
Design of Man-Machine Synergic Lunar Coring Device and Its Coring Dynamic Analysis


Abstract
:1. Introduction
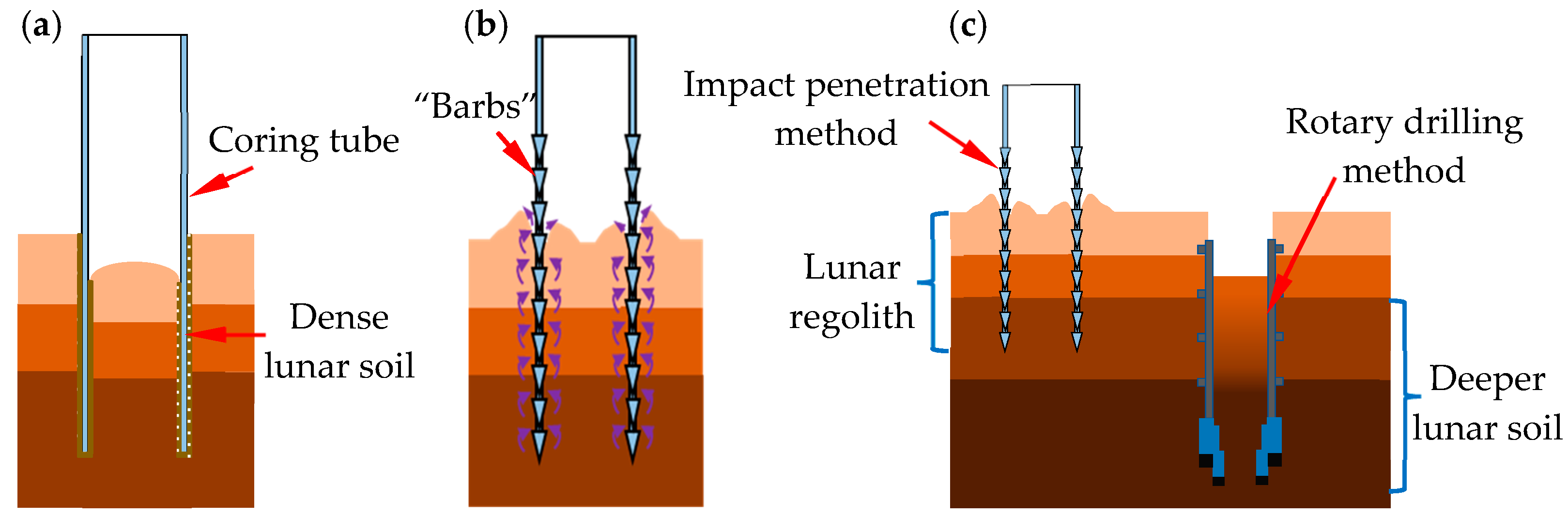
2. Process Analysis of Coring
3. Man-Machine Synergic Lunar Coring Device Scheme Design
3.1. Design Requirements for Coring Devices
- (1)
- Astronauts’ handheld coring device structure should be simple, easy to operate, and low power consumption.
- (2)
- The coring device should have extremely high stability to ensure that the coring missions are carried out safely and stably.
- (3)
- The coring device’s impact frequency and energy can be adjusted according to the sampling depth.
- (4)
- The sampling method of the coring device (impact penetration and rotary drilling) can be changed according to the sampling environment.
- (5)
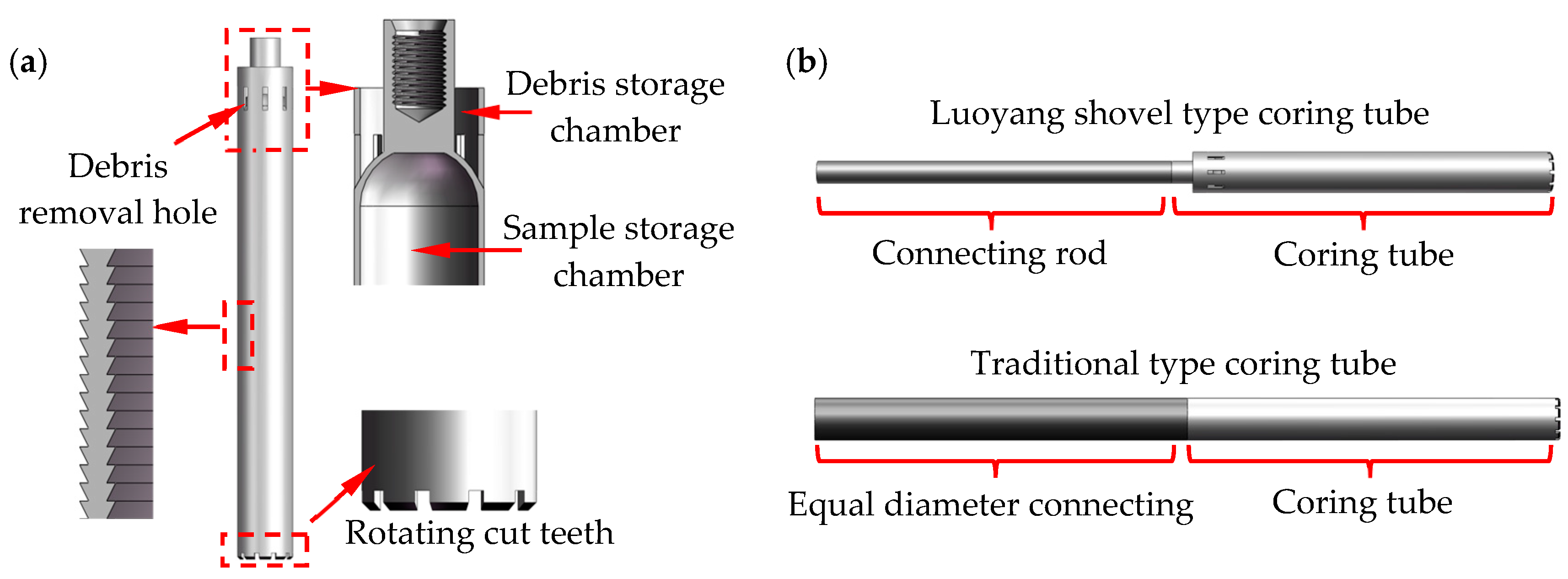
- The coring or drilling tube can be assembled freely to achieve depth sampling.
- (6)
- The handheld coring device is easy to assemble and disassemble and can be mounted on the lander or rover for autonomous operation.
3.2. Structure Design of the Coring Device
3.2.1. Handheld Dual-Mode Coring Device
3.2.2. Man-Machine Synergic Coring Device
4. Dynamic Analysis and Verification of the Coring Device
5. Conclusions
- (1)
- In response to the problem of the low coring rate of the static impact penetration method, a composite coring method of high-frequency impact penetration and rotary drilling coring is proposed. According to the simulation analysis, the impact-rotary drilling method is the more effective way to achieve rock crushing and coring in the lunar regolith.
- (2)
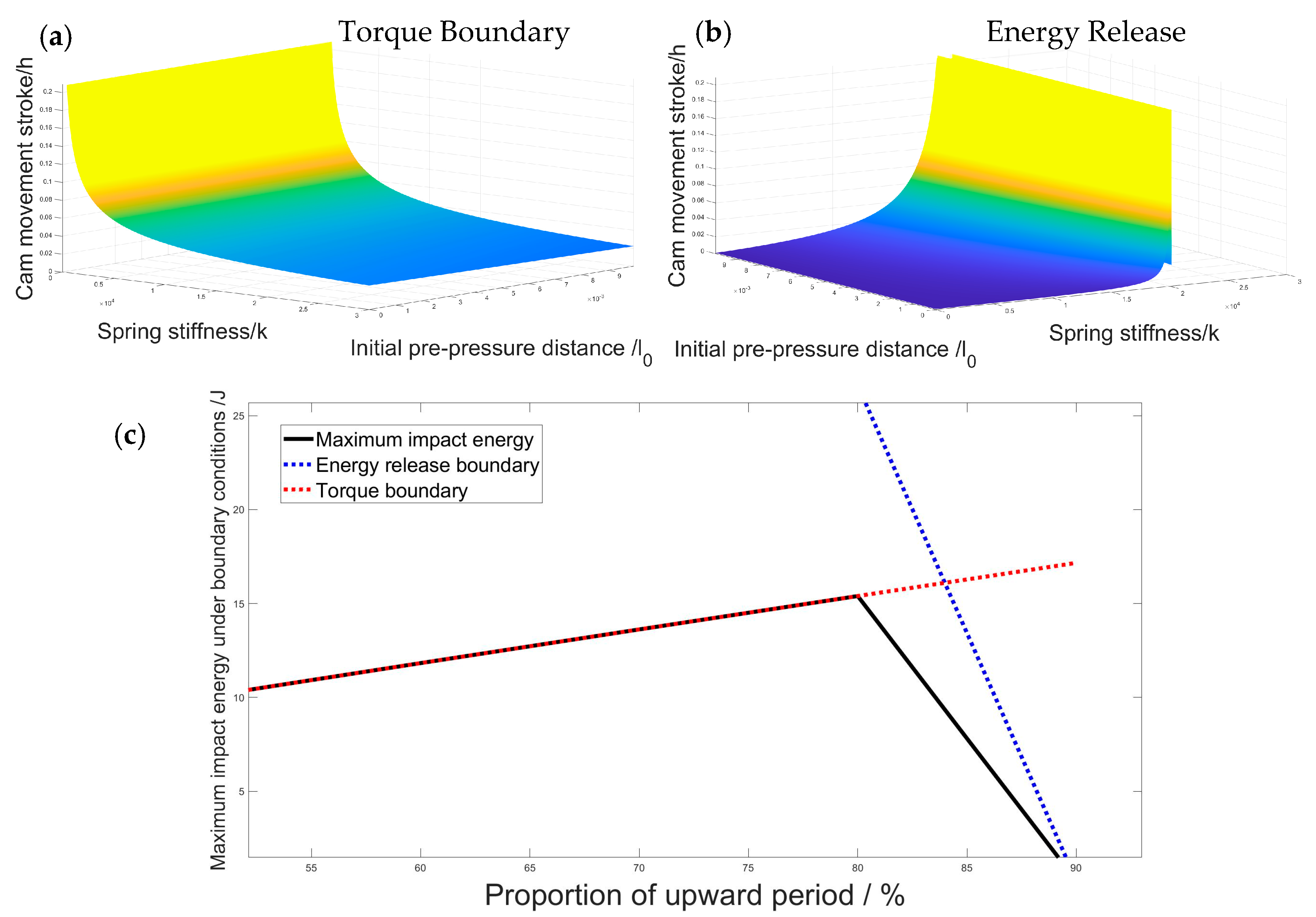
- The coring device for astronauts’ handheld operation was designed according to the requirements of coring exploration for the manned lunar landing. The coring device can change the impact frequency (0~20 Hz), impact energy (5~15 J), and rotation speed (0~300 rpm) to adapt to different working environments during the operation. The coring tube and connecting rod can be interconnected to obtain deep lunar soil samples.
- (3)
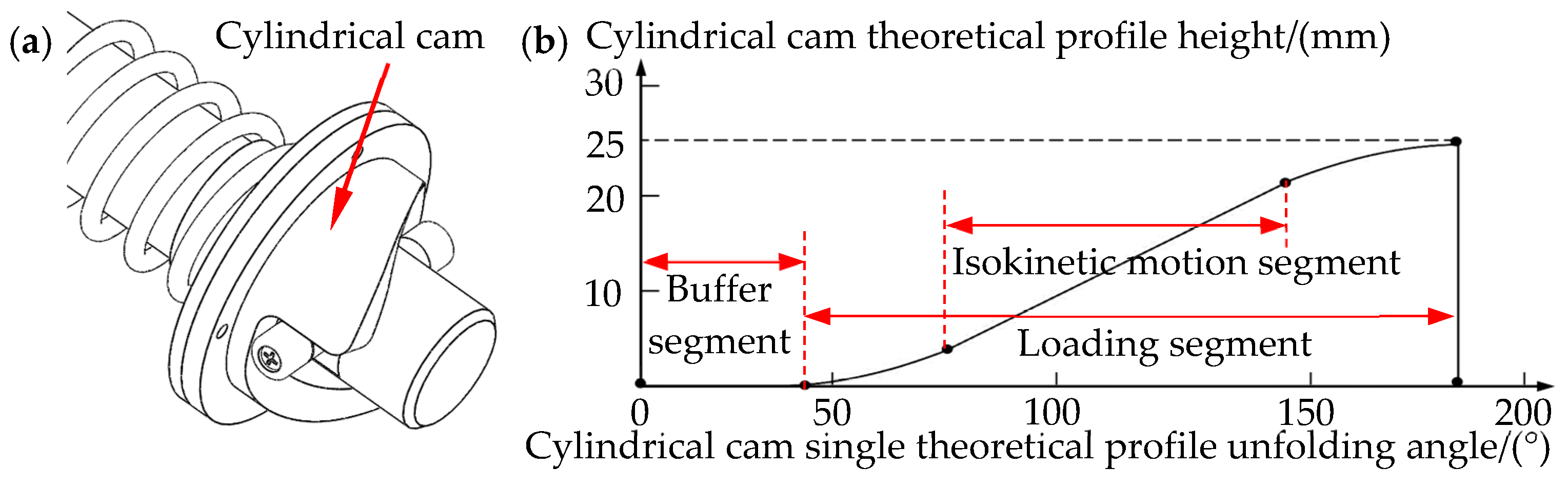
- The impact module of the coring device was simulated and analyzed for its ability to crush rocks in the lunar regolith, and the optimal impact structure based on the spring energy storage scheme was determined. Additionally, the impact process is simulated by ANSYS explicit dynamics to determine the impact-crushing effect of the coring device on the lunar rocks. Under the action of the maximum impact energy (14.9 J), it can produce a plastic deformation effect of 0.47 mm on the lunar rocks within a time period of 5 ms.
- (4)
- Based on the handheld coring device, a man-machine synergic coring device was designed that can be carried on the lander or rover to address the many constraints of astronauts sampling on the lunar surface. This coring device provides more significant drilling pressure and counter torque, significantly reducing the work effort of the astronauts and increasing the sampling depth.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Halliday, A.N. Terrestrial accretion rates and the origin of the Moon. Earth Planet. Sci. Lett. 2000, 176, 17–30. [Google Scholar] [CrossRef]
- Kenyo, U.; Hasumi, H.; Ogawa, M. Effects of magma-generation and migration on the expansion and contraction history of the Moon. Earth Planets Space 2022, 74, 78. [Google Scholar] [CrossRef]
- Kereszturi, A. Polar Ice on the Moon. In Encyclopedia of Lunar Science; Cudnik, B., Ed.; Springer International Publishing: Cham, Switzerland, 2020; pp. 1–9. [Google Scholar]
- Spudis, P.D.; Bussey, D.B.J.; Baloga, S.M.; Cahill, J.T.S.; Glaze, L.S.; Patterson, G.W.; Raney, R.K.; Thompson, T.W.; Thomson, B.J.; Ustinov, E.A. Evidence for water ice on the Moon: Results for anomalous polar craters from the LRO Mini-RF imaging radar. J. Geophys. Res. Planets 2013, 118, 2016–2029. [Google Scholar] [CrossRef]
- Boazman, S.; Kereszturi, A.; Heather, D.; Sefton-Nash, E.; Orgel, C.; Tomka, R.; Houdou, B.; Lefort, X. Analysis of the Lunar South Polar Region for PROSPECT, NASA/CLPS; Copernicus Meetings: Palacio de Congresos de Granada, Spain, 2022. [Google Scholar]
- Slyuta, E. The Luna program. In Sample Return Missions; Elsevier: Amsterdam, The Netherlands, 2021; pp. 37–78. [Google Scholar]
- Zhang, T.; Xu, K.; Yao, Z.; Ding, X.; Zhao, Z.; Hou, X.; Pang, Y.; Lai, X.; Zhang, W.; Liu, S.; et al. The progress of extraterrestrial regolith-sampling robots. Nat. Astron. 2019, 3, 487–497. [Google Scholar] [CrossRef]
- Wen, Y.; Zhang, G.; Xie, H.; Gao, M.; Zhang, X.; Wang, Y.; Li, C. Design and Dynamic Analysis of the Wire-Line Coring Robot for Deep Lunar Rocks. Appl. Sci. 2023, 13, 1722. [Google Scholar] [CrossRef]
- Sun, W.; Wang, Z.; Zhao, Q. Lunar Exploration and Development Vision. Aerosp. China 2020, 21, 28–34. [Google Scholar]
- Guardabasso, P.; Paternostro, S.; Bedialauneta, P.; Fonteyne, R. Lunar landing necessary building blocks and good practices for a sustainable development of human lunar activities. Acta Astronaut. 2023, 202, 782–790. [Google Scholar] [CrossRef]
- Scherer, L. The Apollo Missions. Highlights Astron. 1971, 2, 125–141. [Google Scholar] [CrossRef] [Green Version]
- MacIsaac, D. NASA Returns to the Moon: The Artemis Missions. Phys. Teach. 2023, 61, 239. [Google Scholar] [CrossRef]
- Crane, L. A Different Kind of Space Race. New Sci. 2022, 255, 39–41. [Google Scholar] [CrossRef]
- Gross, J. From Apollo to Artemis and beyond: How the Apollo Next Generation Sample Analyses (ANGSA) program helps to prepare for future sample missions to the Moon and beyond. In Proceedings of the AAS/Division for Planetary Sciences Meeting Abstracts, London, ON, Canada, 2–7 October 2022; p. 110.103. [Google Scholar]
- Xu, L.; Li, H.; Pei, Z.; Zou, Y.; Wang, C. A Brief Introduction to the International Lunar Research Station Program and the Interstellar Express Mission. Chin. J. Space Sci. 2022, 42, 511–513. [Google Scholar] [CrossRef]
- Biswal, M.; Malaya, K.; Gomez-Fernandez, D.; Das, N.B.; Kumar V, R. Design Study and Validation of Mars Underground Habitat for Human Settlement on Mars. In Proceedings of the AIAA Propulsion and Energy 2021 Forum, Virtual Event, 9–11 August 2021; p. 3725. [Google Scholar]
- Kereszturi, A.; Bradak, B.; Chatzitheodoridis, E.; Ujvari, G. Indicators and Methods to Understand Past Environments from ExoMars Rover Drills. Orig. Life Evol. Biosph. 2016, 46, 435–454. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.; Yang, R.; Wang, Q. Laboratory construction and curation scheme for returned samples of the chang’e-5 mission. Geosci. Lett. 2022, 9, 19. [Google Scholar] [CrossRef]
- Zhang, T.; Wang, B.; Wei, H.; Zhang, Y.; Chao, C.; Xu, K.; Ding, X.; Hou, X.; Zhao, Z. Review on planetary regolith-sampling technology. Prog. Aerosp. Sci. 2021, 127, 100760. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, G.; Xie, H.; Gao, M.; Wen, Y. A Review of Sampling Exploration and Devices for Extraterrestrial Celestial Bodies. Space Sci. Rev. 2022, 218, 59. [Google Scholar] [CrossRef]
- Chen, H.; Li, L.; Cui, Y.; Jiang, S. A novel lunar soil coring approach based on particle unidirectional flow effect to reduce drag and increase efficiency. Adv. Space Res. 2021, 68, 117–133. [Google Scholar] [CrossRef]
- Chen, H.; Liu, R.; Ma, C.; Jiang, S. Design of handheld corer for lunar regolith based on particle directional flow method. J. Deep Space Explor. 2020, 7, 164–170. [Google Scholar] [CrossRef]
- Sun, F.; Huo, X.; Mao, M.; Zhao, H.; Xu, F.; Zhang, W.; Chen, H.; Tang, J.; Zhang, X.; Liu, Y. Design of Double-Body Vibration Penetration Lunar Soil Sampler by Magnetic Driven. J. Deep Space Explor. 2022, 9, 157–164. [Google Scholar] [CrossRef]
- Delp, M.D.; Charvat, J.M.; Limoli, C.L.; Globus, R.K.; Ghosh, P. Apollo Lunar Astronauts Show Higher Cardiovascular Disease Mortality: Possible Deep Space Radiation Effects on the Vascular Endothelium. Sci. Rep. 2016, 6, 29901. [Google Scholar] [CrossRef] [Green Version]
- Braddock, M. Hazards of Lunar Regolith for Respiratory, Central Nervous System, Cardiovascular and Ocular Function. Hum. Factor Settl. Moon Interdiscip. Approach 2021, 9, 141–157. [Google Scholar] [CrossRef]
- Zacny, K.; Bar-Cohen, Y.; Brennan, M.; Briggs, G.; Cooper, G.; Davis, K.; Dolgin, B.; Glaser, D.; Glass, B.; Gorevan, S.; et al. Drilling systems for extraterrestrial subsurface exploration. Astrobiology 2008, 8, 665–706. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, D.; Cheng, Z.; Zhang, W.; Cui, J.; Wang, H. Numerical Modeling of Thermal Behavior during Lunar Soil Drilling. Aerospace 2023, 10, 472. [Google Scholar] [CrossRef]
- Korotev, R.L.; Haskin, L.A. Some lessons from Apollo for a sampling strategy on Mars for understanding the origin of the ancient igneous crust and the composition of the mantle. In Proceedings of the Lunar and Planetary Institute, Workshop on Mars Sample Return Science, Houston, TX, USA, 16–18 November 1987. [Google Scholar]
- Kereszturi, Á.; Duvet, L.; Gróf, G.; Gyenis, Á.; Gyenis, T.; Kapui, Z.; Kovács, B.; Maros, G. Characterization and first results of the planetary borehole-wall imager—Methods to develop for in-situ exploration. Open Astron. 2019, 28, 13–31. [Google Scholar] [CrossRef]
- Liang, J.; Tao, L.; Zhang, W.; Tang, J.; Pang, Y.; Jiang, S. Analysis of the lunar regolith sample obstruction in the Chang’E-5 drill and its improvement. Adv. Space Res. 2022, 69, 2248–2258. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, J.; Zhang, W.; Xu, B.; Duan, Z. Drill-soil penetration model and its application to lunar exploration. Adv. Space Res. 2022, 70, 3436–3449. [Google Scholar] [CrossRef]
- Xu, J.; Yuan, X.; Zhang, Y.; Yu, S.; Pang, Y.; Zhang, T.; Xu, K.; Ding, X. Real-time prediction of drilling forces inside lunar regolith based on recurrent neural networks. Acta Astronaut. 2022, 201, 259–273. [Google Scholar] [CrossRef]
- Zhao, D.; Cheng, Z.; Zeng, K.; Hu, M.; Gao, X. Optimized design of high-efficiency lunar soil sampling tube structure based on stress–strain law. Adv. Space Res. 2023, 71, 2128–2139. [Google Scholar] [CrossRef]
- Gao, Y.; Ellery, A.; Jaddou, M.; Vincent, J. Deployable wood wasp drill for planetary subsurface sampling. In Proceedings of the 2006 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2006; p. 8. [Google Scholar]
- Gao, Y.; Ellery, A.; Jaddou, M.; Vincent, J.; Eckersley, S. Planetary micro-penetrator concept study with biomimetric drill and sampler design. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 875–885. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Impact Frequency | Impact Energy | Rotational Speed | Single Tube Length | Inner Diameter of Coring Tube | Coring Rate |
|---|---|---|---|---|---|---|
| Parameters | 0~20 Hz | 5–15 J | 0~300 rpm | 350 mm | 40 mm | 85% |
| Weight/kg | Maximum Input Power/kw | Effective Sampling Depth/m | ||
|---|---|---|---|---|
| Handheld coring device | 400 210 380 | 25 | 1.5 | 2 |
| Synergic coring device | 820 800 1400 | 150 | 4 | 3 |
| Motor Torque Md (Nm) | Impact Frequency λ (Hz) | Cam Height h (mm) | Preload Height l0 (mm) | Spring Elastic Stiffness k (N/m) | Impact Mass m (kg) |
|---|---|---|---|---|---|
| 10 | 20 | 25 | 10 | 30,000 | 0.9 |
| Density ρ (kg/m3) | Shear Modulus G (GPa) | Tensile Strength T (MPa) | Compressive Strength fc (MPa) | Modulus of Elasticity E (GPa) | Poisson’s Ratio ν |
|---|---|---|---|---|---|
| 2164 | 4.437 | 1.107 | 70.27 | 12.27 | 0.38 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Zhang, G.; Gao, M.; Wen, Y.; Wang, Y. Design of Man-Machine Synergic Lunar Coring Device and Its Coring Dynamic Analysis. Appl. Sci. 2023, 13, 7961. https://doi.org/10.3390/app13137961
Zhang X, Zhang G, Gao M, Wen Y, Wang Y. Design of Man-Machine Synergic Lunar Coring Device and Its Coring Dynamic Analysis. Applied Sciences. 2023; 13(13):7961. https://doi.org/10.3390/app13137961
Chicago/Turabian StyleZhang, Xu, Guoqing Zhang, Mingzhong Gao, Yufeng Wen, and Yaohui Wang. 2023. "Design of Man-Machine Synergic Lunar Coring Device and Its Coring Dynamic Analysis" Applied Sciences 13, no. 13: 7961. https://doi.org/10.3390/app13137961