | 48 | 42 | 25 | — 1 |
| LNE-SYRTE, Observatoire de Paris [18,19,20] | 80 | 5.7 | 4.3 | 0.2 (3 h) |
| Humboldt Universitat zu Berlin [21] | 260 | 9.6 | 3.2 | 0.05 (105 s) |
| the University of California, Berkeley [22] | 130 | 37 | 15 | 2 (0.5 h) |
| Wuhan Institute of Physics and Mathematics [23,24] | 200 | 28 | 9 | 1 (4000 s) |
| Zhejiang University of Technology [25] | 70 | 90 | 19 | — |
| National institute of metrology, China [26] | 70 | 44 | 5.2 | 0.2 (30,000 s) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, C.; Li, A.; Qin, F. Research Progress of Dynamic Measurement Technology of Atom Gravimeter. Appl. Sci. 2023, 13, 8774. https://doi.org/10.3390/app13158774
Huang C, Li A, Qin F. Research Progress of Dynamic Measurement Technology of Atom Gravimeter. Applied Sciences. 2023; 13(15):8774. https://doi.org/10.3390/app13158774
Chicago/Turabian StyleHuang, Chunfu, An Li, and Fangjun Qin. 2023. "Research Progress of Dynamic Measurement Technology of Atom Gravimeter" Applied Sciences 13, no. 15: 8774. https://doi.org/10.3390/app13158774