
Overview of 3D Printed Exoskeleton Materials and Opportunities for Their AI-Based Optimization

Abstract
:Featured Application
Abstract
1. Introduction
- Collection of data and designs in repositories;
- Data auditing (including for further use by AI);
- Cyber security, as the consequences of negligence in this area can be disastrous for individuals or company operations;
- Analysis of bulk data extracted from Internet of Things (IoT) systems, including within the Industry 4.0 or eHealth paradigms.
2. Materials Development
- PET (polyethylene terephthalate), also PETG (combined with glycerol/glycerin, the simplest stable trihydric alcohol).
- HIPS—high-impact polystyrene.
- ABS—acrylonitrile-butadiene-styrene terpolymer.
- FLEX—a mix of materials with increased flexibility for printing seals and energy absorbers, also in versions with increased resistance to operating fluids (oils, etc.) and chemicals (paints, varnishes, solvents, etc.).
- special materials: silicon carbide, silicon nitride, aluminum oxide, zirconium dioxide, materials with mineral additives, or wood.
- metal powders: titanium (medical Ti6Al4V), stainless steel, cobalt-chrome, CoCrMo (cobalt-chromium-molybdenum), copper.
- medical polymeric materials with metallic properties, such as PEEK.
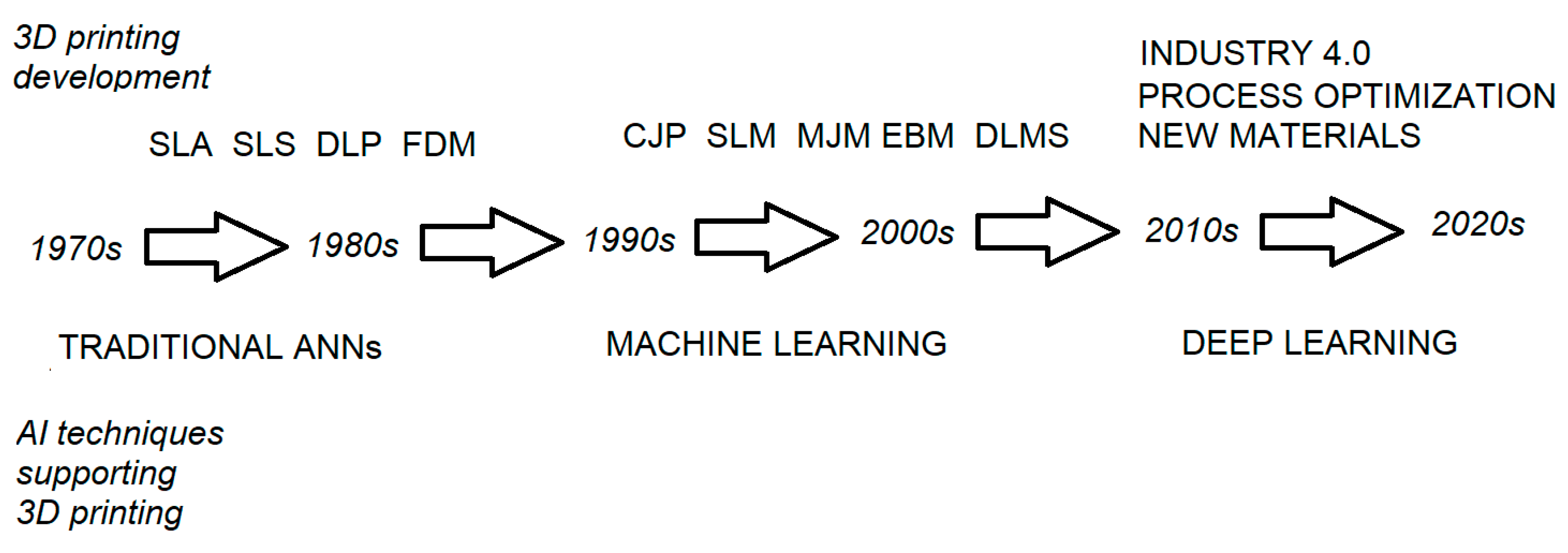
3. Development of Technologies and Applications
4. Control of Exoskeleton
5. Own Experiences
- Analyzing the changes made to successive generations of the exoskeleton.
- Identifying deficiencies from a biomechanical point of view.
- Identifying shortcomings from a technical point of view.
- Identification of components that are difficult to manufacture quickly using the planned 3D printing methods.
- Development and planning of retrofit proposals for testing.
- Optimization of developed materials and technological solutions from the point of view of usability and technology.
- Analysis of test prints of exoskeleton elements and the possibilities of their integration into a working prototype.
- Movement tests with the help of a system of sensors and/or cameras are necessary to refine the computational model.
- Strength tests of the prototype (compression, tensile, etc.).
- Testing of the prototype under laboratory conditions.
- Additional experimental testing (filmed in multiple planes).
- Additional numerical simulations.
- Refinement of the design and improvement of the prints.
- Improving the fit for the patient.
6. Discussion
6.1. Limitations of Own R
6.1.1. Limitations of AI-Supported 3D Printing
6.1.2. Directions for Further Research
- Generative design.
- Automated mass production, personalized.
- Meeting the criteria of sustainable development and the green deal by the industry (e.g., less waste and pollution).
- Improving the ownership of products and services in line with the expectations of all stakeholder groups.
- New, yet unknown applications [72].
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- European Commission. Digital transformation of European Industry and Enterprises. Strategic Policy Forum on Digital Entrepreneurship. 2015. Available online: https://www.digitaleurope.org/resources/digital-transformation-of-european-industry-and-enterprises-a-report-of-the-strategic-policy-forum-on-digital-entrepreneurship/ (accessed on 11 July 2023).
- Boston Consulting Group. Industry 4.0: The Future of Productivity and Growth in Manufacturing Industries. 2015. Available online: https://www.bcg.com/publications/2015/engineered_products_project_business_industry_4_future_productivity_growth_manufacturing_industries (accessed on 11 July 2023).
- Roland Berger Consultants. Industry 4.0: The New Industrial Revolution, How Europe Will Succeed; Roland Berger Consultants: Singapore, 2014. [Google Scholar]
- Westkämper, E. Towards the Re-Industrialization of Europe: A Concept for Manufacturing for 2030; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- European Commision. Industry 5.0. Towards a Sustainable, Human-Centric and Resilient European Industry. 2021. Available online: https://op.europa.eu/en/publication-detail/-/publication/468a892a-5097-11eb-b59f-01aa75ed71a1/ (accessed on 11 July 2023).
- Kruppa, C.; Benner, S.; Brinkemper, A.; Aach, M.; Reimertz, C.; Schildhauer, T.A. New technologies and robotics. Unfallchirurgie 2023, 126, 9–18. [Google Scholar] [CrossRef] [PubMed]
- Kataria, S.; Ravindran, V. Musculoskeletal care—At the confluence of data science, sensors, engineering, and computation. BMC Musculoskelet. Disord. 2022, 23, 169. [Google Scholar] [CrossRef] [PubMed]
- Rojek, I.; Mikołajewski, D.; Kotlarz, P.; Tyburek, K.; Kopowski, J.; Dostatni, E. Traditional Artificial Neural Networks Versus Deep Learning in Optimization of Material Aspects of 3D Printing. Materials 2021, 14, 7625. [Google Scholar] [CrossRef] [PubMed]
- Rojek, I.; Mikołajewski, D.; Kopowski, J.; Kotlarz, P.; Piechowiak, M.; Dostatni, E. Reducing Waste in 3D Printing Using a Neural Network Based on an Own Elbow Exoskeleton. Materials 2021, 14, 5074. [Google Scholar] [CrossRef] [PubMed]
- Rojek, I.; Mikołajewski, D.; Dostatni, E.; Macko, M. AI-Optimized Technological Aspects of the Material Used in 3D Printing Processes for Selected Medical Applications. Materials 2020, 13, 5437. [Google Scholar] [CrossRef] [PubMed]
- Efstathiadis, A.; Symeonidou, I.; Tsongas, K.; Tzimtzimis, E.K.; Tzetzis, D. Parametric Design and Mechanical Characterization of 3D-Printed PLA Composite Biomimetic Voronoi Lattices Inspired by the Stereom of Sea Urchins. J. Compos. Sci. 2023, 7, 3. [Google Scholar] [CrossRef]
- Ansari, M.A.; Crampton, A.; Parkinson, S. A Layer-Wise Surface Deformation Defect Detection by Convolutional Neural Networks in Laser Powder-Bed Fusion Images. Materials 2022, 15, 7166. [Google Scholar] [CrossRef]
- Hanitio, E.W.; Lutfhyansyah, N.R.; Efendi, B.M.; Mardiyati, Y.; Steven, S. From Electronic Waste to 3D-Printed Product, How Multiple Recycling Affects High-Impact Polystyrene (HIPS) Filament Performances. Materials 2023, 16, 3412. [Google Scholar] [CrossRef]
- Wan, M.; Hu, D.; Pei, B. Performance of 3D-Printed Bionic Conch-Like Composite Plate under Low-Velocity Impact. Materials 2022, 15, 5201. [Google Scholar] [CrossRef]
- Godeau, X.Y.; Andrianandrasana, F.J.; Volkova, O.; Szczepanski, C.R.; Zenerino, A.; Montreuil, O.; Godeau, R.P.; Kuzhir, P.; Godeau, G. Investigation on dung beetle’s (Heliocopris Hope, 1838) chitosan valorisation for hydrogel 3D printing. Int. J. Biol. Macromol. 2022, 199, 172–180. [Google Scholar] [CrossRef]
- Rojek, I.; Dostatni, E.; Kopowski, J.; Macko, M.; Mikołajewski, D. AI-Based Support System for Monitoring the Quality of a Product within Industry 4.0 Paradigm. Sensors 2022, 22, 8107. [Google Scholar] [CrossRef]
- Jochumsen, M.; Janjua, T.A.M.; Arceo, J.C.; Lauber, J.; Buessinger, E.S.; Kæseler, R.L. Induction of Neural Plasticity Using a Low-Cost Open Source Brain-Computer Interface and a 3D-Printed Wrist Exoskeleton. Sensors 2021, 21, 572. [Google Scholar] [CrossRef]
- Lubimyi, N.S.; Polshin, A.A.; Gerasimov, M.D.; Tikhonov, A.A.; Antsiferov, S.I.; Chetverikov, B.S.; Ryazantsev, V.G.; Brazhnik, J.; Ridvanov, İ. Justification of the Use of Composite Metal-Metal-Polymer Parts for Functional Structures. Polymers 2022, 14, 352. [Google Scholar] [CrossRef]
- Rojek, I.; Kaczmarek, M.; Kotlarz, P.; Kempiński, M.; Mikołajewski, D.; Szczepański, Z.; Kopowski, J.; Nowak, J.; Macko, M.; Szczepańczyk, A.; et al. Hand Exoskeleton—Development of Own Concept. Appl. Sci. 2023, 13, 3238. [Google Scholar] [CrossRef]
- Rojek, I.; Mikołajewski, D.; Dostatni, E.; Kopowski, J. Specificity of 3D Printing and AI-Based Optimization of Medical Devices Using the Example of a Group of Exoskeletons. Appl. Sci. 2023, 13, 1060. [Google Scholar] [CrossRef]
- Mikołajewski, D.; Rojek, I.; Kotlarz, P.; Dorożyński, J.; Kopowski, J. Personalization of the 3D-Printed Upper Limb Exoskeleton Design—Mechanical and IT Aspects. Appl. Sci. 2023, 13, 7236. [Google Scholar] [CrossRef]
- Mitchell, K.; Raymond, L.; Jin, Y. Material Extrusion Advanced Manufacturing of Helical Artificial Muscles from Shape Memory Polymer. Machines 2022, 10, 497. [Google Scholar] [CrossRef]
- Kopowski, J.; Mikołajewski, D.; Kotlarz, P.; Dostatni, E.; Rojek, I. A Semi-Automated 3D-Printed Chainmail Design Algorithm with Preprogrammed Directional Functions for Hand Exoskeleton. Appl. Sci. 2022, 12, 5007. [Google Scholar] [CrossRef]
- Leal-Junior, A.; Theodosiou, A.; Díaz, C.; Marques, C.; Pontes, M.J.; Kalli, K.; Frizera-Neto, A. Fiber Bragg Gratings in CYTOP Fibers Embedded in a 3D-Printed Flexible Support for Assessment of Human-Robot Interaction Forces. Materials 2018, 11, 2305. [Google Scholar] [CrossRef] [Green Version]
- Mohammadi, A.; Lavranos, J.; Choong, P.; Oetomo, D. Flexo-glove: A 3D Printed Soft Exoskeleton Robotic Glove for Impaired Hand Rehabilitation and Assistance. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; Volume 2018, pp. 2120–2123. [Google Scholar] [CrossRef]
- Xiloyannis, M.; Cappello, L.; Binh, K.D.; Antuvan, C.W.; Masia, L. Preliminary design and control of a soft exosuit for assisting elbow movements and hand grasping in activities of daily living. J. Rehabil. Assist. Technol. Eng. 2017, 4, 2055668316680315. [Google Scholar] [CrossRef]
- Oguntosin, V.W.; Mori, Y.; Kim, H.; Nasuto, S.J.; Kawamura, S.; Hayashi, Y. Design and Validation of Exoskeleton Actuated by Soft Modules toward Neurorehabilitation-Vision-Based Control for Precise Reaching Motion of Upper Limb. Front. Neurosci. 2017, 11, 352. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sanchez, C.; Blanco, L.; Del Río, C.; Urendes, E.; Costa, V.; Raya, R. A 3D-printed passive exoskeleton for upper limb assistance in children with motor disorders: Proof of concept through an electromyography-based assessment. PeerJ 2023, 11, e15095. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.; Li, M.; Wang, J.; Wang, T.; Liang, Z.; He, B.; Xie, J.; Xu, G. A novel wrist rehabilitation exoskeleton using 3D-printed multi-segment mechanism. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. 2021, 2021, 4769–4772. [Google Scholar] [CrossRef] [PubMed]
- Joo, S.Y.; Lee, S.Y.; Cho, Y.S.; Yi, S.; Seo, C.H. Clinical Utility of an Exoskeleton Robot Using Three-Dimensional Scanner Modeling in Burn Patient: A Case Report. J. Burn Care Res. 2021, 42, 1030–1034. [Google Scholar] [CrossRef] [PubMed]
- Serbest, K.; Kutlu, M.; Eldogan, O.; Tekeoglu, I. Development and control of a home-based training device for hand rehabilitation with a spring and cable driven mechanism. Biomed. Tech. 2021, 66, 395–403. [Google Scholar] [CrossRef]
- Yoo, H.J.; Lee, S.; Kim, J.; Park, C.; Lee, B. Development of 3D-printed myoelectric hand orthosis for patients with spinal cord injury. J. Neuroeng. Rehabil. 2019, 16, 162. [Google Scholar] [CrossRef] [Green Version]
- Heung, K.H.L.; Tang, Z.Q.; Ho, L.; Tung, M.; Li, Z.; Tong, R.K.Y. Design of a 3D Printed Soft Robotic Hand for Stroke Rehabilitation and Daily Activities Assistance. IEEE Int. Conf. Rehabil. Robot. 2019, 2019, 65–70. [Google Scholar] [CrossRef]
- Barabás, I.J.; Hartyánszky, I.; Kocher, A.; Merkely, B. A 3D printed exoskeleton facilitates HeartMate III inflow cannula position. Interact. CardioVascular Thorac. Surg. 2019, 29, 644–646. [Google Scholar] [CrossRef]
- Triolo, E.R.; Stella, M.H.; BuSha, B.F. A force augmenting exoskeleton for the human hand designed for pinching and grasping. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; Volume 2018, pp. 1875–1878. [Google Scholar] [CrossRef]
- Li, N.; Yang, T.; Yu, P.; Chang, J.; Zhao, L.; Zhao, X.; Elhajj, I.H.; Xi, N.; Liu, L. Bio-inspired upper limb soft exoskeleton to reduce stroke-induced complications. Bioinspir. Biomim. 2018, 13, 066001. [Google Scholar] [CrossRef]
- Scott, R.A.; Callisaya, M.L.; Duque, G.; Ebeling, P.R.; Scott, D. Assistive technologies to overcome sarcopenia in ageing. Maturitas 2018, 112, 78–84. [Google Scholar] [CrossRef]
- Alavi, N.; Zampierin, S.; Komeili, M.; Cocuzza, S.; Debei, S.; Menon, C. A preliminary investigation into the design of pressure cushions and their potential applications for forearm robotic orthoses. Biomed. Eng. Online 2017, 16, 54. [Google Scholar] [CrossRef] [Green Version]
- Gearhart, C.J.; Varone, B.; Stella, M.H.; Bu Sha, B.F. An effective 3-fingered augmenting exoskeleton for the human hand. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; Volume 2016, pp. 590–593. [Google Scholar] [CrossRef]
- Lei, C.; Phan, A.; Allison, G. Design and fabrication of a three dimensional printable non-assembly articulated hand exoskeleton for rehabilitation. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; Volume 2015, pp. 4627–4630. [Google Scholar] [CrossRef]
- Weiss, P.; Heyer, L.; Munte, T.F.; Heldmann, M.; Schweikard, A.; Maehle, E. Towards a parameterizable exoskeleton for training of hand function after stroke. IEEE Int. Conf. Rehabil. Robot. 2013, 2013, 6650505. [Google Scholar] [CrossRef]
- Kladovasilakis, N.; Sideridis, P.; Tzetzis, D.; Piliounis, K.; Kostavelis, I.; Tzovaras, D. Design and Development of a Multi-Functional Bioinspired Soft Robotic Actuator via Additive Manufacturing. Biomimetics 2022, 7, 105. [Google Scholar] [CrossRef]
- Birouaș, F.I.; Țarcă, R.C.; Dzitac, S.; Dzitac, I. Preliminary Results in Testing of a Novel Asymmetric Underactuated Robotic Hand Exoskeleton for Motor Impairment Rehabilitation. Symmetry 2020, 12, 1470. [Google Scholar] [CrossRef]
- Langlois, K.; Geeroms, J.; Van De Velde, G.; Rodriguez-Guerrero, C.; Verstraten, T.; Vanderborght, B.; Lefeber, D. Improved Motion Classification with an Integrated Multimodal Exoskeleton Interface. Front. Neurorobot. 2021, 15, 693110. [Google Scholar] [CrossRef]
- Marew, T.; Birhanu, G. Three dimensional printed nanostructure biomaterials for bone tissue engineering. Regen. Ther. 2021, 18, 102–111. [Google Scholar] [CrossRef]
- Li, M.; Chen, J.; He, G.; Cui, L.; Chen, C.; Secco, E.L.; Yao, W.; Xie, J.; Xu, G.; Wurdemann, H. Attention Enhancement for Exoskeleton-Assisted Hand Rehabilitation Using Fingertip Haptic Stimulation. Front. Robot. AI 2021, 8, 602091. [Google Scholar] [CrossRef] [PubMed]
- Jiang, M.; Zhou, Z.; Gravish, N. Flexoskeleton Printing Enables Versatile Fabrication of Hybrid Soft and Rigid Robots. Soft Robot. 2020, 7, 770–778. [Google Scholar] [CrossRef]
- Chiaradia, D.; Tiseni, L.; Frisoli, A. Compact Series Visco-Elastic Joint (SVEJ) for Smooth Torque Control. IEEE Trans. Haptics 2020, 13, 226–232. [Google Scholar] [CrossRef]
- Barrios-Muriel, J.; Romero Sánchez, F.; Alonso Sánchez, F.J.; Rodríguez Salgado, D. In vivo measurement of surface skin strain during human gait to improve the design of rehabilitation devices. Comput. Methods Biomech. Biomed. Eng. 2019, 22, 1219–1228. [Google Scholar] [CrossRef]
- Jia, H.; Flommersfeld, J.; Heymann, M.; Vogel, S.K.; Franquelim, H.G.; Brückner, D.B.; Eto, H.; Broedersz, C.P.; Schwille, P. 3D printed protein-based robotic structures actuated by molecular motor assemblies. Nat. Mater. 2022, 21, 703–709. [Google Scholar] [CrossRef] [PubMed]
- Noronha, B.; Ng, C.Y.; Little, K.; Xiloyannis, M.; Kuah, C.W.K.; Wee, S.K.; Kulkarni, S.R.; Masia, L.; Chua, K.S.G.; Accoto, D. Soft, Lightweight Wearable Robots to Support the Upper Limb in Activities of Daily Living: A Feasibility Study on Chronic Stroke Patients. IEEE Trans. Neural. Syst. Rehabil. Eng. 2022, 30, 1401–1411. [Google Scholar] [CrossRef] [PubMed]
- Rojek, I.; Mikołajewski, D.; Dostatni, E. Digital Twins in Product Lifecycle for Sustainability in Manufacturing and Maintenance. Appl. Sci. 2021, 11, 31. [Google Scholar] [CrossRef]
- Mikula, K.; Skrzypczak, D.; Izydorczyk, G.; Warchoł, J.; Moustakas, K.; Chojnacka, K.; Witek-Krowiak, A. 3D printing filament as a second life of waste plastics—A review. Environ. Sci. Pollut. Res. Int. 2021, 28, 12321–12333. [Google Scholar] [CrossRef]
- Bhat, C.; Kumar, A.; Lin, S.C.; Jeng, J.Y. Adaptive Mechanical Properties and Stretchability of Novel Chainmail Fabrics Based on Overlapping Tessellation Strategies. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=4485345 (accessed on 19 June 2023).
- Rojek, I.; Kopowski, J.; Kotlarz, P.; Dorożyński, J.; Dostatni, E.; Mikołajewski, D. Deep Learning in Design of Semi-Automated 3D Printed Chainmail with Pre-Programmed Directional Functions for Hand Exoskeleton. Appl. Sci. 2022, 12, 8106. [Google Scholar] [CrossRef]
- Rojek, I.; Mikołajewski, D.; Macko, M.; Szczepański, Z.; Dostatni, E. Optimization of Extrusion-Based 3D Printing Process Using Neural Networks for Sustainable Development. Materials 2021, 14, 2737. [Google Scholar] [CrossRef]
- Burduk, R.; Rojek, I.; Mikołajewska, E.; Mikołajewski, D. Post-Stroke Gait Classification Based on Feature Space Transformation and Data Labeling. Appl. Sci. 2022, 12, 11346. [Google Scholar] [CrossRef]
- Prokopowicz, P.; Mikołajewski, D.; Tyburek, K.; Mikołajewska, E. Computational gait analysis for post-stroke rehabilitation purposes using fuzzy numbers, fractal dimension and neural networks. Bull. Pol. Acad. Sci. Tech. Sci. 2020, 68, 191–198. [Google Scholar]
- Mikołajewska, E.; Prokopowicz, P.; Mikolajewski, D. Computational gait analysis using fuzzy logic for everyday clinical purposes-preliminary findings. Bio-Algorithms Med-Syst. 2017, 13, 37–42. [Google Scholar] [CrossRef]
- Rojek, I.; Macko, M.; Mikołajewski, D.; Saga, M.; Burczynski, T. Modern methods in the field of machine modeling and simulation as a research and practical issue related to Industry 4.0. Bull. Pol. Acad. Sci. Tech. Sci. 2021, 69, e136719. [Google Scholar] [CrossRef]
- Rahmani Dabbagh, S.; Ozcan, O.; Tasoglu, S. Machine learning-enabled optimization of extrusion-based 3D printing. Methods 2022, 206, 27–40. [Google Scholar] [CrossRef] [PubMed]
- Rojek, I.; Mikołajewski, D.; Kotlarz, P.; Macko, M.; Kopowski, J. Intelligent system supporting technological process planning for machining and 3D printing. Bull. Pol. Acad. Sci. Tech. Sci. 2021, 69, e136722. [Google Scholar]
- Mikolajczyk, T.; Mikołajewska, E.; Al-Shuka, H.F.N.; Malinowski, T.; Kłodowski, A.; Pimenov, D.Y.; Paczkowski, T.; Hu, F.; Giasin, K.; Mikołajewski, D.; et al. Recent Advances in Bipedal Walking Robots: Review of Gait, Drive, Sensors and Control Systems. Sensors 2022, 22, 4440. [Google Scholar] [CrossRef]
- Prokopowicz, P.; Mikołajewski, D.; Mikołajewska, E.; Kotlarz, P. Fuzzy system as an assessment tool for analysis of the health-related quality of life for the people after stroke. In Artificial Intelligence and Soft Computing, Proceedings of the 16th International Conference, ICAISC 2017, Zakopane, Poland, 11–15 June 2017; Lecture Notes in Computer Science (Including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer International Publishing: Berlin/Heidelberg, Germany, 2017; Volume 10245, pp. 710–721. [Google Scholar]
- Mikołajewska, E. Associations between results of post-stroke NDT-Bobath rehabilitation in gait parameters, ADL and hand functions. Adv. Clin. Exp. Med. 2013, 22, 731–738. [Google Scholar]
- Kawala-Janik, A.; Bauer, W.; Al-Bakri, A.; Haddix, C.; Yuvaraj, R.; Cichon, K.; Podraza, W. Implementation of Low-Pass Fractional Filtering for the Purpose of Analysis of Electroencephalographic Signals. In Non-Integer Order Calculus and Its Applications, Proceedings of the 9th International Conference on Non-Integer Order Calculus and Its Applications, Łódź, Poland, 11–13 October 2017; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; Volume 496, pp. 63–73. [Google Scholar]
- Browarska, N.; Kawala-Sterniuk, A.; Zygarlicki, J.; Podpora, M.; Pelc, M.; Martinek, R.; Gorzelanczyk, E.J. Comparison of Smoothing Filters’ Influence on Quality of Data Recorded with the Emotiv EPOC Flex Brain-Computer Interface Headset during Audio Stimulation. Brain Sci. 2021, 11, 98. [Google Scholar] [CrossRef]
- Kawala-Sterniuk, A.; Pelc, M.; Martinek, R.; Wójcik, G.M. Editorial: Currents in biomedical signals processing—Methods and applications. Front. Neurosci. 2022, 16, 989400. [Google Scholar] [CrossRef]
- Schneider, P.; Wójcik, G.M.; Kawiak, A.; Kwasniewicz, L.; Wierzbicki, A. Modeling and Comparing Brain Processes in Message and Earned Source Credibility Evaluation. Front. Hum. Neurosci. 2022, 16, 808382. [Google Scholar] [CrossRef]
- Using Artificial Intelligence to Control Digital Manufacturing. MIT News. Available online: https://news.mit.edu/2022/artificial-intelligence-3-d-printing-0802 (accessed on 11 July 2023).
- Chen, D.; Luo, D.; Xu, W.; Luo, C.; Shen, L.; Yan, X.; Wang, T. Re-perceive 3D printing with Artificial Intelligence. Addit. Manuf. 2023, 1, 443–450. [Google Scholar]
- Krauss, S. Go Beyond Spare Parts with 3D Printing and Machine Learning. Available online: https://www.engineering.com/AdvancedManufacturing/ArticleID/15969/Go-Beyond-Spare-Parts-with-3D-Printing-and-Machine-Learning.aspx (accessed on 11 July 2023).



{kind=link}
{kind=link}
| Year | Milestone |
|---|---|
| 1984 | StereoLithography Apparatus (SLA) |
| 1986 | Selective Laser Sintering (SLS) |
| 1987 | Digital Light Processing (DLP) |
| 1988 | Fused Deposition Modelling (FDM) Materials: ABS, PLA, nylon |
| 1994 | Color Jet Printing (CJP) |
| 1995 | Selective Laser Melting (SLM) Materials: copper, aluminum, stainless steel, tool steel, cobalt, chromium, titanium |
| 1998 | PolyJet, Multi Jet Modeling (MJM, DigiJet), wielokolorowy, wielomateriałowy Materials: resins and composite materials cured by UV light |
| 2001 | Electron Beam Melting (EBM) |
| 2002 | Direct Metal Laser Sintering (DLMS) Materials: e.g., CoCrMo |
| 2004 | RepRap—Replicating Rapid Prototype |
| 2006 | Home 3D printers |
| Bioink 3D printing | |
| 2010 | Cake printing printer |
| 2013 | Liberator—printed weapon |
| 2014 | The first completely printed engine |
| Concrete printing | |
| Wood-like printing | |
| 2015 | Lithography-based Ceramic Manufacturing (LCM) |
| Printing from chocolate, salt, sugar, algae, vegetable sheets, and purees, printing burgers, pizzas, cookies, and pancakes | |
| Printed circuit printer | |
| Fabric printing | |
| 2016 | Printing jelly beans with different flavors, vegan and gluten free |
| 2017 | Work on 3D printing from graphene Nylon 680—3D printing filament enriched with graphene |
| 2018 | Biocompatible ABS Medical filament |
| 2020 | 3D printed antiviral mask |
| Positive | Negative | |
|---|---|---|
| Strengths | Weaknesses | |
| Internal | Reduced cost of end products Quick adaptation of solutions, including from the market More efficient use of production, storage, and transport capacities Recyclable Rapid prototyping Creating semi-finished products for further stages of production Creating objects with shapes and properties unavailable with traditional methods Faster replacement of solutions with their subsequent versions Printing items that are no longer available (e.g., discontinued spare parts) Inclusion in the Industry 4.0 Paradigm | High costs of printers for printing with metal powders and printing with combined materials (including bio-ink with support/scaffold) The need for highly specialized adaptation in the case of the most advanced traditional technologies (fire-resistant, shape-retaining, etc.) |
| Opportunities | Threats | |
| External | Better resource economy Possibility of quick modernization of existing solutions to meet the needs of a specific task Consumables can be printed on-site almost instantaneously (also without documentation, thanks to reverse engineering). Possibility to print elements from combined materials, e.g., printed circuit boards Improved functionality | High cost of specialists Unauthorized access to hardware and software; Limited cyber security A flood of cheap counterfeits of inferior quality Legal problems: public procurement law, obtaining certification for printed products, lack of copyright protection Ethical issues: the use of the project after a quick modification is contrary to the intention of the author. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rojek, I.; Dorożyński, J.; Mikołajewski, D.; Kotlarz, P. Overview of 3D Printed Exoskeleton Materials and Opportunities for Their AI-Based Optimization. Appl. Sci. 2023, 13, 8384. https://doi.org/10.3390/app13148384
Rojek I, Dorożyński J, Mikołajewski D, Kotlarz P. Overview of 3D Printed Exoskeleton Materials and Opportunities for Their AI-Based Optimization. Applied Sciences. 2023; 13(14):8384. https://doi.org/10.3390/app13148384
Chicago/Turabian StyleRojek, Izabela, Janusz Dorożyński, Dariusz Mikołajewski, and Piotr Kotlarz. 2023. "Overview of 3D Printed Exoskeleton Materials and Opportunities for Their AI-Based Optimization" Applied Sciences 13, no. 14: 8384. https://doi.org/10.3390/app13148384