
A Mobile Gait Training System Providing an Active Interaction


Abstract
:1. Introduction
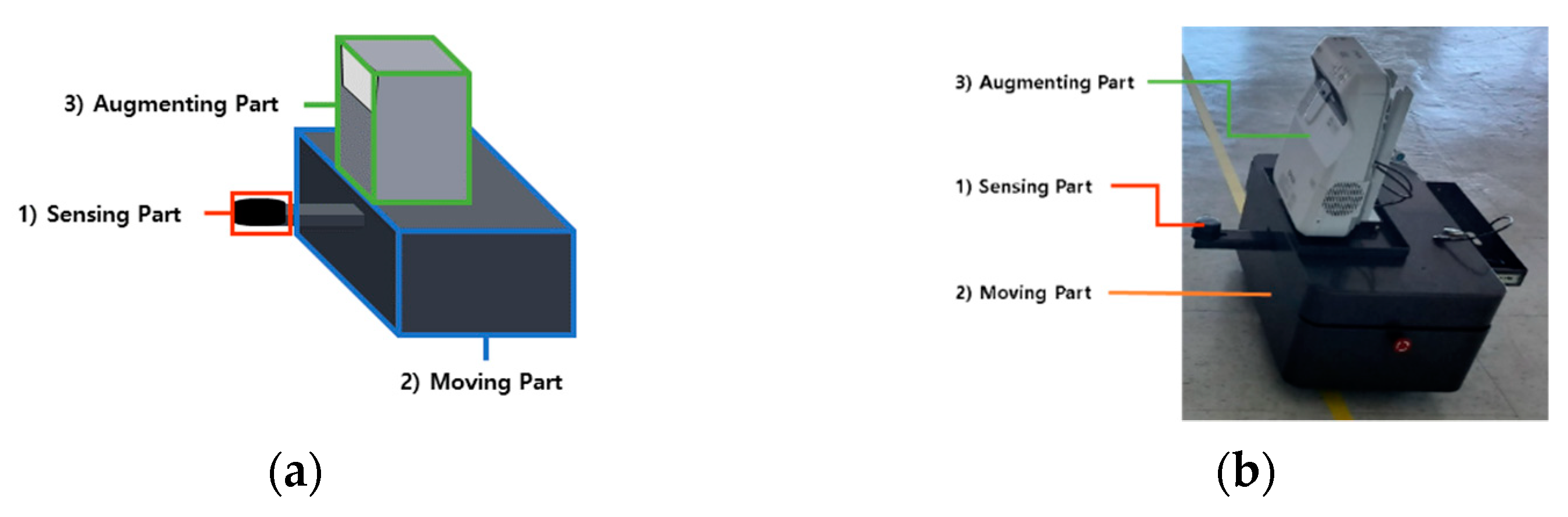
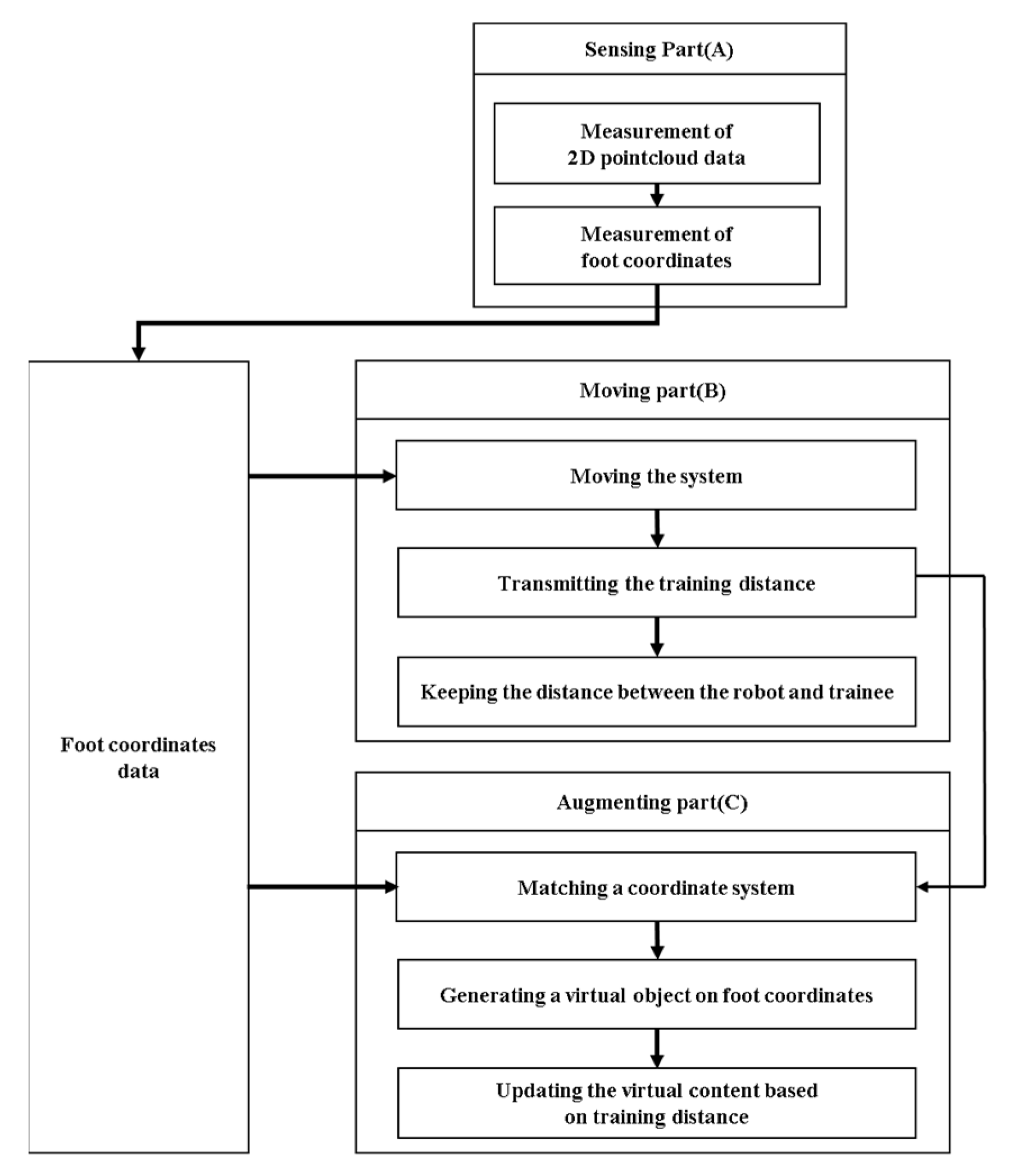
2. Proposed System
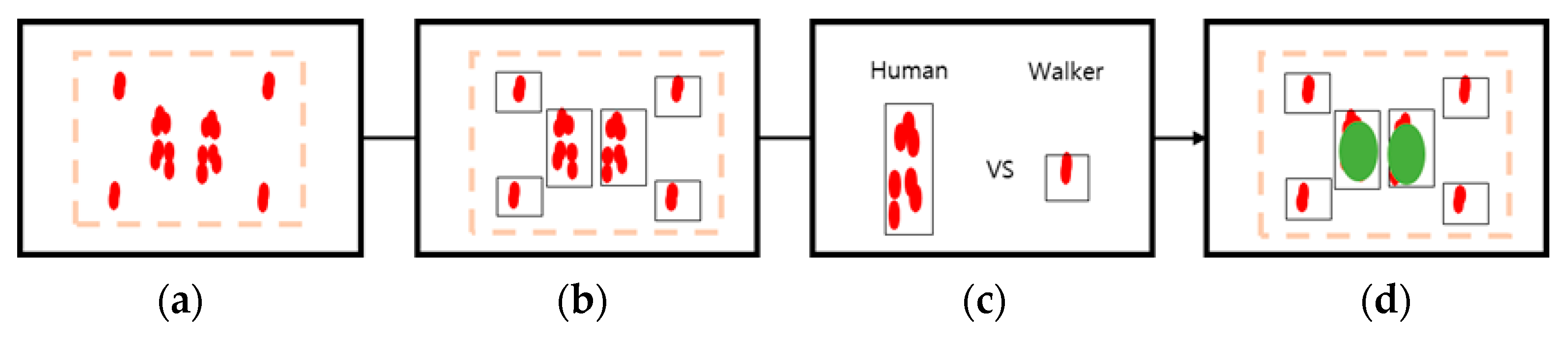
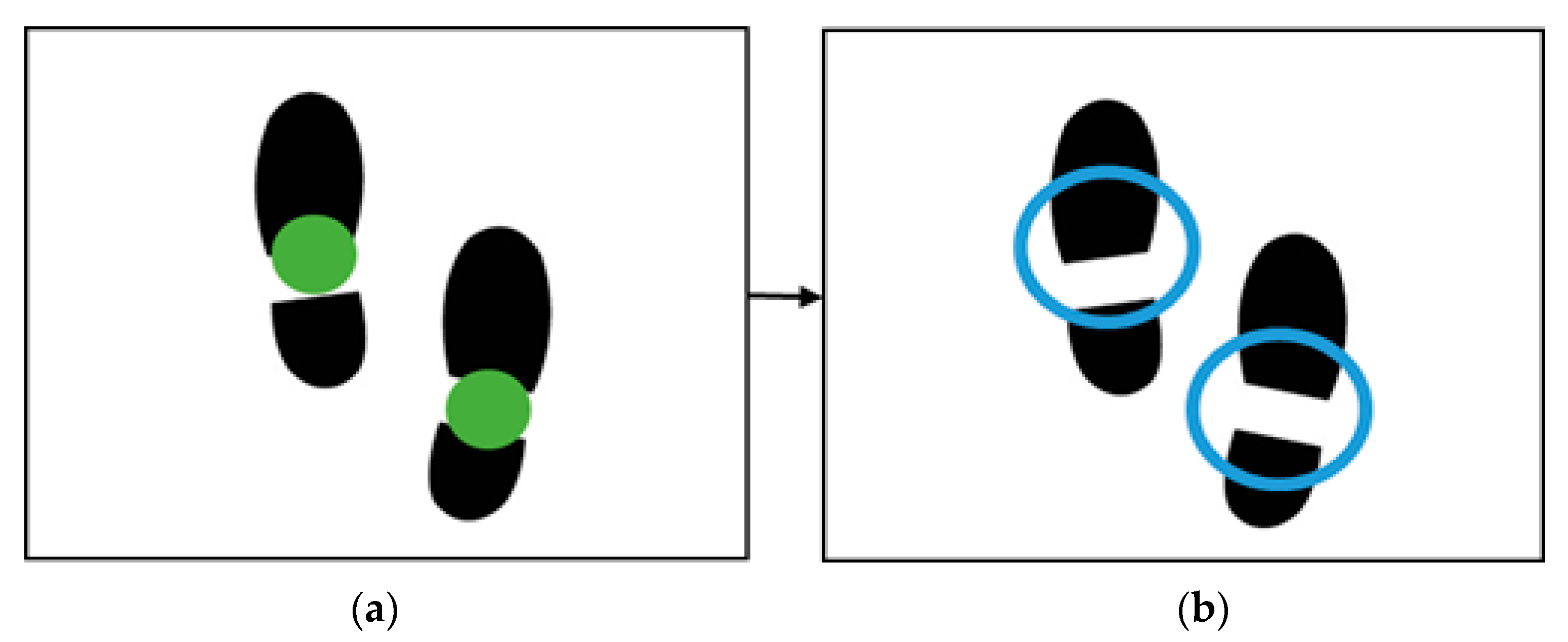
2.1. Sensing Part
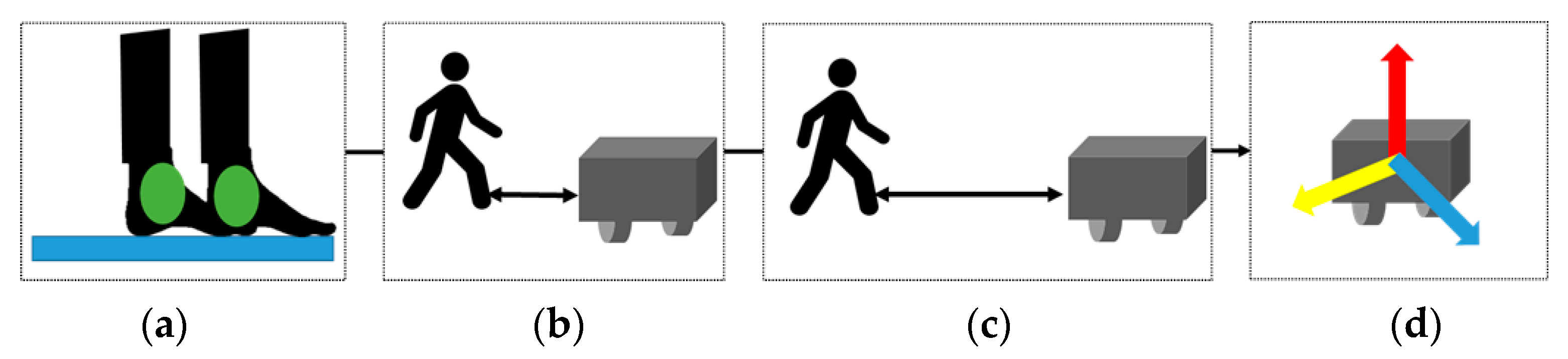
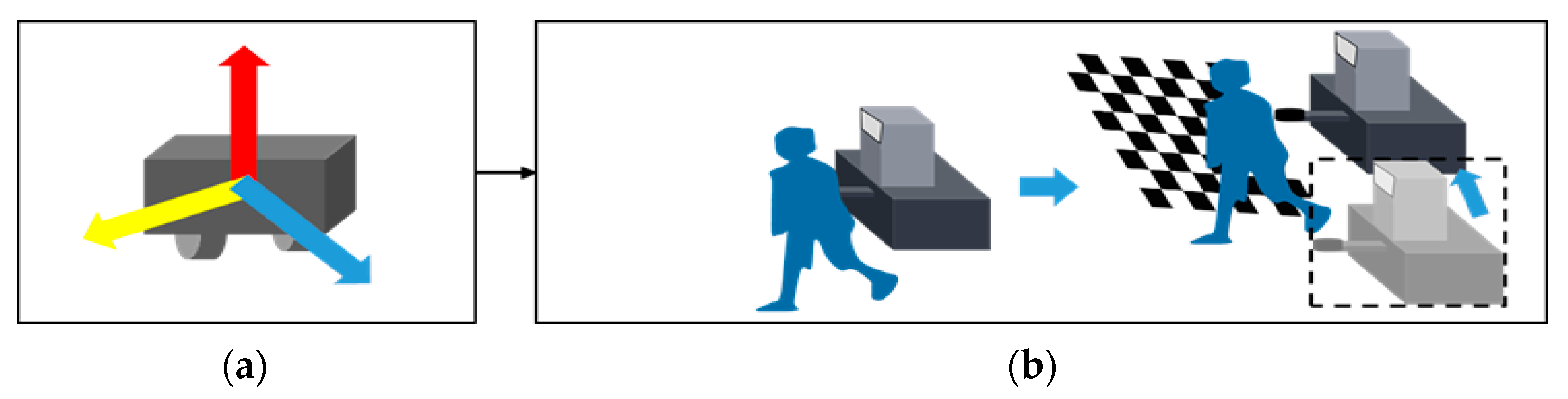
2.2. Moving Part
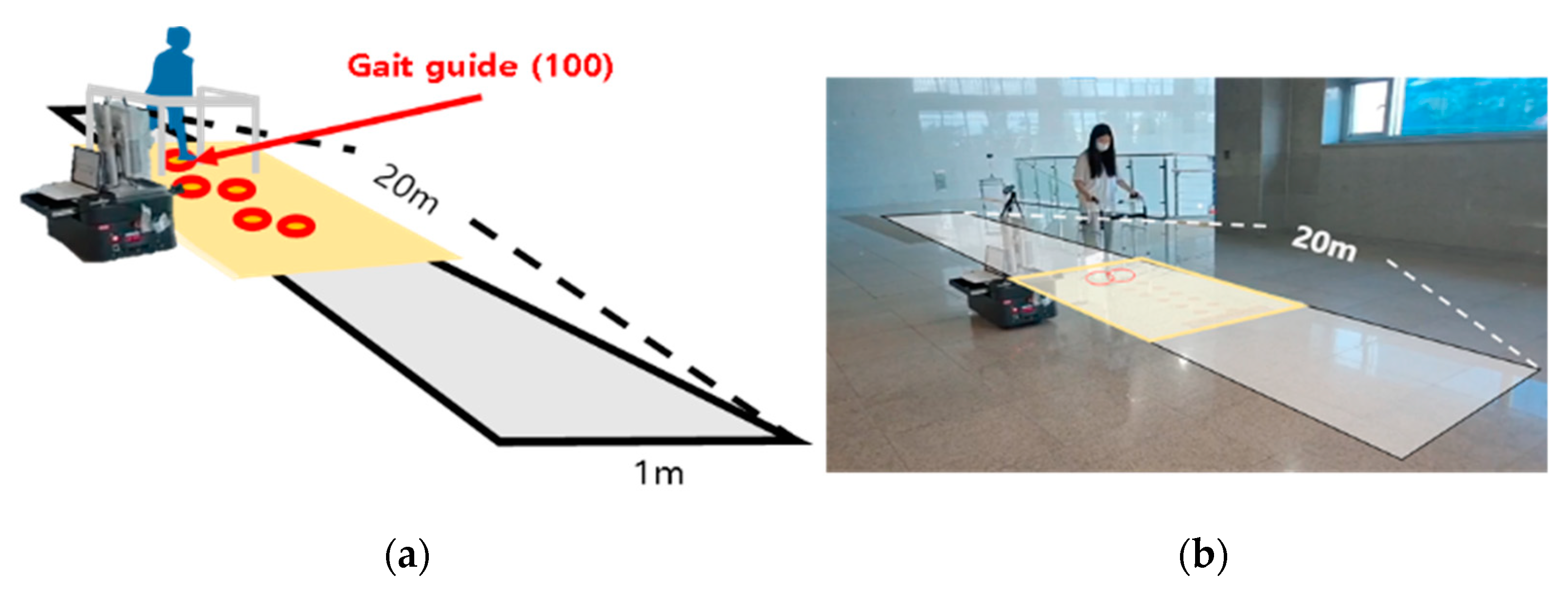
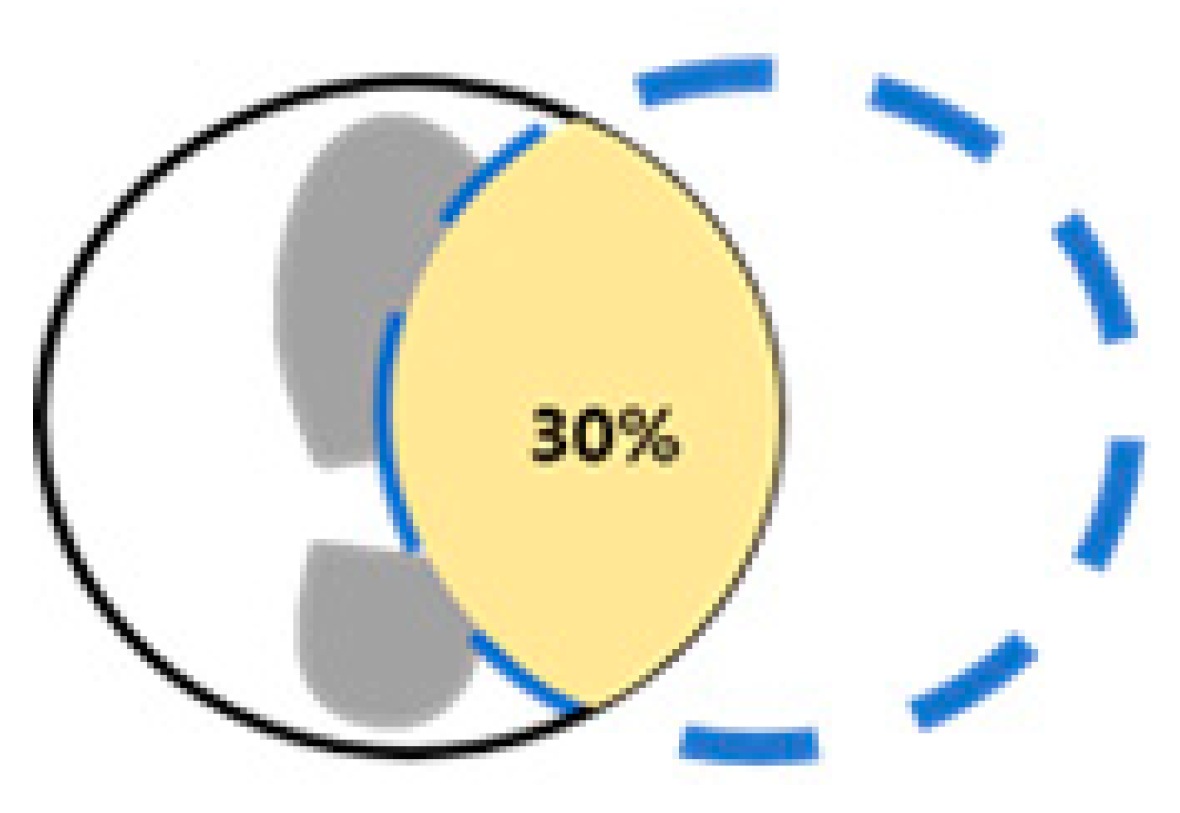
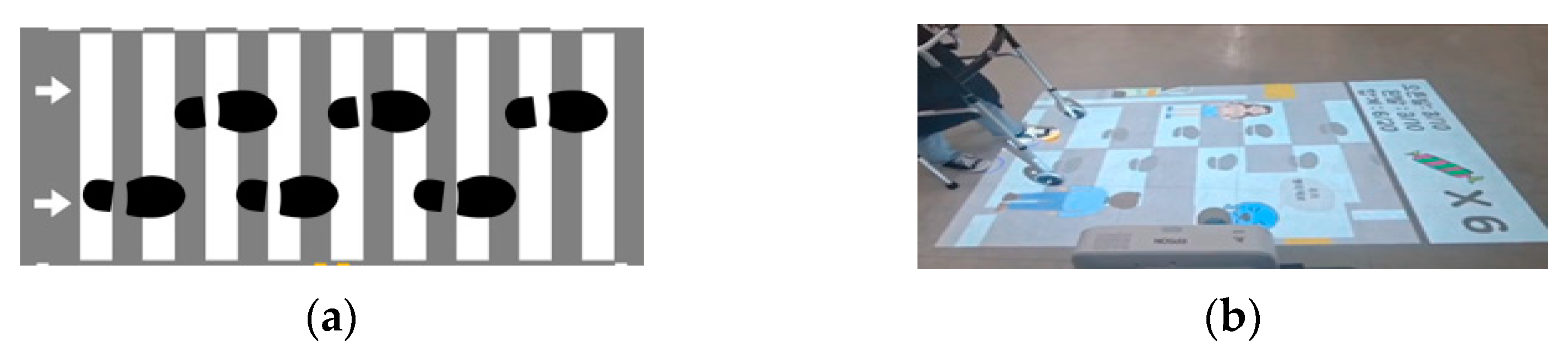
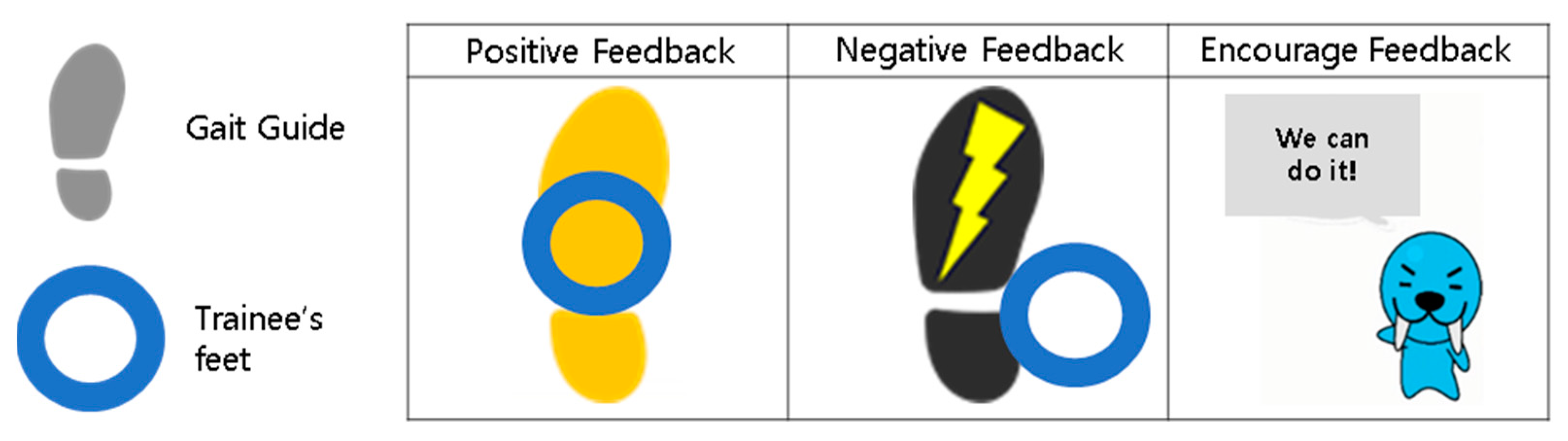
2.3. Augmentng Part
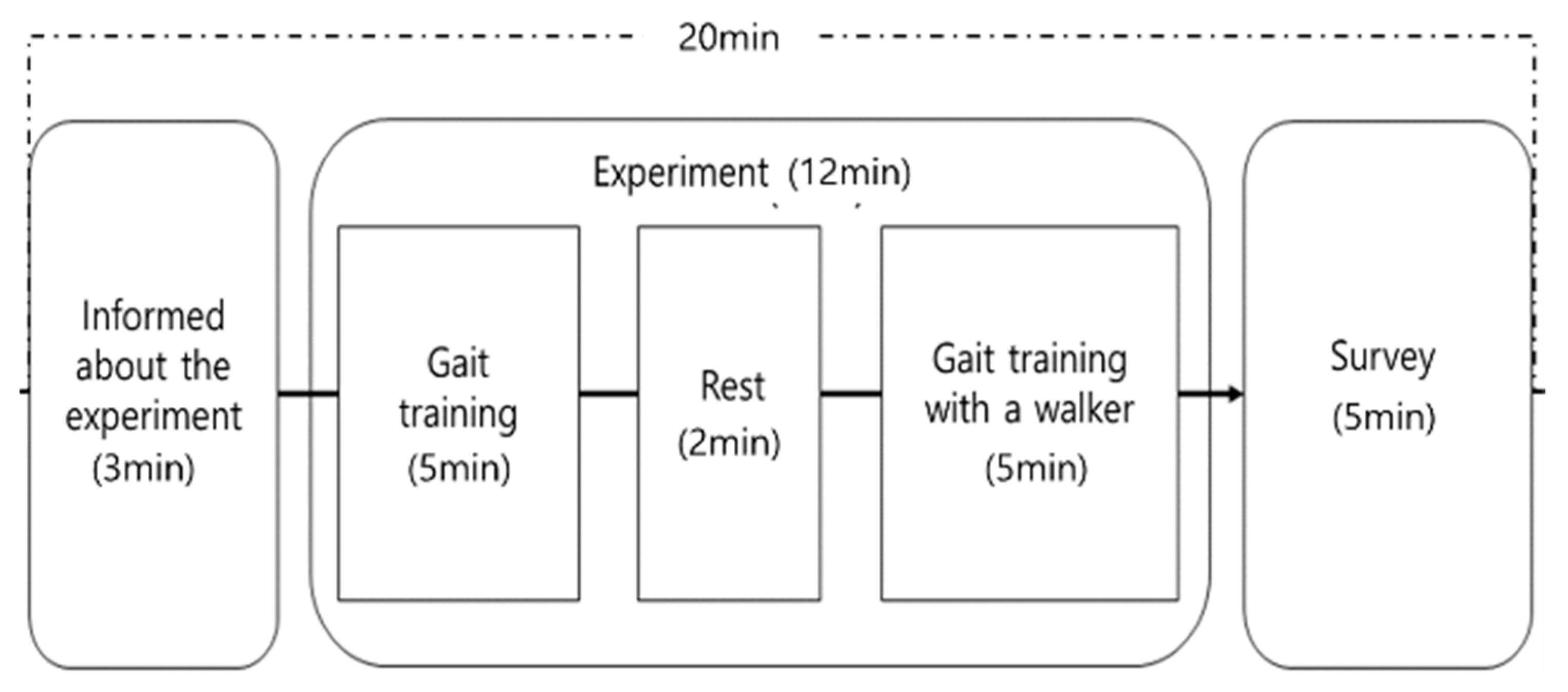
3. Experiment
3.1. Experimental Environment
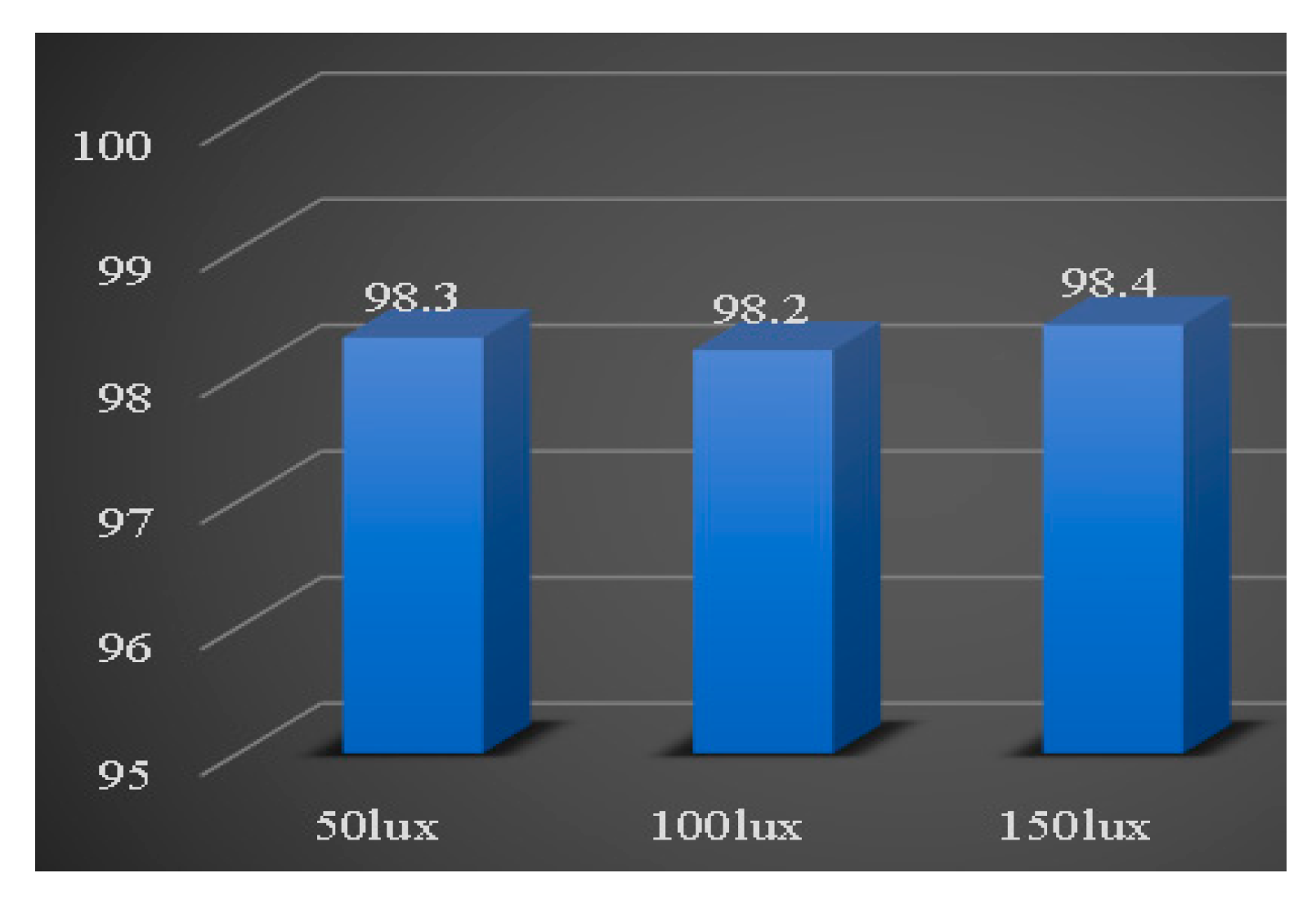
3.1.1. Experiment 1: An Experiment for Foot Recognition
3.1.2. Experiment 2: Usability Evaluation
3.2. Experimental Results
3.2.1. Result of Foot Recognition Experiment
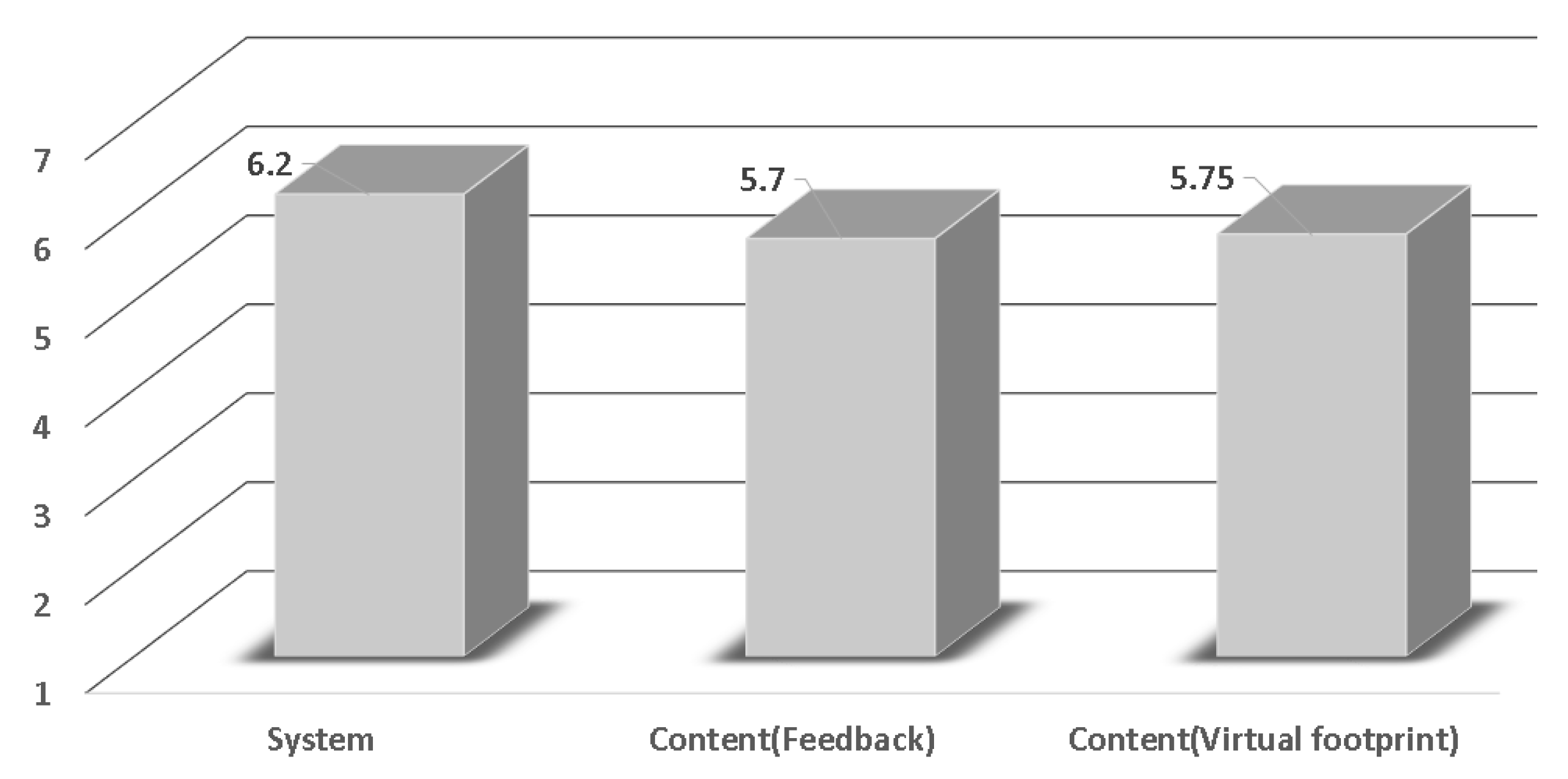
3.2.2. Result of the Usability Evaluation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Prange, G.B.; Jannink, M.J.; Groothuis-Oudshoorn, C.G.; Hermens, H.J.; IJzerman, M.J. Systematic review of the effect of robot-aided therapy on recovery of the hemiparetic arm after stroke. J. Rehabil. Res. Dev. 2006, 43, 171–184. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Woodson, C.; Bandy, W.D.; Curis, D.; Baldwin, D. Relationship of Isokinetic Peak Torque With Work and Power for Ankle Plantar Flexion and Dorsiflexion. J. Orthop. Sports Phys. Ther. 1995, 87, 113–115. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.-R.; Tsai, M.-P.; Chuang, T.-Y.; Sung, W.-H.; Wang, R.-Y. Virtual reality-based training improves community ambulation in individuals with stroke: A randomized controlled trial. Gait Posture 2008, 28, 201–206. [Google Scholar] [CrossRef] [PubMed]
- Lord, S.E.; Rochester, L.; Weatherall, M.; McPherson, K.M.; McNaughton, H.K. The Effect of Environment and Task on Gait Parameters After Stroke: A Randomized Comparison of Measurement Conditions. Arch. Phys. Med. Rehabil. 2006, 87, 967–973. [Google Scholar] [CrossRef] [PubMed]
- Combs-Miller, S.A.; Parameswaran, A.K.; Colburn, D.; Ertel, T.; Harmeyer, A.; Tucker, L.; Schmid, A. Body weight-supported treadmill training vs. overground walking training for persons with chronic stroke: A pilot randomized controlled trial. Clin. Rehabil. 2014, 28, 873–884. [Google Scholar] [CrossRef] [PubMed]
- Mikolajczyk, T.; Ciobanu, I.; Badea, D.I.; Iliescu, A.; Pizzamiglio, S.; Schauer, T.; Seel, T.; Seiciu, P.L.; Turner, D.L.; Berteanu, M. Advanced technology for gait rehabilitation: An overview. Adv. Mech. Eng. 2018, 10, 1687814018783627. [Google Scholar] [CrossRef]
- Beretta, E.; Romei, M.; Molteni, E.; Avantaggiato, P.; Strazzer, S. Combined robotic-aided gait training and physical therapy improve functional abilities and hip kinematics during gait in children and adolescents with acquired brain injury. Brain Inj. 2015, 29, 955–962. [Google Scholar] [CrossRef] [PubMed]
- Martini, E.; Crea, S.; Parri, A.; Bastiani, L.; Faraguna, U.; McKinney, Z.; Molino-Lova, R.; Pratali, L.; Vitiello, N. Gait training using a robotic hip exoskeleton improves metabolic gait efficiency in the elderly. Sci. Rep. 2019, 9, 7157. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fernández-Del-Olmo, M.A.; Sanchez, J.A.; Bello, O.; Lopez-Alonso, V.; Márquez, G.; Morenilla, L.; Castro, X.; Giraldez, M.; Santos-García, D. Treadmill training improves overground walking economy in Parkinson’s disease: A randomized, controlled pilot study. Front. Neurol. 2014, 5, 191. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hesse, S.; Werner, C.; Bardeleben, A.; Barbeau, H. Body weight-supported treadmill training after stroke. Curr. Atheroscler. Rep. 2001, 3, 287–294. [Google Scholar] [CrossRef] [PubMed]
- Jezernik, S.; Colombo, G.; Keller, T.; Frueh, H.; Morari, M. Robotic Orthosis Lokomat: A Rehabilitation and Research Tool. Neuromodulation Technol. Neural Interface 2003, 6, 108–115. [Google Scholar] [CrossRef] [PubMed]
- Casuso-Holgado, M.J.; Martín-Valero, R.; Carazo, A.F.; Medrano-Sánchez, E.M.; Cortés-Vega, M.D.; Bancalero, F.J.M. Effectiveness of virtual reality training for balance and gait rehabilitation in people with multiple sclerosis: A systematic review and meta-analysis. Clin. Rehabil. 2018, 32, 1220–1234. [Google Scholar] [CrossRef] [PubMed]
- Held, J.; Ferrer, B.; Mainetti, R.; Steblin, A.; Hertler, B.; Moreno-Conde, A.; Dueñas, A.; Pajaro, M.; Parra-Calderón, C.; Vargiu, E.; et al. Autonomous rehabilitation at stroke patients home for balance and gait: Safety, usability and compliance of a virtual reality system. Eur. J. Phys. Rehabil. Med. 2018, 54, 545–553. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.; Park, C.; You, J.H. Effects of Robotic Interactive Gait Training on Cognitive and Locomotor Function in Post-Stroke Dementia. Arch. Phys. Med. Rehabil. 2022, 103, e32. [Google Scholar] [CrossRef]
- Kim, Y.; Park, C.; You, J.H. Effects of Robotic Interactive Gait Training Combined with Virtual Reality and Augmented Reality on Balance, Gross Motor Function, Gait Kinetic, and Kinematic Characteristics in Angelman Syndrome: A Case Report. Children 2022, 9, 544. [Google Scholar]
- de Rooij, I.J.M.; van de Port, I.G.L.; Punt, M.; Abbink-van Moorsel, P.J.M.; Kortsmit, M.; van Eijk, R.P.A.; Visser-Meily, J.M.A.; Meijer, J.-W.G. Effect of Virtual Reality Gait Training on Participation in Survivors of Subacute Stroke: A Randomized Controlled Trial. Phys. Ther. 2021, 101, pzab051. [Google Scholar] [CrossRef] [PubMed]
- Available online: https://www.hocoma.com/solutions/lokomat/ (accessed on 5 December 2022).
- Available online: http://walkbot.co.kr/introduction/ (accessed on 5 December 2022).
- Available online: https://www.rehatechnology.com/en/g-eos/ (accessed on 5 December 2022).
- Available online: https://www.hpcosmos.com/en/robowalk-expander-b-15050 (accessed on 5 December 2022).
- Available online: https://www.noraxon.com/our-products/rehawalk-pressure-treadmill/ (accessed on 5 December 2022).
- Lee, R.-B.; Won, J.-H.; Jang, S.-W.; Kweon, H.; Kim, H.K.; Kim, Y.S. An AR-based mobile robot system for gait training. Turk. Online J. Qual. Inq. 2021, 12, 1117–1123. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attributes | Lokomat [17] | Walkbot [18] | G-EO [19] | Robowalk [20] | Rehawalk [21] | Proposed System1 [22] (80%) | Proposed System2 (98%) |
|---|---|---|---|---|---|---|---|
| Immersion | O | O | O | O | O | O | O |
| Activation | X | X | X | X | X | O | O |
| No | Questionnaire | Answer Negative ↔ Positive | ||
|---|---|---|---|---|
| System | 1 | Gait training system maintained a certain distance | 1-2-3-4-5-6-7 | |
| 2 | The speed of movement of the system was appropriate | 1-2-3-4-5-6-7 | ||
| 3 | System was safe | 1-2-3-4-5-6-7 | ||
| Content | Feedback | 4 | Positive feedback helped improve the trainee’s sense of accomplishment | 1-2-3-4-5-6-7 |
| 5 | Negative feedback helped correct a trainee’s misguided gait | 1-2-3-4-5-6-7 | ||
| 6 | Encouraging feedback allowed the trainee to carry out the gait training to the end | 1-2-3-4-5-6-7 | ||
| Virtual footprints | 7 | The gait guide spacing of the gait training system was appropriate | 1-2-3-4-5-6-7 | |
| 8 | The size of the virtual footprints projected onto the ground by system was appropriate | 1-2-3-4-5-6-7 | ||
| Variable | Value |
|---|---|
| H | 0.635 |
| Df | 0.635 |
| p-value | 0.727 |
| Variable | Value |
|---|---|
| H | 3.21 |
| Df | 2 |
| p-value | 0.2 |
| Variable | AVG | SD | SE |
|---|---|---|---|
| Q1 | 83.375 | 19.912 | 7.04 |
| Q2 | 85.4125 | 13.89 | 4.91 |
| Q3 | 93.75 | 12.39 | 4.38 |
| Q4 | 89.5875 | 19.79 | 6.99 |
| Q5 | 81.2375 | 16.51 | 5.83 |
| Q6 | 83.325 | 26.73 | 9.45 |
| Q7 | 87.5 | 14.76 | 5.21 |
| Q8 | 85.4125 | 18.76 | 6.63 |
| All | 86.19 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, R.-B.; Lee, Y.S.; Kweon, H.; Kim, H.K.; Kim, Y.S. A Mobile Gait Training System Providing an Active Interaction. Appl. Sci. 2023, 13, 580. https://doi.org/10.3390/app13010580
Lee R-B, Lee YS, Kweon H, Kim HK, Kim YS. A Mobile Gait Training System Providing an Active Interaction. Applied Sciences. 2023; 13(1):580. https://doi.org/10.3390/app13010580
Chicago/Turabian StyleLee, Ro-Bin, Young Seung Lee, Hyosun Kweon, Hyun Kyung Kim, and Yoon Sang Kim. 2023. "A Mobile Gait Training System Providing an Active Interaction" Applied Sciences 13, no. 1: 580. https://doi.org/10.3390/app13010580