
Estimation of Intelligent Commercial Vehicle Sideslip Angle Based on Steering Torque

Abstract
:1. Introduction
2. Materials and Methods
2.1. Dynamic Models of EHPS System
2.1.1. Mechanical System Dynamic Model
2.1.2. Hydraulic System
2.1.3. Steering Load System
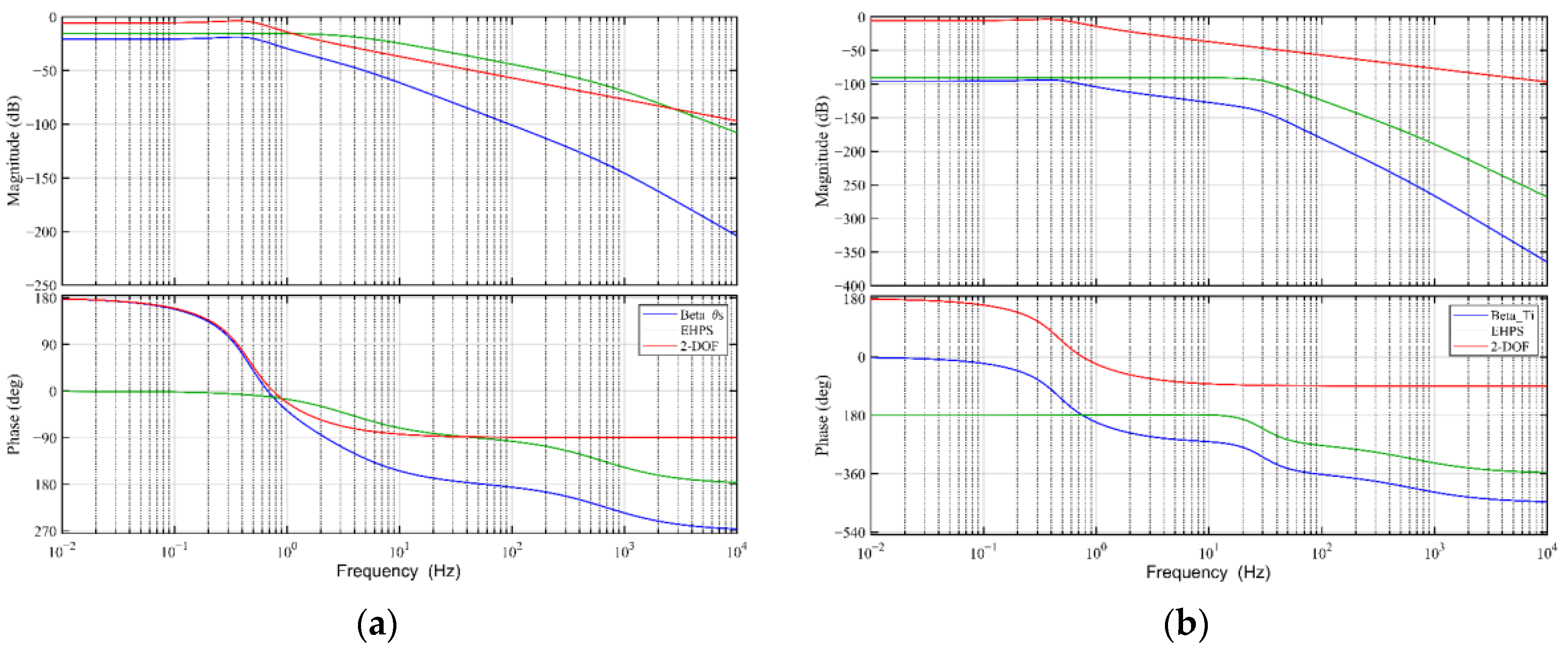
2.1.4. Steering System Characteristic Analysis
2.2. Dynamic Models of 2-DOF Vehicle
- Vehicle driving on a flat road, no vertical road uneven input;
- Ignore the steering transmission system and apply the input directly to the wheel;
- Longitudinal velocity as a constant, and ignore the effect of aerodynamics;
- The lateral acceleration is limited to less than 0.4 g, and the tire cornering characteristics are in a linear range.
2.3. Transfer Function Analysis of Vehicle Dynamics Model
3. Design of EKF State Observer
- Time update
- 2.
- Measurement update
4. Results and Discussion
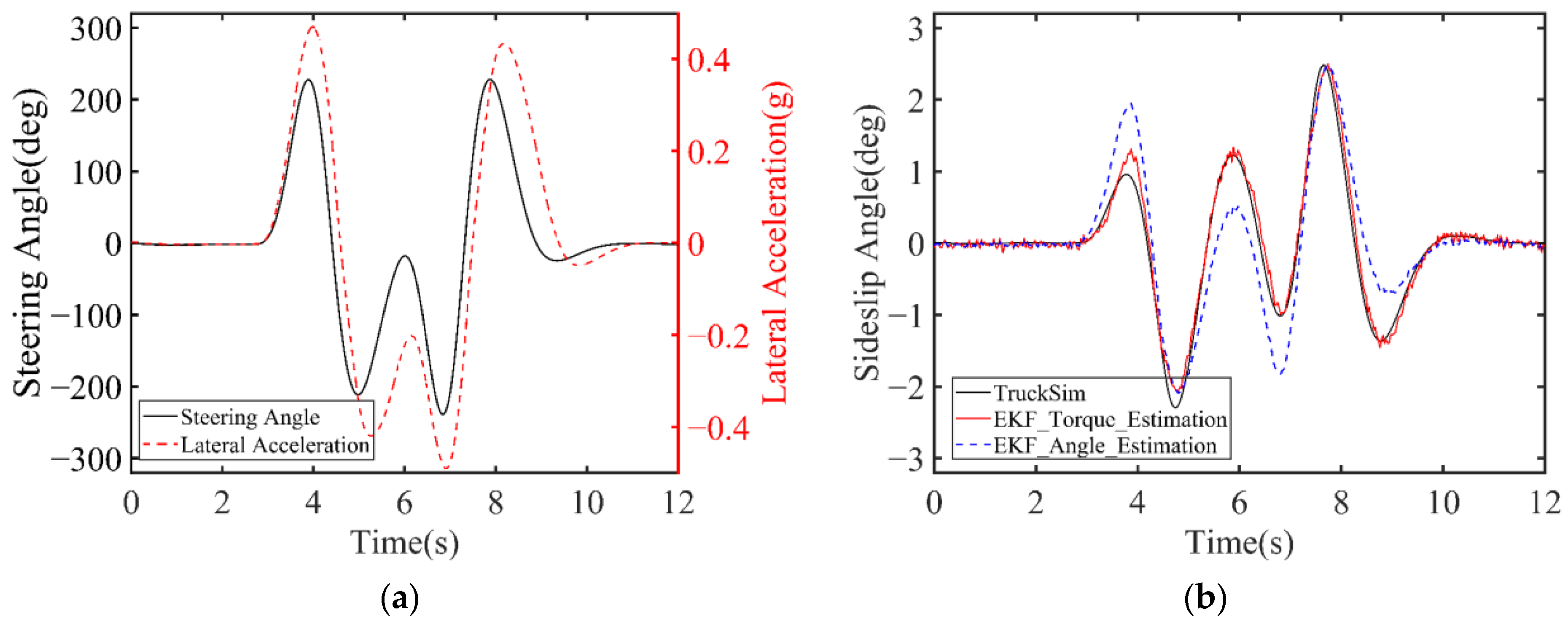
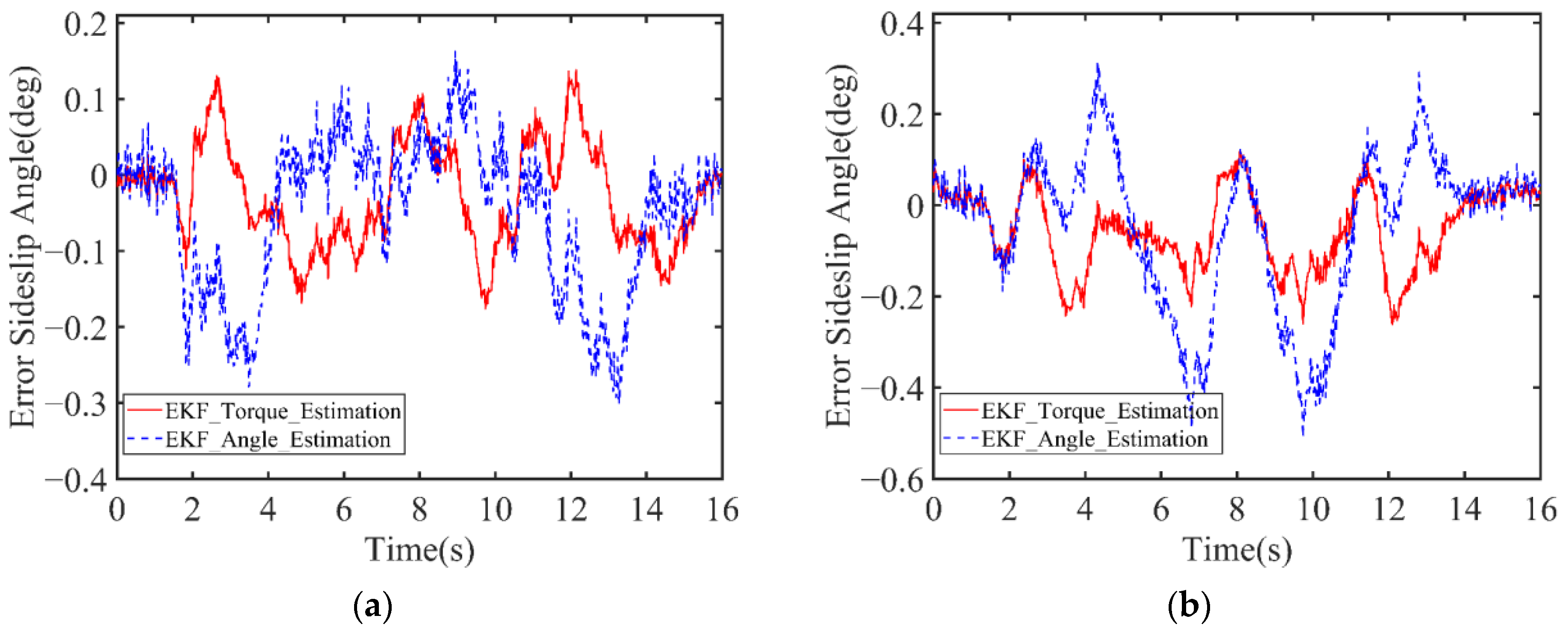
4.1. Simulation Results
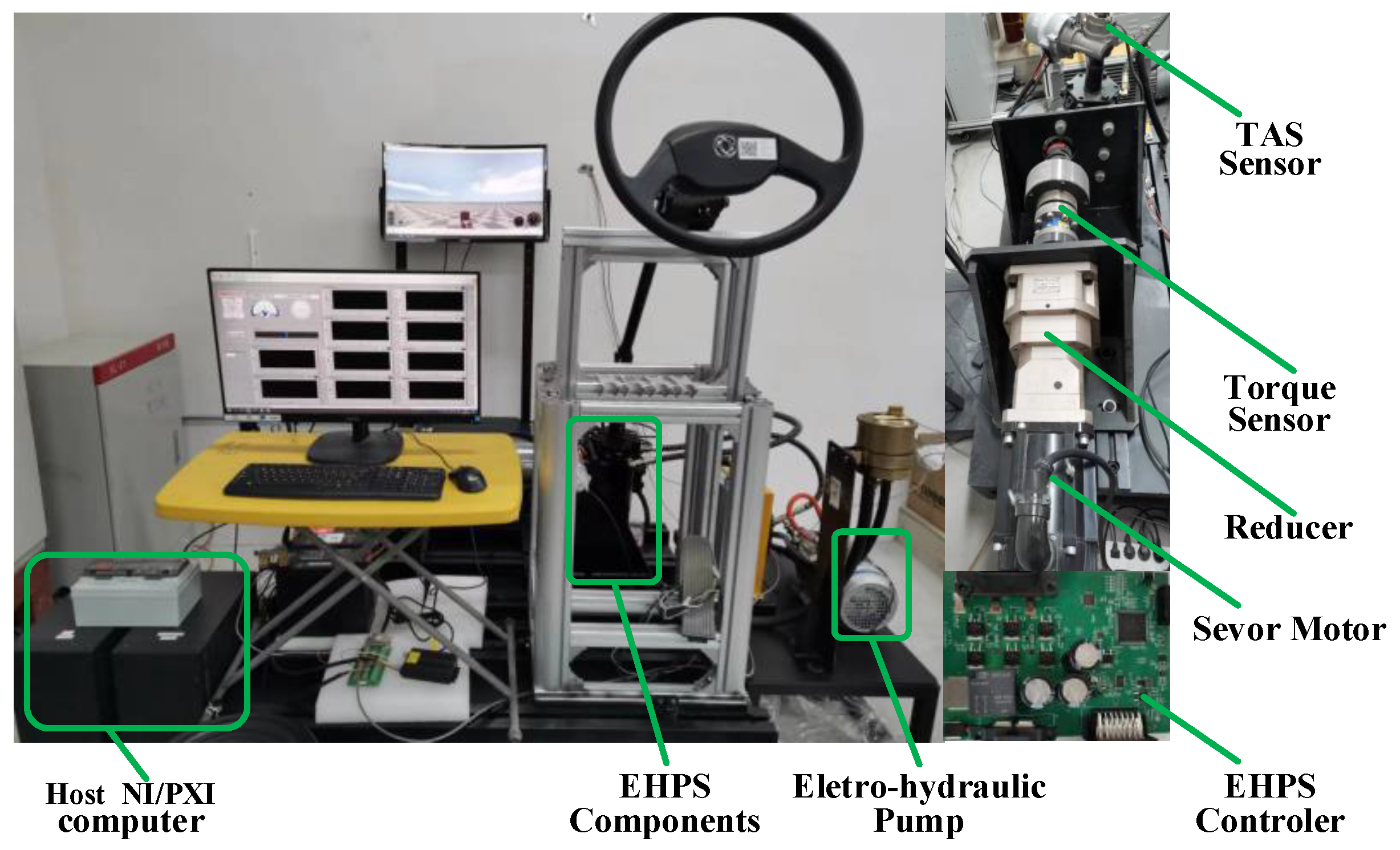
4.2. Test Bench Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cheng, S.; Li, L.; Chen, J. Fusion Algorithm Design Based on Adaptive SCKF and Integral Correction for Side-Slip Angle Observation. IEEE Trans. Ind. Electron. 2018, 65, 5754–5763. [Google Scholar] [CrossRef]
- Zhao, B.; Xu, N.; Chen, H.; Guo, K.; Huang, J. Stability control of electric vehicles with in-wheel motors by considering tire slip energy. Mech. Syst. Signal Process. 2019, 118, 340–359. [Google Scholar] [CrossRef]
- Xia, X.; Xiong, L.; Lu, Y.; Gao, L.; Yu, Z. Vehicle sideslip angle estimation by fusing inertial measurement unit and global navigation satellite system with heading alignment. Mech. Syst. Signal Process. 2021, 150, 107290. [Google Scholar] [CrossRef]
- Wang, Y.; Geng, K.; Xu, L.; Ren, Y.; Dong, H.; Yin, G. Estimation of Sideslip Angle and Tire Cornering Stiffness Using Fuzzy Adaptive Robust Cubature Kalman Filter. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 1451–1462. [Google Scholar] [CrossRef]
- Tin Leung, K.; Whidborne, J.F.; Purdy, D.; Dunoyer, A. A review of ground vehicle dynamic state estimations utilising GPS/INS. Veh. Syst. Dyn. 2011, 49, 29–58. [Google Scholar] [CrossRef]
- Anderson, R.; Bevly, D.M. Using GPS with a model-based estimator to estimate critical vehicle states. Veh. Syst. Dyn. 2010, 48, 1413–1438. [Google Scholar] [CrossRef]
- Cheng, S.; Wang, Z.; Yang, B.; Nakano, K. Convolutional Neural Network-Based Lane-Change Strategy via Motion Image Representation for Automated and Connected Vehicles. IEEE Trans. Neural Netw. Learn. Syst. 2023, 1–12. [Google Scholar] [CrossRef]
- Liu, W.; Xiong, L.; Xia, X.; Lu, Y.; Gao, L.; Song, S. Vision-aided intelligent vehicle sideslip angle estimation based on a dynamic model. IET Intell. Transp. Syst. 2020, 14, 1183–1189. [Google Scholar] [CrossRef]
- Kanghyun, N.; Fujimoto, H.; Hori, Y. Lateral Stability Control of In-Wheel-Motor-Driven Electric Vehicles Based on Sideslip Angle Estimation Using Lateral Tire Force Sensors. IEEE Trans. Veh. Technol. 2012, 61, 1972–1985. [Google Scholar] [CrossRef]
- Guo, J.; Luo, Y.; Li, K.; Dai, Y. Coordinated path-following and direct yaw-moment control of autonomous electric vehicles with sideslip angle estimation. Mech. Syst. Signal Process. 2018, 105, 183–199. [Google Scholar] [CrossRef]
- Wang, Z.; Qin, Y.; Gu, L.; Dong, M. Vehicle System State Estimation Based on Adaptive Unscented Kalman Filtering Combing with Road Classification. IEEE Access 2017, 5, 27786–27799. [Google Scholar] [CrossRef]
- Cheng, C.; Cebon, D. Parameter and state estimation for articulated heavy vehicles. Veh. Syst. Dyn. 2011, 49, 399–418. [Google Scholar] [CrossRef]
- Gadola, M.; Chindamo, D.; Romano, M.; Padula, F. Development and validation of a Kalman filter-based model for vehicle slip angle estimation. Veh. Syst. Dyn. 2013, 52, 68–84. [Google Scholar] [CrossRef] [Green Version]
- Piyabongkarn, D.; Rajamani, R.; Grogg, J.A.; Lew, J.Y. Development and Experimental Evaluation of a Slip Angle Estimator for Vehicle Stability Control. IEEE Trans. Control Syst. Technol. 2009, 17, 78–88. [Google Scholar] [CrossRef]
- Leung, K.T.; Whidborne, J.F.; Purdy, D.; Barber, P. Road vehicle state estimation using low-cost GPS/INS. Mech. Syst. Signal Process. 2011, 25, 1988–2004. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.; Yao, M.; Ma, H.; Jia, W. Improving Accuracy of the Vehicle Attitude Estimation for Low-Cost INS/GPS Integration Aided by the GPS-Measured Course Angle. IEEE Trans. Intell. Transp. Syst. 2013, 14, 553–564. [Google Scholar] [CrossRef]
- Yoon, J.-H.; Peng, H. A Cost-Effective Sideslip Estimation Method Using Velocity Measurements from Two GPS Receivers. IEEE Trans. Veh. Technol. 2014, 63, 2589–2599. [Google Scholar] [CrossRef]
- Xiong, L.; Xia, X.; Lu, Y.; Liu, W.; Gao, L.; Song, S.; Yu, Z. IMU-Based Automated Vehicle Body Sideslip Angle and Attitude Estimation Aided by GNSS Using Parallel Adaptive Kalman Filters. IEEE Trans. Veh. Technol. 2020, 69, 10668–10680. [Google Scholar] [CrossRef]
- Xia, X.; Hashemi, E.; Xiong, L.; Khajepour, A. Autonomous Vehicle Kinematics and Dynamics Synthesis for Sideslip Angle Estimation Based on Consensus Kalman Filter. IEEE Trans. Control Syst. Technol. 2023, 31, 179–192. [Google Scholar] [CrossRef]
- Huang, S.; Cao, W.; Qian, R.; Liu, Y.; Ji, X. Front wheel angle tracking control research of intelligent heavy vehicle steering system. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 235, 3454–3467. [Google Scholar] [CrossRef]
- Wu, J.; Zhao, Y.; Ji, X.; Liu, Y.; Zhang, L. Generalized internal model robust control for active front steering intervention. Chin. J. Mech. Eng. 2015, 28, 285–293. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| /(kg·m2) | 0.0258 | 459 | |
| /(Nm·s/rad) | 0.742 | /kg | 8.07 |
| /(Nm/rad) | 143.2 | /(Nm/s) | 35,283 |
| /m | 0.05 | /(Nm/rad) | 5730 |
| 0.5 | /() | 880 | |
| /() | 1.4 × 105 | /() | 9.4 × 10−3 |
| 0.12 | 1.6 | 2.35 × 104 | −0.3028 | 0.012 | 1.6 | 12,710 | −0.3028 |
| Parameters | Symbols | Values |
|---|---|---|
| Sprung mass | 4455 (kg) | |
| Front axle unsprung mass | 607.3 (kg) | |
| Rear axle unsprung mass | 1144 (kg) | |
| Distance between the front axle and the vehicle gravity center | 1.25 (m) | |
| Distance between the rear axle and the vehicle gravity center | 3.75 (m) | |
| Yaw moment inertia of the whole vehicle | 34,802.6 () | |
| Front cornering stiffness | ) | |
| Rear cornering stiffness | ) |
| Maneuver | Method | Max Error (°) | MAE (°) | RMSE (°) |
|---|---|---|---|---|
| Double line change u = 50 km/h µ = 0.85 | Steering torque estimation | −0.175 | 0.0613 | 0.0733 |
| Steering angle estimation | −0.3 | 0.0805 | 0.1112 | |
| Double line change u = 65 km/h µ = 0.75 | Steering torque estimation | −0.26 | 0.0822 | 0.1032 |
| Steering angle estimation | −0.51 | 0.1257 | 0.1739 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Yang, Y.; Wang, X.; Zhao, Y.; Wang, C. Estimation of Intelligent Commercial Vehicle Sideslip Angle Based on Steering Torque. Appl. Sci. 2023, 13, 7974. https://doi.org/10.3390/app13137974
Li Y, Yang Y, Wang X, Zhao Y, Wang C. Estimation of Intelligent Commercial Vehicle Sideslip Angle Based on Steering Torque. Applied Sciences. 2023; 13(13):7974. https://doi.org/10.3390/app13137974
Chicago/Turabian StyleLi, Yafei, Yiyong Yang, Xiangyu Wang, Yongtao Zhao, and Chengbiao Wang. 2023. "Estimation of Intelligent Commercial Vehicle Sideslip Angle Based on Steering Torque" Applied Sciences 13, no. 13: 7974. https://doi.org/10.3390/app13137974