
Research on Mechanism Design and Kinematic Characteristics of Self-Propelled Photovoltaic Cleaning Robot



Abstract
:1. Introduction
1.1. Structural Design
1.2. Intelligent Control
- (1)
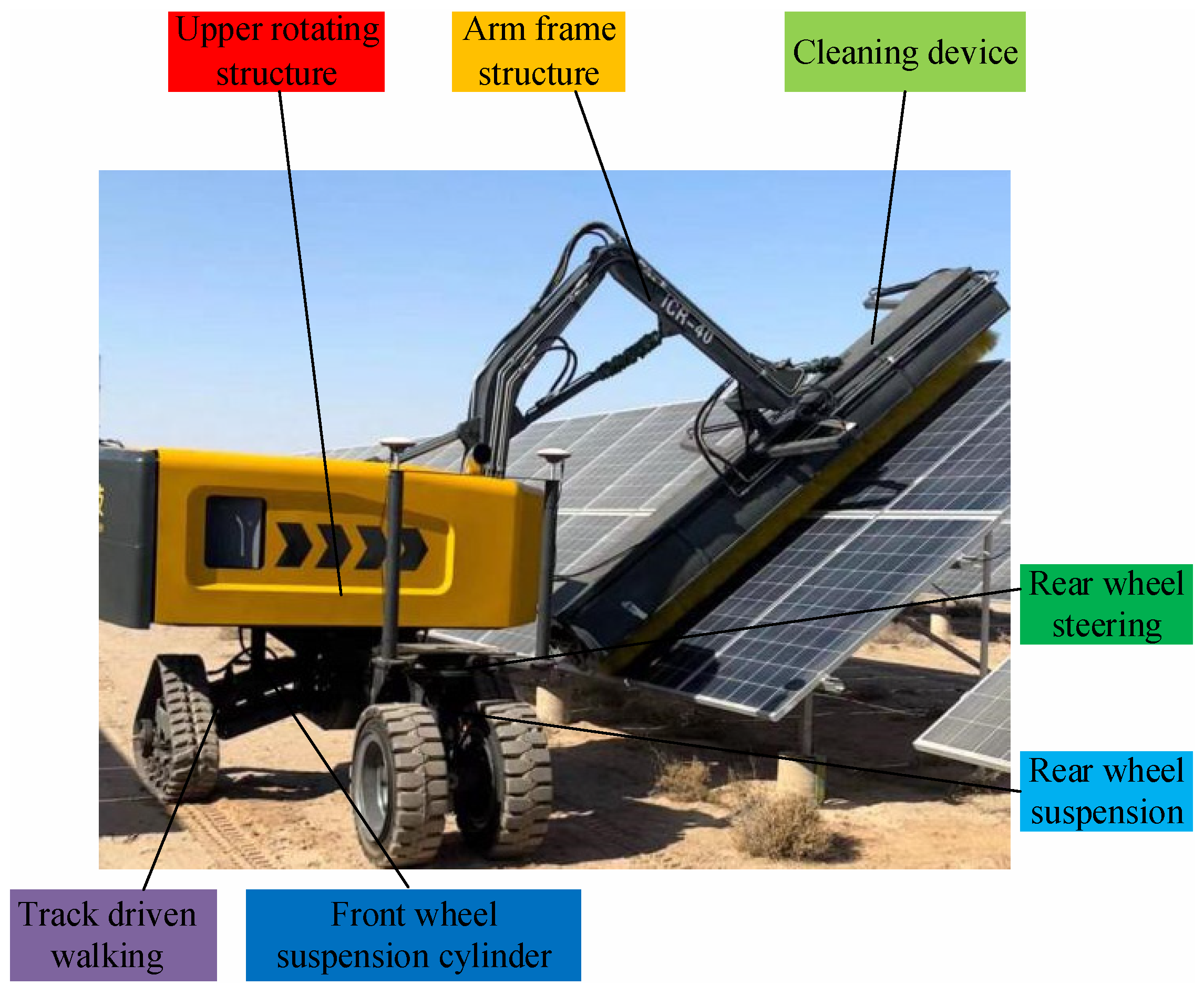
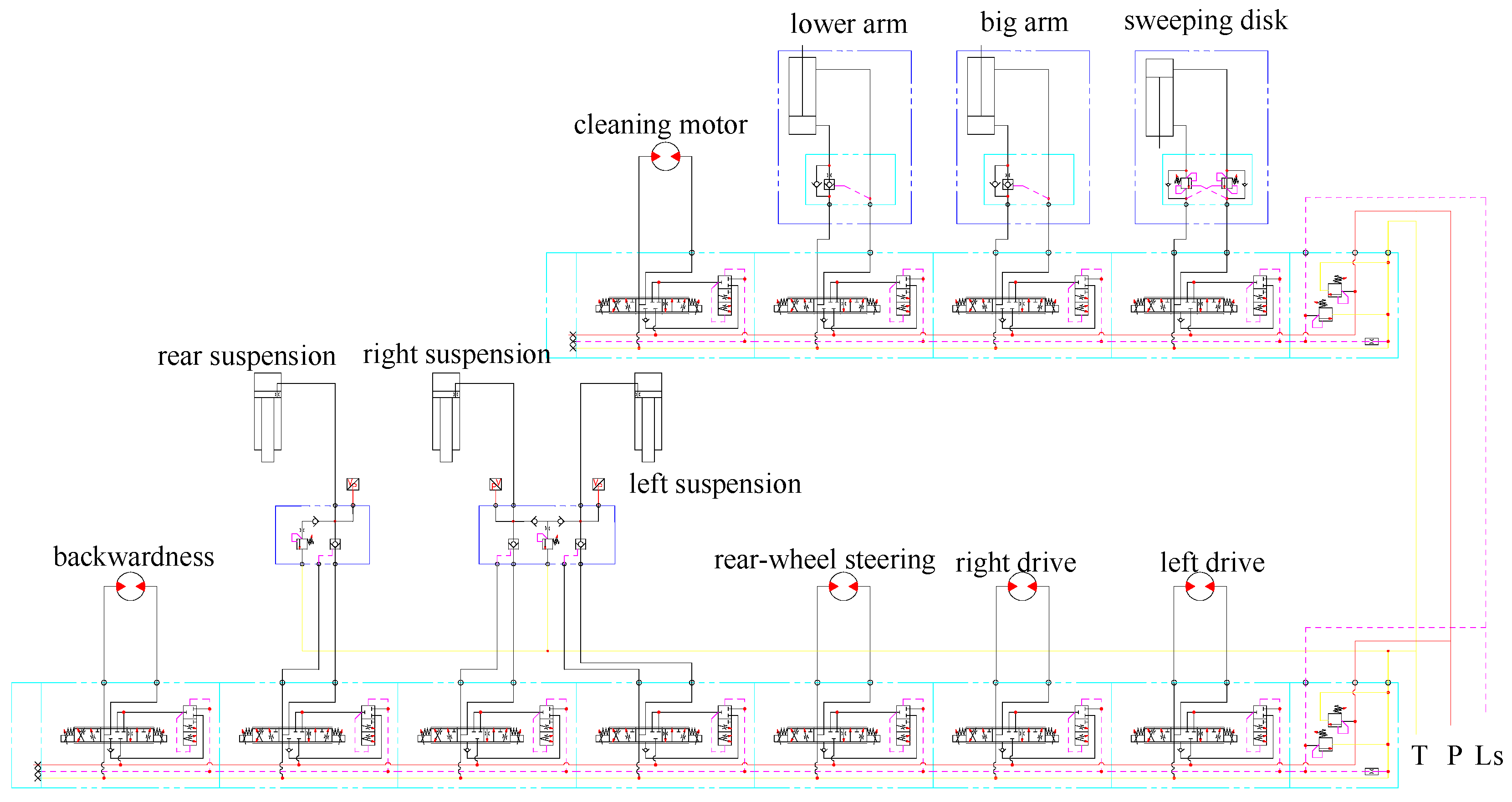
- A novel self-propelled hydraulic driven photovoltaic panel cleaning robot was proposed in accordance with the environmental factors for photovoltaic power plants and the arrangement of photovoltaic panels. Tracked wheel drive was adopted to increase the contact surface with the ground and improve road adaptability, capable of completing walking functions under harsh environmental conditions. The three-point independent suspension design enabled the robot to level automatically during walking so that the stability of the upper frame mechanism during walking could be ensured. Independent rear-wheel steering is capable of increasing the turning radius of the robot, thus making its steering more flexible. The design of a three-joint-series arm structure on the vehicle was equipped with an end-cleaning device, and multiple detection components (e.g., angle sensors and inclinometers) were installed to conform to the unmanned and intelligent cleaning requirements for the photovoltaic panel surface.
- (2)
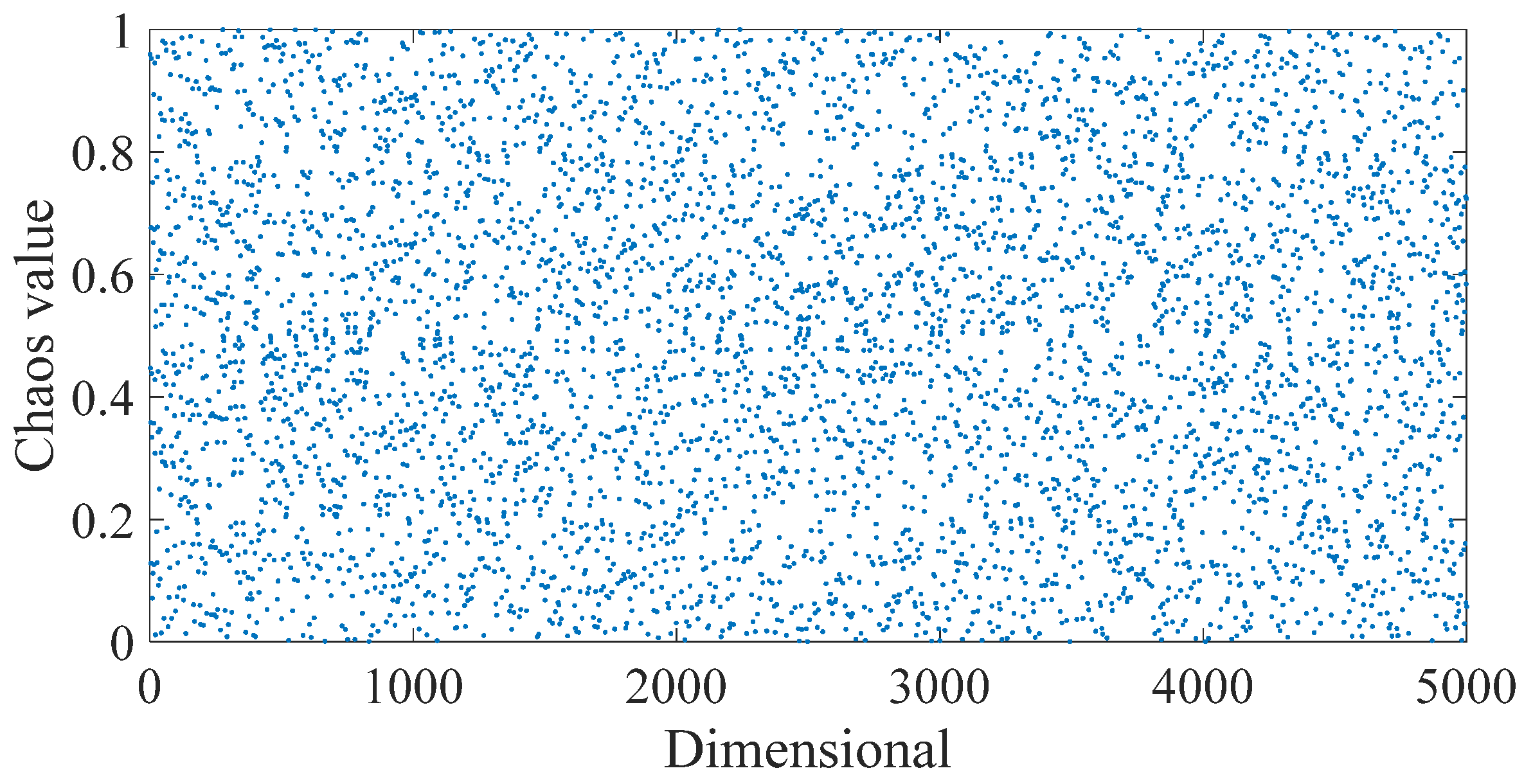
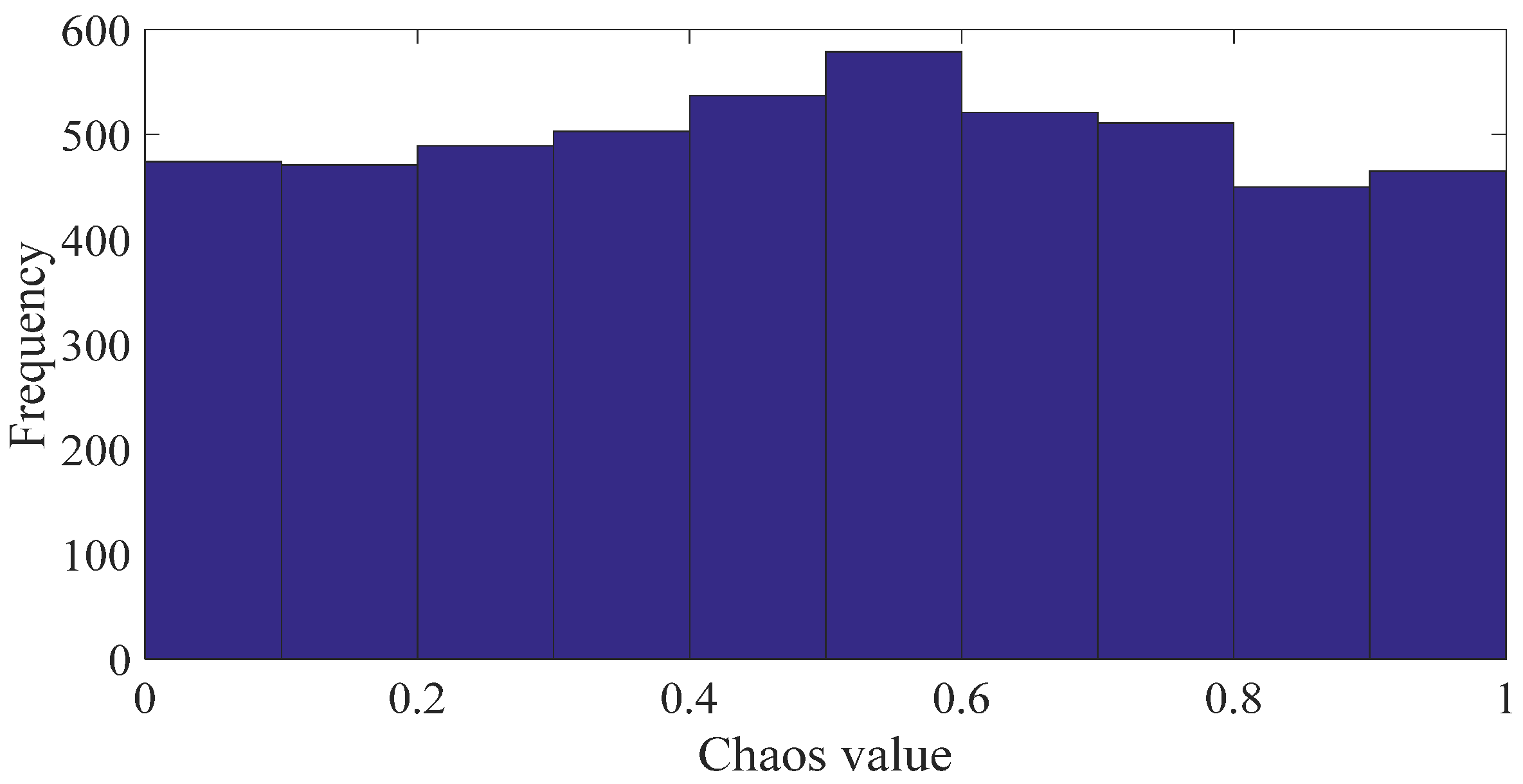
- The kinematics model of the boom cleaning device was built, and the optimized Circle chaotic map and nonlinear weight factor were introduced to increase the initial population diversity, search ability and convergence speed of the sparrow algorithm. The optimized sparrow algorithm and non-uniform B-spline curve were employed to optimize the time planning of the boom trajectory, and the speed of cleaning was increased. The reliability of the cleaning effect of the developed photovoltaic panel cleaning robot and the effectiveness of the optimal time were verified through the combination of simulation and experiment.
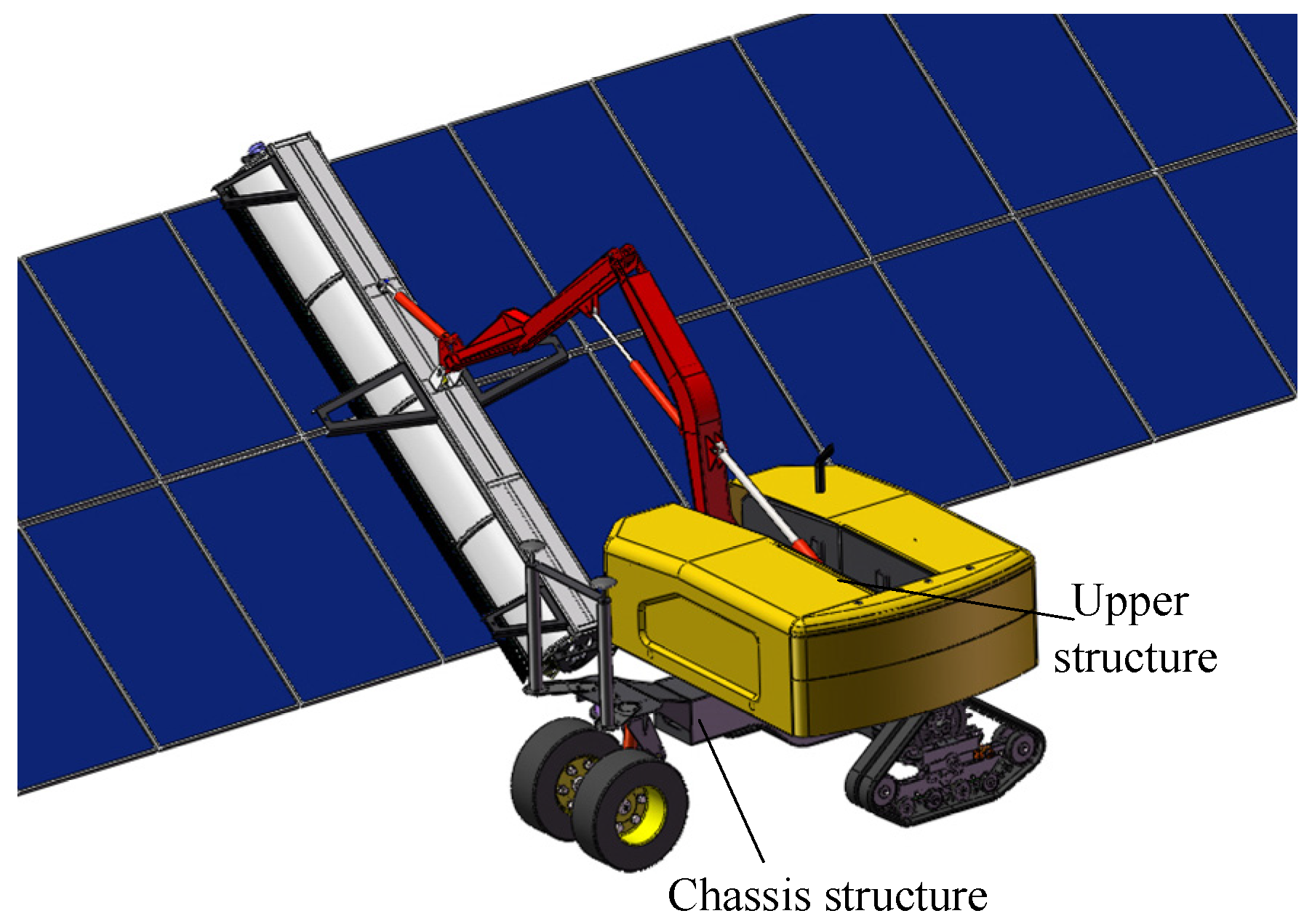
2. Structural Design of Photovoltaic Panel Cleaning Robot
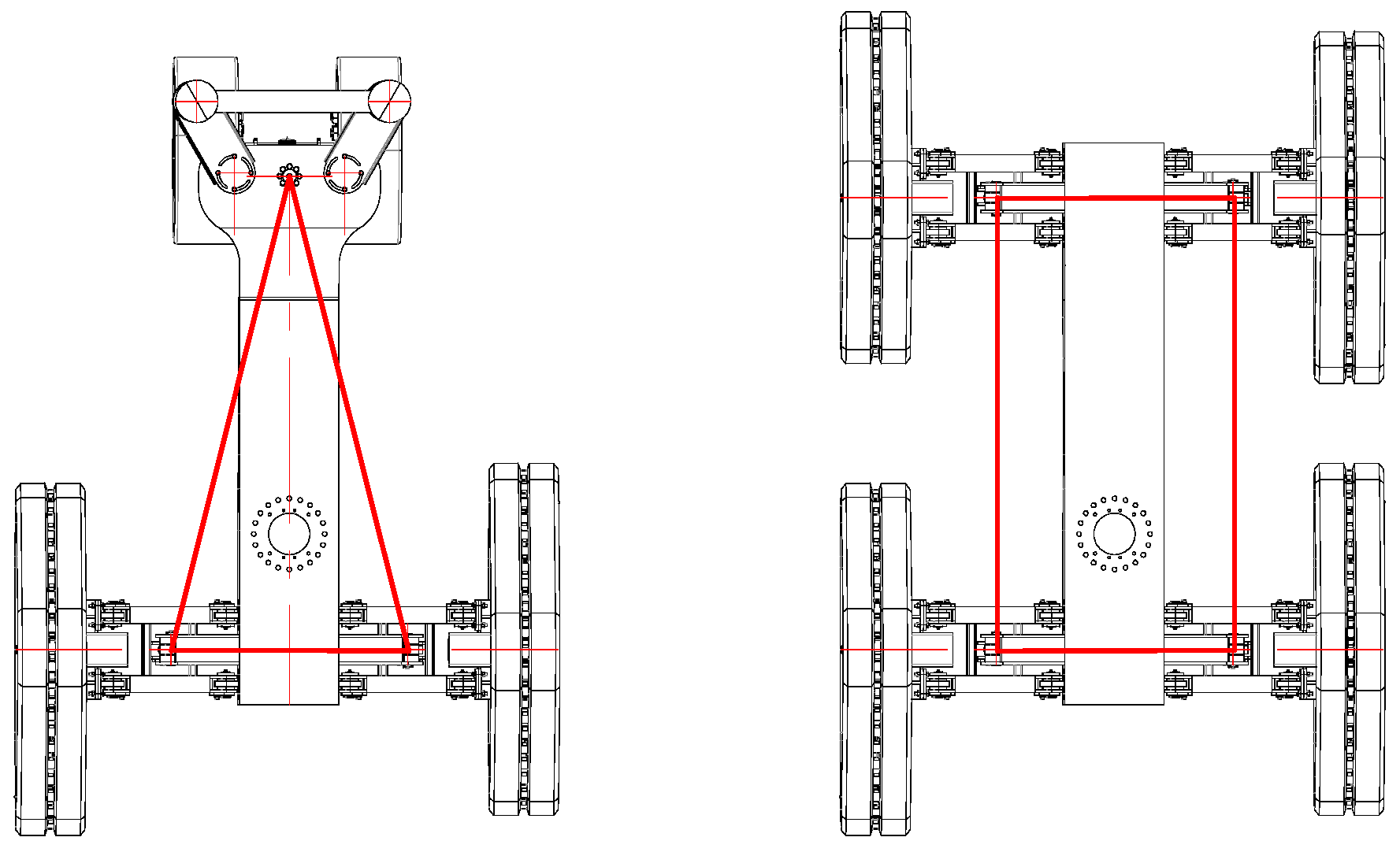
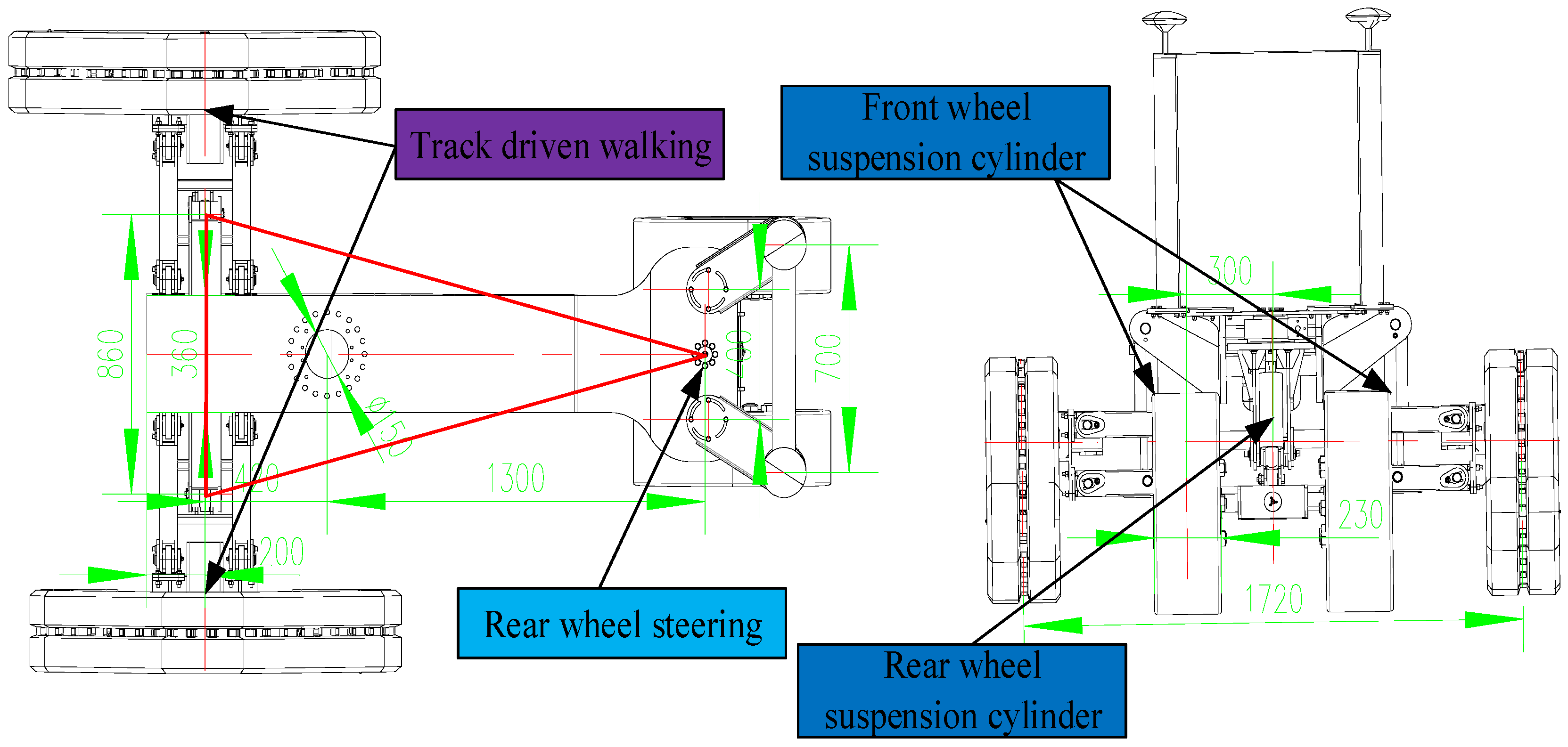
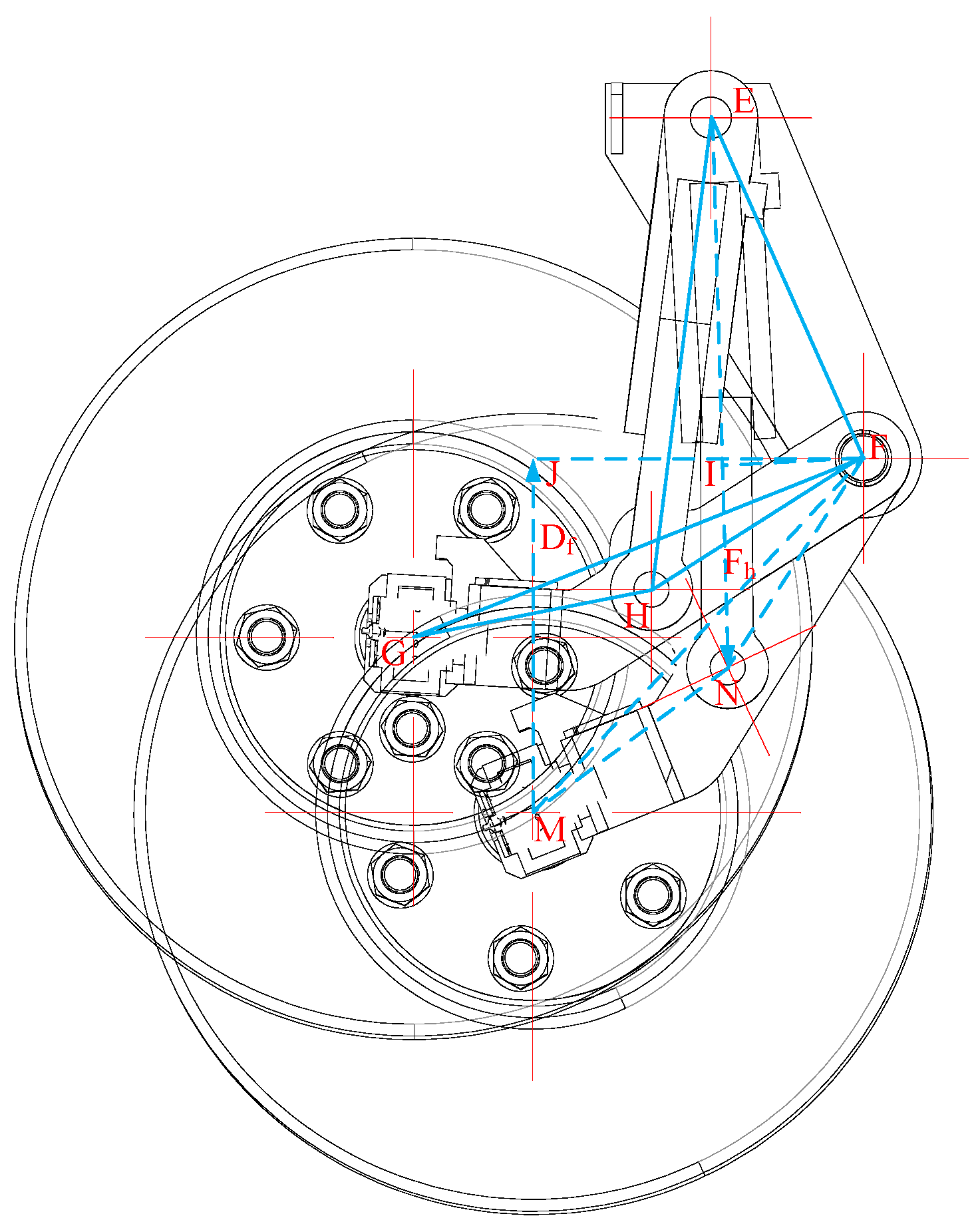
2.1. Chassis Structure
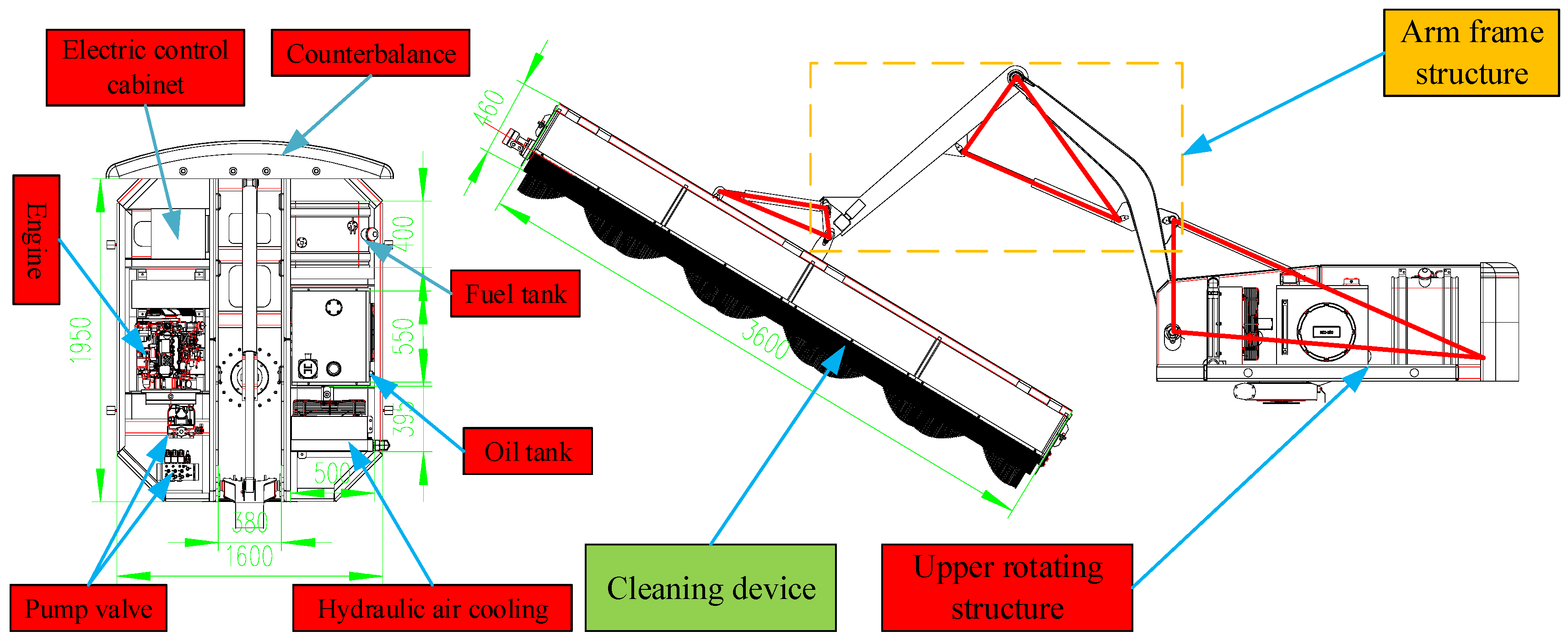
2.2. Upper Structure
- (1)
- Intelligent and efficient: the boom device was adjusted adaptively with the height of the photovoltaic panel, the cleaning device completely covered the photovoltaic panel surface, and the fit and coverage were good.
- (2)
- Strong obstacle crossing and smooth operation: front-wheel track drive and rear-wheel tire steering resulted in high driving force and small turning radius. The chassis had independent active suspension, adaptive leveling, and adaptive adjustment of longitudinal and transverse slopes which can adapt to complex road conditions.
- (3)
- Unmanned and versatile: robots using RTK + GPS navigation system can achieve high-precision positioning and navigation operations, saving labor costs. According to the needs of photovoltaic power plants, robots can achieve a variety of purposes.
- (4)
- Anhydrous cleaning: to overcome the problems of large water resource consumption and poor cleaning effect in conventional cleaning methods, water resource consumption can be avoided and the cleaning cost of power plants can be reduced.
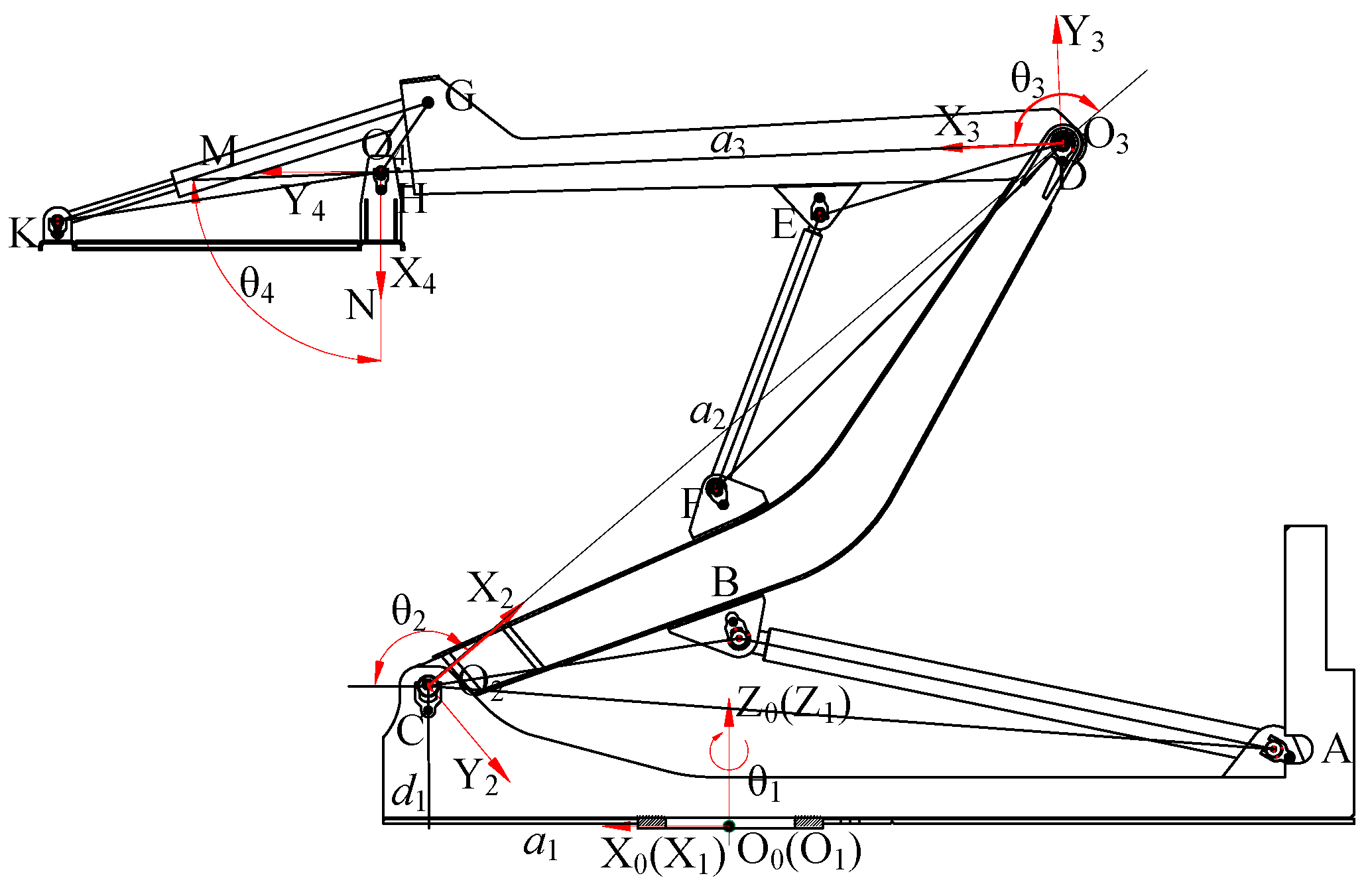
3. Robot Kinematics Model
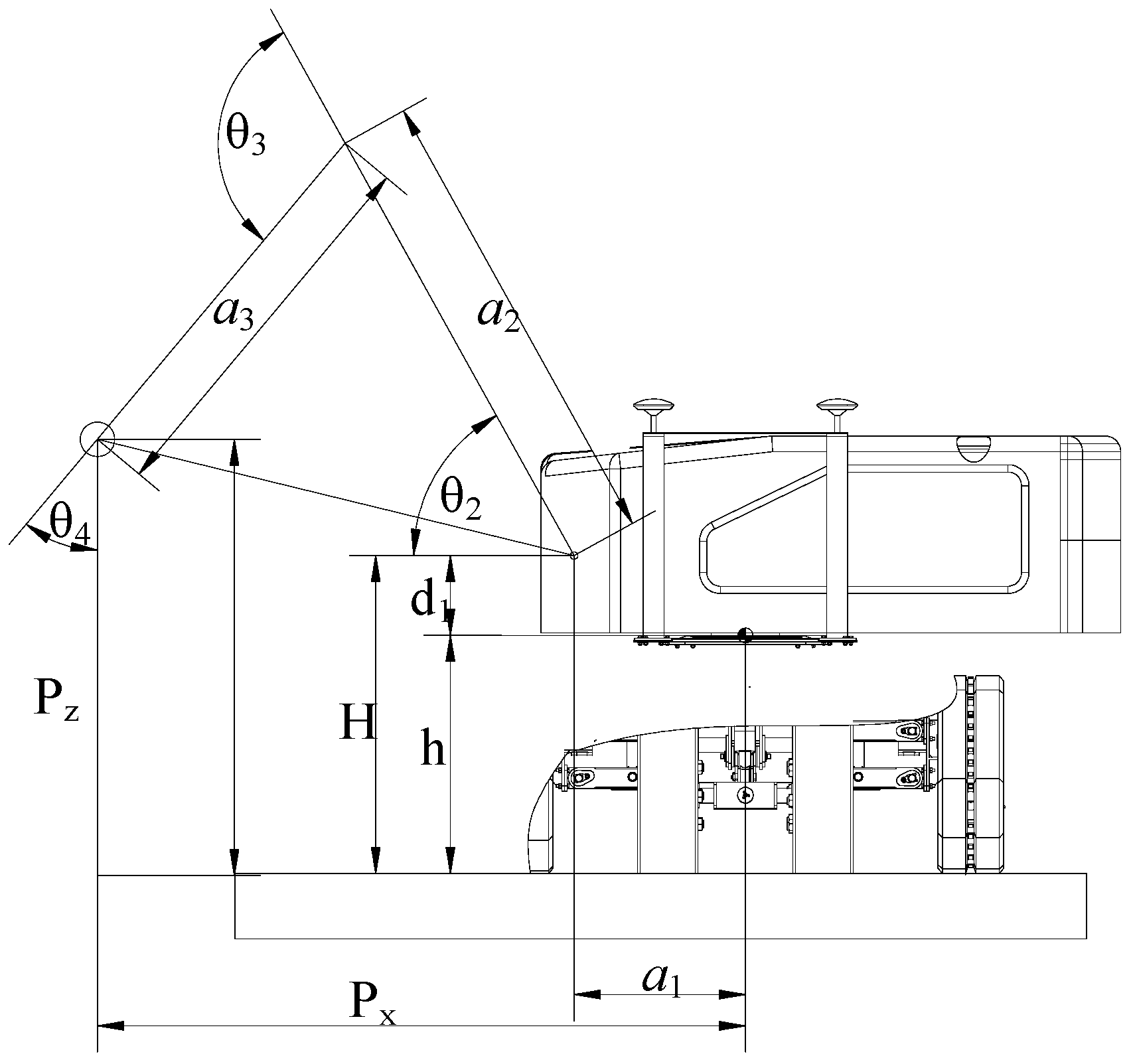
3.1. Kinematics Analysis
3.2. Jacobian Matrix Solution for Arm Frame
4. Cleaning Plan for Photovoltaic Robot Arm
4.1. Trajectory Discretization
4.2. B Spline Function
4.3. Trajectory Optimization of Improved Sparrow Algorithm
4.3.1. Time-Optimal Objective Function
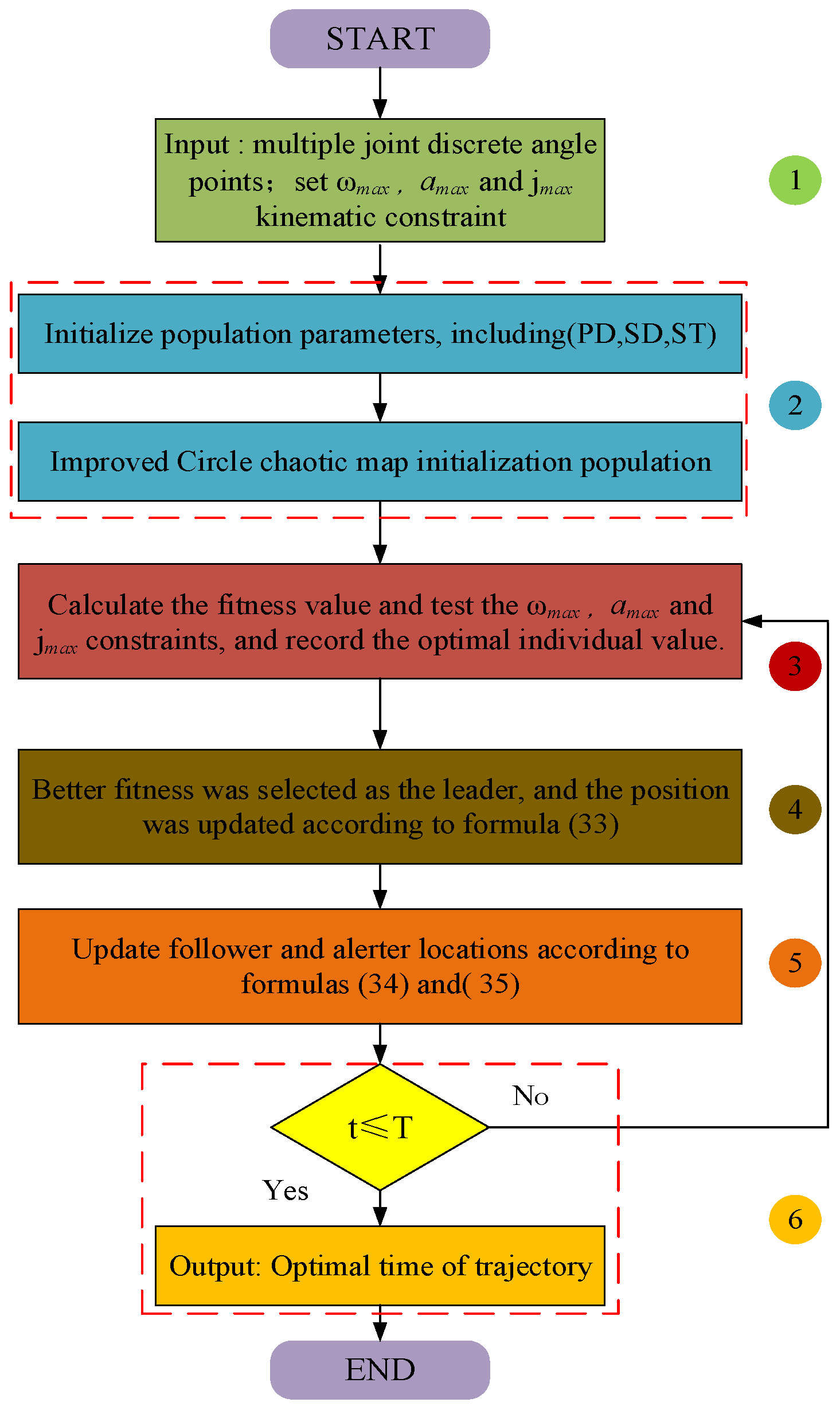
4.3.2. Improved Sparrow Algorithm
- (1)
- Improved Circle chaotic map initialization
- (2)
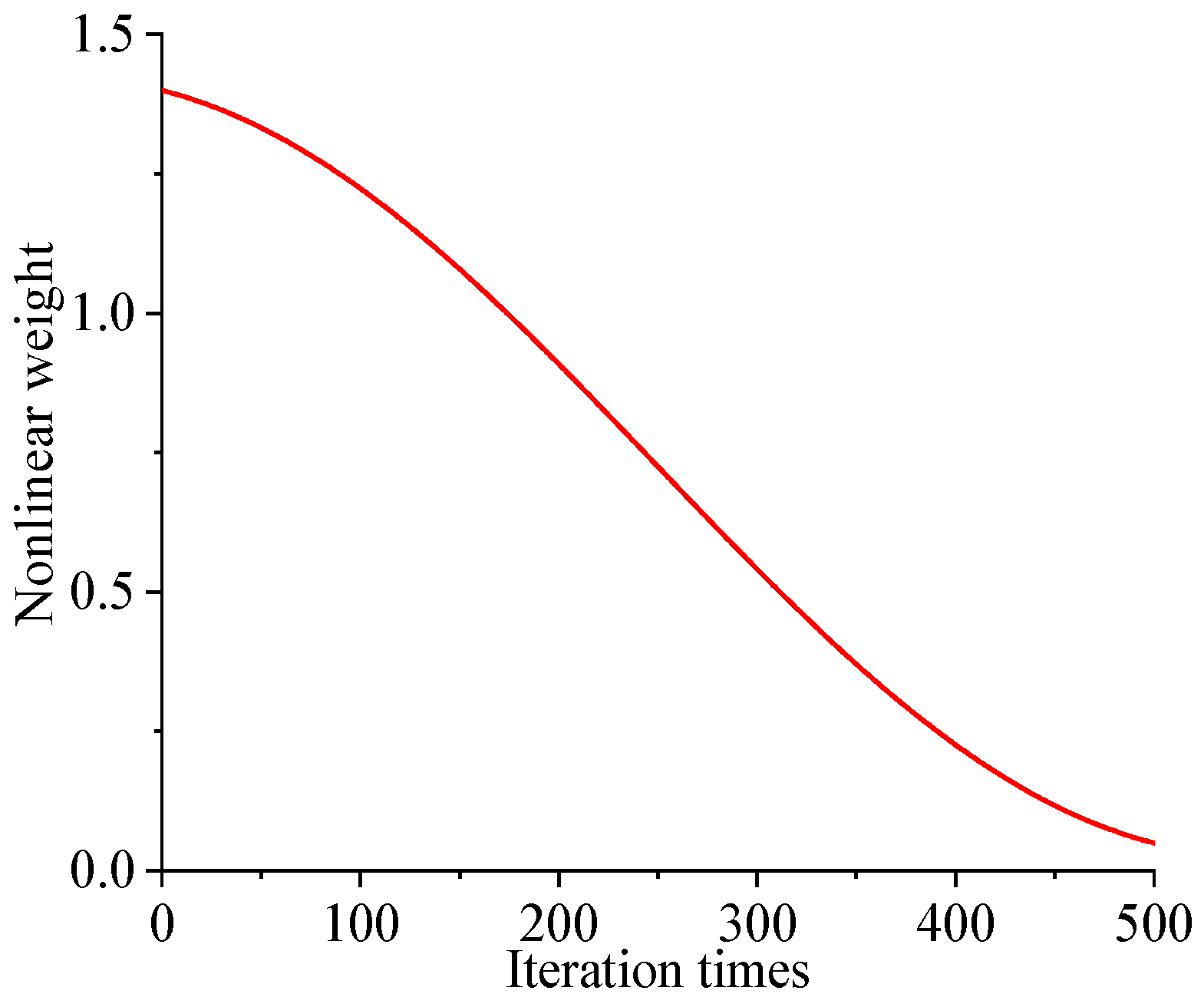
- Nonlinear weighting factor
- (3)
- Updates of leaders, followers and alerters [42]
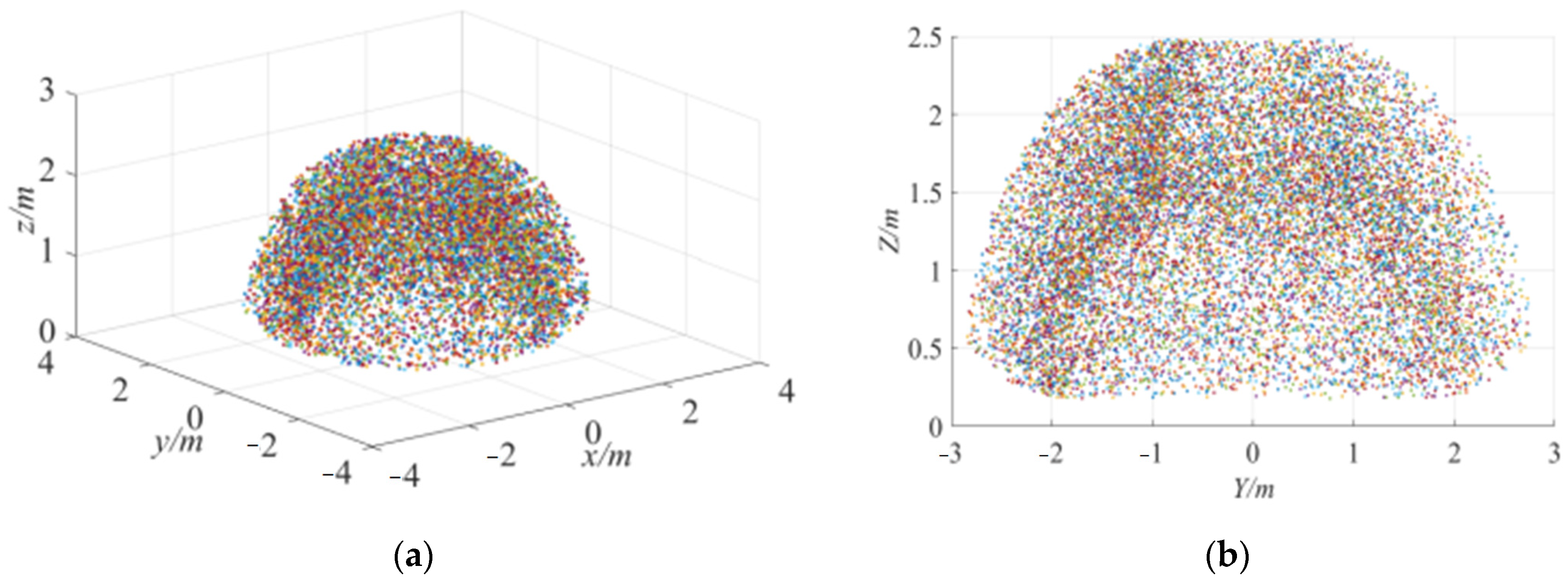
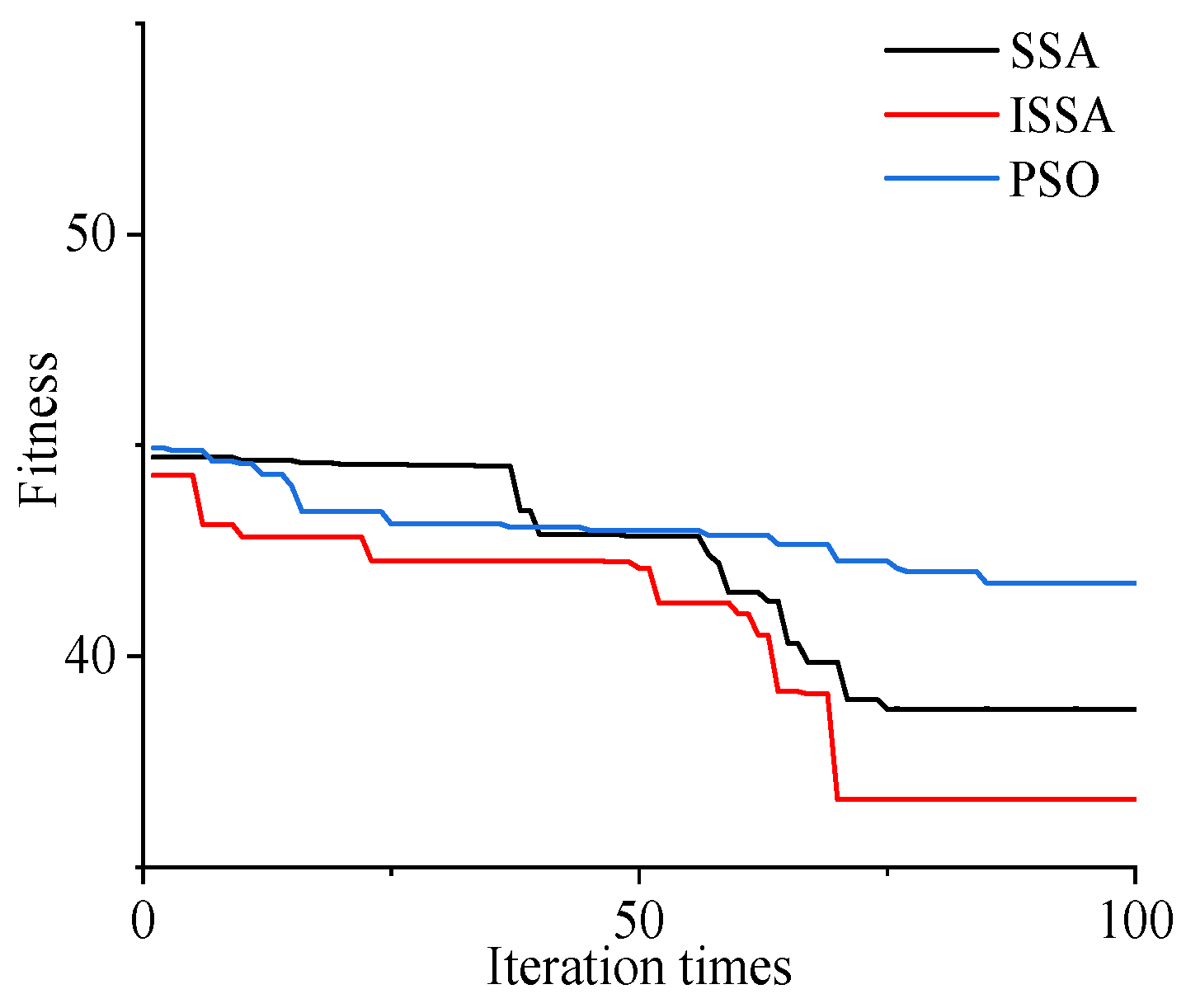
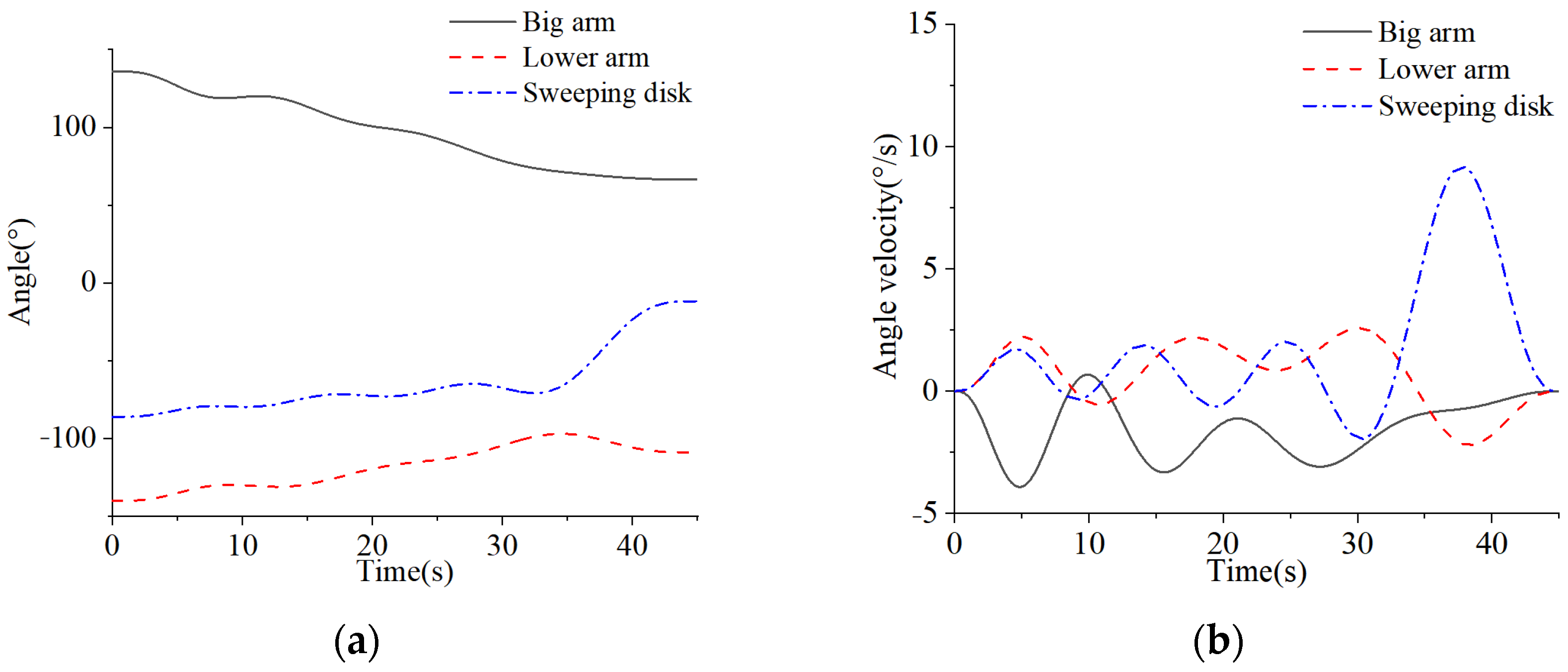
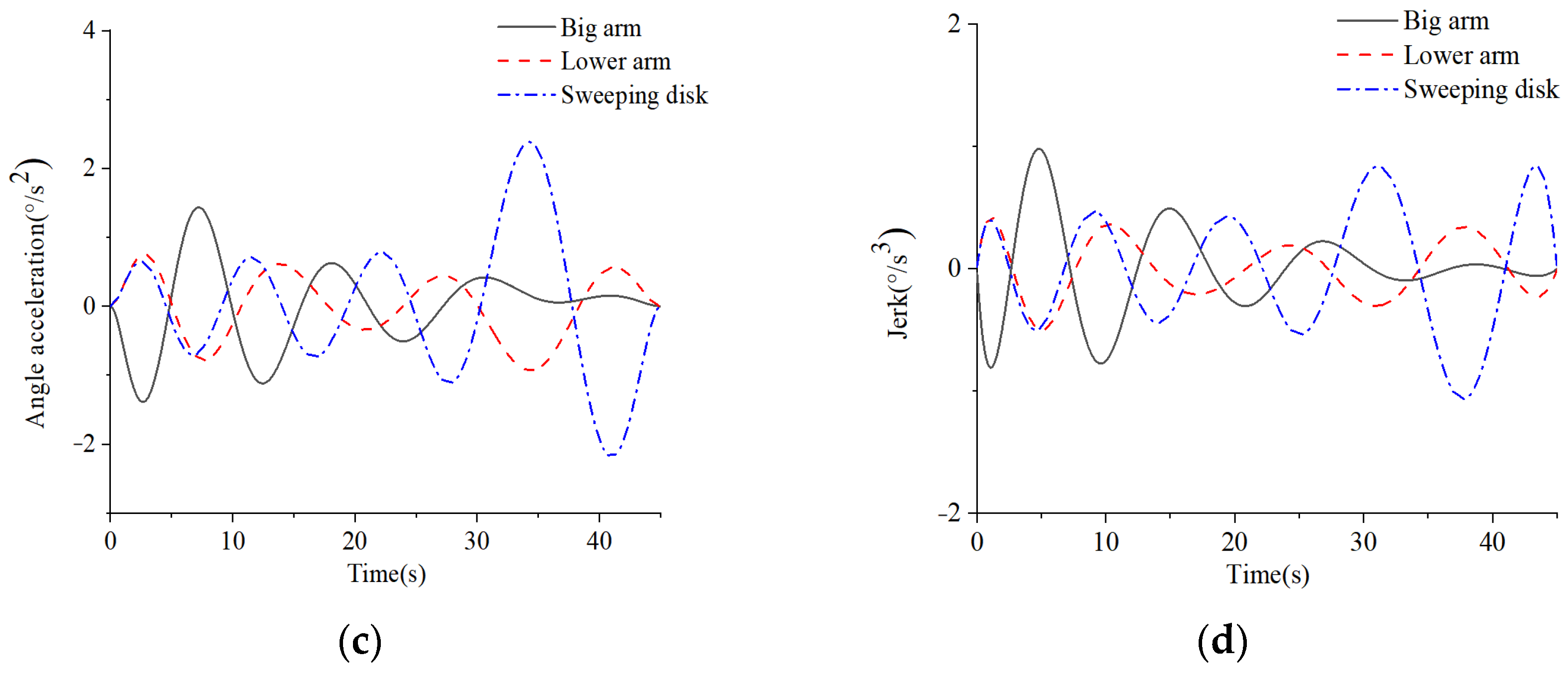
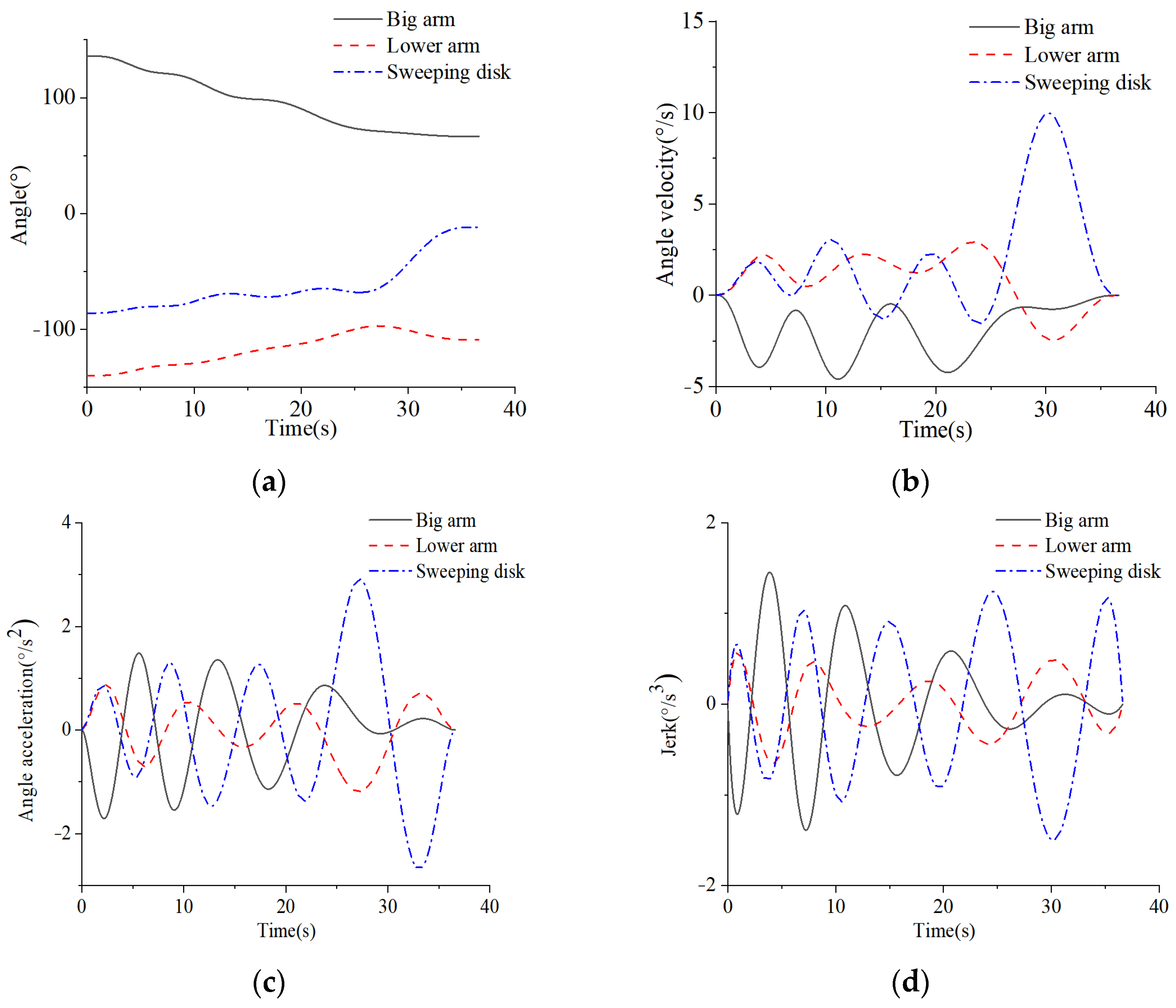
4.4. Simulation Analysis
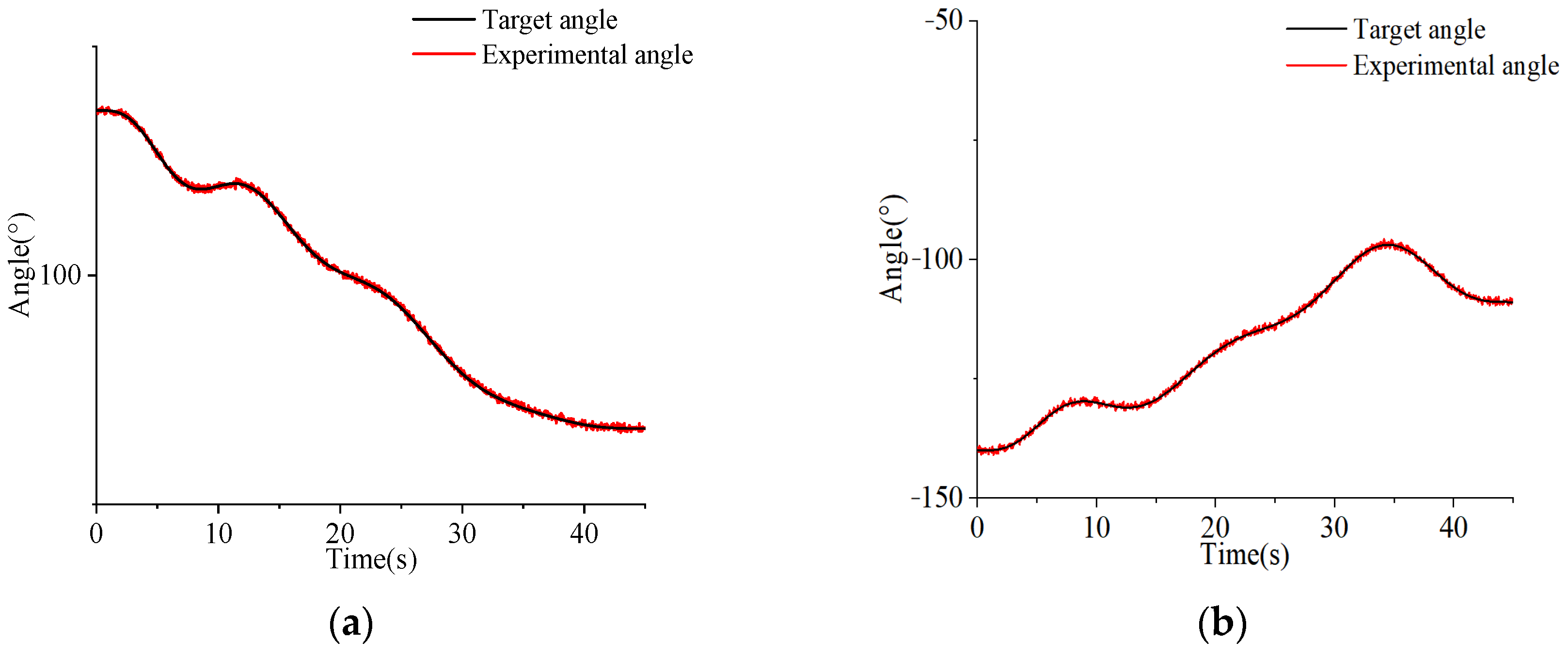
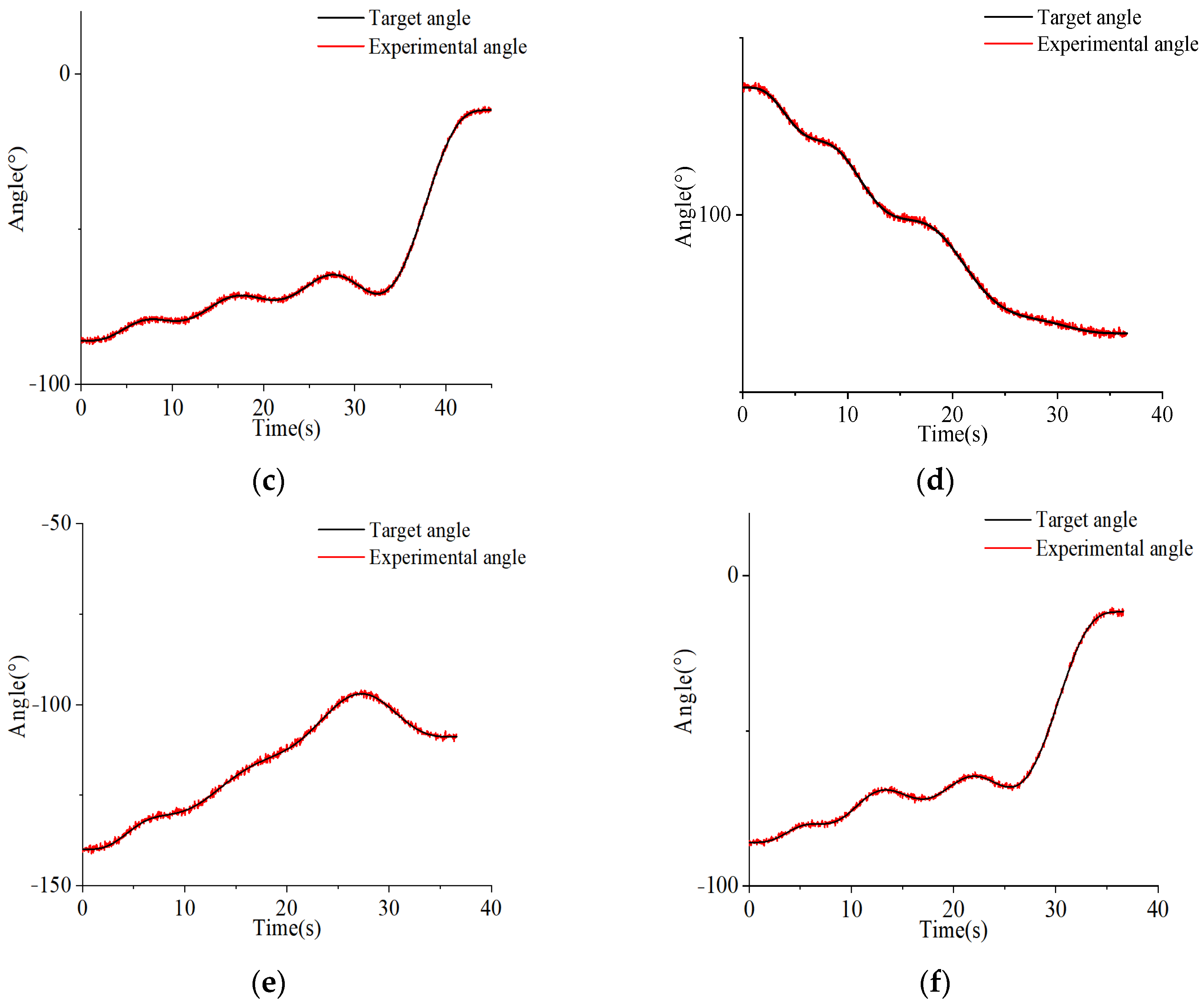
5. Experimental Research
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Abderrezek, M.; Fathi, M. Experimental study of the dust effect on photovoltaic panels’ energy yield. Sol. Energy 2017, 142, 308–320. [Google Scholar] [CrossRef]
- Kazem, H.; Chaichan, M. Experimental analysis of the effect of dust’s physical properties on photovoltaic modules in Northern Oman. Sol. Energy 2016, 139, 68–80. [Google Scholar] [CrossRef]
- Liu, F.; Zhang, Z.; Zhao, Y.; Zhu, Z.; Pan, W.; Wang, L.; Bin, X. A method of calculating the daily output power reduction of PV modules due to dust deposition on its surface. IEEE J. Photovolt. 2019, 9, 881–887. [Google Scholar] [CrossRef]
- Nepal, P.; Korevaar, M.; Ziar, H.; Isabella, O.; Zeman, M. Accurate soiling ratio determination with incident angle modifier for PV modules. IEEE J. Photovolt. 2018, 9, 295–301. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Xu, Z.; Zhang, Y.; Xie, M. Optimal cleaning scheduling for photovoltaic systems in the field based on electricity generation and dust deposition forecasting. IEEE J. Photovolt. 2020, 10, 1126–1132. [Google Scholar] [CrossRef]
- Klugmann-Radziemska, E.; Rudnicka, M. Decrease in photovoltaic module efficiency because of the deposition of pollutants. IEEE J. Photovolt. 2020, 10, 1772–1779. [Google Scholar] [CrossRef]
- Khadka, N.; Bista, A.; Adhikari, B.; Shrestha, A.; Bista, D.; Adhikary, B. Current practices of solar photovoltaic panel cleaning system and future prospects of machine learning implementation. IEEE Access 2020, 8, 135948–135962. [Google Scholar] [CrossRef]
- Sun, D.; Böhringer, K. An active self-cleaning surface system for photovoltaic modules using anisotropic ratchet conveyors and mechanical vibration. Microsyst. Nanoeng. 2020, 6, 87. [Google Scholar] [CrossRef]
- Mazumder, M.; Horenstein, M.; Stark, J.; Girouard, P.; Sumner, R.; Henderson, B.; Sadder, O.; Hidetaka, I.; Biris, A.; Sharma, R. Characterization of electrodynamic screen performance for dust removal from solar panels and solar hydrogen generators. IEEE Trans. Ind. Appl. 2013, 49, 1793–1800. [Google Scholar] [CrossRef]
- Lange, K.; Bahattab, M.; Alqahtani, S.; Mirza, M.; Glaubitt, W.; Naumann, V.; Hagendorf, C.; Ilse, K. Combined soiling and abrasion testing of antisoiling coatings. IEEE J. Photovolt. 2019, 10, 243–249. [Google Scholar] [CrossRef]
- Rifai, A.; Dheir, N.; Yilbas, B.; Khaled, M. Mechanics of dust removal from rotating disk in relation to self-cleaning applications of PV protective cover. Sol. Energy 2016, 130, 193–206. [Google Scholar] [CrossRef]
- Lu, H.; Cai, R.; Zhang, L.; Lu, L.; Zhang, L. Experimental investigation on deposition reduction of different types of dust on solar PV cells by self-cleaning coatings. Sol. Energy 2020, 206, 365–373. [Google Scholar] [CrossRef]
- Shehri, A.; Parrott, B.; Carrasco, P.; Saiari, H.; Taie, I. Impact of dust deposition and brush-based dry cleaning on glass transmittance for PV modules applications. Sol. Energy 2016, 135, 317–324. [Google Scholar] [CrossRef]
- Fan, S.; Liang, W.; Wang, G.; Zhang, Y.; Cao, S. A novel water-free cleaning robot for dust removal from distributed photovoltaic (PV) in water-scarce areas. Sol. Energy 2022, 241, 553–563. [Google Scholar] [CrossRef]
- Antonelli, M.; Zobel, P.; Marcellis, A.; Palange, E. Autonomous robot for cleaning photovoltaic panels in desert zones. Mechatronics 2020, 68, 102372. [Google Scholar] [CrossRef]
- Cai, S.; Bao, G.; Ma, X.; Wu, W.; Bian, G.; Rodrigues, J.; Albuquerque, V. Parameters optimization of the dust absorbing structure for photovoltaic panel cleaning robot based on orthogonal experiment method. J. Clean. Prod. 2019, 217, 724–731. [Google Scholar] [CrossRef]
- Khan, M.; Abbas, M.; Khan, M.; Kousar, A.; Alam, M.; Massoud, Y.; Jafri, S. Modeling and design of low-cost automatic self cleaning mechanism for standalone micro PV systems. Sustain. Energy Technol. Assess. 2021, 43, 100922. [Google Scholar] [CrossRef]
- Ölmez, B.; Ergezer, Ö.; Güğül, G. Autonomous solar panel cleaning robot with rubber wheeled and air-absorbing motor. Int. J. Energy Appl. Technol. 2021, 8, 182–187. [Google Scholar] [CrossRef]
- Hou, Y.; Fu, Y.; Chen, J. Analysis on dynamic feature of cross arm light weighting for photovoltaic panel cleaning device in power station based on power correlation. Open Phys. 2020, 18, 492–503. [Google Scholar] [CrossRef]
- Nguyen, M.; Truong, C.; Nguyen, V.; Duong, V.; Nguyen, H.; Nguyen, T. Research on Adhesive Coefficient of Rubber Wheel Crawler on Wet Tilted Photovoltaic Panel. Appl. Sci. 2022, 12, 6605. [Google Scholar] [CrossRef]
- Jang, W.; Kim, J.; Lee, S.; Kim, D. Mechanism design for walking typed solar panel-cleaning robot using triple driving lines. IAES Int. J. Robot. Autom. 2023, 12, 1. [Google Scholar] [CrossRef]
- Parrott, B.; Zanini, P.; Shehri, A.; Kotsovos, K.; Gereige, I. Automated, robotic dry-cleaning of solar panels in Thuwal, Saudi Arabia using a silicone rubber brush. Sol. Energy 2018, 171, 526–533. [Google Scholar] [CrossRef]
- Divyavani, G.; Chinnaaiah, M.; Dubey, S.; Asharani, P.; Kalyani, P. An Unveiling System to Clean Solar Panels with FPGA Based Robots. Inter. J. Pure Appl. Math. 2018, 118, 1–14. [Google Scholar]
- Amin, A.; Wang, X.; Alroichdi, A.; Ibrahim, A. Designing and Manufacturing a Robot for Dry-Cleaning PV Solar Panels. Int. J. Energy Res. 2023, 2023, 1–15. [Google Scholar] [CrossRef]
- Al-Jarrah, A.; Al-Jarrah, R.; Al-Momani, F.; Ababneh, M.; AI-Hajji, M. Two-Dimensional Movement Photovoltaic Cleaning Robot with Speed Control. Int. J. Mech. Eng. Robot. Res. 2022, 11, 151–158. [Google Scholar] [CrossRef]
- Morando, L.; Recchiuto, C.; Calla, J.; Scuteri, P.; Sgorbissa, A. Thermal and Visual Tracking of Photovoltaic Plants for Autonomous UAV Inspection. Drones 2022, 6, 347. [Google Scholar] [CrossRef]
- Rehman, S.; Mohandes, M.; Hussein, A.; Alhems, L.; AI-Shaikhi, A. Cleaning of Photovoltaic Panels Utilizing the Downward Thrust of a Drone. Energies 2022, 15, 8159. [Google Scholar] [CrossRef]
- Gupta, V.; Sharma, M.; Pachauri, R.; Babu, K. Design and development of self-cleaning PV sliding system. Clean Energy 2022, 6, 392–403. [Google Scholar] [CrossRef]
- Wang, J.; Zhao, J.; Li, W.; Jia, X.; Wei, P. Research and improvement of the hydraulic suspension system for a heavy hydraulic transport vehicle. Appl. Sci. 2020, 10, 5220. [Google Scholar] [CrossRef]
- Li, S.; Zhang, X. Research on planning and optimization of trajectory for underwater vision welding robot. Array 2022, 16, 100253. [Google Scholar] [CrossRef]
- Cheng, Q.; Hao, X.; Wang, Y.; Xu, W.; Li, S. Trajectory planning of transcranial magnetic stimulation manipulator based on time-safety collision optimization. Robot. Auton. Syst. 2022, 152, 104039. [Google Scholar] [CrossRef]
- Nie, M.; Zou, L.; Zhu, T. Jerk-Continuous Feedrate Optimization Method for NURBS Interpolation. IEEE Access 2023, 11, 25664–25681. [Google Scholar] [CrossRef]
- Wang, G.; Chen, J.; Zhou, K.; Pang, Z. Industrial Robot Contouring Control Based on Non-Uniform Rational B-Spline Curve. Symmetry 2022, 14, 2533. [Google Scholar] [CrossRef]
- Yan, S.; Liu, W.; Li, X.; Yang, P.; Wu, F.; Yan, Z. Comparative Study and Improvement Analysis of Sparrow Search Algorithm. Wirel. Commun. Mob. Comput. 2022, 2022, 4882521. [Google Scholar] [CrossRef]
- Gao, B.; Shen, W.; Guan, H.; Zheng, L.; Zhang, W. Research on multistrategy improved evolutionary sparrow search algorithm and its application. IEEE Access 2022, 10, 62520–62534. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, L.; Qian, L.; Cheng, B.; Hou, W.; Zhuang, Y. Sine-SSA-BP Ship Trajectory Prediction Based on Chaotic Mapping Improved Sparrow Search Algorithm. Sensors 2023, 23, 704. [Google Scholar] [CrossRef] [PubMed]
- Gharehchopogh, F.; Namazi, M.; Ebrahimi, L.; Abdollahzadeh, B. Advances in sparrow search algorithm: A comprehensive survey. Arch. Comput. Methods Eng. 2023, 30, 427–455. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, T.; Ngo, T.; Dao, T.; Nguyen, T. Microgrid operations planning based on improving the flying sparrow search algorithm. Symmetry 2022, 14, 168. [Google Scholar] [CrossRef]
- Kathiroli, P.; Selvadurai, K. Energy efficient cluster head selection using improved Sparrow Search Algorithm in Wireless Sensor Networks. J. King Saud Univ. Comput. Inf. Sci. 2022, 34, 8564–8575. [Google Scholar] [CrossRef]
- Zhang, D.; Xu, H.; Wang, Y.; Song, T.; Wang, Y. Whale optimization algorithm for embedded Circle mapping and onedimensional oppositional learning based small hole imaging. Control Decis. 2021, 36, 1173–1180. [Google Scholar]
- Song, L.; Chen, W.; Chen, W.; Lin, Y.; Sun, T. Improvement and application of hybrid strategy-based sparrow search algorithm. J. Beijing Univ. Aeronaut. Astronaut 2022, 1–16. [Google Scholar] [CrossRef]
- Liu, L.; Liang, J.; Guo, K.; Ke, C.; He, D.; Chen, J. Dynamic Path Planning of Mobile Robot Based on Improved Sparrow Search Algorithm. Biomimetics 2023, 8, 182. [Google Scholar] [CrossRef] [PubMed]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Name | Numerical Value | Number | Name | Numerical Value |
|---|---|---|---|---|---|
| 1 | drive power | 8 kW | 7 | turning radius | ≥2 m |
| 2 | system pressure | 20 Mpa | 8 | upper rotation | ±180° |
| 3 | machine weight | 1600 kg | 9 | chassis leveling | three-level |
| 4 | end load | 200 kg | 10 | gradeability | 10% |
| 5 | cleaning radius | ≥2.3 m | 11 | sweeping speed | 1 km/h |
| 6 | traveling speed | 2.5 km/h | 12 | cleaning method | dry cleaning |
| Number | Name | Three Wheel | Four Wheel |
|---|---|---|---|
| 1 | Weight (kg) | 1060 | 1530 |
| 2 | turning radius size | small | big |
| 3 | difficulty of leveling strategy | simple control | complex control |
| 4 | hyperstatic | no | yes |
| 5 | turning method | rear-wheel steering | differential steering |
| 6 | driving power | small | big |
| Joint i | αi−1 (°) | ai−1 (mm) | di (mm) | Variable θi (°) | Variable Range (°) |
|---|---|---|---|---|---|
| 1 | 0 | d1 | 0 | θ1 | [−180, 180] |
| 2 | 90 | 0 | a1 | θ2 | [49, 136] |
| 3 | 0 | 0 | a2 | θ3 | [−140, −97] |
| 4 | 0 | d4 | a3 | θ4 | [−108, −2] |
| Discrete Point | Rotation (°) | Big Arm (°) | Lower Arm (°) | Sweep (°) | ξ |
|---|---|---|---|---|---|
| (0.444, 0.831, 1.442) | 90 | 136 | −140 | −86 | −90 |
| (0.444, 1.127, 1.553) | 90 | 123 | −132.8 | −80.2 | −90 |
| (0.444, 1.204, 1.585) | 90 | 120 | −130.5 | −79.5 | −90 |
| (0.444, 1.443, 1.538) | 90 | 110 | −127.7 | −72.3 | −90 |
| (0.444, 1.834, 1.616) | 90 | 97 | −115.4 | −71.6 | −90 |
| (0.444, 2.177, 1.457) | 90 | 84 | −109.2 | −64.8 | −90 |
| (0.444, 2.566, 1.350) | 90 | 71 | −97 | −64 | −90 |
| (0.444, 2.460, 0.953) | 90 | 66.58 | −108.9 | −11.68 | −54 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Zhao, X.; Gao, Y.; Guo, R.; Zhao, J. Research on Mechanism Design and Kinematic Characteristics of Self-Propelled Photovoltaic Cleaning Robot. Appl. Sci. 2023, 13, 6967. https://doi.org/10.3390/app13126967
Yang J, Zhao X, Gao Y, Guo R, Zhao J. Research on Mechanism Design and Kinematic Characteristics of Self-Propelled Photovoltaic Cleaning Robot. Applied Sciences. 2023; 13(12):6967. https://doi.org/10.3390/app13126967
Chicago/Turabian StyleYang, Jing, Xiaolong Zhao, Yingjie Gao, Rui Guo, and Jingyi Zhao. 2023. "Research on Mechanism Design and Kinematic Characteristics of Self-Propelled Photovoltaic Cleaning Robot" Applied Sciences 13, no. 12: 6967. https://doi.org/10.3390/app13126967