1. Introduction
Pipeline systems are omnipresent in industry, shipbuilding, construction, petroleum, and other fields for transporting oil, gas, and petrochemical products. Over time, due to the material aging, stress concentration, humid environment, and other adverse factors, defects like cracks, corrosion, and notches are likely to appear in pipelines, which may compromise their safety and economy [
1,
2,
3]. Hence, it is fundamental to apply nondestructive testing (NDT) on pipes to ensure reliable operation and avoid catastrophic failure. However, conventional NDT methods may fail to detect defects in inaccessible regions, where potential risks arise as a result of the long detection time [
4]. Ultrasonic guided wave (UGW) testing shows high-efficiency, non-contact, long-distance, and large-scale detection capabilities, which can be applied to check the structural integrity of buried, coated, and liquid filled pipelines [
5,
6].
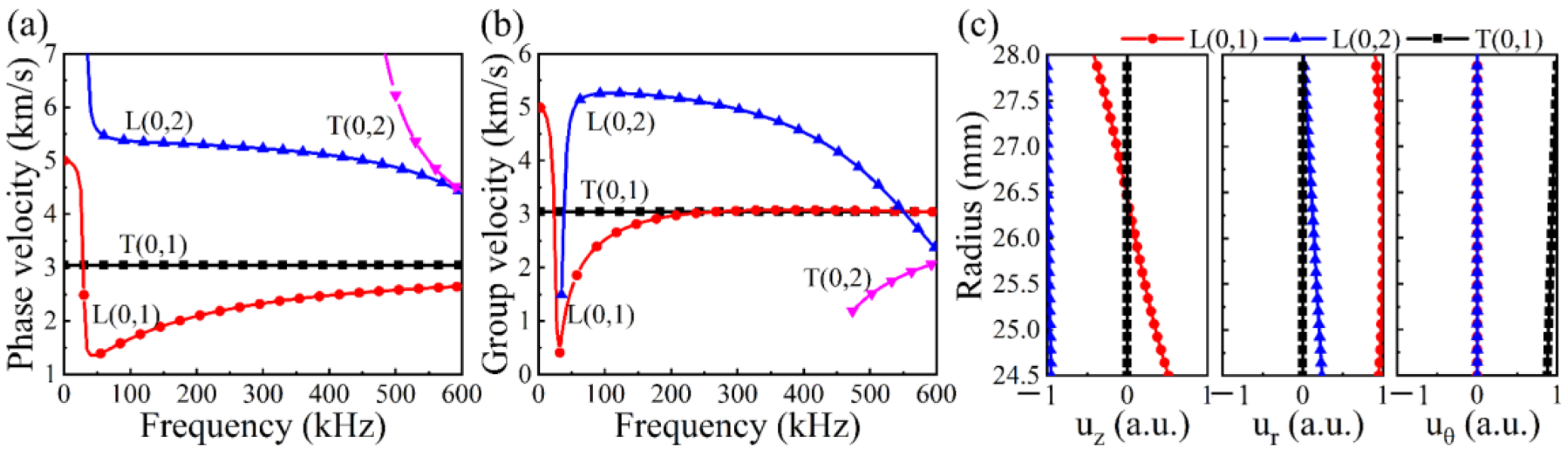
At the aim of reducing the interpretation complexity of UGW signals, it is popular to utilize axisymmetric UGWs (longitudinal L(0,
m) and torsional T(0,
m)) in their non-dispersive frequency bands instead of non-axisymmetric UGWs (flexural F (
n,
m), where
n and
m denote the circumferential order and mode [
7]). Two inherent characteristics of dispersion and multi-mode in UGW are inevitably manifested as the UGW velocity varies with the frequency, and as multiple modes of UGWs exist at a given frequency [
8,
9]. In this context, it is almost impossible to excite the pure UGW at the desired mode, whilst UGWs at undesired modes may be excited for imperfect experimental conditions and multi-mode characteristics. In addition, for the mode conversion caused by the interaction between non-axisymmetric defects and UGWs, dispersive flexural UGWs may arise, which may increase the interpretation complexity and further weaken the ability of defects detection [
10,
11].
In order to enhance the defect identification and classification of UGW testing, several signal processing methods based on time-frequency analysis have been introduced, including Winger–Ville distribution [
12], Hilbert–Huang transform [
13], wavelet transform [
14], and Chirplet transform [
15]. However, the improvement of UGW signal resolution processed by the above methods is limited, and more effective signal processing methods need to be found. At present, signal processing methods aimed at improving the signal-to-noise ratio (SNR) of UGW signals are mainly through separation and elimination of dispersive UGWs; the former is typically represented by matching pursuit (MP) [
9,
16], and the latter includes dispersion compensation (DC) [
17,
18], pulse compression (PuC) [
19,
20], and split spectrum processing (SSP) [
10,
21]. MP is a sparse approximation algorithm, which is based on the construction of an appropriate over-complete and redundant dictionary and finding the best matching of UGW signals in the dictionary. Although MP can separate overlapping UGWs at different modes, the processing results are highly dependent on the quality of the constructed dictionary, which is accompanied by high computational complexity [
22]. DC is another signal processing method commonly applied in UGW testing, where the dispersive UGWs can be eliminated by reversing the effect of dispersion and multi-mode on the desired UGW in the time/space domain, and it can be utilized in combination with PuC [
17,
18]. Yucel et al. [
20] applied DC and PuC to improve the SNR of UGW signals of aluminum rods. Toiyama et al. [
23] proposed a method combining PuC and velocity DC in the wave-number domain to compensate for the wave distortion caused by dispersion, and the results showed that the time resolution and SNR of UGW signals were improved. However, DC and PuC need the prior knowledge of dispersion and pipeline structure, which is usually not available in the UGW testing of long-distance pipelines and unknown pipeline structures [
24].
SSP can split multi-mode UGWs by separating the received signal into a sub-signal group in the frequency domain and recombining them in the time domain without the knowledge of dispersion and propagation distance [
10,
21]. SSP was first applied to ground search radar operation [
25] and later to conventional ultrasonic detection [
26] to reduce the scattering effect of coarse crystals and improve the signal-to-noise ratio. It is rarely applied in the field of UGW testing, there are only a few studies on SSP processing of T(0,1) UGW signals, whereas the studies about the SSP processing of L(0,2) UGW signals cannot be found to the best of the authors’ knowledge. Pedram et al. [
10,
21,
27] applied T(0,1) UGW testing to a coated pipeline; SSP was used to eliminate the noise and improve the SNR, and determined the SSP filter parameters by brute force search method. However, the processing effect of SSP is directly related to the SNR of unprocessed UGW signals, namely high noise levels are harmful to the processing effect, and some defects may not be identified when SSP processes multi-defected UGW signals.
In order to compensate the shortcomings of SSP, this paper proposed an improved SSP (ISSP) based on the raised cosine filter bank with varying bandwidth and spacing, and applied variational mode decomposition (VMD) and wavelet transform (WT) to UGW signals before ISSP. The structure of this paper is as follows: the characteristics of UGWs were analyzed (
Section 2); signal processing methods used were introduced (
Section 3); SSP was improved by filter bank design, and the pros and cons of ISSP were analyzed (
Section 4); signal processing method based on VMD, WT, and ISSP (VWISSP) was proposed to process the UGW signals with noise and multi-defects (
Section 5); L(0,2) UGW testing was performed on aluminum and low carbon steel pipes containing different types and numbers of defects, and the processing effect of VWISSP was evaluated (
Section 6); and
Section 7 is the conclusion.
3. Ultrasonic Guided Wave Signal Processing Methods
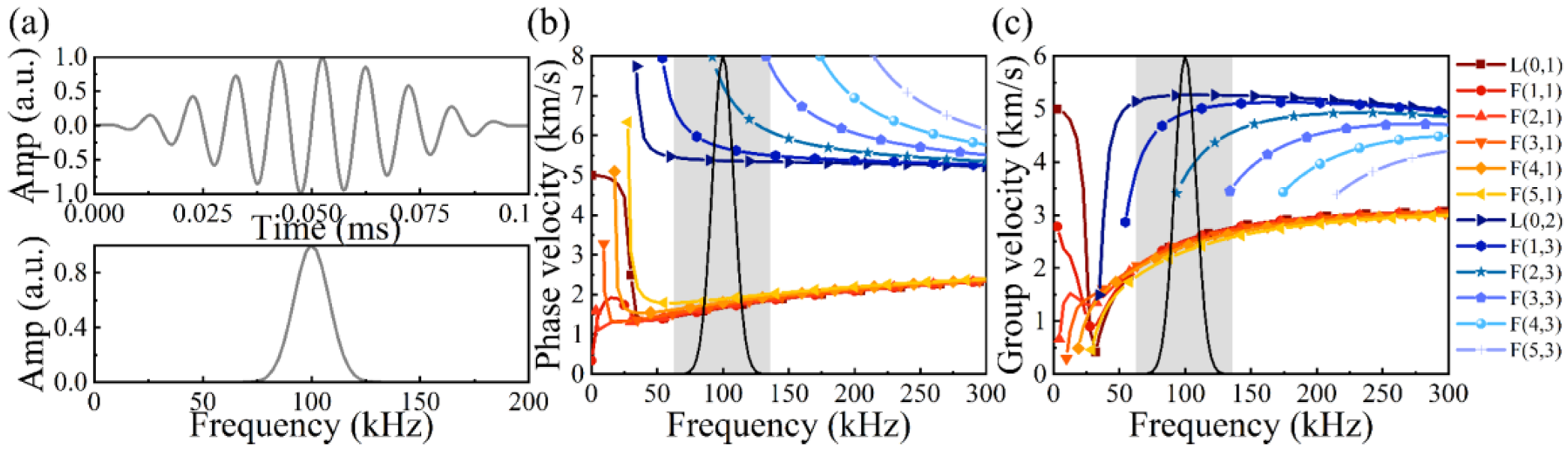
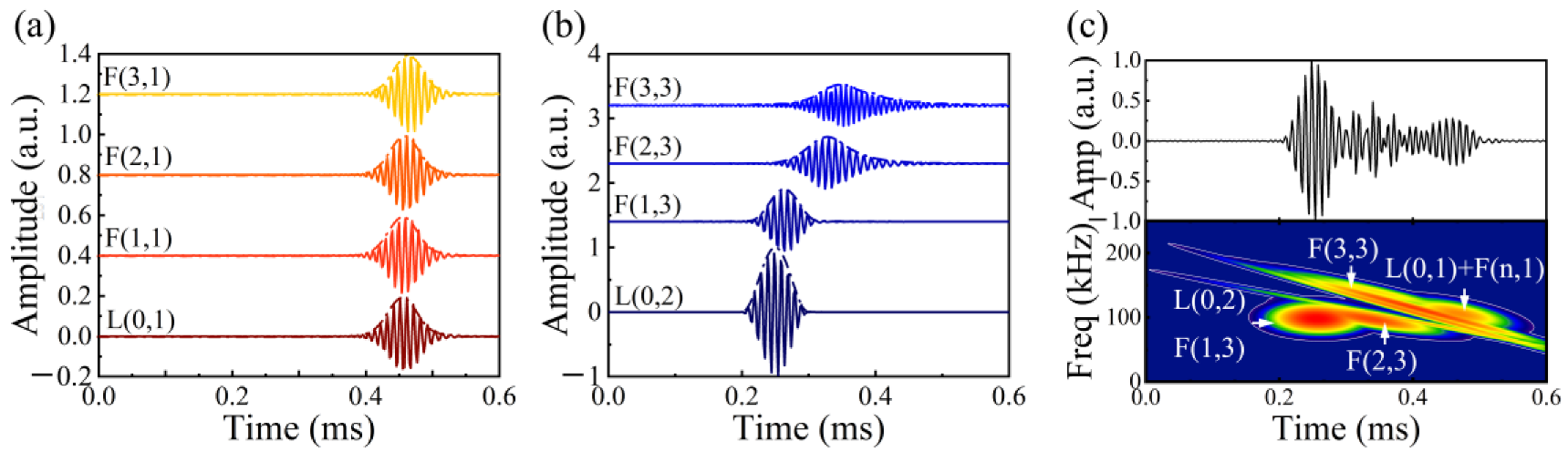
On the basis of UGW characteristics analysis, both undesired L(0,1) and desired L(0,2) UGWs could be excited, and they may be converted to coherent noise (F(n,1) and F(n,3) UGWs) for the interaction between non-axisymmetric defects and UGWs, and incoherent noise caused by the environment and instruments that are likely to interfere with UGW signals. It is beneficial for the accurate identification and location of defects to eliminate noise and retaining feature (defects and pipe end) signals, which can be realized by the following signal processing methods.
3.1. Split Spectrum Processing
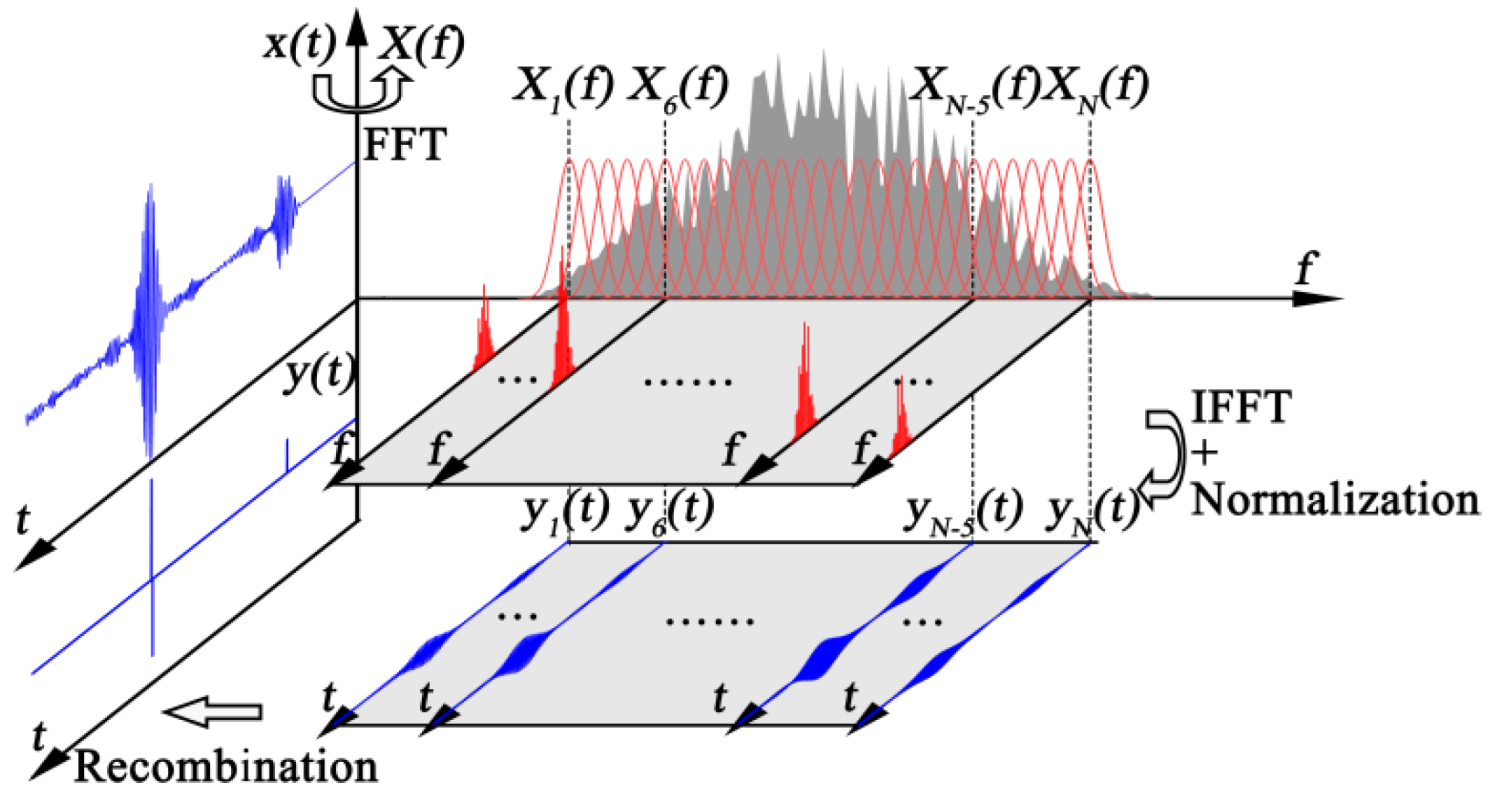
SSP is sensitive to the different frequencies of UGWs at the desired and other modes, that is, the processed sub-band signal group contains the desired mode UGW with a similar amplitude and other mode UGWs with different amplitudes [
10,
21,
27]. The schematic diagram of SSP (
Figure 3) can be described as follows. First, the fast Fourier transform (FFT) is applied to transform an input signal
x(
t) in the time domain into a frequency-domain signal
X(
f), which is split into a sub-band signal group
Xi(
f) (
i = 1,2,…,
N; where
N denotes the number of filters) in the frequency domain by an intersecting bandpass filter bank. Then, the inverse FFT (IFFT) on
Xi(
f) is employed and normalized to obtain a time-domain sub-band signal group
yi(
t). Finally, the nonlinear signal recombination methods are utilized to produce an output signal
y(
t).
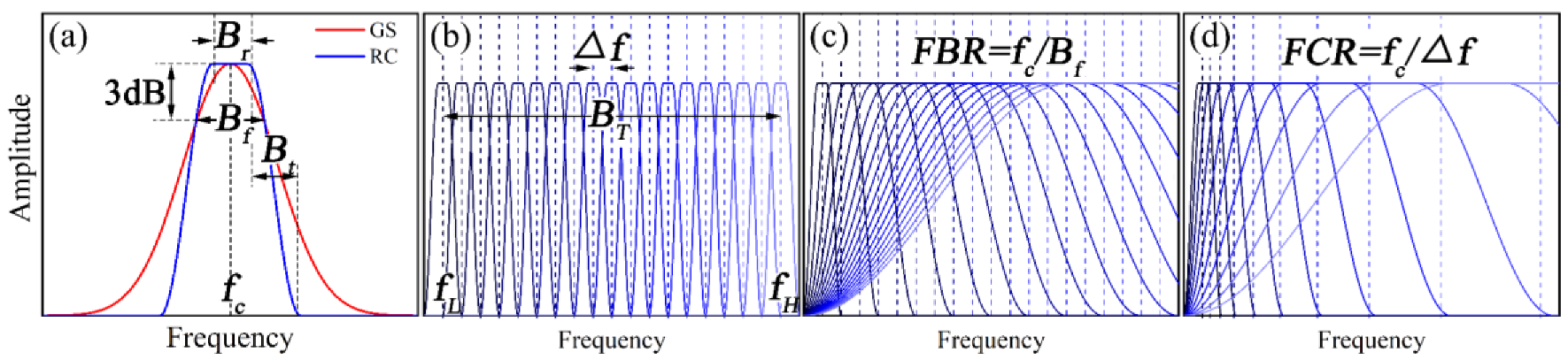
The processing effect of SSP is closely connected with the filter band design, filter band parameters, and signal recombination method, of which the first two will be discussed in
Section 4.1. The signal recombination methods considered of SSP are primarily based on order statistics and phase observation [
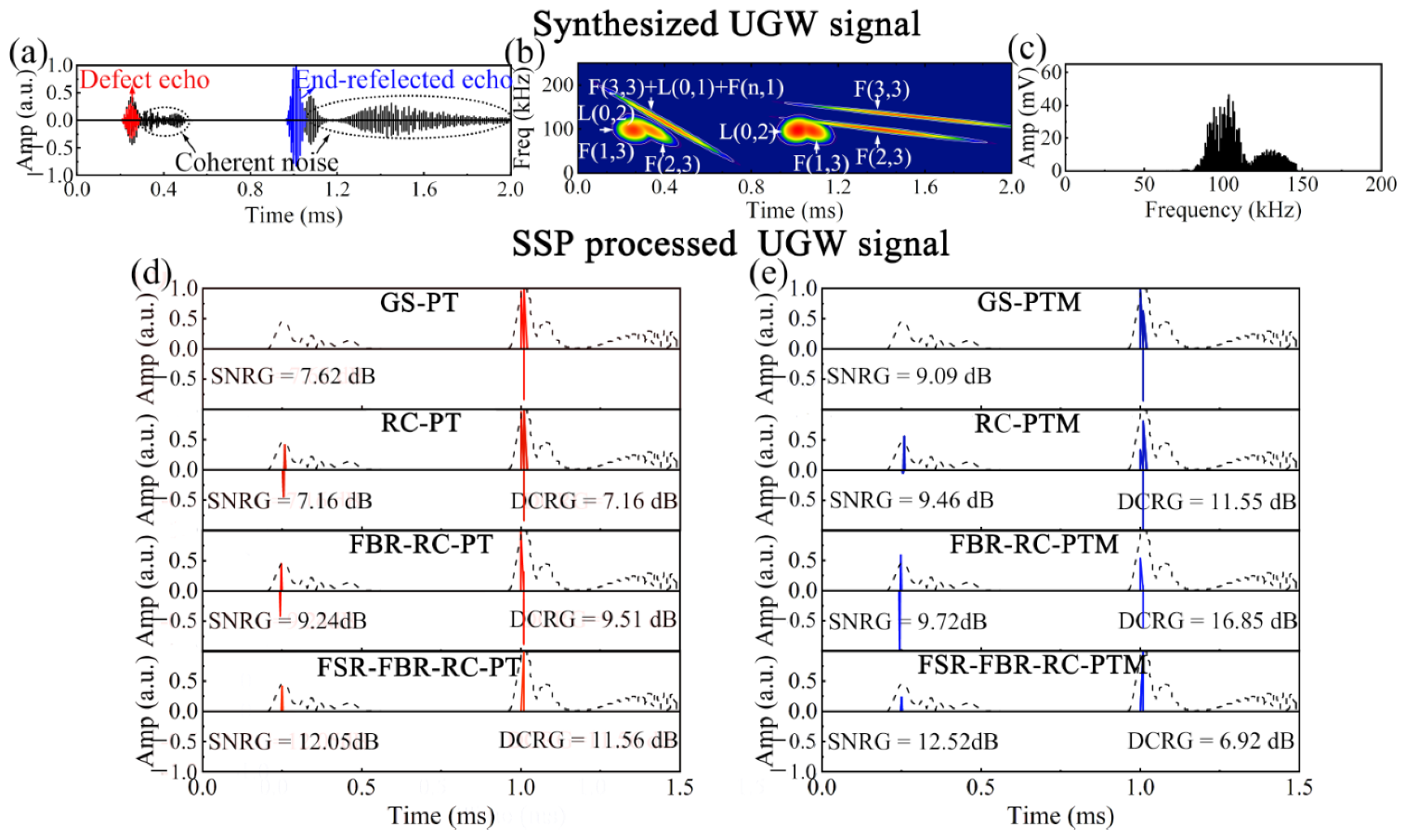
30], which includes normalized minimization, mean, frequency multiplication, polarity thresholding (PT), and polarity thresholding with minimization (PTM). In the light of our previous research [
31], the high resolution of sparse signals recombined by PT and PTM is likely to be obtained. PT can be expressed as:
PTM is similar with PT in form, which also requires that y(t) to take value (min |yi(t)|) only when the positivity and negativity of all sub-band signals at a certain time are consistent; otherwise, it is zero. Both PT and PTM can eliminate the coherent noise that is highly sensitive to the frequency, which is that the amplitude of the sparse signal recombined by PTM may be distorted, resulting in the inaccurate quantitative analysis results of defects.
3.2. Variational Mode Decomposition
Variational mode decomposition (VMD) can separate harmonic signals with a relatively close frequency range without affecting the sampling frequency, and improve signal SNR by eliminating incoherent noise [
32]. Compared with empirical mode decomposition (EMD), VMD has complete mathematical theory, which is more robust to sampling and noise, and shows better decomposition effect on complex non-stationary signals [
33]. In VMD, inherent mode functions (IMFs) are defined as AM-FM signals, which are expressed as [
34]:
where
Ak(
t) is the instantaneous non-negative amplitude,
φk(
t) is the undiminished phase function, namely the instantaneous frequency
.
The VMD model is expressed as follows [
35]:
where
k is the number of modes,
and
are the
kth IMF and the center frequency after decomposition,
is the Dirac delta function, and
is the symbol of convolution operation. The VMD process (Algorithm 1) can be concluded as follows: [
33,
34].
| Algorithm 1 VMD |
| , , , |
| repeat |
|
| fordo |
| Update for all |
| Update |
| end for |
| Dual ascent for all |
| until convergence |
| where , and are the frequency domain representations of the kth IMF signal to be decomposed to and the Lagrange operator , respectively, is the penalty factor, and is the noise tolerance, which are artificially set. |
When the number of modes K is set, the correct mode center frequency may not be obtained due to the narrow bandwidth of IMF caused by large , while low could lead to the incoherent noise having a higher level in IMF. The Lagrangian operator is directly affected by , which can enhance the convergence performance in the case of low noise and should be zero in the case of high noise.
3.3. Wavelet Transform
By adding window functions of different widths to the signal (wavelet transform (WT) applies a wider window function to observe the low frequency and a narrower window function to observe the high frequency), wavelet coefficients are obtained, and the signal can then be reconstructed by these coefficients [
36]. The wavelet coefficient can be calculated as follows:
where,
S and
L are the scaling and translation factors, and
is the mother wavelet functions.
By selecting an appropriate threshold T, wavelet coefficients larger than the threshold are considered to be generated by useful feature signals and should be retained, while wavelet coefficients smaller than the threshold are considered to be generated by useless noise signals and are set to zero [
37]. The new wavelet coefficients obtained by thresholding are:
3.4. Chirplet Transform
As a generalization of wavelet transform and short-time Fourier transform, Chirplet transform can extract signal components with a specific instantaneous frequency and group delay, and overcome the shortcomings of conventional time–frequency representation solutions, such as short-time Fourier transform and Wigner–Ville distribution, that may not achieve good UGW mode separation results. The standard definition of the Chirplet transform is given by the inner product of a basis function
g(
t) and the signal
x(
t) [
38]:
where * denotes the complex conjugate,
g(
t) is the basic function and the Fourier transform of the basic function,
Tt0,
Fω0,
Ss,
Qq, and
Pp are the time shift, frequency shift, scaling, frequency shear, and time shear operators, respectively, and
c(
t) is one of the chirp signal family.
5. Signal Processing Method based on VMD, WT and ISSP
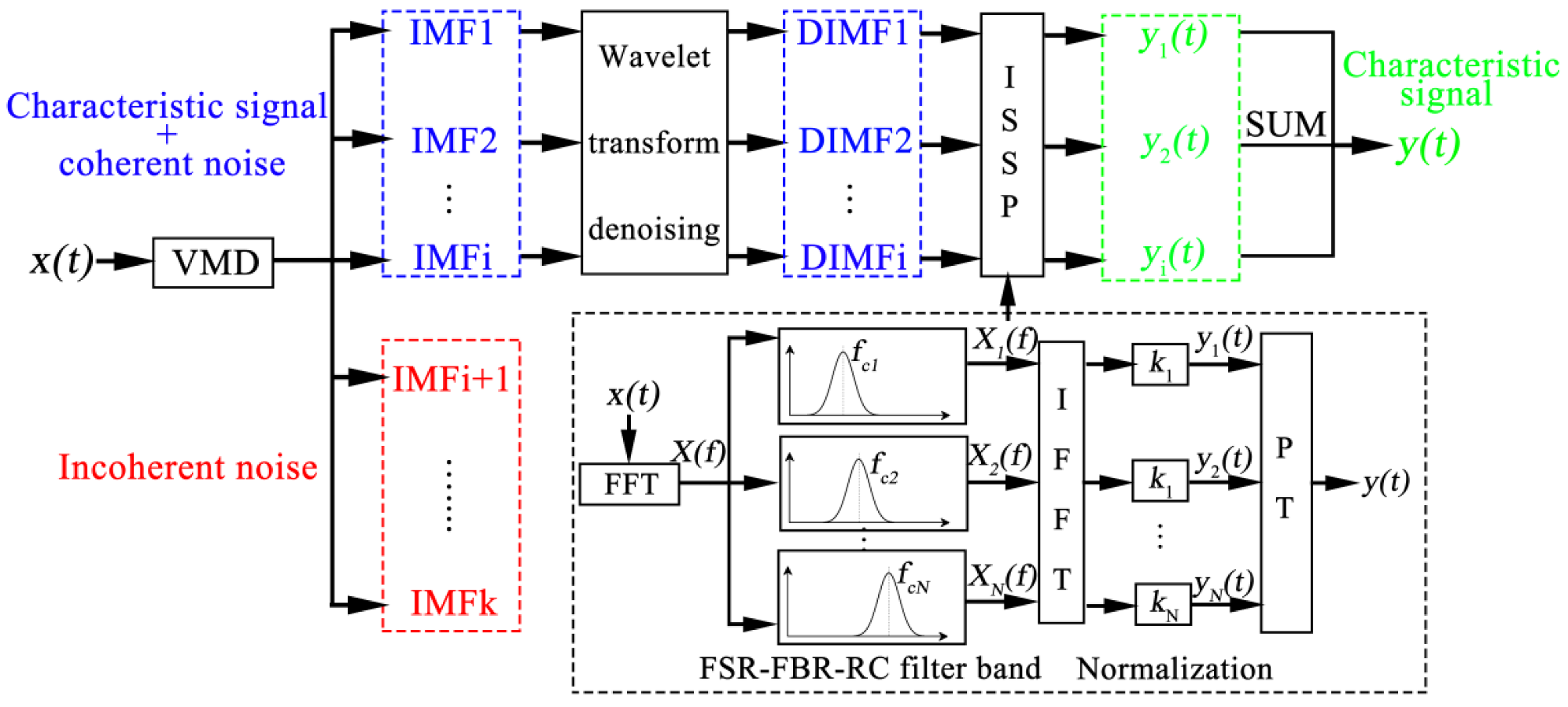
The reason why ISSP may fail in the case of high noise level and multiple defects is related to the low SNR of UGW signal before processing, which can be improved by the denoising function of variational mode decomposition (VMD) and wavelet transform (WT). Therefore, it is promising to combine VMD, WT, and ISSP (VWISSP) to process UGW signals, whose schematic diagram is illustrated in
Figure 9. Firstly, the UGW signal
x(
t) was processed by VMD to obtain the IMFs, which were classified into useful features and useless incoherent noise according to the correlation analysis. Then, the useless IMFs containing incoherent noise are discarded, and the useful IMFs are denoised by WT to obtain DIMFs. Finally, DIMFs are processed by ISSP to obtain
yi(
t), which are summed to obtain
y(
t) containing only feature signals.
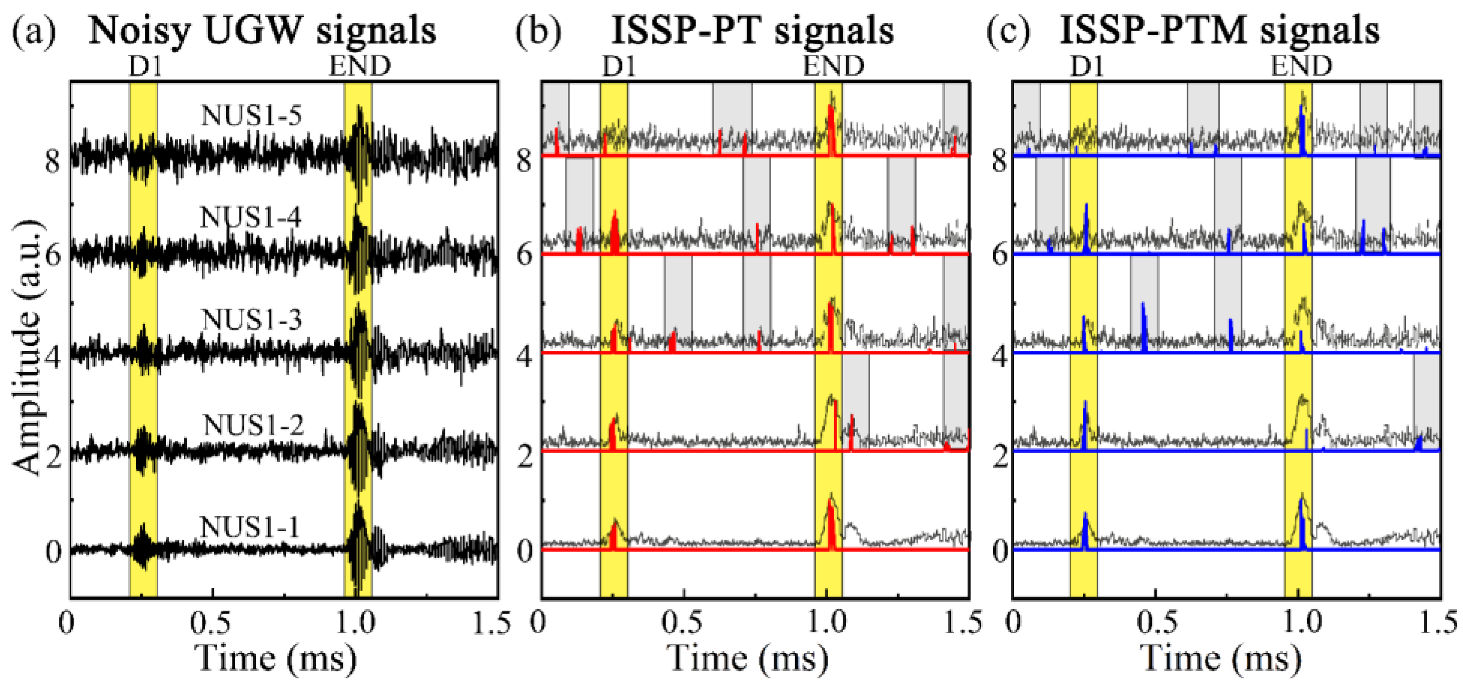
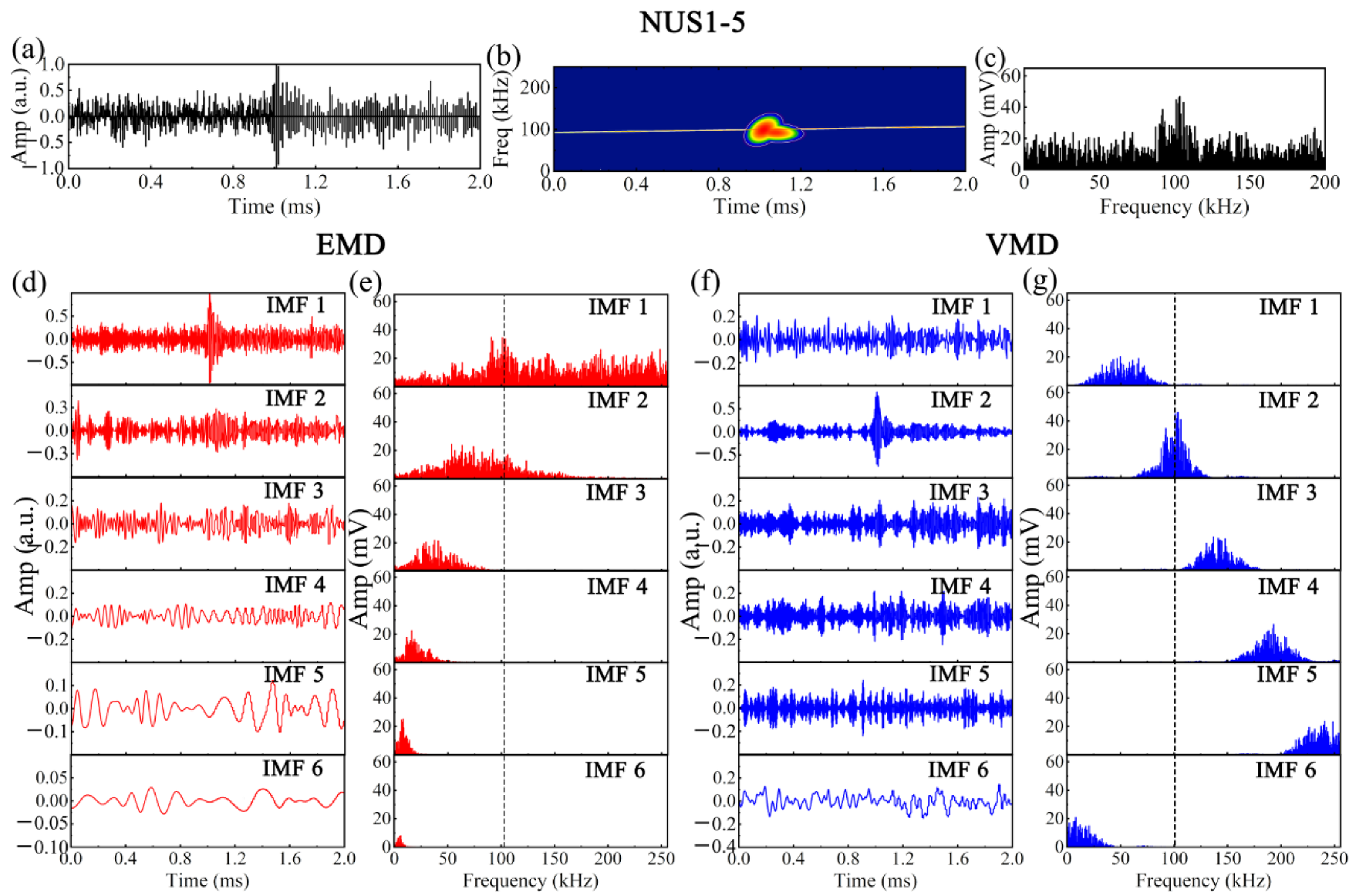
Due to the significant influence of incoherent noise, it is difficult to distinguish the defect signal from the NUS 1–5 in the time and time-frequency domains (
Figure 10a,b), while the spectrum may also be polluted (
Figure 10c). After performing EMD and VMD on NUS 1–5, the resulting first six IMFs in time and frequency domains are shown in
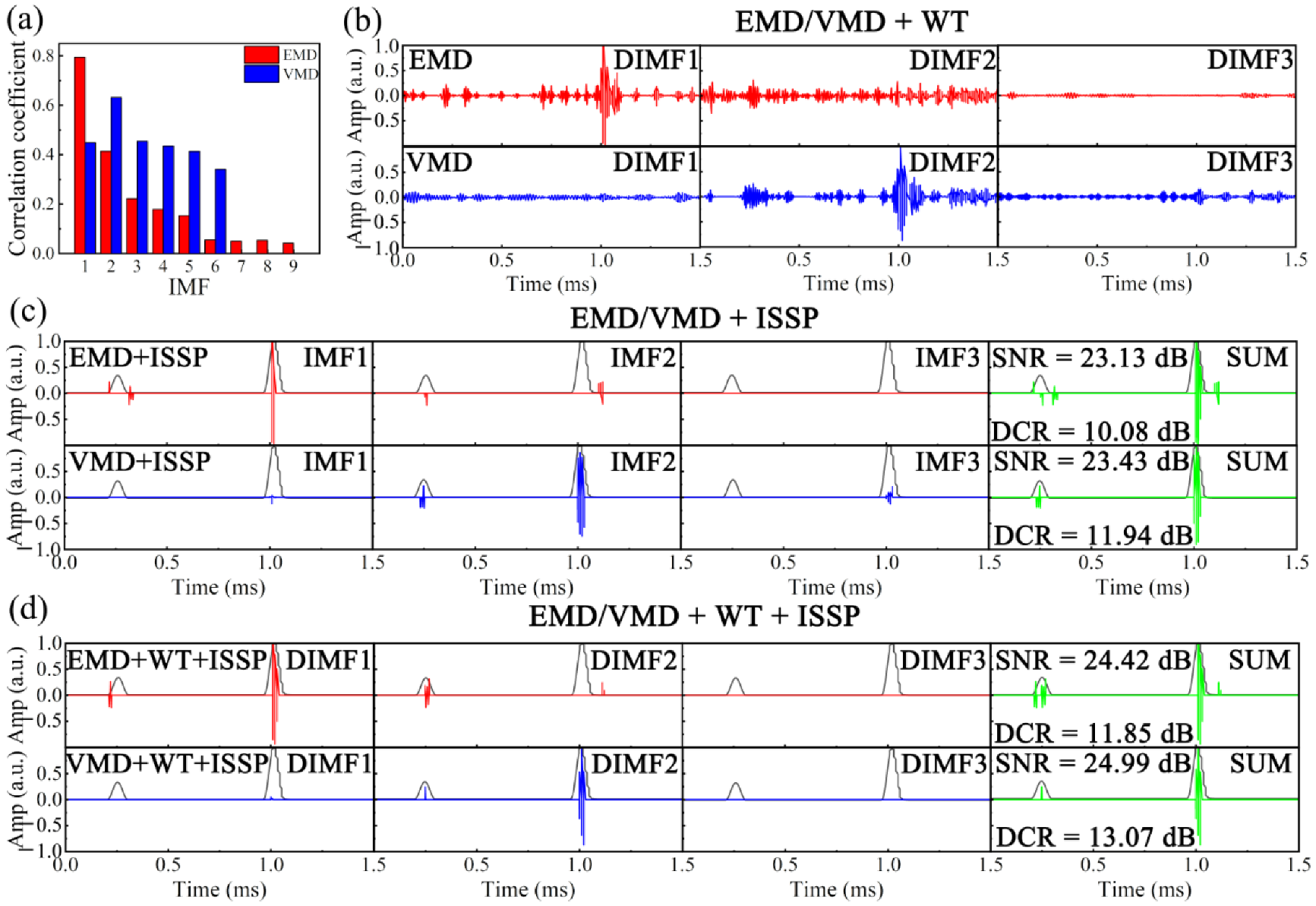
Figure 10d-g, and their correlation coefficients with NUS 1–5 are calculated (
Figure 11a). It can be noticed that IMF 1 and IMF 2 of EMD show the highest similarity with NUS 1–5, of which the correlation coefficients are 0.79 and 0.41, and the features in IMF 1 and IMF 2 are the pipe end and the defect, and other IMFs can be considered as having no practical significance. Only IMF 2 with the highest correlation coefficient (0.63) of VMD is concentrated around 100 kHz, indicating that all features can be revealed through IMF 2, and the rest of IMFs can be considered as the incoherent noise.
It can be found from
Figure 11b that WT can enhance the resolution of IMFs and the features of DIMFs become more obvious, and the sparse signals of IMFs and DIMFs after applying ISSP are shown in
Figure 11c,d. Compared with ISSP, E/VMD + ISSP can significantly reduce the misjudgments and further improve the signal resolution. However, multiple peaks would appear in the defect region processed by EMD + ISSP, which confuses the accurate identification of defects, while VMD + ISSP has no such trouble. Thanks to the denoising of WT, the resolution of sparse signals processed by E/VMD + WT + ISSP are enhanced further, of which SNRs are 24.42 dB and 24.99 dB, and DNRs are 11.85 dB and 13.07 dB.
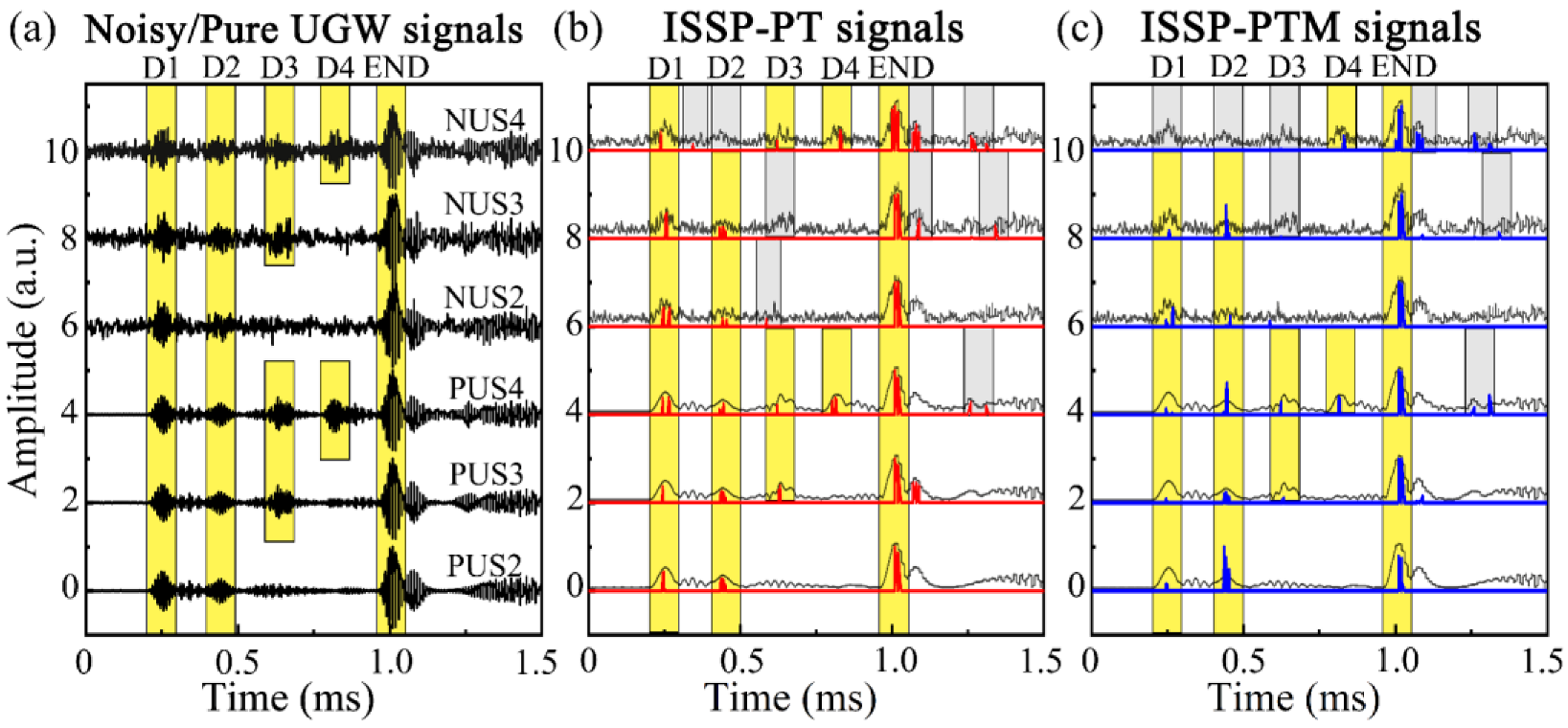
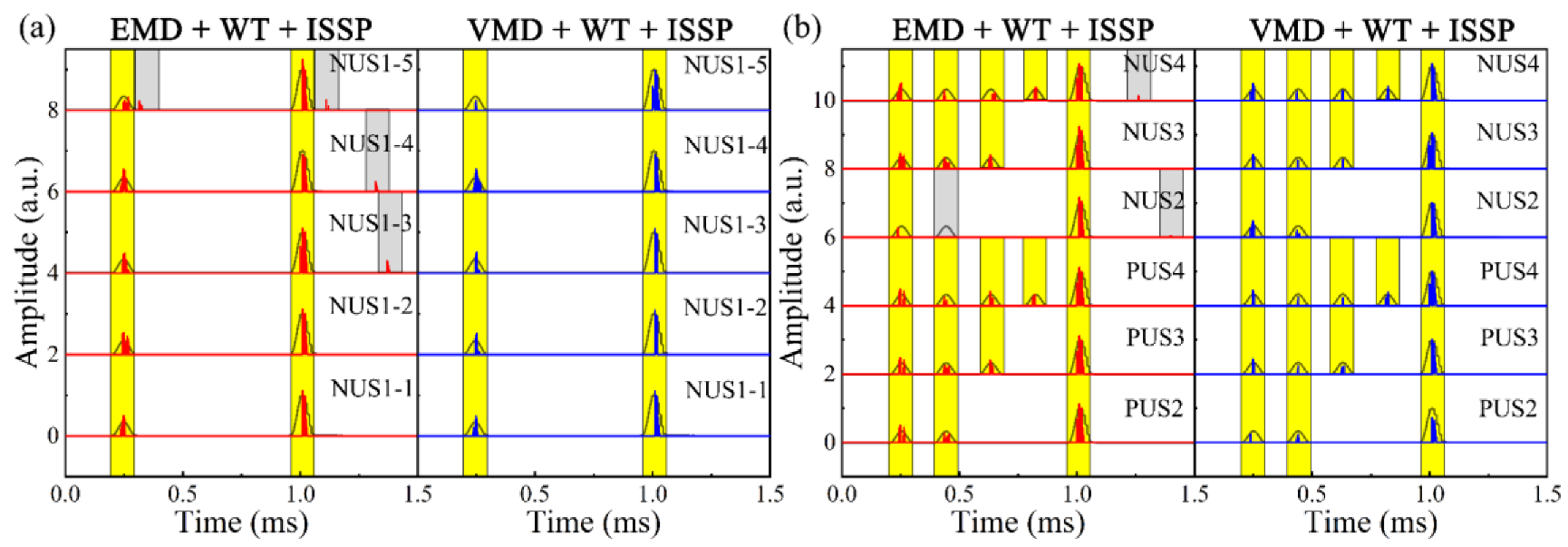
The denoting results of the E/VMD + WT + ISSP as E/VWISSP, which were applied to NUS and PUS in
Section 4, are illustrated in
Figure 12, and the calculated SNRG, DNRG, and number of misjudgments are shown in
Table 1. Compared with ISSP, EWISSP and VWISSP can further improve the signal resolution, with the average SNRG increased by 13.76% and 25.73%, respectively, and the average DNRG increased by 12.43% and 23.95%, respectively. However, EWISSP cannot retain the features and eliminate noise completely. Therefore, VWISSP based on VMD, WT and ISSP can be considered as the most suitable method to gain the sparse UGW signals with high accuracy and resolution, of which only feature signals are retained and noise signals are eliminated completely.
6. Experiments of Ultrasonic Guided Wave Testing
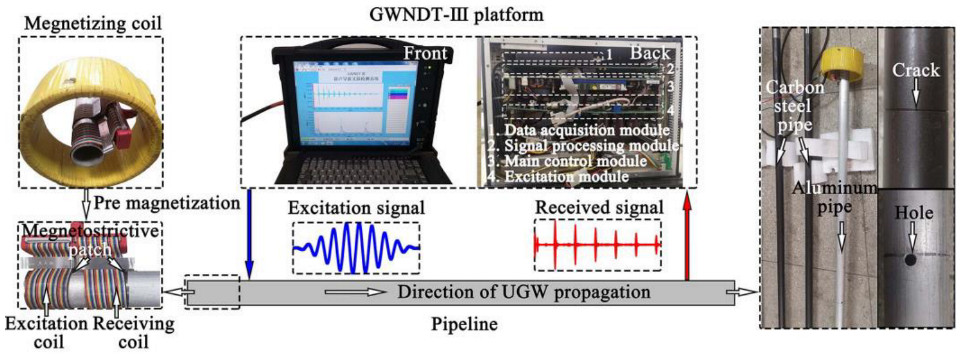
UGWs can be excited and received based on the principles including, but not limited to, magnetostriction, piezoelectricity, and electromagnetism. Magnetostrictive UGW testing was chosen for the ease of implementation, low cost, and excellent sensitivity and durability, of which the schematic diagram is shown in
Figure 13. The magnetostrictive UGW testing system includes a self-made GWNDT-III platform, magnetizing coil, magnetostrictive patch (FeCo alloy), excitation/receiving coils and pipe; and the GWNDT-III platform integrates the modules of main control, excitation, data acquisition, and signal processing, which can realize the excitation and reception of UGW conveniently.
The principle of magnetostrictive UGW testing is as follows [
41]. Firstly, ensure that the magnetostrictive patch is in a state of maximum magnetostriction rate pre-magnetizing the magnetization coil. Secondly, excite the excitation signal using the GWNDT-III platform, which generates dynamic magnetostriction in the form of UGW based on positive magnetostrictive effect. Finally, the induced voltage signal of the receiving coil resulting from the variation of magnetic field strength near the magnetostrictive patch based on the inverse magnetostrictive effect can be captured, which is processed and exhibited by the GWNDT-III platform.
6.1. Aluminum Pipe
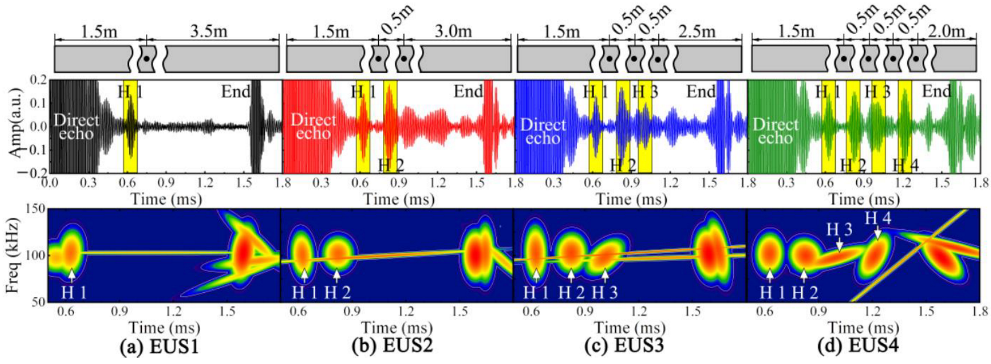
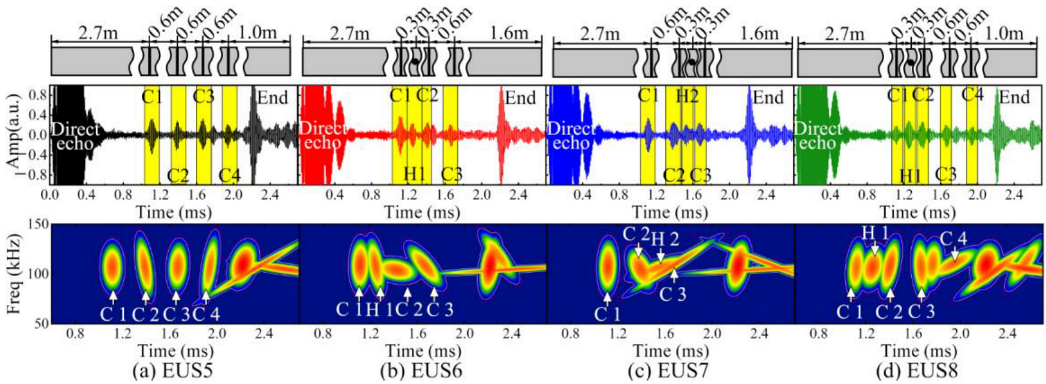
The hole defects (H1, H2, H3, and H4) with diameters of 10 mm were artificially set on the surface of the aluminum pipe, of which their axial positions are illustrated in the upper
Figure 14, and the L(0,2) UGW testing signals for the above aluminum pipes are shown in the middle
Figure 14. It can be observed that UGW signals mainly comprise of direct echo, defect echo, end-reflected echo, and noise signal (coherent and incoherent noise). With the increase of the number of defects, the noise level, especially the coherent noise level, increases significantly, which can be attributed to the reflection, refraction, and mode conversion of UGWs, and it can be found that the defect resolution becomes poor in EUS 3 and 4. Removing the direct echo that is seriously affected by electromagnetic radiation, and applying the Chirplet transform to the residual signals, creates the results shown in the bottom
Figure 14. Although Chirplet transform shows the defects clearly in time-frequency domain, the accurate localization of defects may not be achieved due to the interference of noise.
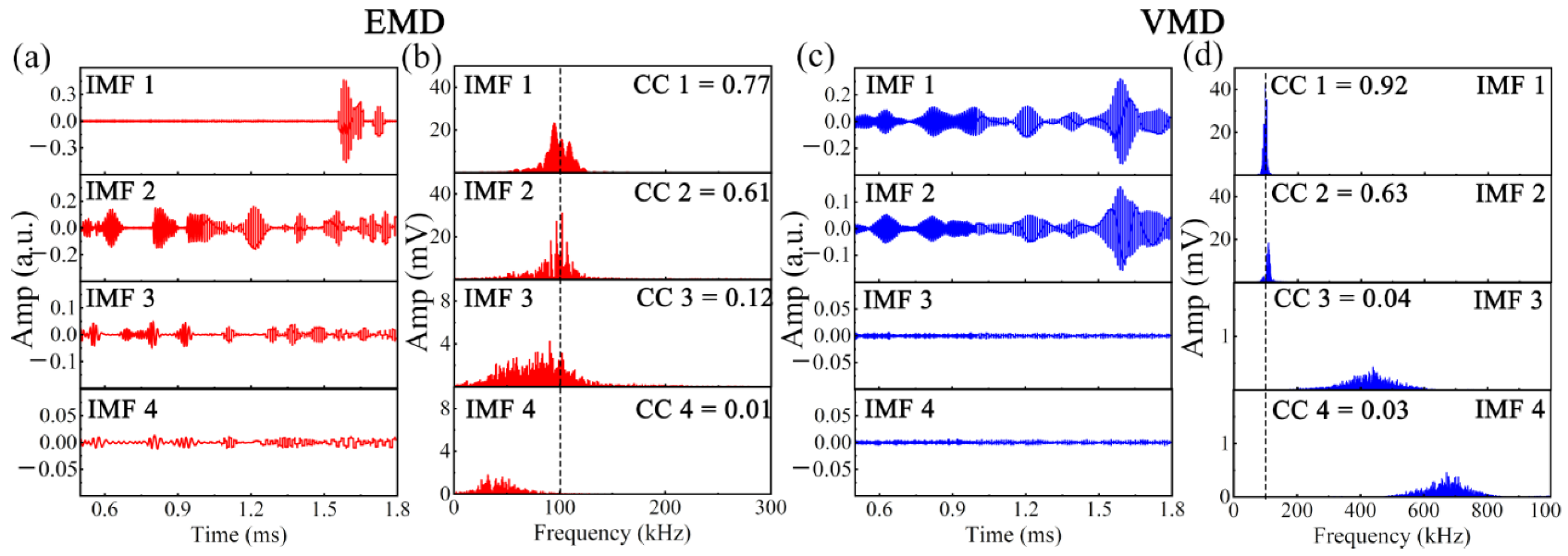
The first four IMFs of EUS 4 were gained by EMD and VMD, which are shown in
Figure 15. It can be found that the first two IMFs of EMD and VMD show high similarity with EUS 4, and it can be considered that the IMF 1 and IMF 2 of EMD contain the features of pipe end and defect, respectively, and both the IMF 1 and IMF 2 of VMD contain all features.
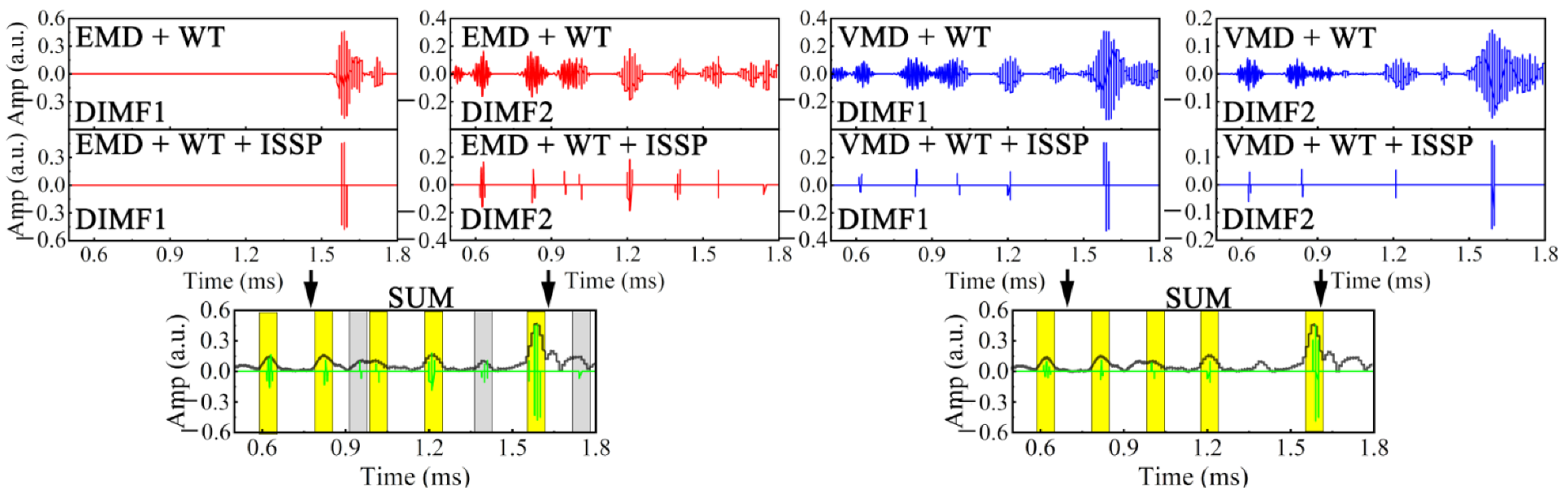
Figure 16 shows the results after discarding the meaningless IMFs of EMD and useless IMFs (incoherent noise) of VMD, performing WT on the substantial IMFs (IMF 1 and 2) to get DIMFs, and applying the ISSP to the DIMFs. It can be seen that VWISSP can completely retain the features and eliminate the noise, thus realizing the high accuracy and resolution processing of the UGW signal, while EWISSP may mistakenly retain the coherent noise as the features.
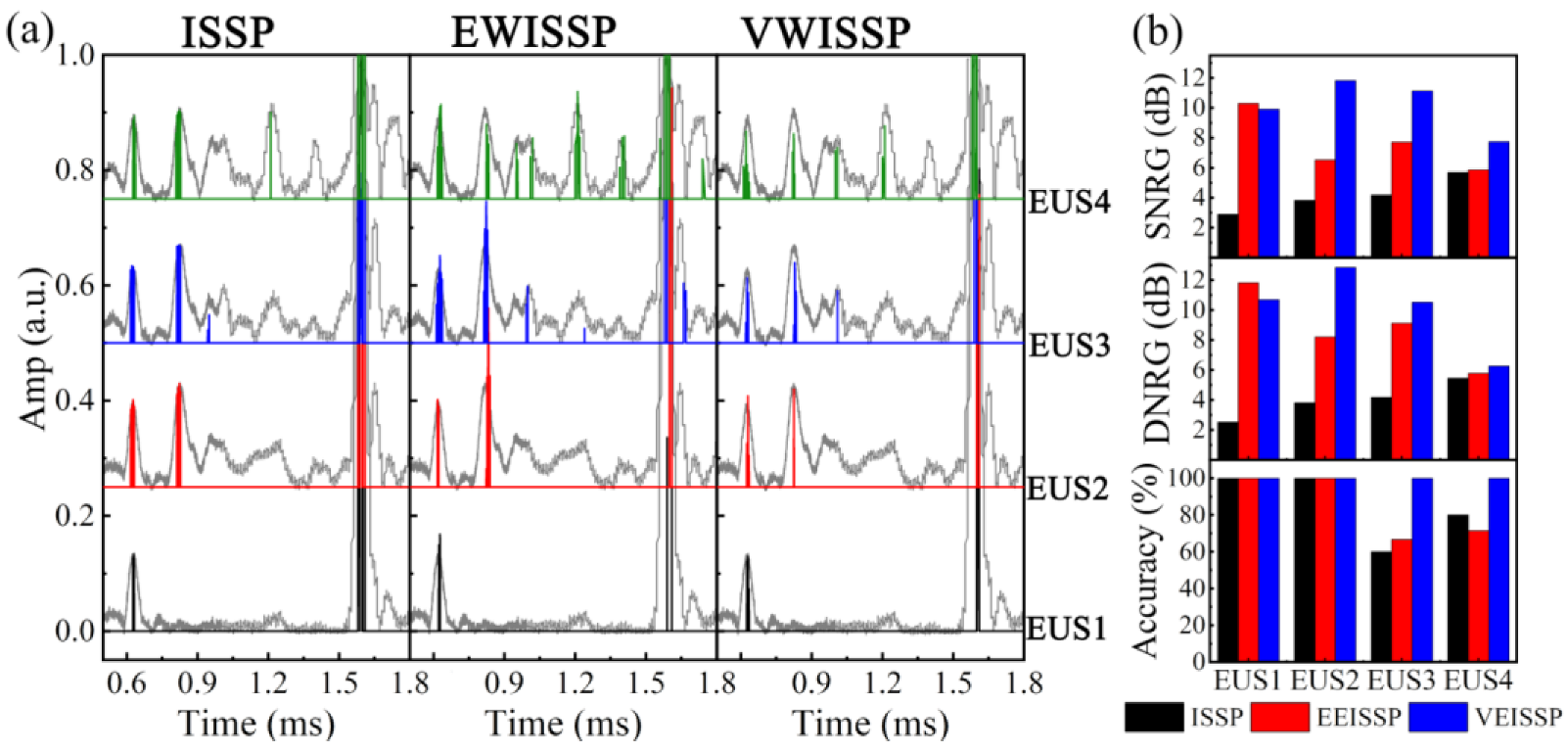
ISSP, EWISSP and VWISSP were used to process EUS 1 to 4, and the SNRGs, DNRGs and accuracies of the processed sparse signals were calculated, for which the accuracy calculation formula is shown in Equation (12), and the results are shown in
Figure 17.
where,
is the number of features,
is the number of misjudgments (the sum of uneliminated noise signals and unrecognized feature signals
).
From the perspective of signal resolution, the higher signal resolution is conducive to the location of pipe features. Therefore, the effect of ISSP is relatively poor, the average SNRG and DNRG are 4.15 dB and 3.99 dB, respectively. The effect of EWISSP is improved, for which the average SNRG and DNRG are 7.60 dB and 8.74 dB, respectively. The effect of VWISSP is the best, for which the average SNRG and DNRG are as high as 10.15 dB and 10.08 dB, respectively. From the perspective of detection accuracy, they can all achieve 100% recognition of pipe features when the defects are few (NUS 1 and 2), but ISSP and EWISSP may miss defect signals or identify noise as defect signals mistakenly if there exists relatively many defects (NUS 3 and 4), which is manifested by a reduction in accuracy from 60% to 80%.
6.2. Low Carbon Steel Pipe
The crack defects (width 2 mm, depth 2 mm, circumferential angle 300°) and hole defects (diameter 10 mm) were artificially set on the surface of a low carbon steel pipe (outer diameter 48 mm, wall thickness 5 mm, length 5.5 m), and their axial positions are illustrated in the upper
Figure 18. The L(0,2) UGW signals are shown in the middle of
Figure 18. It can be concluded that both time domain analysis and Chirplet transform (bottom
Figure 18) would not meet the accurate recognition and localization of defects.
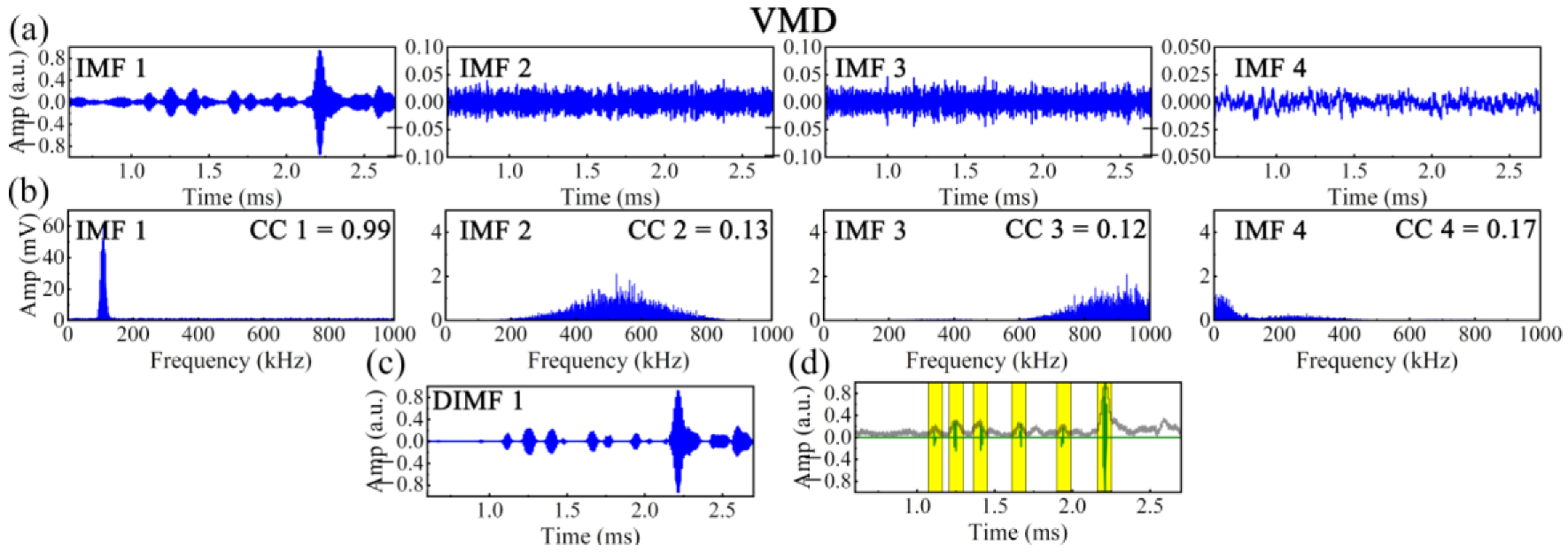
The processing results of VMD, VMD + WT, and VMD + WT + ISSP on EUS 8 are shown in
Figure 19. The correlation coefficient of IMF 1 is 0.99, which includes all the feature signals. The correlation coefficient of IMF 2 to 4 is between 0.12 and 0.17, which mainly includes the incoherent noise. The SNR of DIMF 1 is improved by WT denoising by further eliminating noise while preserving the feature signals. After applying ISSP to DIMF 1, there is no noise signal completely in the sparse signal, so the accurate defect recognition and localization can be realized.
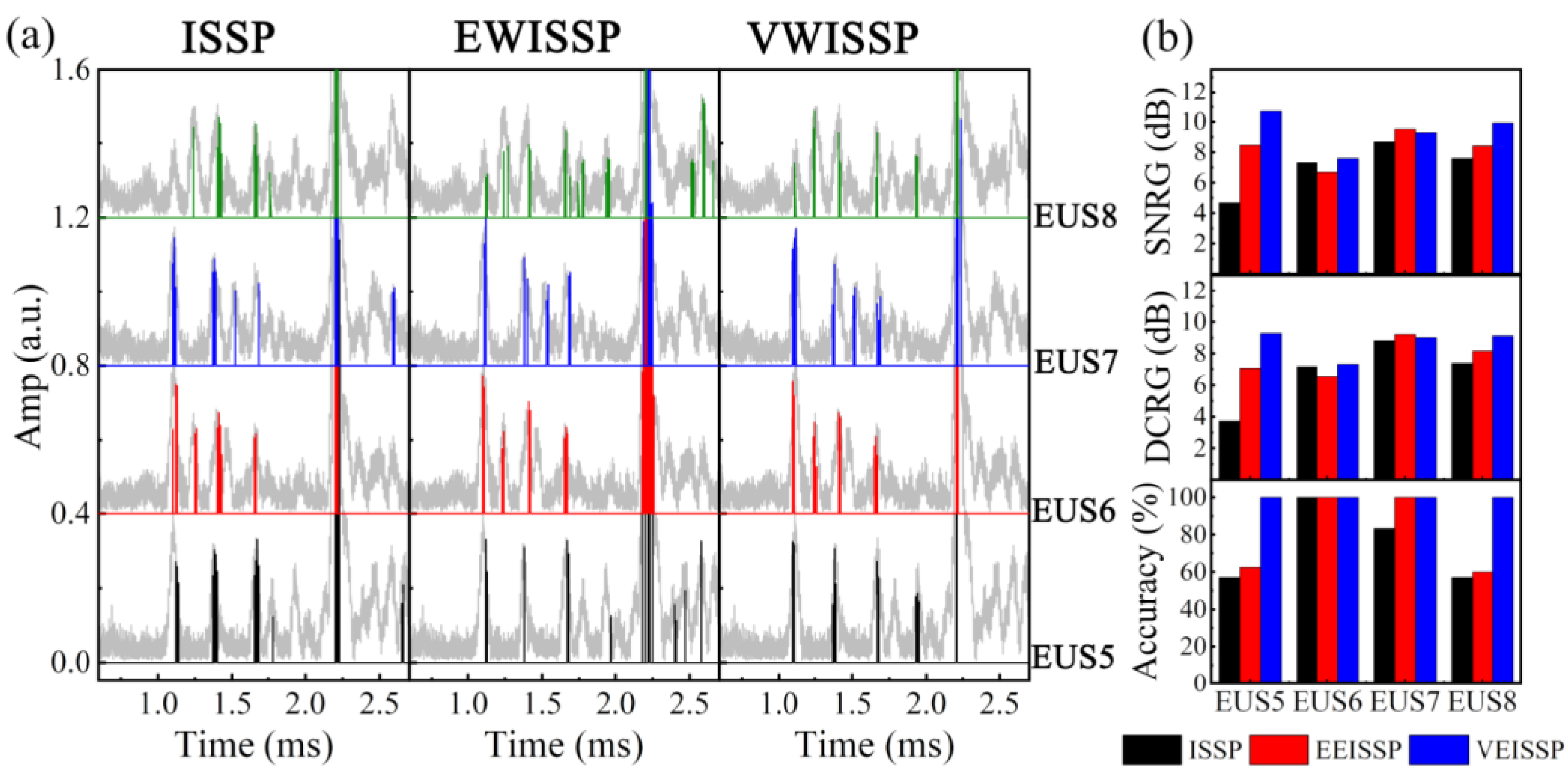
ISSP, EWISSP, and VWISSP were used to process EUS 5 to 8, and the SNRGs, DNRGs and accuracies of the sparse signals were calculated, and the results are shown in
Figure 20. The three methods can be ranked according to the processing effect as follows: VWISS > EWISSP > ISSP. The average SNRG, DNRG, and accuracy of VWISSP are 9.41 dB, 8.68 dB, and 100%, respectively, while the average SNRG, DNRG, and accuracy of ISSP are 7.07 dB, 6.77 dB, and 74.37%, respectively, which are improved by 32.97%, 28.25%, and 34.46%, respectively. To sum up, VWISSP has the promising ability to manifest the feature signals (defect and pipe end) in the form of obviously sparse signals, which solves the problems of the poor processing effect of ISSP on the UGW signals with high noise levels and multiple defects, and realizes the accurate recognition and location of defects.
7. Conclusions
An advanced signal processing method based on variational mode decomposition (VMD), wavelet transform (WT), and improved split spectrum processing (ISSP) was proposed to improve the signal interpretation accuracy of the L(0,2) ultrasonic guided wave (UGW) signals, of which SSP may not achieve great pipe feature preservation on noisy multi-defect UGW signals.
To begin with, it is essential to illustrate the UGW characteristics of dispersion and multi-mode, and UGW signals were divided into signals of features (desired UGW), coherent noise (undesired and non-axisymmetric UGWs), and incoherent noise (environmental noise). SSP was improved by replacing the Gaussian filter bank with cosine filters of constant frequency-to-bandwidth and frequency-to-filter spacing ratios (FSR-FBR-SSP), of which the pros and cons were revealed.
The enhancement effects of VMD and WT on the signal to noise ratio (SNR) were exploited: combining them with ISSP is more beneficial to preserving features (defects and pipe end) and eliminating noise, which is inducive to obtain better signal interpretation accuracy. The L(0,2) UGW testing was performed on aluminum and low carbon steel pipes containing different types and numbers of defects, and the signal processing method based on VMD, WT, and ISSP (VWISSP) was applied on the UGW signals. The signal-to-noise ratio gain (SNRG), defect-to-coherent noise gain (DNRG), and feature accuracy were introduced, and the results illustrated that VWISSP shows better capacity for obtaining the sparse UGW signals with high accuracy and resolution compared with ISSP, of which only feature signals are retained and noise signals are eliminated completely.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}