

GTMesh: A Highly Efficient C++ Template Library for Numerical Schemes on General Topology Meshes

Abstract
:1. Introduction
- OpenMesh [22] is aimed at applications in computer graphics, and provides tools for mesh modification. However, it only supports polygonal meshes for the representation of surfaces in 3D.
- PUMI (Parallel Unstructured Mesh Infrastructure) [23] is a complex library supporting distributed mesh storage and processing via MPI [24]. By default, the mesh representation by means of the MDS (Mesh Data Structure) submodule only accepts a limited set of topological types known a priori at compile time, in order to achieve high performance.
- ViennaGrid [25] is a modern library leveraging the concepts of template metaprogramming and iterators available in C++. It provides data structures for arbitrary-dimensional meshes and also a number of specialized data types and mesh algorithms that are often limited to certain dimensions or mesh types.
- MOAB (Mesh-Oriented datABase) [26] is an extensive library that allows general topology meshes and supports mesh refinement, decomposition, parallel I/O and other features. Despite being written in C++, it does not take advantage of templates, and its performance has been shown to be relatively poor when processing polyhedral meshes [27]. MOAB always represents mesh geometry in a 3D coordinate system.
- DUNE (Distributed and Unified Numerics Environment) [28] is a framework for numerical computations primarily (but not exclusively) aimed at FEM. It is a mature and very complex project with incomplete documentation, which also supports general topology meshes.
- TNL (Template Numerical Library) [29] is a dynamically evolving framework for implementing efficient numerical algorithms in C++, taking advantage of State-of-the-Art C++ programming paradigms and exposing both CPU and GPU programming through a unified interface. Recently, support for general topology polytopal meshes [27] has been added.
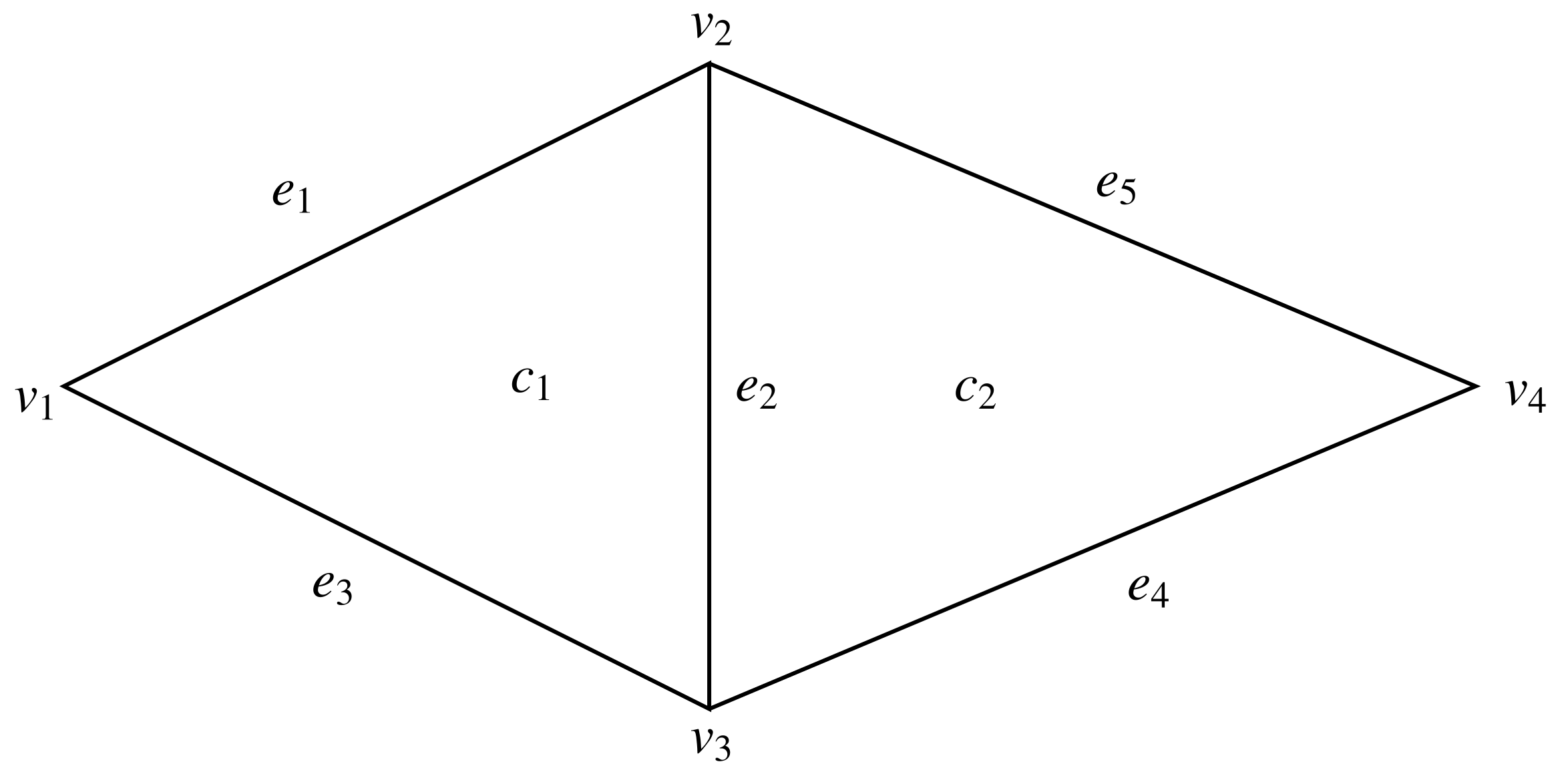
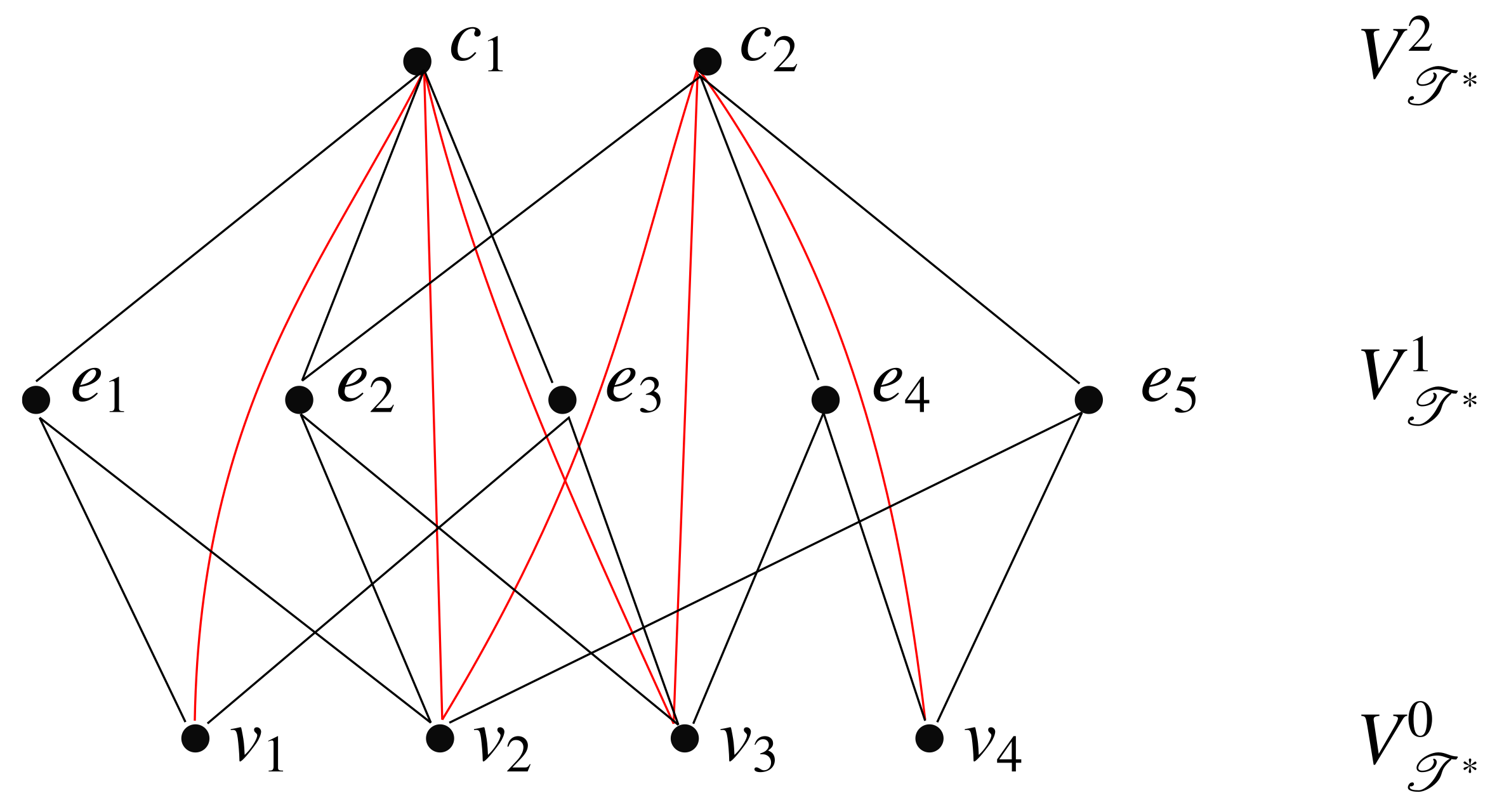
2. Geometry and Topology of Unstructured Meshes
- .
- .
- .

Graph Description of a General Topology Mesh
3. Abstract Data Structure for Mesh Representation in
4. The GTMesh Library
- storing the mesh topology;
- associating data with the mesh;
- calculating various properties of the mesh;
- exporting and importing mesh-related data.
4.1. Mesh Data Structure
4.2. Associating Data with the Mesh
- By position i of the dimension within the ordered list (, , …, );
- By dimension d. In this case, the ith vector is returned, where i is the first integer in the sequence (), such that .

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 |
4.3. Algorithms
4.3.1. Iteration Over Mesh Structure
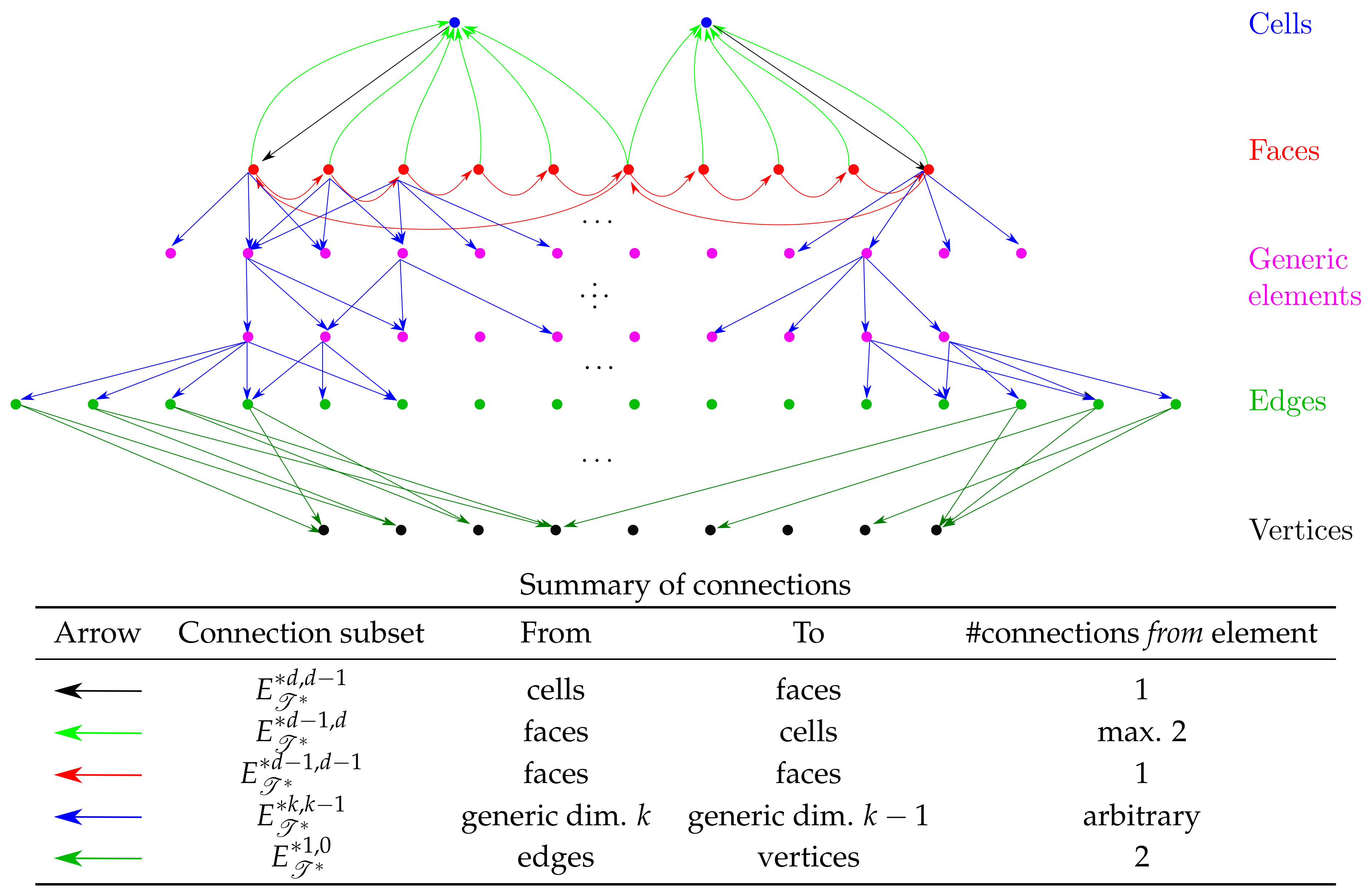
4.3.2. Determining the Elements’ Connections
 |
4.3.3. Determining the Elements’ Neighborhood
4.3.4. Calculation of Proper Coloring of a Mesh
4.3.5. Calculation of Element Centers
- set the dimension ;
- for all elements , calculate the center of e as by a loop over sub-elements of e;
- if then , and go to step 2; else, stop the algorithm and return the result.

4.3.6. Calculation of Element Measures

4.3.7. Calculation of Face Normal Vectors
4.3.8. Import and Export of the Mesh
4.3.9. Import and Export of Mesh Data
4.4. The UnstructuredMesh Wrapper Class
 |
5. Class Reflection in C++ Optimized for High-Performance Computing
- Data stored in user-defined data structures can be exported/imported to/from VTK, JSON or binary formats.
- Arithmetic or other mathematical operations (such as norm calculation) can be performed on the user-defined data structures.
5.1. Member Access
- Member reference, i.e., &data_structure::member, which defines the get, constant get and set operations. These operations are, thus, accessing the member data directly.
- Pair of getter and setter, where each of these may be a member function or global function (callable object, e.g., lambda function) accepting the data structure instance as a parameter.
5.2. Class Traits
5.3. Default Traits
 |
 |
5.4. Example of Use
| Algorithm 1 Pseudo-code of the Runge–Kutta–Merson ODE solver [38]. | |
| 1 | ; ; |
| 2 | while(){ |
| 3 | if () { |
| 4 | ); |
| 5 | } |
| 6 | ; |
| 7 | ; |
| 8 | ; |
| 9 | ; |
| 10 | ; |
| 11 | max_element |
| 12 | if () { |
| 13 | ; |
| 14 | ); |
| 15 | if () == 0) continue; |
| 16 | } |
| 17 | ); |
| 18 | } |
 |
6. Example Application
6.1. Problem Formulation and Discretization
- is the approximation of ;
- is the approximation of defined as
- are the centers of the volumes K, L, respectively;
- is the center of .
6.2. Single-Threaded Version
- loadMesh(), responsible for loading an unstructured mesh into the UnstructuredMesh structure mesh;
- exportMeshAndData(), responsible for exporting the computational mesh together with the data;
6.3. OpenMP Multi-Threaded Version Using Graph Coloring
 |
6.4. OpenMP Multi-Threaded Version Using Auxiliary Data
7. Conclusions
- Despite being a relatively compact project, GTMesh provides the tools for developing complete numerical solvers in a dimension-agnostic manner.
- The code generated by template instantiation for the particular situation is equivalent to a direct implementation with no additional overhead.
- GTMesh not only includes data structures for arbitrary-dimensional meshes but also provides robust algorithms related to mesh geometry.
- The implementation of class reflection in C++ using the Traits mechanism is sufficiently versatile and suitable for development of numerical and data I/O algorithms working with generic data types.
- GTMesh algorithms provide support for multi-threaded (OpenMP) parallelization.
- Only conforming meshes are supported. Other types of mesh topology, such as recursively refined non-conforming meshes based on quadtree/octree structures, would require a separate implementation.
- GTMesh does not offer support for distributed computing. However, the architecture of GTMesh could be extended in this manner, without the need to redesign its core data structures.
- The authors of GTMesh and this article also collaborate with the developers of TNL [29], opening up the possibility of introducing GPU support, which is currently missing. Some preliminary steps have already been made in this direction.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| adjacency matrix of the graph G (Definition 5) | |
| connection matrix of the graph from dimension to dimension | |
| a set of faces of all cells in the mesh (Definition 1) | |
| a set of faces constituting the boundary of (Definition 1) | |
| edges of , given by (3) | |
| a subset of edges of from dimension to dimension , given by (4) | |
| graph representation of | |
| time interval (Section 6) | |
| d-dimensional Lebesgue measure of (Section 2) | |
| -dimensional Hausdorff measure of (Section 2) | |
| number of elements of dimension in | |
| neighborhood of the mesh element | |
| elements with dimension connected to | |
| set of neighbors of dimension connected by elements of dim. , given by (11) | |
| spatial domain discretized by the mesh | |
| the mesh, i.e., the set of cells covering (Definition 1) | |
| the system of geometrical elements of (Definition 2) | |
| system of geometrical elements of with dimension k (Definition 2) | |
| T | temperature (in the example problem in Section 6) |
| vertices of , given by (1) | |
| geometrical center of the element |
| CFD | Computational Fluid Dynamics |
| DUNE | Distributed and Unified Numerics Environment [28] |
| FEM | Finite Element Method |
| FVM | Finite Volume Method |
| I/O | Input/Output |
| JSON | JavaScript Object Notation, a lightweight data-interchange format (www.json.org) |
| MOAB | Mesh-Oriented datABase [26] |
| ODE | Ordinary Differential Equation |
| OpenMP | Open Multi-Processing, a parallel programming API (www.openmp.org) |
| PUMI | Parallel Unstructured Mesh Infrastructure [23] |
| RKM | Runge–Kutta–Merson, an ODE solver with adaptive time step [38] |
| SFINAE | Substitution Failure Is Not An Error [31] |
| TNL | Template Numerical Library [29] |
| VTK | Visualization Toolkit [36] |
References
- Johnson, C. Numerical Solution of Partial Differential Equations by the Finite Element Method; Cambridge University Press: Cambridge, UK, 1987. [Google Scholar]
- Szabó, B.; Babuška, I. Finite Element Analysis—Method, Verification, and Validation, 2nd ed.; Wiley Series in Computational Mechanics; Wiley: Hoboken, NJ, USA, 2021. [Google Scholar]
- Larson, M.G.; Bengzon, F. The Finite Element Method: Theory, Implementation, and Applications, 6th ed.; Number 10 in Texts in Computational Science and Engineering; SI Version; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Logan, D.L. A First Course in the Finite Element Method; CENGAGE: Boston, MA, USA, 2021. [Google Scholar]
- Eymard, R.; Gallouët, T.; Herbin, R. Finite Volume Methods. In Handbook of Numerical Analysis; Ciarlet, P.G., Lions, J.L., Eds.; Elsevier: Amsterdam, The Netherlands, 2000; Volume 7, pp. 715–1022. [Google Scholar]
- Moukalled, F.; Mangani, L.; Darwish, M. The Finite Volume Method in Computational Fluid Dynamics: An Advanced Introduction with OpenFOAM and Matlab; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Blazek, J. Computational Fluid Dynamics: Principles and Applications; Butterworth-Heinemann: Oxford, UK, 2015. [Google Scholar]
- Vítek, O.; Macek, J.; Doleček, V.; Syrovátka, Z.; Pavlovic, Z.; Priesching, P.; Tap, F.; Goryntsev, D. Application of advanced combustion models in internal combustion engines based on 3-D CFD LES approach. Acta Polytech. 2021, 61, 14–32. [Google Scholar] [CrossRef]
- Beneš, M.; Strachota, P.; Máca, R.; Havlena, V.; Mach, J. A Quasi-1D Model of Biomass Co-Firing in a Circulating Fluidized Bed Boiler. In Finite Volumes for Complex Applications VII—Elliptic, Parabolic, and Hyperbolic Problems, Proceedings of the FVCA 7, Berlin, Germany, 15–20 June 2014; Springer Proceedings in Mathematics & Statistics; Fuhrmann, J., Ohlberger, M., Rohde, C., Eds.; Springer: Berlin/Heidelberg, Germany, 2014; Volume 78, pp. 791–799. [Google Scholar]
- Wang, W.; Cao, Y.; Okaze, T. Comparison of hexahedral, tetrahedral and polyhedral cells for reproducing the wind field around an isolated building by LES. Build. Environ. 2021, 195, 107717. [Google Scholar] [CrossRef]
- Sosnowski, M.; Krzywanski, J.; Gnatowska, R. Polyhedral meshing as an innovative approach to computational domain discretization of a cyclone in a fluidized bed CLC unit. ES3 Web Conf. 2017, 14, 01027. [Google Scholar] [CrossRef]
- Sosnowski, M.; Krzywanski, J.; Grabowska, K.; Gnatowska, R. Polyhedral meshing in numerical analysis of conjugate heat transfer. EPJ Web Conf. 2018, 180, 02096. [Google Scholar] [CrossRef]
- Thomas, M.L.; Longest, P.W. Evaluation of the polyhedral mesh style for predicting aerosol deposition in representative models of the conducting airways. J. Aerosol Sci. 2022, 159, 105851. [Google Scholar] [CrossRef] [PubMed]
- Jasak, H.; Jemcov, A.; Tukovic, Z. OpenFOAM: A C++ library for complex physics simulations. In Proceedings of the International Workshop on Coupled Methods in Numerical Dynamics, Dubrovnik, Croatia, 19–21 September 2007; IUC Dubrovnik: Dubrovnik, Croatia, 2007; Volume 1000, pp. 1–20. [Google Scholar]
- Hahn, J.; Mikula, K.; Frolkovič, P.; Basara, B. Finite volume method with the Soner boundary condition for computing the signed distance function on polyhedral meshes. Int. J. Numer. Methods Eng. 2022, 123, 1057–1077. [Google Scholar] [CrossRef]
- Hahn, J.; Mikula, K.; Frolkovič, P.; Basara, B. Inflow-Based Gradient Finite Volume Method for a Propagation in a Normal Direction in a Polyhedron Mesh. J. Sci. Comput. 2017, 72, 442–465. [Google Scholar] [CrossRef]
- Perumal, L. A Brief Review on Polygonal/Polyhedral Finite Element Methods. Math. Prob. Eng. 2018, 2018, 5792372. [Google Scholar] [CrossRef] [Green Version]
- Rashid, M.M.; Selimotic, M. A three-dimensional finite element method with arbitrary polyhedral elements. Int. J. Numer. Methods Eng. 2006, 67, 226–252. [Google Scholar] [CrossRef]
- Bishop, J.E.; Sukumar, N. Polyhedral finite elements for nonlinear solid mechanics using tetrahedral subdivisions and dual-cell aggregation. Comput. Aided Geom. Des. 2020, 77, 101812. [Google Scholar] [CrossRef]
- Nguyen-Ngoc, H.; Cuong-Le, T.; Nguyen, K.D.; Nguyen-Xuan, H.; Abdel-Wahab, M. Three-dimensional polyhedral finite element method for the analysis of multi-directional functionally graded solid shells. Compos. Struct. 2023, 305, 116538. [Google Scholar] [CrossRef]
- Wicke, M.; Botsch, M.; Gross, M. A Finite Element Method on Convex Polyhedra. Comput. Graph. Forum 2007, 26, 355–364. [Google Scholar] [CrossRef]
- Botsch, M.; Steinberg, S.; Bischoff, S.; Kobbelt, L. OpenMesh—A generic and efficient polygon mesh data structure. In Proceedings of the 1st OpenSG Symposium, Darmstadt, Germany, 29 January 2002; IEEE Press: Manhattan, NY, USA, 2002. [Google Scholar]
- Ibanez, D.A.; Seol, E.S.; Smith, C.W.; Shephard, M.S. PUMI: Parallel unstructured mesh infrastructure. ACM Trans. Math. Softw. 2016, 42, 1–28. [Google Scholar] [CrossRef]
- Message Passing Interface Forum. MPI: A Message-Passing Interface Standard Version 4.0. 2021. Available online: https://www.mpi-forum.org/docs/mpi-4.0/mpi40-report.pdf (accessed on 13 July 2023).
- Rudolf, F.; Rupp, K.; Weinbub, J. ViennaGrid 2.1.0—User Manual; Techreport; Vienna University of Technology: Vienna, Austria, 2014. [Google Scholar]
- Tautges, T.J.; Ernst, C.; Stimpson, C.; Meyers, R.J.; Merkley, K. MOAB: A Mesh-Oriented Database; Technical Report; Sandia National Laboratories: Albuquerque, NM, USA, 2004. [CrossRef] [Green Version]
- Klinkovský, J.; Oberhuber, T.; Fučík, R.; Žabka, V. Configurable Open-source Data Structure for Distributed Conforming Unstructured Homogeneous Meshes with GPU Support. ACM Trans. Math. Softw. 2022, 48, 1–30. [Google Scholar] [CrossRef]
- Bastian, P.; Blatt, M.; Dedner, A.; Engwer, C.; Klöfkorn, R.; Kornhuber, R.; Ohlberger, M.; Sander, O. A generic grid interface for parallel and adaptive scientific computing. Part II: Implementation and tests in DUNE. Computing 2008, 82, 121–138. [Google Scholar] [CrossRef]
- Oberhuber, T.; Klinkovský, J.; Fučík, R. TNL: Numerical Library for Modern Parallel Architectures. Acta Polytech. 2021, 61, 122–134. [Google Scholar] [CrossRef]
- ISO/IEC 14882:2014; Information Technology—Programming Languages—C++, 4th ed. ISO: London, UK, 2017; p. 1358.
- Vandevoorde, D.; Josuttis, N.M.; Gregor, D. C++ Templates: The Complete Guide, 2nd ed.; Addison-Wesley: Boston, MA, USA, 2017. [Google Scholar]
- Meyer, B. Object-Oriented Software Construction; Prentice Hall: Upper Saddle River, NJ, USA, 1988. [Google Scholar]
- Bondy, J.A.; Murty, U.S.R. Graph Theory with Applications; Macmillan London: London, UK, 1976; Volume 290. [Google Scholar]
- Brenner, S.; Scott, R. The Mathematical Theory of Finite Element Methods; Springer Science & Business Media: Berlin, Germany, 2007; Volume 15. [Google Scholar]
- Hahn, J.; Mikula, K.; Frolkovič, P.; Medl’a, M.; Basara, B. Iterative inflow-implicit outflow-explicit finite volume scheme for level-set equations on polyhedron meshes. Comput. Math. Appl. 2019, 77, 1639–1654. [Google Scholar]
- Schroeder, W.; Martin, K.; Lorensen, B. The Visualization Toolkit, 4th ed.; Kitware: New York, NY, USA, 2006. [Google Scholar]
- ISO/IEC 14882:2017; Information Technology—Programming Languages—C++, 5th ed. ISO: London, UK, 2017; p. 1605.
- Butcher, J.C. Numerical Methods for Ordinary Differential Equations, 2nd ed.; Wiley: Chichester, UK, 2008. [Google Scholar] [CrossRef]
- Christiansen, J. Numerical solution of ordinary simultaneous differential equations of the 1st order using a method for automatic step change. Numer. Math. 1970, 14, 317–324. [Google Scholar] [CrossRef]
- Jakubec, T. Numerical Simulation of Multiphase Flow on 3D Unstructured Meshes with an Arbitrary Topology. Master’s Thesis, Czech Technical University in Prague, Prague, Czech Republic, 2021. [Google Scholar]




| Symbol | Meaning |
|---|---|
| t | current time level |
| T | final time |
| initial time | |
| time step | |
| initial time step | |
| numerical solution | |
| initial condition for the numerical solution | |
| tolerance parameter | |
| time step adjustment parameter ( is recommended) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jakubec, T.; Strachota, P. GTMesh: A Highly Efficient C++ Template Library for Numerical Schemes on General Topology Meshes. Appl. Sci. 2023, 13, 8748. https://doi.org/10.3390/app13158748
Jakubec T, Strachota P. GTMesh: A Highly Efficient C++ Template Library for Numerical Schemes on General Topology Meshes. Applied Sciences. 2023; 13(15):8748. https://doi.org/10.3390/app13158748
Chicago/Turabian StyleJakubec, Tomáš, and Pavel Strachota. 2023. "GTMesh: A Highly Efficient C++ Template Library for Numerical Schemes on General Topology Meshes" Applied Sciences 13, no. 15: 8748. https://doi.org/10.3390/app13158748