

Hyperspectral Anomaly Detection Based on Multi-Feature Joint Trilateral Filtering and Cooperative Representation

Abstract
:1. Introduction
2. Materials and Methods
2.1. Data
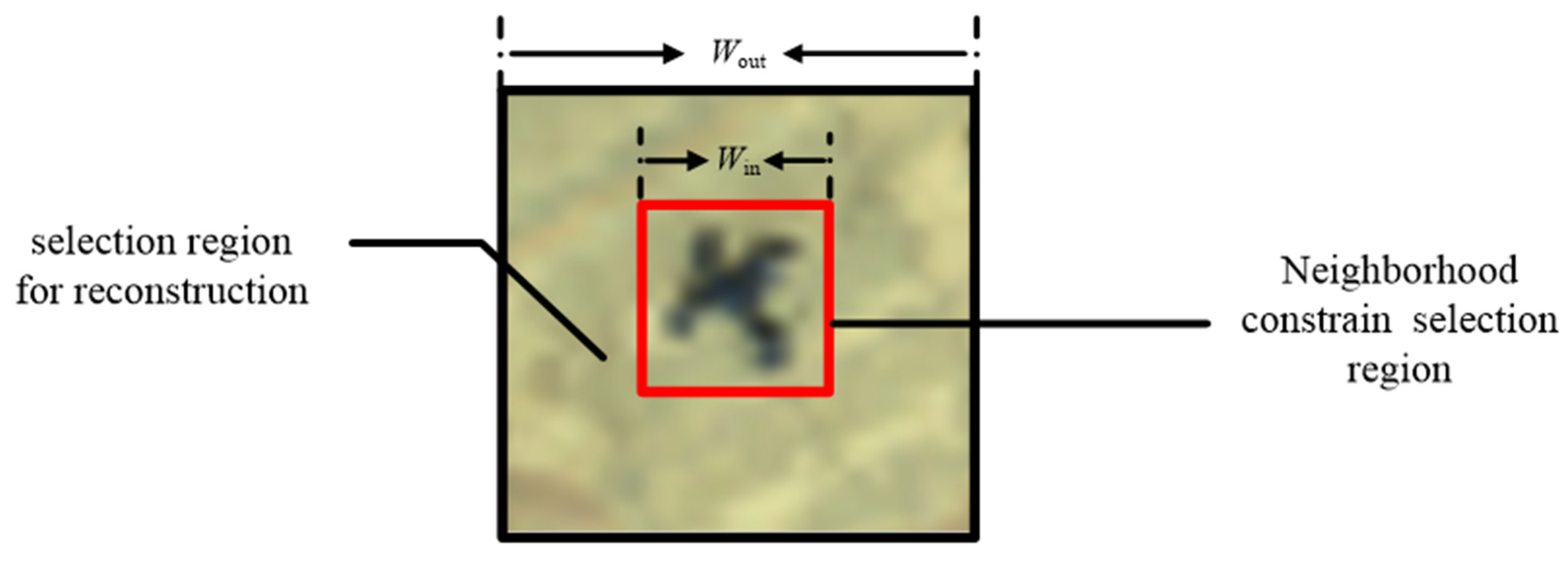
2.2. Anomaly Detection Algorithm Based on Cooperative Representation
2.3. Proposed Method
2.3.1. Improved Trilateral Filtering Algorithm Based on Multi-Feature Combination
2.3.2. Background Purification
3. Results and Discussion
3.1. Beach Analysis of the Plane Image Experiment Results
- (1)
- Parameter setting
- (2)
- Results and discussion
3.2. Experiment Results of the Saliens_Synthetic Image
- (1)
- Parameter setting
- (2)
- Results and discussion
3.3. Road_Analysis of Vehicle Image Experiment Results
- (1)
- Parameter setting
- (2)
- Results and discussion
3.4. Overall Evaluation of the Experimental Results
3.5. Experiment on Another Dataset
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Yuan, Y.; Wang, Q.; Zhu, G. Fast hyperspectral anomaly detection via high-order 2-D crossing filter. IEEE Trans. Geosci. Remote Sens. 2015, 53, 620–630. [Google Scholar] [CrossRef]
- Wang, X.Y.; Wang, L.G.; Wang, J.W.; Sun, K.P.; Wang, Q.M. Hyperspectral Anomaly Detection via Background Purification and Spatial Difference Enhancement. IEEE Trans. Geosci. Remote Sens. 2022, 19, 6006005. [Google Scholar] [CrossRef]
- Reed, I.S.; Yu, X. Adaptive multiple-band CFAR detection of an optical pattern with unknown spectral distribution. IEEE Int. Conf. Acoust. Speech Signal Process. 1990, 38, 1760–1770. [Google Scholar] [CrossRef]
- Matteoli, S.; Diani, M.; Corsini, G. Hyperspectral anomaly detection with kurtosis-driven local convarience matrix corruption mitigation. IEEE Geosci. Remote Sens. Lett. 2011, 8, 532–536. [Google Scholar] [CrossRef]
- Gao, L.; Guo, Q.; Plaza, A.; Li, J.; Zhang, B. Probabilistic anomaly detector for remotely sensed hyperspectral data. J. Appl. Remote Sens. 2014, 8, 083538. [Google Scholar] [CrossRef]
- Melero, J.M.; Paz, A.; Garzon, E.M.; Martinez, J.A.; Plaza, A.; Garcia, I. Fast anomaly detection in hyperspectral images with RX method on heterogeneous clusters. J. Supercom. 2011, 58, 411–419. [Google Scholar] [CrossRef]
- Liu, W.; Chang, C. Multiple-window anomaly detection for hyperspectral imagery. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2013, 6, 644–658. [Google Scholar] [CrossRef]
- Zhang, Y.; Hua, W.S.; Huang, F.Y.; Wang, Q.H.; Suo, W.K. Space-Spectrum Joint Anomaly Degree for Hyperspectral Anomaly Target Detection. Sectrosc. Spect. Anal. 2020, 40, 1902–1908. [Google Scholar]
- Li, W.; Du, Q. Collaborative representation for hyperspectral anomaly detection. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1463–1474. [Google Scholar] [CrossRef]
- Xiang, P.; Zhou, H.X.; Li, H.; Song, S.Z.; Tan, W.; Song, J.L.Q.; Gu, L. Hyperspectral anomaly detection by local joint subspace process and support vector machine. Int. J. Remote Sens. 2020, 41, 3798–3819. [Google Scholar] [CrossRef]
- Xie, W.Y.; Li, Y.S.; Lei, J.; Yang, J.; Chang, C.I.; Li, Z. Hyperspectral band selection for spectral-spatial anomaly detection. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3426–3436. [Google Scholar] [CrossRef]
- Qu, Y.; Wang, W.; Guo, R.; Ayhan, B.; Kwan, C.; Vance, S.; Qi, H.R. Hyperspectral anomaly detection through spectral unmixing and dictionary-based low-rank decomposition. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4391–4405. [Google Scholar] [CrossRef]
- Kang, X.; Li, S.; Benediktsson, J.A. Spectral-spatial hyperspectral image classification with edge-preserving filtering. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2666–2667. [Google Scholar] [CrossRef]
- Zhang, Y.; Fan, Y.; Xu, M.; Xu, M.M.; Li, W.; Zhang, G.Y.; Liu, L.; Yu, D.F. An improved low rank and sparse matrix decomposition-based anomaly target detection algorithm for hyperspectral imagery. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2020, 13, 2663–2672. [Google Scholar] [CrossRef]
- Ma, Y.; Fan, G.; Jin, Q.W.; Huang, J.; Mei, X.G.; Ma, J.Y. Hyperspectral anomaly detection via integration of feature extraction and background purification. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1436–1440. [Google Scholar] [CrossRef]
- Zhuang, L.; Gao, L.; Zhang, B.; Fu, X.Y.; Bioucas-Dias, J.M. Hyperspectral image denoising and anomaly detection based on low-rank and sparse representations. IEEE Trans. Geosci. Remote Sens. 2020, 60, 1–17. [Google Scholar]
- Verdoja, F.; Grangetto, M. Graph Laplacian for image anomaly detection. Mach. Vision. Appl. 2020, 31, 11. [Google Scholar] [CrossRef] [Green Version]
- Gao, Z.; Gu, C.; Yang, J.; Gao, S.S.; Zhong, Y.M. Random weighting based nonlinear gaussian filtering. IEEE Access. 2020, 8, 19590–19605. [Google Scholar] [CrossRef]
- Matteoil, S.; Veracini, T.; Diani, M.; Corsini, G. A locally adaptive background density estimator: An evolution for RX-based anomaly detection. IEEE Geosci. Remote Sens. Lett. 2014, 11, 323–327. [Google Scholar] [CrossRef]
- Gaucel, J.M.; Guillaume, M.; Bourennane, S. Whitening spatial correlation filtering for hysperspectral anomaly detection. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Philadelphia, PA, USA, 18–23 March 2005; pp. 333–336. [Google Scholar]
- Wright, J.; Peng, Y.G.; Ma, Y. Robust principal component analysis: Exact recovery of corrupted low-rank matrices via convex optimization. Adv. Neural Inf. Process. Syst. 2009, 87, 3–56. [Google Scholar]
- Yang, X.; Wu, Z.; Li, J.; Plaza, A.; Wei, Z.H. Anomaly detection in hyperspectral images based on low-rank and sparse representation. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1990–2000. [Google Scholar]
- Li, S.; Zhang, K.; Duan, P.; Kang, X.D. Hyperspectral Anomaly Detection with Kernel Isolation Forest. IEEE Trans. Geosci. Remote Sens. 2020, 58, 319–328. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | RX | LRX | CRD | WSCF | RPCA-RX | LRASR | KIFD | Ours |
|---|---|---|---|---|---|---|---|---|
| AUC | 0.9852 | 0.9971 | 0.9943 | 0.9840 | 0.9787 | 0.9621 | 0.9910 | 0.9981 |
| Algorithm | RX | LRX | CRD | WSCF | RPCA-RX | LRASR | KIFD | Ours |
|---|---|---|---|---|---|---|---|---|
| AUC | 0.9858 | 0.9541 | 0.9363 | 0.9869 | 0.9925 | 0.9713 | 0.9965 | 0.9998 |
| Algorithm | RX | LRX | CRD | WSCF | RPCA-RX | LRASR | KIFD | Ours |
|---|---|---|---|---|---|---|---|---|
| AUC | 0.9909 | 0.9992 | 0.9946 | 0.9988 | 0.9902 | 0.9997 | 0.8908 | 0.9997 |
| Beach_Plane | Saliens_Synthetic | Road_Vehicle | |
|---|---|---|---|
| RX | 0.9852 | 0.9858 | 0.9909 |
| LRX | 0.9971 | 0.9541 | 0.9992 |
| CRD | 0.9943 | 0.9363 | 0.9946 |
| WSCF | 0.9840 | 0.9869 | 0.9988 |
| RPCA-RX | 0.9787 | 0.9925 | 0.9902 |
| LRASR | 0.9621 | 0.9713 | 0.9997 |
| KIFD | 0.9910 | 0.9965 | 0.8908 |
| Ours | 0.9981 | 0.9998 | 0.9997 |
| Algorithm | RX | LRX | CRD | WSCF | RPCA-RX | LRASR | KIFD | Ours |
|---|---|---|---|---|---|---|---|---|
| AUC | 0.9526 | 0.9821 | 0.9570 | 0.9427 | 0.9655 | 0.9081 | 0.9800 | 0.9667 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Tang, J.; Zhou, H. Hyperspectral Anomaly Detection Based on Multi-Feature Joint Trilateral Filtering and Cooperative Representation. Appl. Sci. 2023, 13, 6943. https://doi.org/10.3390/app13126943
Li H, Tang J, Zhou H. Hyperspectral Anomaly Detection Based on Multi-Feature Joint Trilateral Filtering and Cooperative Representation. Applied Sciences. 2023; 13(12):6943. https://doi.org/10.3390/app13126943
Chicago/Turabian StyleLi, Huan, Jun Tang, and Huixin Zhou. 2023. "Hyperspectral Anomaly Detection Based on Multi-Feature Joint Trilateral Filtering and Cooperative Representation" Applied Sciences 13, no. 12: 6943. https://doi.org/10.3390/app13126943