Electrification has become one of the most-chosen paths to limit the air pollution derived from vehicles. As stated in [
1,
2], electric and hybrid powertrains allow for a reduction in the environmental impact of vehicles on climate change and global warming. Recently, the increasing demand for more-efficient and less-polluting vehicles has also involved the sector of non-road mobile machinery (NRMM) [
3,
4,
5,
6]. Among NRMM, agricultural tractors play an important role since they are a key element in the food supply chain. To reduce the impact of these vehicles and to be compliant with the increasingly stringent regulations, different strategies have been proposed, analysed and evaluated by studies available in the literature. Apart from electrification, alternative possible paths to follow are to adopt exhaust gas aftertreatment systems [
7] or to use biofuels, such as biodiesel and biogas [
8,
9], instead of traditional diesel. However, these strategies do not completely overcome the problem: the adoption of complex and bulky exhaust gas aftertreatment systems is often limited by the efficiency of the system and by on-board space availability, while the use of biofuels could led to an increase in emission levels of certain chemical species. Thus, other studies focused on the hybridization of tractor powertrains [
10,
11,
12], which allows for downsizing of the thermal engine and show promising results in terms of fuel savings and efficiency improvements. However, these studies focused on hybrid architectures in which there is an internal combustion engine; therefore, the vehicle still produces harmful products deriving from the combustion process. In this context, fuel cell (FC) vehicles have gained a growing interest because they locally produce zero emissions and their refuelling time is comparable to that of a conventional powertrain with an internal combustion engine [
13]. As a consequence, several studies have been carried out regarding the development and the analysis of fuel cell powertrains, including in passenger cars, light vehicles, trucks and off-road vehicles [
14,
15,
16,
17,
18,
19,
20,
21,
22,
23]. In particular, off-road vehicles and NRMM may require high operational time that, considering actual state-of-the-art battery technology, may not be compatible with pure battery electric vehicles due to high charging time and low endurance. On the contrary, fuel cell powertrains could be an alternative that at the same time meets the advantages of having no combustion processes, thus zero tank-to-wheel emissions, and high productivity [
24]. However, to properly evaluate the environmental impact of fuel cell powertrains, the various hydrogen production methods should be taken into account using a life-cycle approach and exergy-based analysis [
25,
26,
27], giving particular attention to innovative, less-pollutant and more-efficient processes [
28,
29]. In order to avoid fast degradation, fuel cells alone cannot follow the almost instantaneous changes in power demands that are typical of a vehicular application; therefore, other on-board energy sources, such as batteries and ultra-capacitors, must be introduced [
30,
31]. Thus, technological efforts are also being carried out to try to improve these additional on-board power sources that are necessary for the optimal operation of a fuel-cell-powered vehicle [
32]. The introduction of one or more additional power sources leads to the necessary development of a proper energy management strategy (EMS) that determines the power split among the different sources [
33,
34]. The development of the EMS is crucial for the optimal operation of the fuel cell hybrid power system [
35,
36,
37]. With a view of analysing and optimizing the EMS of a hybrid fuel cell powertrain, the development of a scaled test bench for experimental measurements is an effective strategy. Vural et al. [
38] tested four hybrid fuel cell powertrain configurations with different batteries, supercapacitors and power converter combinations on a test bench. As for the power sources, the experimental setup consisted of a 1.2 kW air-cooled proton-exchange membrane fuel cell system, two series-connected valve-regulated lead acid (VRLA) batteries and four series-connected ultracapacitor modules. To simulate the power demand, a DC load was used, while for emulating the braking operation, a motor/generator unit was exploited. Wang et al. [
39] developed an experimental setup to evaluate the behaviour of a battery/fuel cell hybrid powertrain and a battery/supercapacitor/fuel cell hybrid powertrain, applying an EMS based on a finite state machine. Xun et al. [
40] experimentally investigated the behaviour of a fuel cell/supercapacitor hybrid system under an adaptive power split control strategy. Iqbal et al. [
41] explored a composite cost-optimal energy management strategy based on a load-following control for a fuel cell/battery powertrain. The EMS principle was to split the power among the two power sources such that the lower frequency part of the power demand was handled by the FC, while the higher frequency part was followed by the battery pack. Moreover, the EMS took into account both hydrogen consumption and source ageing to optimize the power distribution. For the experimental tests, a test bench was developed. In this case, the fuel cell was emulated by a programmable DC power supply, while on the load side, an electronic load was employed. An Arduino was used to collect data from the sensors in the power stage, to communicate with a personal computer and to control the DC-DC converter according to the EMS. Graf et al. [
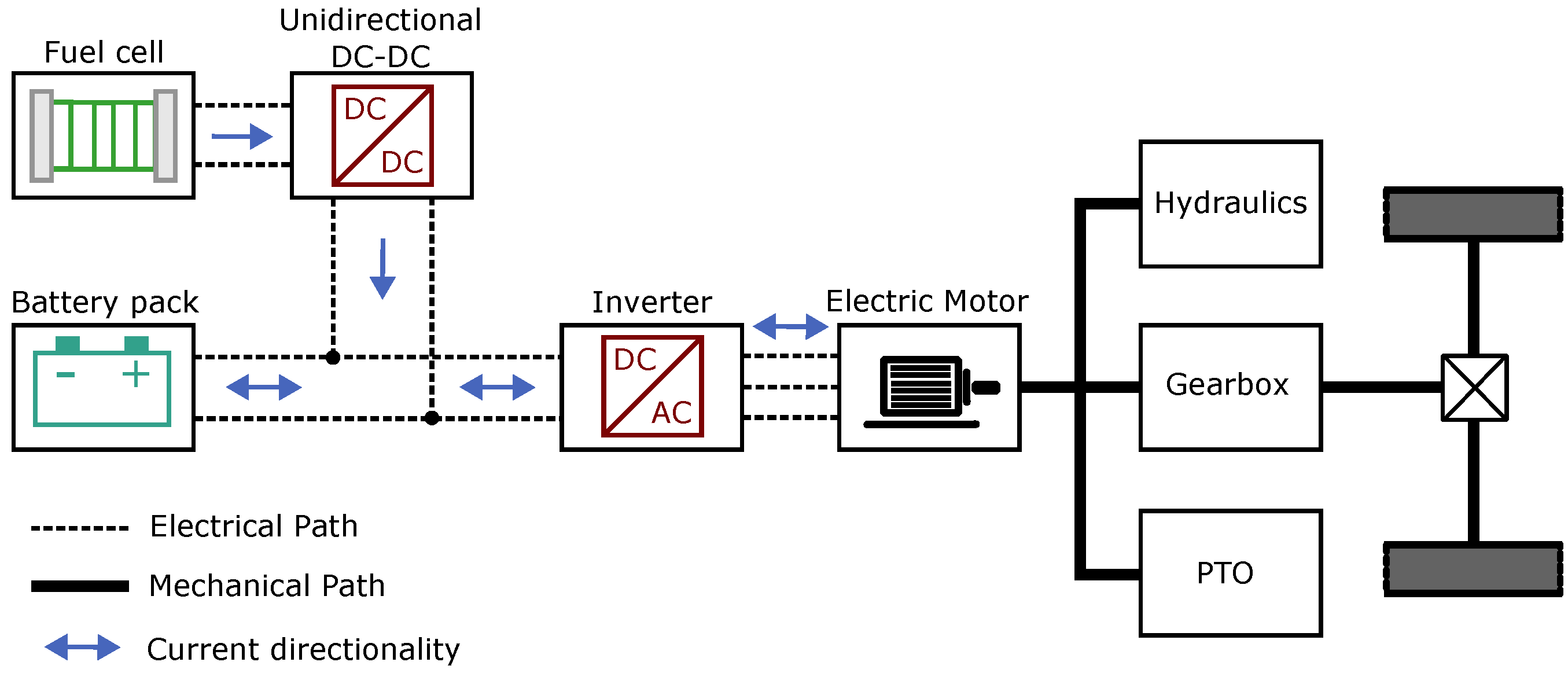
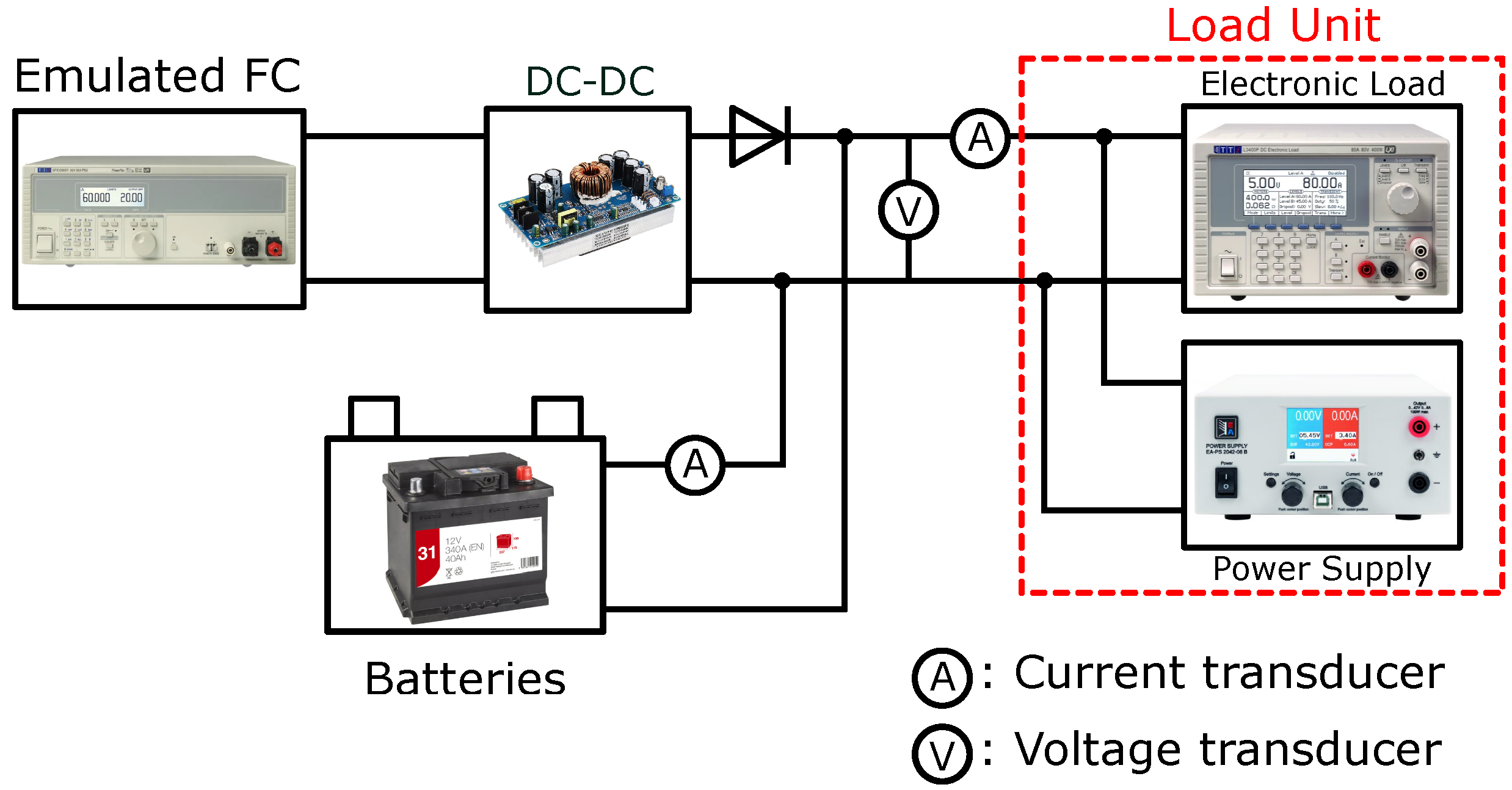
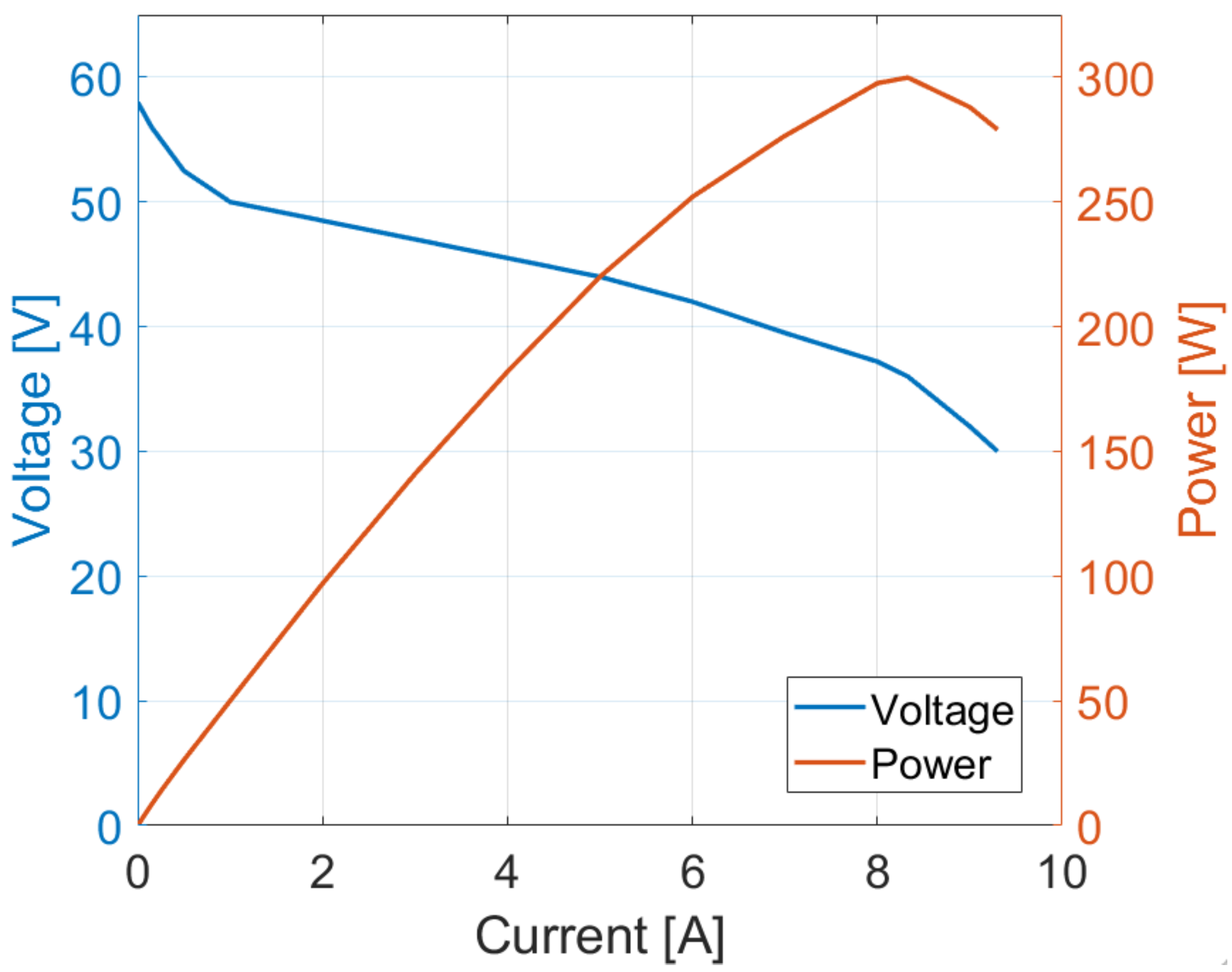
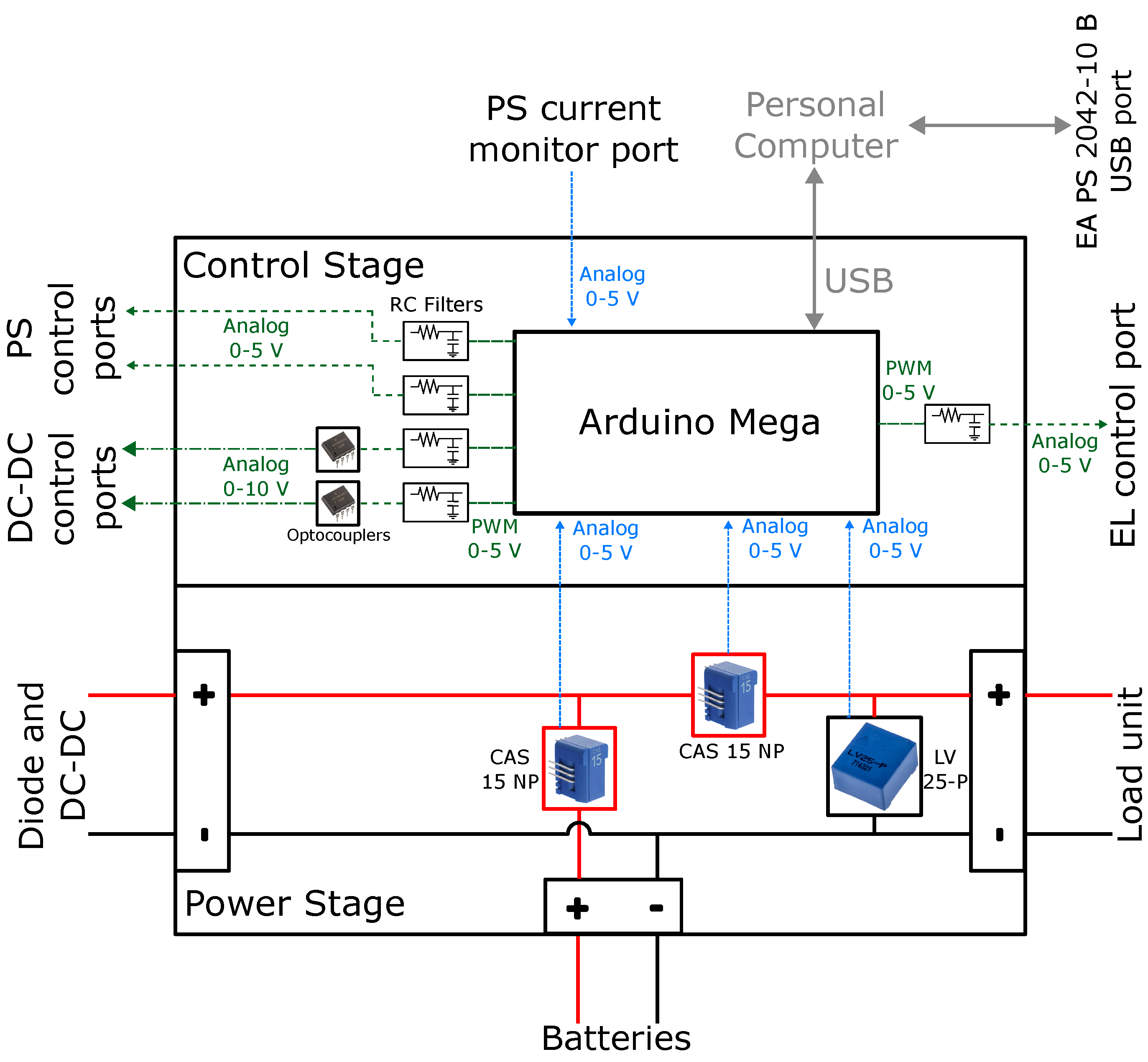
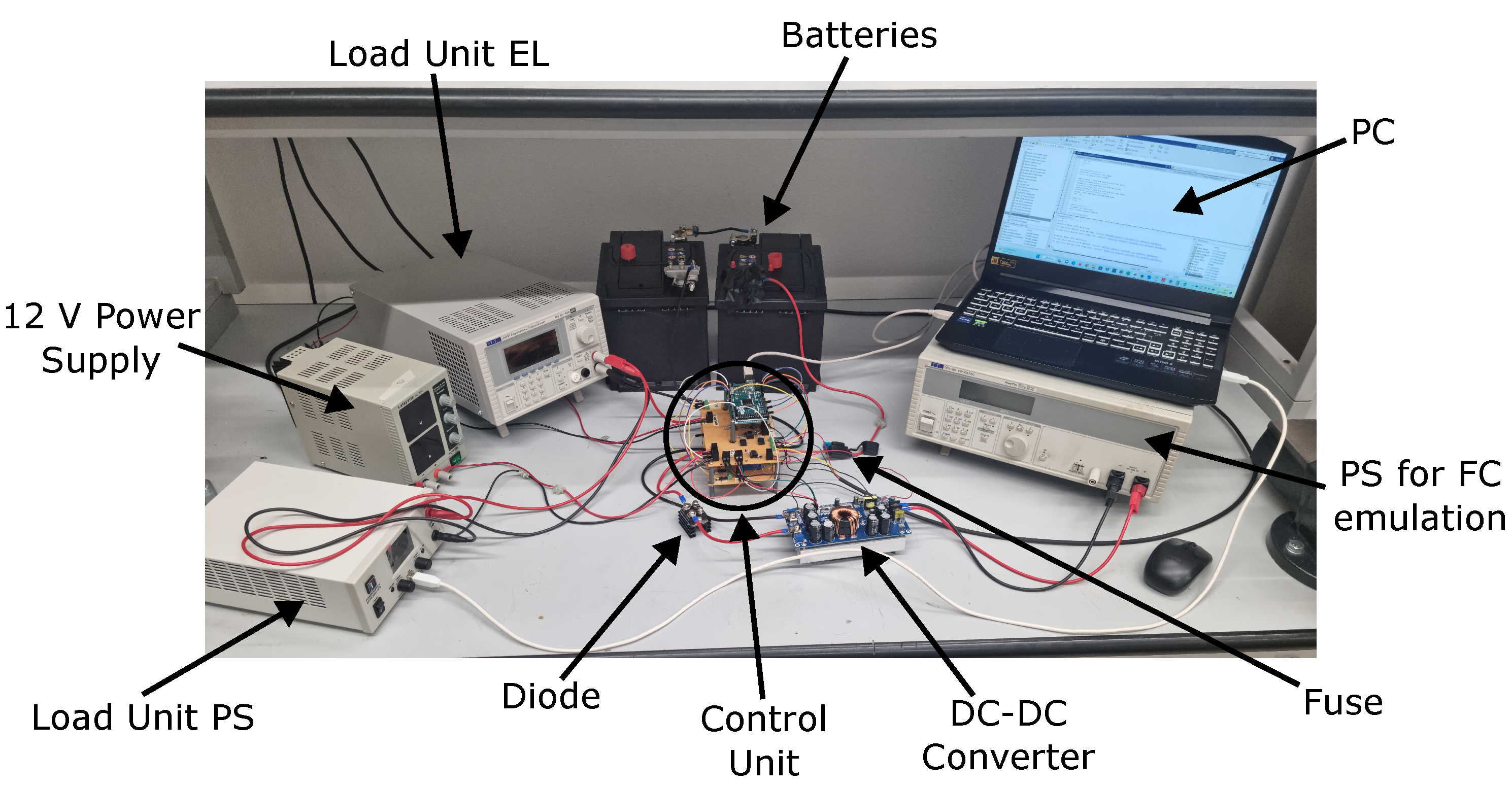
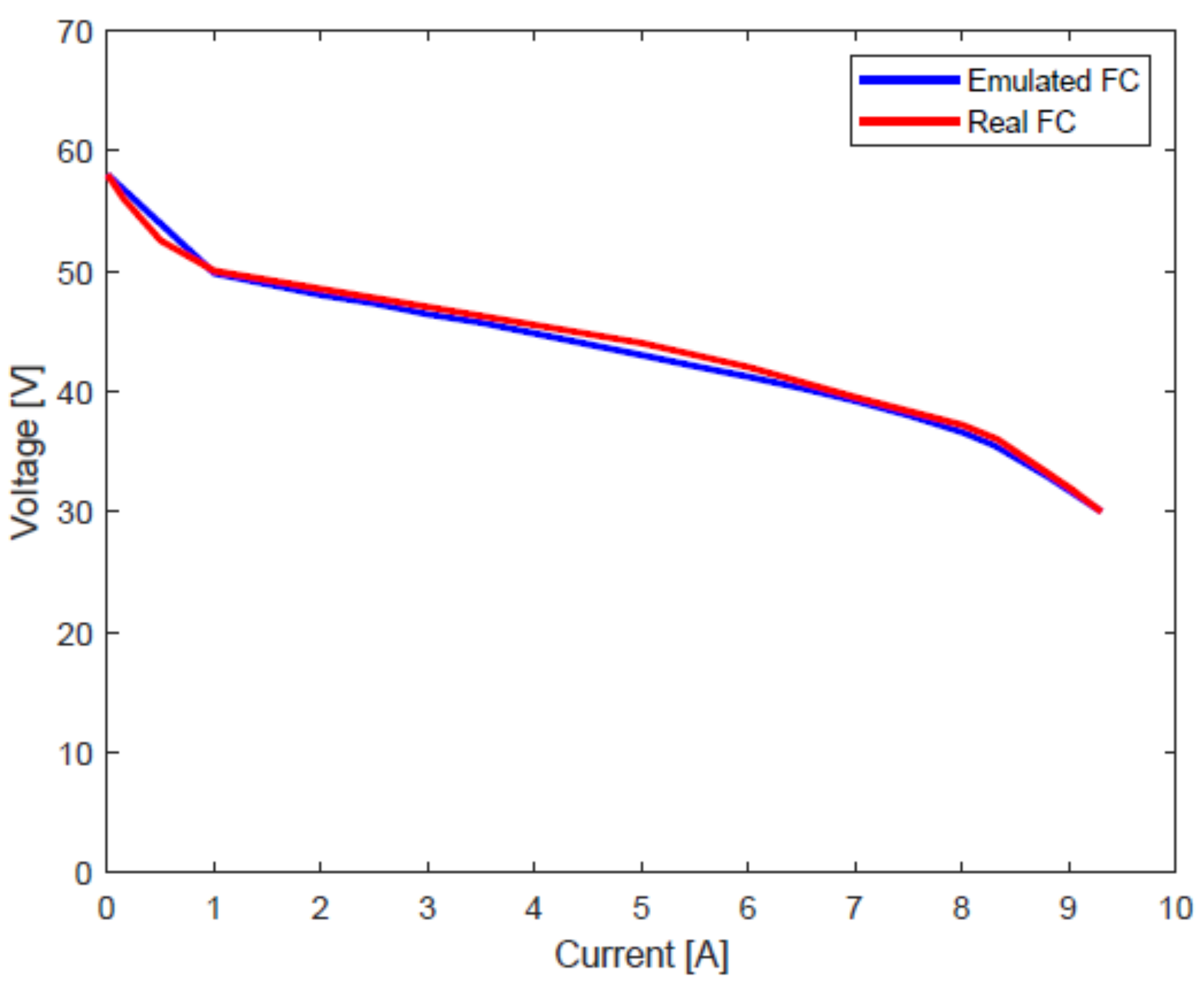
42] developed a laboratory test setup for the emulation of a direct hybrid electric powertrain. In this work, both the fuel cell and the batteries were emulated by programmable DC power sources, whose control was based on a database of their characteristic voltage–current curves. Moreover, both of the power sources were connected without DC-DC converters. It can be stated that in the literature there are many papers that have investigated the topologies and the energy management strategies of hybrid fuel cell powertrains through experimental test benches. However, little attention has been dedicated to the development of software and hardware tools for the realization of the experimental setup. As a matter of fact, most of the existing studies do not provide significant information about the realization of the experimental setups for powertrain testing. Thus, the novelty of this paper lies in providing a simple design procedure for the development of a scaled test bench for the emulation of a fuel cell/battery powertrain. In the proposed setup, the FC is connected to the DC bus through a DC-DC converter, while the batteries are directly connected. The external load is emulated using a DC electronic load and a power supply, which are both programmable. The fuel cell is emulated by another programmable DC power supply controlled so that it reproduces the realistic voltage–current (V-I) curve of a real fuel cell. The power conditioning unit is represented by the DC-DC connection, which is controlled by two signals: a voltage reference signal and a current reference signal. In order to collect data from the power stage, current and voltage transducers are exploited. An Arduino is used as control unit of the test bench due to its easy programming. After defining a simple PI-based control strategy, the system is experimentally validated. The advantages of the proposed experimental setup are the simplicity and easy availability of the required components, the safety and the modularity. In particular, since the FC is emulated using a programmable power supply, all the issues related to the use of a real fuel cell system are not present. Going into detail, the paper is organized as follows:
Section 2 briefly introduces the case study and the reference powertrain considered for the bench development.
Section 3 describes the test bench layout and its main components.
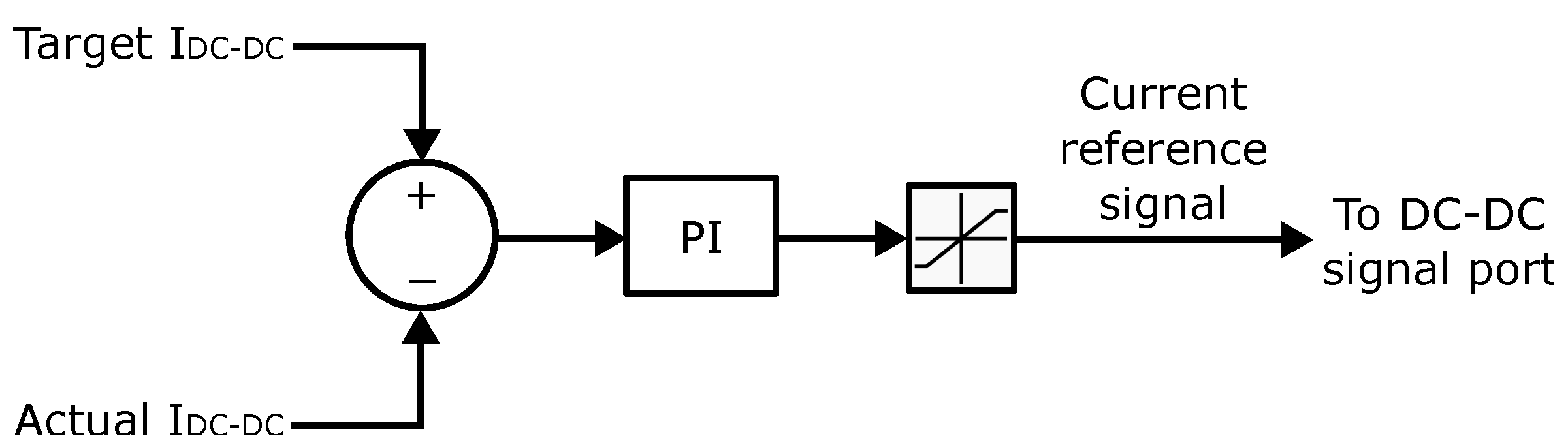
Section 4 explains the proposed PI-based control strategy.
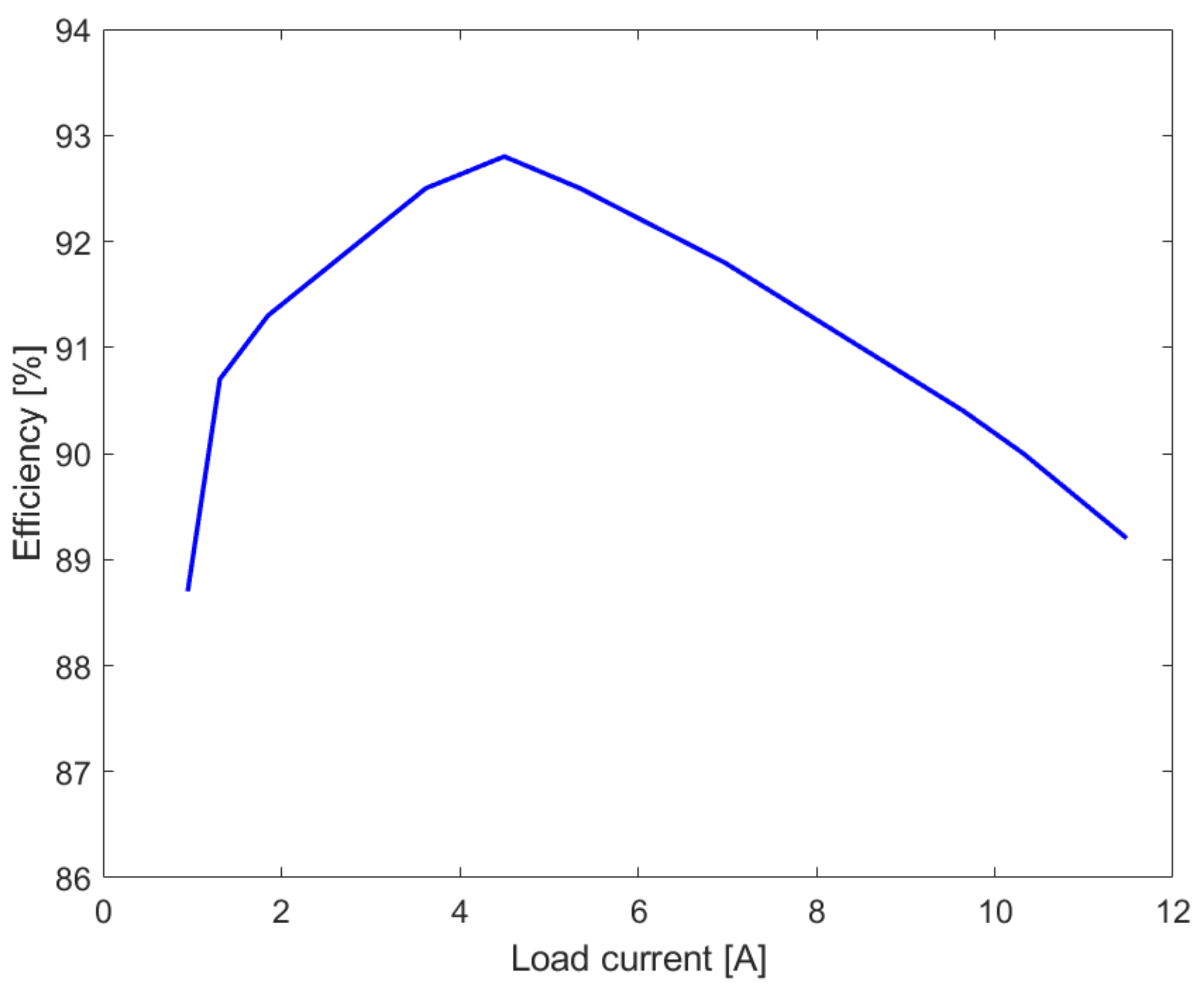
Section 5 describes the experimental tests carried out and the results obtained for the characterization and the validation of the test bench. Finally,
Section 6 summarizes the conclusions.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}