
A Proposal for Decentralized and Secured Data Collection from Unmanned Aerial Vehicles in Livestock Monitoring with Blockchain and IPFS

 , and
, and
Abstract
:Featured Application
Abstract
1. Introduction
1.1. Contributions of the Paper
- A study on the State of the Art regarding the existing solutions for UAV usage in livestock monitoring oriented to Smart Farming. In this way, not only a collection of related works about this topic has been made available, but also the main open issues that have been found are present as well.
- A specific list of requirements, both for hardware and software components, with regard to how to deploy a UAV in a secure manner whenever it is needed to do so. Therefore, UAVs can either be built from scratch with the specific purpose of cattle monitoring or purchased with the requirements needed to perform monitoring and surveying missions satisfactorily. It must be born in mind that there are several aspects like communications bandwidth, operational distance or data transmission rates that have to be specified for the better performance of a UAV in this application domain.
- A security threat analysis on how to create a secure framework for UAV livestock monitoring applications. As mentioned, cybersecurity must be considered from the very beginning when deploying a system in the application domain of Smart Farming. Combining the security analysis with the requirements one, an accurate and effective livestock monitoring UAV can be developed.
- An actual implementation and testing of the proposed framework under the formulated UAV requirements. Thus, the theoretical concepts that are described previously can be put to practice and assessed under a real-world scenario. Not only hardware components for the UAV have been considered, but also the software components (blockchain, IPFS) and protocols (TLS, HTTPS) that are decisively assisting the security capabilities.
1.2. Paper Structure
2. Related Works
2.1. Study of the State of the Art
2.2. Open Issues
- Lack of focus on cybersecurity implementation. Security features usually come as an afterthought rather than having them embedded in the development of the solution from the very beginning. In most of cases of the reviewed literature they are given negligible importance, whereas in some others cybersecurity is nonexistent as a feature. This might create major issues when monitoring cattle or performing Smart Farming activities, as the collected data can be tampered with easily, whereas other pieces of information (what kind of protocols must be used for data transmission, which components are vulnerable to cyberattacks, etc.) are missing.
- Lack of UAV tailoring for the purpose of cattle monitoring. Rather than having one or a collection of UAVs specifically prepared for the purpose of monitoring cattle (something that demands specific components that can be used for data transmission, UAV control or information security) commercial models have been used for the most part to perform the missions. While this might work in some cases, there are others where, due to the communications range or the information flows, using purely multi-purpose commercial UAVs might present issues that could limit the usefulness of such solution.
- Lack of description in hardware and software component interweaving and integration. Partially because of the previous open issue, most of the components used in the deployments performed are taken for granted and there is very limited research on how to build hardware and software parts with the specific purpose of cattle monitoring adapted to the actual needs of farmers. In addition to that, cybersecurity features are still largely missing.
- A thorough study on the requirements to build such a solution is performed. This has been done according to questions asked to farm staff regarding their own specific needs in cattle monitoring, how they can be solved with the use of UAVs and what has been studied in the State of the Art.
- Usage of cybersecurity components whenever there is a need for data transmissions so that efforts to exploit weaknesses become futile.
- Implementation and testing of a UAV-based tool that will meet all the requirements and security characteristics that must be integrated in the system.
3. Prototype Description and Implementation
- Cybersecurity implementations. In most of the reviewed proposals cybersecurity has not been considered as a serious requirement at any stage of the development, even when sensitive information about living beings or locations was collected. Our proposal integrates specific security solutions derived from the components that have been chosen to build the required subsystems and how they have been integrated.
- Tailored development. Many of the proposals that have been described do not consider the specific needs of the environment of smart farming (distances from one place to another, easiness to repair damaged components, First Person View or FPV of cattle, enhanced radio control subsystem, etc.). As it will be explained in further sections of the paper, the subsystems that our proposal consists of are built according to the feedback obtained by farmers that work with sheep and the foodstuffs derived from them, so the proposed system is also making use of the information obtained from experts in this area of knowledge.
- Subsystems built for integration. In most of the reviewed proposals, there is no clear information of the components used to build the UAV (partially since most of them offer commercial, closed solutions from manufacturers) or any other systems that are used in a supportive role. We have described not only such subsystems, but also have explained each of the components used to build them internally, so the technological foundations of the presented CPS are crystal clear.
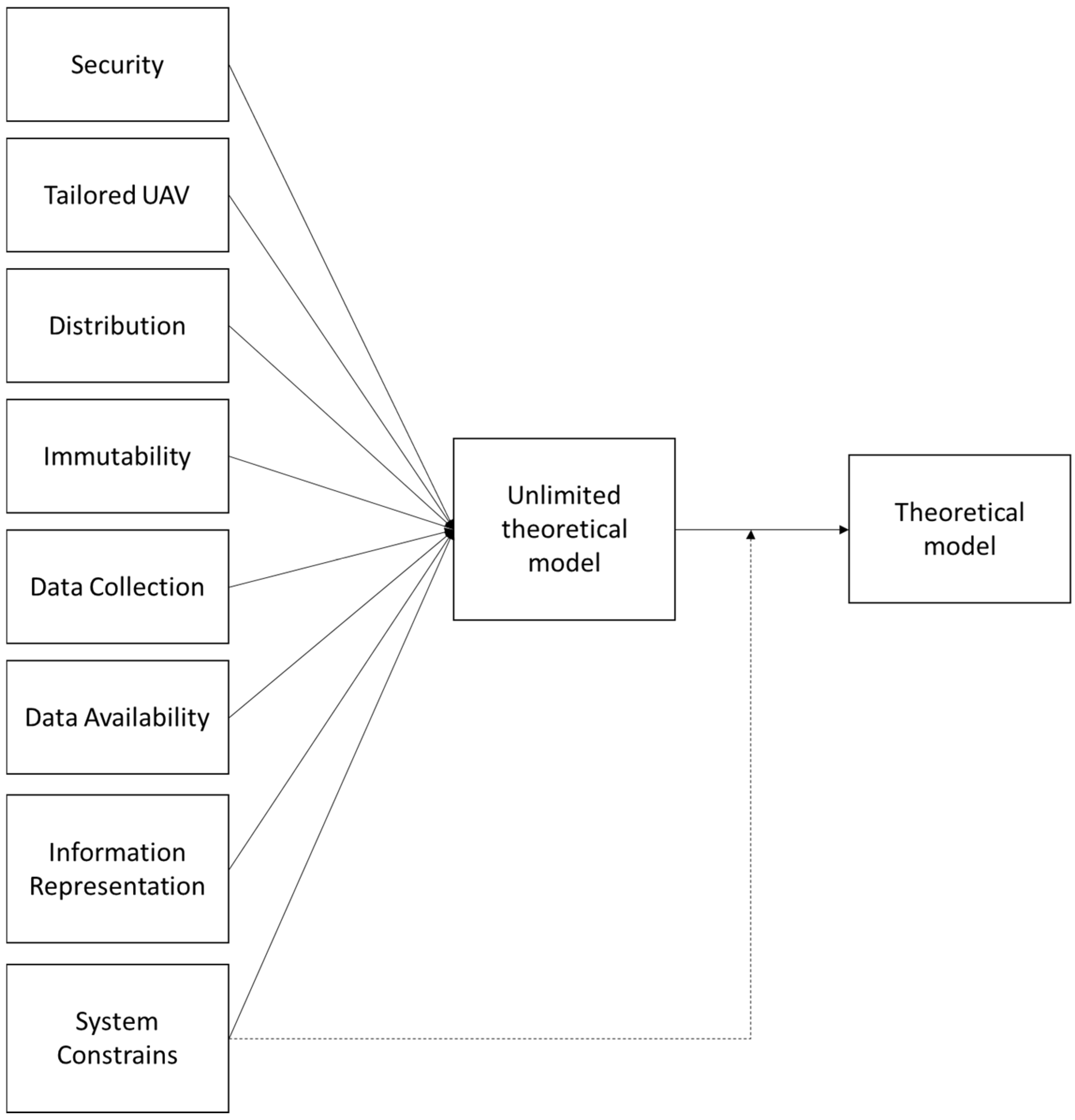
3.1. Theoretical Model for the Proposal
- Security. The system should be secured, and security should be at the center of its conception from the beginning.
- Tailored UAV. The usage of a specific UAV that can face the required needs of the application domain has to be considered.
- Distribution. The system must have some degree of distribution to ensure that information is not kept in a single, centralized location that might be more vulnerable to cyberattacks.
- Immutability. Data that have been obtained from the monitoring of animals and other usages must not be altered once they have been saved and shared throughout the system.
- Data collection. The system will collect data from the activities it is performing for information further analysis.
- Data availability. The data that have been collected should be available even in case the location saving them has any issue guaranteeing that they can be offered at any time.
- Information representation. The information that has been collected should be visible for any party interested in the system.
- System constrains. The system developed for the purpose of this manuscript should consider several constrains related to the budget and usability of the system (both of them must be reasonable).
- The theoretical model has significance: it is strictly related to the application domain where the presented theoretical model has a purpose.
- It has internal consistency: it does not fall into contradictions related to components, their interactions, or their requirements, even during the implementation and testing stages.
- The model offers parsimony: the components used can be justified from a functional and non-functional requirements point of view and it can be easily explained what kinds of components have been used and their purpose.
- It makes testability possible: it has been involved in building a prototype that has been tested throughout several experiments.
- The theoretical model has empirical adequacy: it considers principles in the performance of the UAV and data sharing that exist outside the phenomenon the model describes, such as gravity and time delays in data transfers.
- It has pragmatic adequacy: it is useful to solve problems that have been found as part of practical works, as it is reflected on the advantages that the proposed system offers compared to the existing literature.
3.2. Requirement Analysis
- Security is a must in the UAV. The components that make the UAV should have as many security features as needed, so that its usage will not result into any kind of cyberattack becoming successful and either luring the UAV away from their owners or damaging the hardware components used for its normal operating. This makes the idea of building a UAV from scratch more attractive, as it is possible to have a better knowledge of the security embedded in each of the components.
- Security is a must in the deployed subsystems. Not only the UAV must be secured, but also the infrastructure used to secure the data delivery and transfer. To accomplish this purpose, there are several actions that can be taken: to begin with, the data storage infrastructure can become decentralized, so that it becomes obvious when one of the parties is trying to modify the data with malicious intentions. With such an infrastructure, integrity of the information uploaded (images, video) can be guaranteed and farmers can display the location and characteristics of the livestock whenever they are grazing, along with identifying potential predators o rother threats.
- Range for monitoring. Wireless communication protocols have features related to signal power, range and data transmission, which also impose restrictions on what power a UAV needs to perform its functionalities and might come in conflict with using a UAV as simple as possible. Using a UAV with limited capabilities for the purpose shown in this manuscript might be desirable due to two reasons: budget (a simpler, more basic UAV will be cheaper to deploy and will required not too skilled workforce) and legislation (current legislation might be too restrictive for small or medium-small UAVs, but more lenient on smaller UAVs, which will make them easier and faster to use in the latter case).
- Mission autonomy. Energy for UAV movements and communications is drawn from a built-in battery that requires being recharged before it comes to depletion. With not enough battery energy, the UAV purpose might become jeopardized if flight autonomy is too small, thus forcing to either having a recharging infrastructure in the location where monitoring is taking place, or to make short-timed monitoring missions that might miss some of the animal actions.
- Closed, regular commercial solutions are harder to fix in the countryside. While already built solutions are easier to maneuver as a UAV pilot and offer a level of quality that more oriented Do-It-Yourself developments cannot compete with, its closed nature makes it more difficult to repair in case the UAV results damaged from operating with it. It must be born in mind that livestock monitoring might take place in remote locations (as it has been reviewed in the literature shown in the previous section), so having to take the UAV to an official maintenance service branch might be challenging for the kind of missions that are performed. This, in turn, will likely force farmers to own more than one UAV as a closed solution, thus resulting in extra budgetary needs. Building a UAV from scratch solves that issue to an extent, as there are others related to security and legislation that might appear.
- Animal behaviour can be challenging. Due to the behaviour of animals when monitored with an alien, unknown element that seems to behave in an unsettling manner (high-pitched noises, hovering), livestock tends to become uneasy and even frightened around UAVs at first, to become indifferent once they have adapted to the UAV presence afterwards. This might result in behaviour issues when having cattle coexisting with the UAV, as they could behave in unwanted manners either if they are being monitored or the UAV is being used to guide them to a specific point.
- Legislation effectively encourages simpler UAVs. Legislation tends to be restrictive for end users to utilize UAVs, especially when these are large or complex, so simpler models that adapt poorly to the purpose described in this manuscript might be used instead. This pattern might create challenges for UAV utilization even in open, non-inhabited areas, especially if a tailored one is built, as its features might be mixed between more than one UAV class.
- Information sharing procedures must be enhanced for the purpose of creating a secure, reliable system. If the data provided by the UAV is to be shared among interested parties with the idea of providing all the information in a transparent manner, procedures and tools used from the point of view of data sharing must be an improvement over what is used in the reviewed literature.
- Using UAVs would provide an advantage for workers in agricultural exploitations as far as livestock monitoring is concerned. Specifically, it would allow farm workers to disengage partially or completely from activities like (a) cattle monitoring to check whether animals are in a suitable position for grazing and away from predators or hunting grounds, (b) cattle guidance towards specific locations where livestock can be kept in safe locations and (c) information gathering about individual animals with conditions that make them special (pregnancies, wounds, etc.). This would enable farm workers to perform other tasks (facilities maintenance, indoor animals cleaning and preparation, etc.) while the UAV is taking care of livestock outside.
- UAV flight capabilities would come in extremely handy when the livestock is away from the place where farm workers would be performing other tasks (not only in farm installations but also on the countryside), as UAVs can negate any irregularity or difficulty on the terrain where cattle is and can fly at a steady pace that often outruns ground vehicles like automobiles or vans, which can move fast but are dependent on ground accessibility, gravel and/or dirt roads and previously existing paths to get to their destination.
- Information security was a matter of interest, since videos and images collected can be used to prove that animals have been well treated, have grazed in good conditions and their general well-being is compliant with the currently enforced legislation. The technology behind it was overall nonimportant for the farm staff, although there was a degree of curiosity about it. Likewise, the possibility of reliably sharing information with parties that will provide any kind of benefit or perk (good practices certification, assurance of premium quality in agricultural output) is considered a desirable feature as well.
- While UAV autonomy is a major concern, it is not as critical as to become a deal breaker for the usage of such autonomous vehicles. Several examples were described, and it was claimed by the farm staff interviewed that a total of 5–6 min was required to conduct a herd of sheep from their grazing location back to a sheepfold in the premises that were used for testing the solution. In that case and similar ones, a flight autonomy of 15 or more minutes should be sufficient to perform missions in a reliable manner.
- UAV maneuverability was strongly regarded as a necessary feature since it is required to counter sudden strokes of wind or any condition that would send the UAV in a control loss state. Sturdiness (for short-term damage) and durability (for long-term one) were also positively evaluated.
- An emergency stop feature was desirable, as it would allow to immediately stop any misbehavior that the UAV might experience. This is a characteristic that is included in the overwhelming majority of commercial and built-in UAVS, so applying it to this application domain does not represent a problem.
- Bad weather conditions are mentioned as a major limitation of the proposed system. While testing and deployment of the whole proposed solution was done in a Spanish location with temperate and not too rainy climate (and in this context, UAVs can be used during a wide range of days), it might not be the case in other locations.
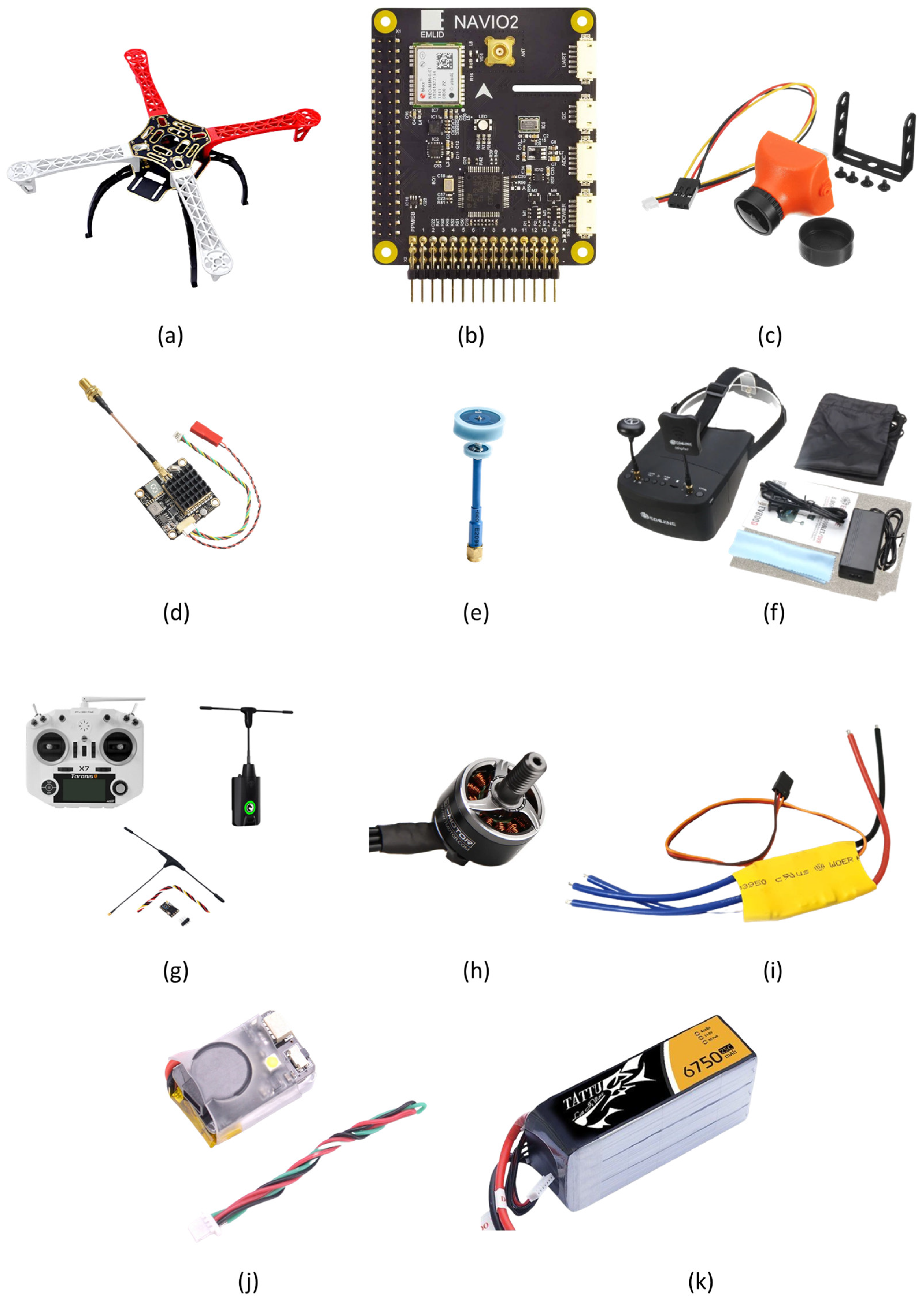
3.3. Prototyping of Hardware Components
- Frame F450 [28]: this frame is one of the most popular in UAV prototyping. Its main advantages are its light weight, its resistance to impacts and its ease of repair, which are of great usefulness for the application domain formulated in this paper. Furthermore, its size makes it a suitable option for assembling modular UAVs since it has more than enough room for the integration of many components. The material from which it is made of is reinforced plastic and its low cost are added values that make it the best option.
- Navio2 controller [29]: the flight controller is the component in charge of ensuring that all the other ones that make up the UAV will work properly. Together with the Raspberry Pi 3B [30] on which it is integrated, the controller governs the modular systems integrated in the aircraft (that is to say, autonomous stabilization, GNSS navigation, flight by waypoints or displacement points, failsafe systems or rear door for greater security, camera control, UAV manual control functions). The Raspberry Pi 3B is also an extremely useful tool for hardware integration, as it offers several interfaces (four Universal Serial Bus -USB- ports, one High-Definition Multimedia Interface -HDMI- interface and, more importantly, a 40-pin extended General Purpose Input/Output) that can be used to connect any hardware component required. Overall, the flight controller used offers a series of features that come in handy for the purpose of this demonstrator. The Global Navigation Satellite System (GNSS) receiver provided by Navio2 is compatible with various positioning systems, such as the American GPS [31], Russian GLONASS [32] and European Galileo [33]. One of the reasons why this controller was selected is that its GPS chip is compatible with the GNSS European civil positioning system. As far as the purpose of this system proposal is concerned, Galileo offers several advantages: it is a free and open service, it offers greater positioning accuracy (explicitly described as Galileo High Accuracy Service or HAS [34]) and, more importantly for the purpose of this manuscript, it offers a higher level of security for data encryption that are not present in the other GPS solutions. Galileo also offers a high precision, fully encrypted service freely available for government-authorized users [35], which is equivalent to the one that GPS offers as military P(Y) or M code.
- Video transmission subsystem: the designed aircraft has an integrated analog video system that offers the operator a first-person view of the drone’s flight (which is referred to as First Person View or FPV). This feature will provide the pilot with a precise view of the UAV state at every moment of the mission that is taking place. For the implementation of this system, a series of hardware components are required. As mentioned, an analog video camera is needed, which is integrated on board the UAV and provides images with enough quality for the operator so that they can orient themselves on the terrain over which the UAV is flying. Additionally, an analog video transmitter is required, which receives the signal captured by the camera and transmits it to the ground base station that has a receiver synchronized with the transmitter and connected to a screen. Due to the importance of this subsystem, it has been further divided onto four different hardware components:
- FPV camera (25 × 25 mm 1200TVL CMOS 3.6 mm) [36]: the FPV camera is a small analog video camera placed on the UAV. Its main function is to offer the pilot a real-time image of the position and the environment where the aircraft is located. The video quality must be good enough to allow the operator to maneuver with and steer the vehicle. This component is directly connected to the video transmitter through a bus that feeds the component with power and in turn transmits the signal of the captured image.
- Video Transmitter AKK-FX2-Dominator 250 mW [37]: it is a component responsible for transmitting the signal it receives from the FPV camera to the receiving CGS. This video transmitter must broadcast a signal with enough power to be received within the radius of action of the flight plan, thus preventing the operator from losing visual reference to the position of the vehicle. Due to the nature of the proposed system, a long-range analog video transmitter has been chosen (the distances handled in the grazing and monitoring of sheep must be considered here). Specifically, this video transmitter offers a range slightly greater than four kilometers as long as it is used with omnidirectional antennas. Taking into account its characteristics and the fact that the area where it will be used does not have major obstacles that could cause interference, it becomes rather suitable for the purpose of this manuscript. Since it is transmitting significant amounts of data, this component will heat up considerably, so it should be placed in a space where it is ventilated during the flight. This video transmitter works combined with the antenna that will be described in the next subsection, due to the need to transfer the collected images to the module expected to send the data out of the UAV. As it will be explained later, both this video transmitter and the antenna it works with make use of the 802.11 ac wireless standard that transmits data at 5.8 GHz.
- VTX Antenna AKK 5dBi 5.8 GHz FPV [38]: this antenna is a component connected to the video transmitter. Its main function is the conversion of the electrical waves of the video signal into electromagnetic waves that the ground station will receive. In this case, an omnidirectional antenna with Right Hand Circular Polarization (RHCP) has been used, which implies that the receiver of the CGS must have an antenna polarized in the same way. An omnidirectional antenna will be used because it is the one that offers the greatest range for the transmission of video signals and therefore allows the operator to take the aircraft further from the ground station. For the usage of the 5.8 GHz band, the standard 802.11 ac has been used, which offers better security capabilities than other transmission systems due to including support for 256 bit AES keys and the Galois Counter Mode Protocol (GCMP) encryption protocol, which is more efficient and performs better when compared to Counter Mode with Cipher Block Chaining Message Authentication Code Protocol (CCMP). In addition to that, a) the 5 GHz band is much less cluttered with traffic than the 2.4 GHz one, so data transmissions are more efficient and easier to deal with and b) Protocol Data Units (PDUs) have been further optimized (according to the Amendment 4 of the standard [39] “CCMP-128 processing expands the original MPDU size by 16 octets, 8 octets for the CCMP Header field and 8 octets for the MIC field. CCMP-256 processing expands the original MPDU size by 24 octets, 8 octets for the CCMP Header field, and 16 octets for the MIC field.”).
- FPV goggles (Eachine EV800D) [40]: FPV goggles integrate several components that allow the operator to have visual information about what can be watched from the position of the UAV. Firstly, they incorporate a receiver for the video signal transmitted by it. This receiver transforms the received electromagnetic signal into an analog video signal. Furthermore, this model of glasses uses a 5.8 GHz diversity receiver (this means that it incorporates two types of antennas: one linear and one omnidirectional, polarized in the same direction as the video transmitter antenna that is on board the UAV). Receiver diversity technology is developed to minimize the effect of multipath cancellation and extend the useful operating range of the system. The receiver can tune up to 40 channels to avoid interference with the signal from other vehicles transmitting data. Adding to the video receiver, the glasses also incorporate a screen where the operator can see the image taken by the camera and transmitted in real time with minimal delay. This makes possible not only to see what the UAV camera is transmitting, but also enables the operator to know the location of the UAV and have a visual reference of its surroundings to be able to maneuver properly.
When designing the video transmission subsystem for the deployment that has been put forward, it was necessary to research what components could meet the minimum requirements formulated for the UAV. The main challenge to be faced was maintaining image quality at a distance range beyond two kilometers. The chosen AKK receiver has a theoretical range of four kilometers (although it is usually dependent on the conditions of the environment where it is used) so it was deemed as valid for the location where the deployment tests were to be done. The quality of the image offered enables the operator to orient themselves in the air and manage the aircraft in a timely manner. - Radio control subsystem: like the video system, the UAV radio control management system must be adapted to the needs of the project. The system is basically made up of three main components: firstly, the transmitter by which the pilot can control the UAV; secondly, the radio control transmitter module connected to the transmitter, and finally, the radio control receiver on board the UAV. The transmitting and receiving modules must be connected and synchronized through a process called “binding”. This process only needs to be done once during initial aircraft setup. The receiver that goes on board the drone is responsible for transmitting the signal received from the station to the Navio2 controller. The list of components that has been used for this purpose is as follows:
- Station: Taranis QX7 [41], this station offers numerous possibilities due to the following facts: (a) it integrates an internal RC module that works with the Pulse-position modulation (PPM) and Serial Universal Serial Bus (SBUS) protocols (it also incorporates a port to connect external modules that work in different frequencies and with different radio control communications protocols), (b) it implements OpenTX [42], an open-source firmware for radio control transmitters that is highly configurable and incorporates many more features than usually found in traditional radios (also, daily feedback from its users ensures the continued stability and quality of the firmware), (c) it has numerous configurable switches to activate Pulse Width Modulation (PWM) channels and (d) it can work integrated into the UAV, such as the choice of flight mode.
- Radio Controller (RC) Transmitter Module: TBS-Micro Transmitter Crossfire V2 [43]. The transmitter manufacturer is specialized in the design of radio-controlled components for long-range use. The communications protocol that it usually uses is CrossFire (CRSF), which is developed by the manufacturer itself (TBS) and its main advantage is a faster cycle time and bidirectional communications, enabling data such as telemetry to be included in the data flow without the need to use additional ports. Since the controller used is not compatible with the CRSF communications protocol, the one used will be Pulse Position Modulation PPM, which is the protocol recommended by the manufacturer of the flight controller. Its main advantage is that only one signal cable is needed to receive the radio control channels (channels 8 to 16). A PPM signal is nothing more than a series of PWM signals transmitted through the same cable one after the other. The transmitter module has a built-in T-shaped antenna. These types of antennas are used for the transmission of medium and long wavelength signals.
- RC receiver (on board the UAV): CrossFire Nano Rx [44]. It is a small-sized receiver of great usefulness due to its small size, in addition to the robustness and range it offers. The normal course of action would be for it to implement the TBS Crossfire (CRSF) protocol, but given the impossibility of doing so, it is also compatible with PPM. The radio control receiver has another T-shaped antenna that will be placed on one of the legs of the drone.
- Rotors: the rotors that have been selected for the prototype are the MN2212 18 model from the manufacturer T-Motor. They are specific for UAVs used to travel long distances and usable in, at least, medium sized-UAVs. In case of this UAV, the rotors have 920 KV (KV refers to the constant revolutions of a rotor per Volt, that is to say, the revolutions per minute that the rotor offers when 1 Volt of voltage is applied). While its maximum speed is not as high as what racing drone motors can offer, it is torquier and will lift the UAV with ease. Additionally, motors with a lower KV have a smoother ride.
- ESC (Electronic Speed Control): a speed variator or electronic power controller has as its fundamental purpose to vary the speed of an electric motor, along with the direction of rotation. Typically, the UAV controller sends a PWM signal to the ESC with variations of 1 to 2 ms. If the value is 1 ms, the motor will be stopped. If it is 1.5 ms it will be at half power and at 2 ms it will be at 100% power. For the implementation of the requirement-compliant UAV, four variators of 30 Amperes each have been chosen. There are several ESC features that must be considered, like the maximum current that an ESC can deliver to the motor, the size of the propellers, the number of battery cells or the type of motor that is being used in the UAV.
- Finder: while it is an accessory not essential for the operation of the aircraft, it can be very useful for the operator when an UAV has an accident (i.e., the UAV falls into an area with high vegetation and becomes difficult to locate). In the environment where the deployment will be made there are areas with cereals, tall grass, bushes, etc. Therefore, it will be necessary to integrate the finder in our aircraft. This finder is connected to one of the PWM channels that the Navio2 has and is activated through a switch in the transmitter. The chosen Finder is the JHE42B S model [44]; it has an extra battery that gives it a few minutes of duration if the UAV battery runs out of power. It is also possible to use the sound emitted by its buzzer to guide the sheep in the desired direction, although they may ignore it once they get used to it.
- Battery: the battery mounted by the aircraft must have enough autonomy for the UAV to travel to the desired area and be able to make the return trip. The deployment that has been performed works with relatively long distances (2–3 km), so a battery with a higher capacity than those regularly used is required. The choice made is a LiPo battery (Lithium Polymer). This type of battery has been selected due to its energy storage capacity, in addition to the fact that it offers a high discharge rate, something very necessary for multi-rotors. The battery has 4 cells of 3.7 Volts each, so its nominal voltage is 14.8 Volts. It has a discharge capacity of 25 C and a capacity of 6750 milliamperes, enough to cover the distances used in the deployment for testing purposes. Cs of a LiPo battery refer to the rate of discharge. It stands for the capacity of a battery, usually measured in Ampere hours or Ah. The higher the C of a battery, the shorter its life and the higher the speed it can achieve. In this case, being 25 C, there is a balance between battery life and the maximum speed that the aircraft can reach. It has been estimated that, considering the other parts of the UAV, this battery would have a duration of about twenty-one minutes. Due to the feedback received by the farm workers where tests took place, it has been regarded as enough for the aircraft to perform reconnaissance and herd-gathering missions. Considering that the UAV can travel at an average speed of 30 km per hour, during the battery life duration it could travel up to about 10 km without the risk of running out of energy. Based on the data shown, it can be concluded that the chosen battery satisfies the requirements of the project.
- As for the Radio Control System of the aircraft, it offers the possibility of PPM or SBUS protocol and has 14 fully configurable PWM channels for the implementation of different modules. In addition, it has other ports and a high-sensitivity barometer that allows the UAV to be positioned with high accuracy.
3.4. Prototyping of Software Components
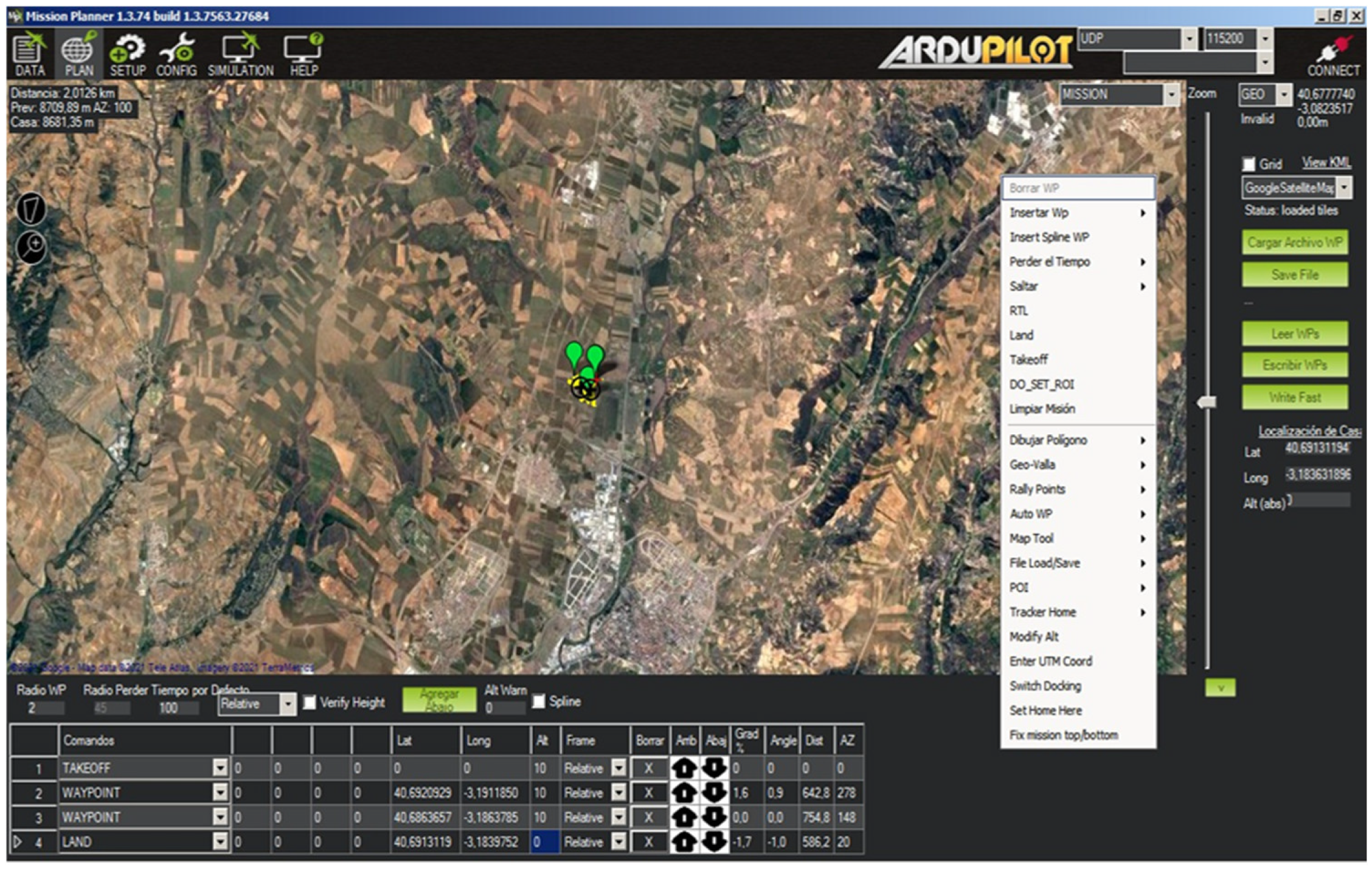
3.4.1. Command Ground Station Software Prototyping
- Creation of routes for autonomous missions.
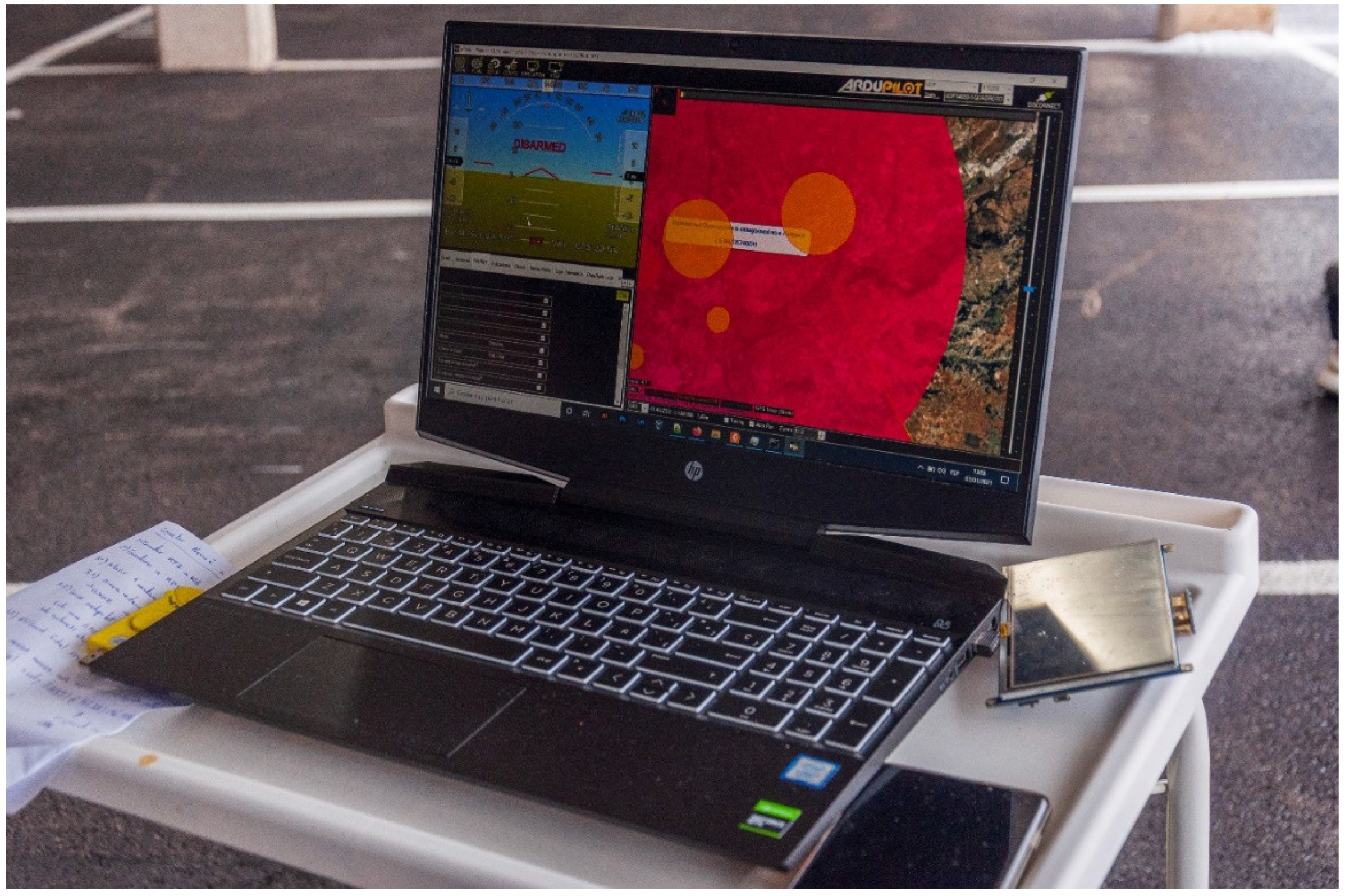
- Creation of geofences using Google Maps, Open Street Maps or customized WMS (Web Map Services).
- Selecting commands for the mission through its Graphical User Interface (GUI).
- Downloading .log files with mission records for later analysis.
- Configuration of the settings for the auto piloting of the vehicle.
- Interface with a flight simulator for the creation of a complete software in the loop UAV simulator.
- Execution of SITL simulation on different frameworks for all ArduPilot vehicles.
- The creation of routes for autonomous missions is one of the functions implemented by the program that is most useful for the system proposal described in this manuscript. With this function, the operator of the aircraft can plan a fully autonomous flight by configuring numerous parameters such as the route to be followed by the aircraft, the altitude to be carried at all times or the actions to be carried out in an unforeseen event. With this, the farm staff can schedule reconnaissance flights to check that the herd is in the place where it should be, that there is water in the drinkers, etc. Another possibility is carrying out reconnaissance routes to look for possible dangers in the pasture, such as the presence of feral animals that can prey on the livestock, or an area with better conditions for the cattle. By means of the GUI offered by the Mission Planner software, the instructions are configured with the parameters that the UAV must follow during the flight. Some examples of parameters that must be configured would be (a) the height to which the aircraft must rise on takeoff, (b) the “waypoints” or route points that it must follow or (c) the speed at which it must move, (d) the point where it must land. The parameters mentioned are the most basic that a flight plan must contain. However, there are many more configurable parameters when establishing a flight plan.
- The other functionality that should be highlighted in the program is its general GUI, which allows the configuration of many parameters such as the station and everything related to it (channels, switches), the adjustment of the speed of the motors, telemetry settings, etc. In addition to that, it also has a window where all the telemetry parameters that can be useful for the handling of the UAV by the operator are shown.
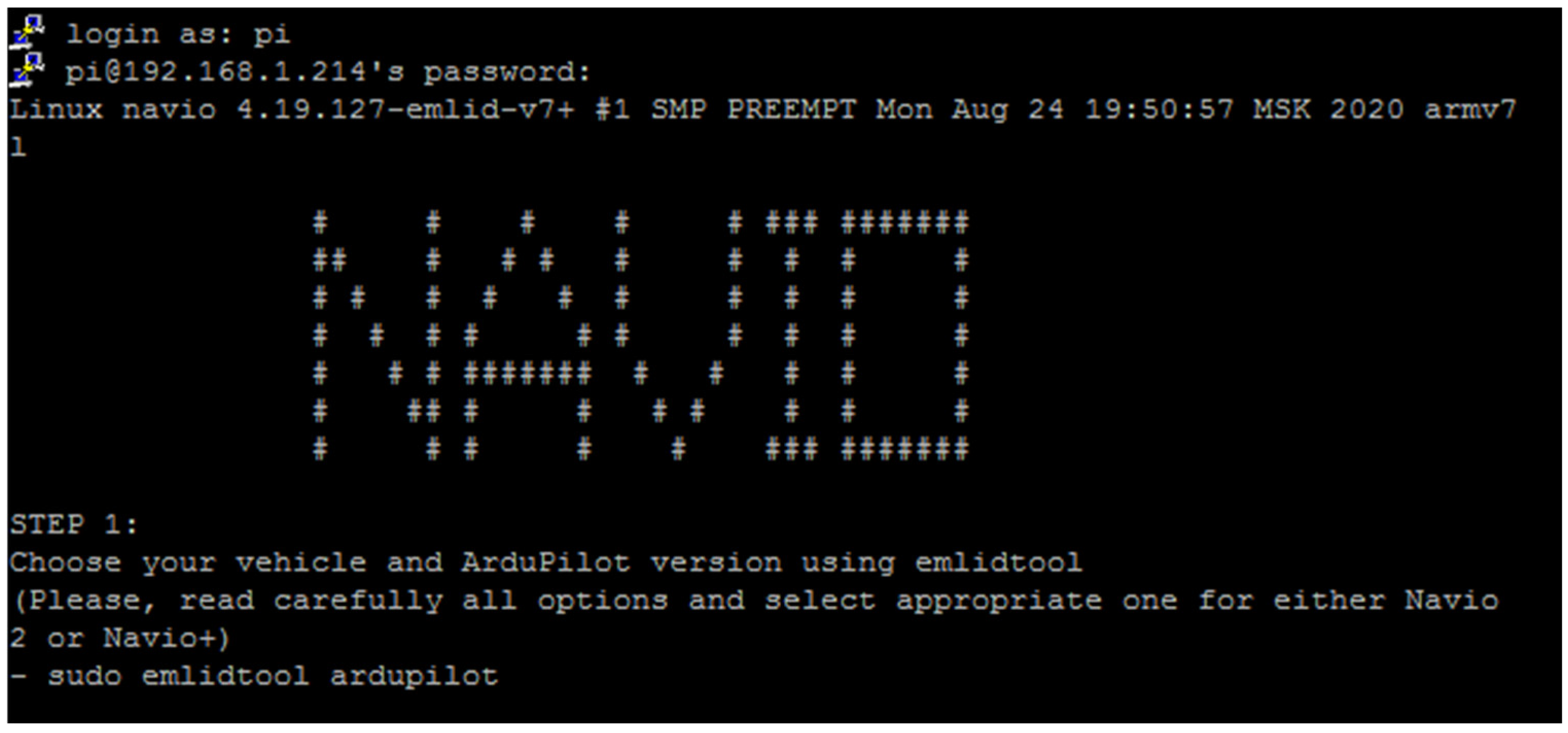
3.4.2. UAV Software Prototyping
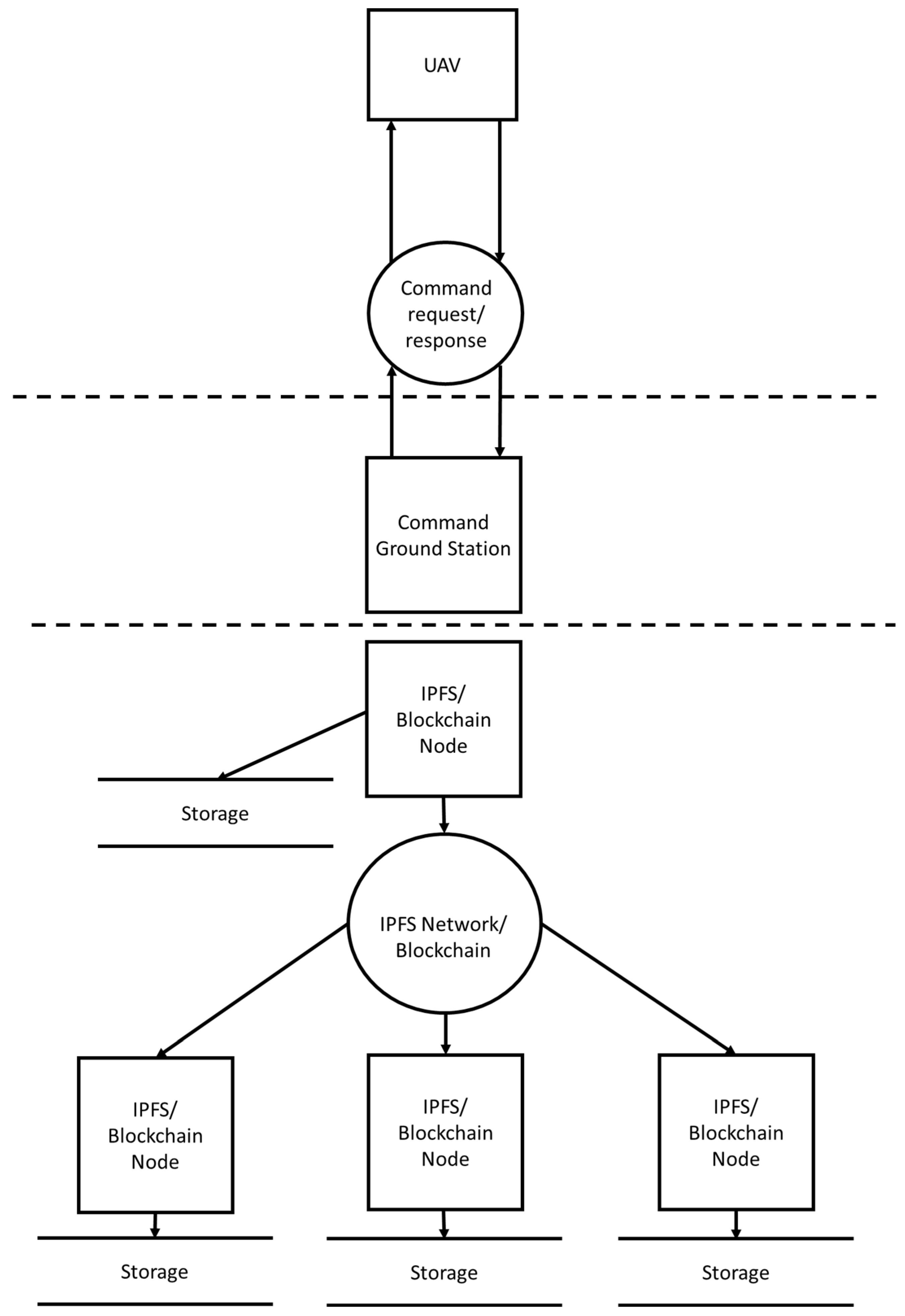
3.4.3. IPFS Prototyping
- The information or contents are sought via a web request pointing at the contents themselves rather than their location. That is to say, the HTTPS request used to obtain the resource provides the very resource itself, rather than the location (folder, directory, etc.) where it would be located. This is done so by identifying the content with a hash function output that becomes embedded in the Uniform Resource Identifier (URI) used for content requests. Therefore, every URI becomes naturally different, as every piece of content has a different hash output.
- The nature of the web request (or as it will be shown, requests) perform to obtain the resource is different from the client/server regular one. IPFS relies on a decentralized storage of information, where there are several IPFS nodes (which can be any IPFS-enabled computer, as the demand for computational resources is relatively low) that can provide the requested piece of information. Once the resource has been obtained, it becomes available in the network for other users as well, so the resource will be shared among them rather than just obtained after the request has been completed. It is claimed that, in this way, not only resources are shared among the different parties for an easier access and increased availability of files, but also the computer used for downloading those files collaborates in distributing them, as it makes the files available to the network while keeping the anonymity of the users behind the IPFS nodes.
- It provides replicas of the information collected by the system, both included in the blockchain (as explained before, the data collected is stored as JSON objects in files keeping a blockchain-based structure like the one described in the next subsection and in Section 4) and, in case they are left out, as files to be shared in the IPFS network.
- Eliminates the need to create a specific system server and having to keep it up and running at every moment so that availability of the content is guaranteed. Since information is saved in every IPFS node, it will be available even if just one of the IPFS nodes is still online and can be reached.
- It makes more difficult to alter the information stored, since not only any data tampering will be noticed whenever the blockchain data validation is taking place, but also because it would have to be changed in each of the IPFS/blockchain nodes that share the data, which would require a very significant effort in terms of time, funds, and computational resources.
3.4.4. Blockchain Prototyping
- It can be used for transparency in data for any required third-party assessment. The data collected by the UAV will be formatted so that they can be placed in a string of characters with any other piece of useful content that do not have multimedia capabilities, such as timestamps. As far as the development works shown here are concerned, images were formatted to Base64 so they could be included as characters. This image formatting is reversible, so images can be formatted back to their original data format if required.
- It can store several kinds of multimedia information. As for the implementation works included here, images have been formatted to be included in the blockchain, but there is no reason not to include other multimedia information, such as video recordings. The underlying IPFS infrastructure can be used to share them as if it was any other kind of data, and so do all the other lower communication layers.
- If used in the way is put forward in this proposal, blockchain does not demand a large quantity of resources, neither for energy nor storage. In the system that is proposed here, every block in the custom-made blockchain is used to store a single piece of information collected by the UAV. However, these blocks are shared as JSON files by means of the underlying IPFS network, rather than using any public blockchain platform or crypto-enabled network (such as Ethereum), so they do not require any gas for data transfers among the nodes. No funds or any kind of money is used in this system proposal to be transferred either, so money transfers do not need to be taken into consideration. Validation of the blockchain is done locally considering all the previously added content, as each of the IPFS nodes works as a blockchain node as well.
- Due to the features previously mentioned, blockchain can be used as a support for good practices certification. As explained before and depending on the requirements from each institution, the information stored in blockchain can be used to prove that cattle is grazing in areas with good access for grass and water, along with any other visible feature in the animals themselves. Typical features of blockchain prevent an effective way of tampering with the information and, should it be tried, it would become rapidly noticeable due to the properties of the hash function used for block summary.
- Distribution has been made possible with the underlying IPFS data networking system, which can be used to share any file related to the transactions stored in the blockchain.
- Redundancy is also supported by IPFS, as there will be several nodes (or repositories) with the same shared information.
- Considering what redundancy can offer in the previous point, transparency comes as another feature that can be provided for any kind of assessment of the information about farming offered in images and other multimedia.
- Immutability will make extremely unlikely to alter in any way the multimedia data collected by the UAV once it has been deployed in the countryside.
- The consensus algorithm used for this deployment is Proof of Work (PoW). While there are some issues about PoW and its energy demand (mining a new block usually requires a significant number of computational capabilities and, therefore, a high amount of energy is demanded for this procedure), that power consumption is acceptable in the application domain where tests have been carried out.
- Redundancy will ensure that all participants in the IPFS network have the same information (that is to say, the same collection of images and timestamps), so any attempt made by just one of them to alter the information will involve making major changes in the whole blockchain (since due to the properties of the chained hash outputs and their verification, changing one will demand either controlling all the blocks deployed afterwards or changing all the hashes until the genesis block), which might require enough resources that outnumber all the other participants in the system with the PoW consensus algorithm used in this development, thus resulting in a significant need for energy and funds to perform such a change.
- Immutability is also a blockchain feature that comes to the benefit of the proposed system. Since changing any hash output is extremely difficult, information that has been included in the customized blockchain about the monitored animals will remain the same, so any claim that is done by farmers or certification authorities can be backed with the data that has been saved.
- The consensus algorithm required to make any addition to the blockchain demands that these changes are validated (by checking the provided versus the calculated hash outputs for each and every block) by all the members of the blockchain/IPFS network. As mentioned, this will give away any individual attempt to change any data on the customized blockchain.
3.5. Security Threat Analysis
- Confidentiality. It is expected that the data that has been collected from the UAV will not be accessible by any unwanted party during the transfer procedures, so that they will not become exposed (as described in [5]). However, any party that has a genuine interest in the information (i.e., farm supervisor, foodstuff quality inspectors, consumers that demand it) will be granted access to this information whenever they request to have it.
- Integrity. Data is expected to be stored in the exact same way that it was collected from the application domain where it was, so that information that can be inferred from those data is legit and not based on false assumptions. While confidentiality is a valuable feature in the system put forward in this manuscript, data integrity is of critical importance, as it will be used by several parties of very significant importance for the farm (supervisors, owners, quality organisms, information verifiers) and the cattle present in it.
- Authentication. It is a security characteristic aimed to provide some form of valid identification that will be revoked, if needed, if any issue takes place. Failure to provide a proper identification should result in negative consequences for the spurious user.
- Availability. This feature is related to the capability of a system to keep itself, or its features, accessible for end users without any unexpected issue, such as the ones that would be found whenever a Denial of Service (DOS) or Distributed Denial of Service (DDOS) attack are taking place. For the context of our proposal, it is the capability to keep the collected information available.
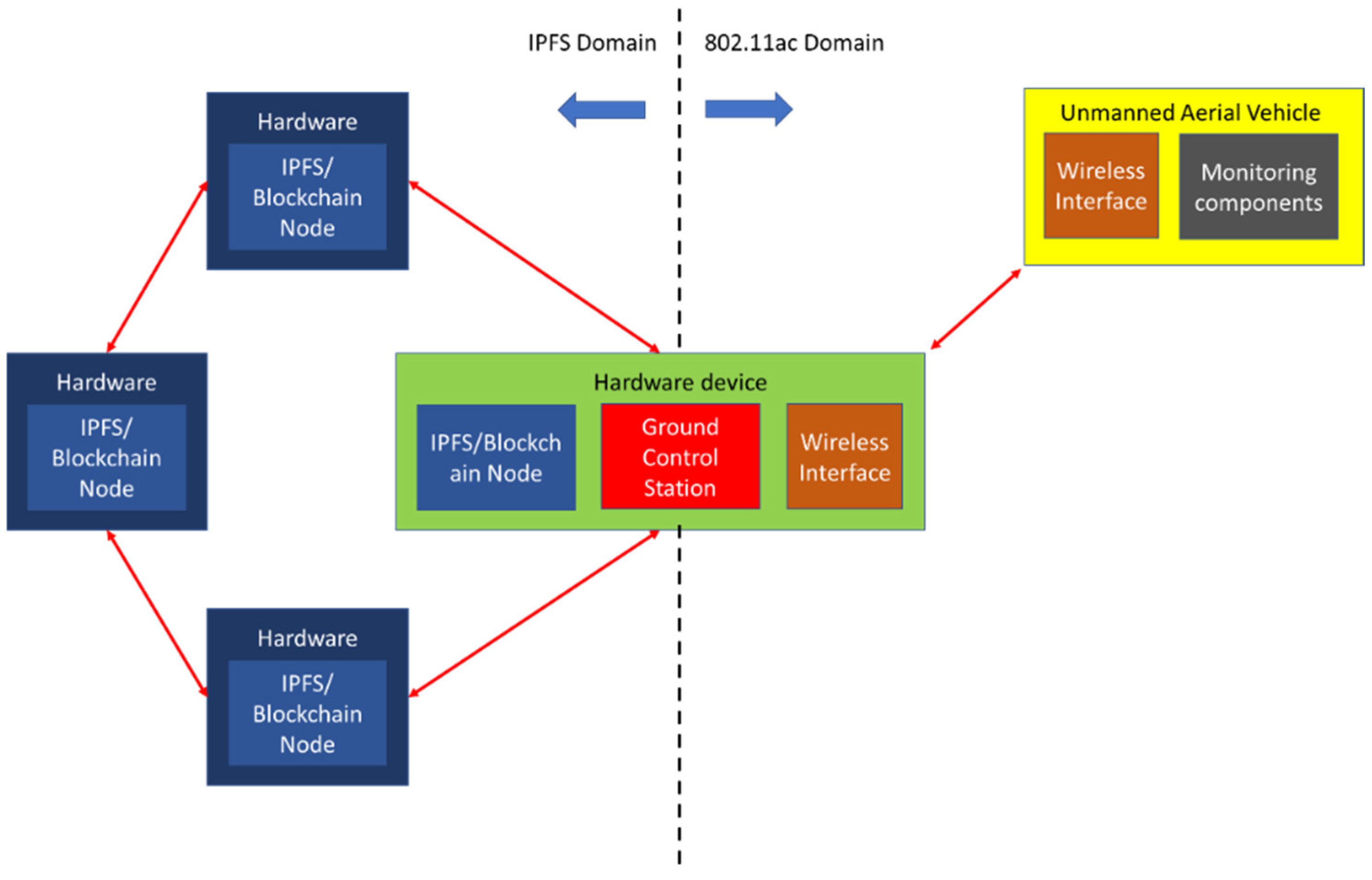
- The one between the IPFS network and the CGS. It separates the IPFS nodes which, in the end, are also based on hardware elements, from the CGS elements used to upload missions to the UAV and/or control it during flights. It must be noted that, due to the dual nature of the hardware used in the deployment, the boundary that separates both parts of the deployment effectively goes through the hardware use for CGS and IPFS network.
- The one between the CGS and the UAV. These two elements are separate entities that will communicate through the wireless 802.11 ac protocol, so that boundary separating the agent and the data traffic that goes through it must be born in mind. Unlike the previous one, the boundaries between these agents are physical and create a separation between the hardware elements of the system.
- In addition to this, the blockchain network must be included in the security solution to be designed. The presence of such a subsystem proves to be an asset, as it is possible to share the data about the different pieces of information that have been added to the IPFS files included as part of the testing activities with an additional level of security derived from the hash outputs used to characterize each block (since PoW is being used as the consensus algorithm, any tried alteration will demand changing not only the hash output of the block where data is tried to be modified, but also the ones from any other block mined afterwards, requiring an amount of computational power hard to have by any regular user).
- The UAV subsystem faces threats related to UAV data tampering and UAV hijacking, which will either result in false data being transferred or damaging and/or losing the UAV. The UAV makes use of a wireless interface that is used in this context to send commands from the CGS and acknowledge their reception from the UAV back to the CGS, so security measures must be taken in the wireless interface
- The CGS has two network data ports that, since they are used for receiving and transmitting data, can be exploited by a spurious party to enter the system. One port is the wireless interface that connects to the UAV, whereas the other is connected to the TCP/IP network that is used to connect the IPFS/blockchain capabilities that the CGS has as a node from these networks to its other distributed peers.
- The IPFS/blockchain nodes represent a fully distributed network that operates under a peer-to-peer paradigm. Consequently, they are prone to cyberattacks typical of distributed systems, like the already explained DOS and DDOS, as well as any other attack that works by faking access credentials or tampering information files data into corrupting the content or showing something different from what was obtained from the UAV.
- Command monitoring: it refers to the capacity of a spurious third party to obtain information about the commands that are being sent to the UAV, or how information is being downloaded for the participants in the system in case this spurious party can exploit it to its advantage. It is countered in the proposed system by using the encryption capabilities that the 802.11 ac network provides.
- Command spoofing: it is referred to the capability of a spurious party to send commands to the UAV without any permission or notification, so that the UAV will perform the actions requested by the spurious party rather than the legitimate ones. The most significant threat about this attack is that the UAV is taken away by the spurious party. Fortunately, it can be countered with the encryption capabilities that are used in the 802.11 ac wireless protocol.
- Denial of Service: in this case, the spurious party will prevent legitimate users from operating the UAV and/or retrieving the information (pictures and videos) collected by means of it. There are two ways that the proposed solution can be used to counter this threat. On the one hand, the wireless protocol used for communications makes use of encrypted capabilities that will enable a higher level of security to the system. On the other hand, having data stored in a decentralized manner will make possible that it is available even if one of the legitime parties that is sharing it comes under attack. Such advantage is typical of distributed systems that enable data redundancy of some kind.
- Distributed Denial of Service: its effects are the same as with the regular Denial of Service attack, but it is performed in a distributed, more sophisticated manner, as it is executed by a plethora of spurious parties (or a single one attacking from different machines) in a network. The countermeasures applied to the previous system are valid for this attack as well.
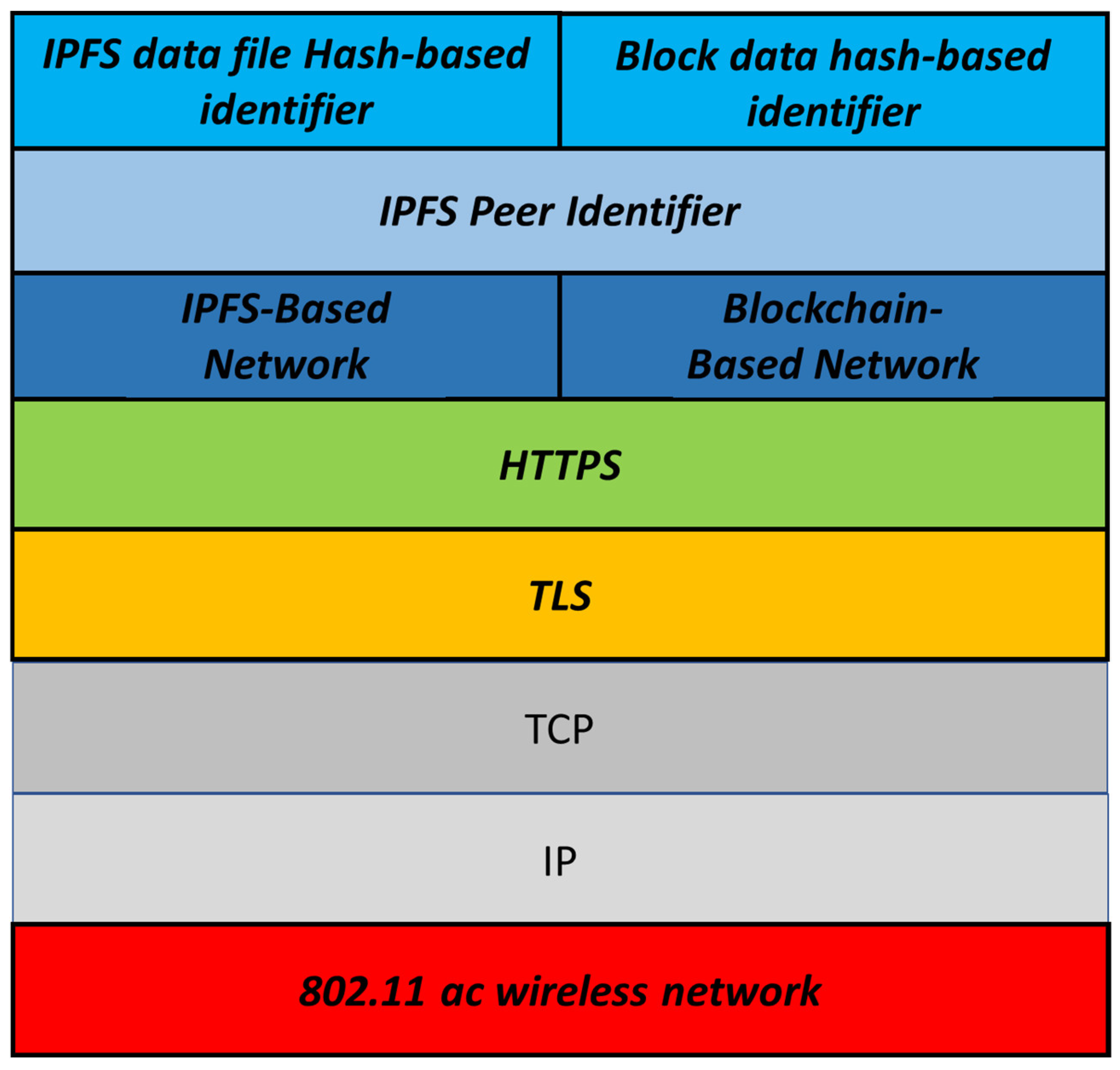
- Data tampering: it refers to the possibility of altering the stored information about the livestock collected by the UAV and kept by the IPFS network that contains the blockchain files that store the information collected by the UAV used for monitoring purposes. This latter subsystem is the one that prevents effective data tampering: once the information is saved onto the network, it is done so with a unique hash number (an output that works as a piece of information characterizing the content of an image) and a timestamp, with both becoming embedded to the data provided. Since the hash number results from applying a hash function to the data, any change on the image or video collected will alter the hash number/output, thus resulting in a hash number/output different from the one that the other participants of the network have, so it will become rapidly evident who the spurious party is. In addition to this, it must be considered that IPFS uses a series of identifiers to guarantee that the data provided neither has been changed, nor the party that first provided it has changed its identification by any means. The IPFS peer identifier ensures that the identification of the node is used to know what user uploaded the files shared with all the other nodes. Additionally, the IPFS hash-based identifiers for the uploaded files provide another unique way of identifying the files in a way that resembles the presented in the blockchain part, so any change in such hash will be noticed by all the other parties sharing that information.
- UAV hijacking. It could happen that a spurious party gets into the system and manages to alter the UAV normal flight. Since this attack is located at the very end of the system (there is no other subsystem beyond the UAV, nor the UAV connects to any subsystem except for the purpose of taking actions based on the commands that have been received) any security flaw in the wireless interface used to control it or in any previous stage (i.e., credentials to access the CGS got leaked, as it will be mentioned in the next point) can be responsible for the success of this cyberattack. To prevent this, the best action that can be carried out is making use of a secure wireless connection between the CGS and the UAV. In our implementation of the proposed system, this has been done with the built security capabilities provided by the 802.11 ac wireless protocol used for command and data transfer between the CGS and the UAV.
- CGS credentials exposure. If access to the CGS is obtained by an illegitimate user, they will have complete access to one of the most prominent elements of the system and most of the other security measures will become useless. To prevent this, credentials must be created following several guidelines, which include updating those credentials periodically or making them stronger by applying hash functions or cryptography features on them.
- The wireless, physical interface is based on 802.11 ac, which provides data encryption capabilities that secure communications when real-time commands are transmitted to the UAV, or images are transmitted from it.
- At the transport layer, Transport Layer Security (TLS) protocol can be offered as an additional security solution where the transport layer that transfers segments through the network becomes secure as well. Besides, HTTPS requires the usage of TLS for its own functionalities, so its usage is little less than mandatory in this context: with a TLS certificate, HTTPS can encrypt web requests and responses (which becomes especially useful when requesting information to the IPFS network) that can be digitally signed.
- Security protocols provided at the application level before reaching the IPFS network has also been offered by means of using HTTP Secure (HTTPS) as the application layer protocol, which will enable further securitization of communications when working combined with TLS.
- The IPFS network provides a level of decentralization that, in addition to storing information in a decentralized manner, provides a hash number and a timestamp that characterizes every new whole piece of data.
- Blockchain files stored in the IPFS nodes ensure that the collected information is also provided an additional hash that, instead of just identifying each of the data, can effectively link the pieces of data as they are collected by the UAV, thus not only characterizing each of them, but also creating a time-ordered list of information that, due to the usage of consensus algorithms, cannot be modified without knowledge by the blockchain nodes (and by proxy, the IPFS network).
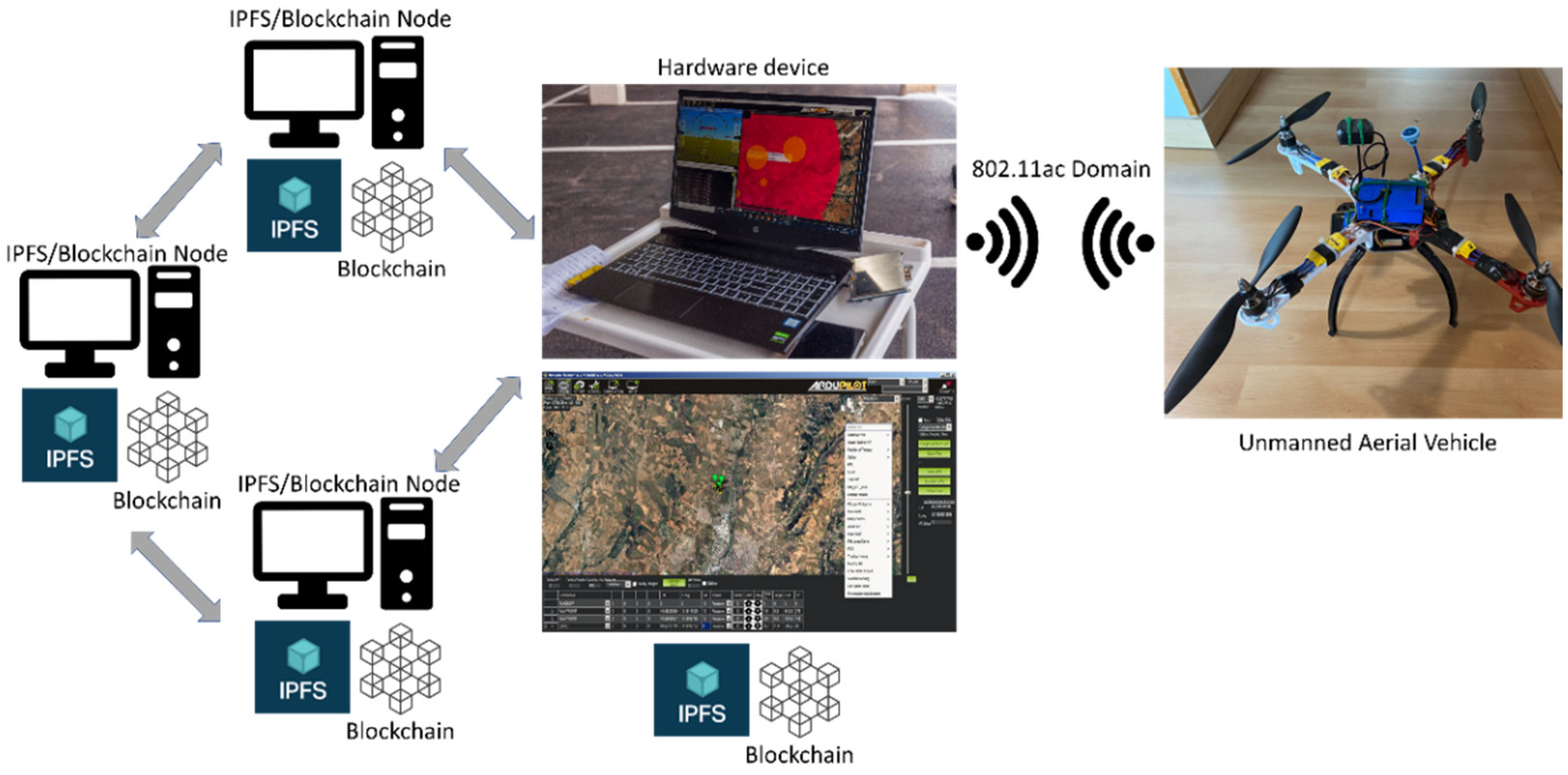
3.6. Assembly of the Prototype System
- The Radio Controller module must be configured. To do so, the software used in such controller might have to be updated. This is required in case there are new functionalities that improve the usefulness of the Radio Controller itself.
- Once this procedure is complete, the pairing process (binding) between the receiver and the transmitter must be completed. This will be done by adjusting any required parameters on the Radio Controller (maximum power output, frequency, etc.).
- When the connection process between the transmitter and the receiver has been successfully established, the flight mode will be configured. These flight modes are configured through the Mission Planner software from the CGS and are activated and deactivated from the transmitter.
- It will also be necessary to make the correct configuration of the radio control channels to carry out proper handling of the UAV. To do so, it is necessary to connect the battery to the aircraft and connect to the Raspberry Pi through the SSH protocol.
- Afterwards, the different components of the UAV can be calibrated. In this regard, we proceed with the calibration of the accelerometer. This component is integrated in the controller and is responsible for providing information on the forces that work against the UAV flight (wind, gravity, etc.) to keep it always stabilized. It must be connected to the CGS and place the aircraft in the positions indicated by the Mission Planner software.
- The UAV compass must be calibrated right afterwards. This component is also integrated in the controller and allows the aircraft to know in which direction it is pointing. To carry out this process it is necessary to take the UAV and rotate it 360 degrees around all axes.
- Next, the radio transmitter is calibrated. It is necessary to ensure that all the transmitter controls respond correctly and that their transmitted signal level corresponds exactly to that received by the UAV. It is needed to configure throttle, pitch, yaw, roll maneuvers and a switch to select flight modes.
- The final step required in the UAV setup is to select the flight modes to use. The Mission Planner software has 25 flight modes, of which 6 are used. The flight modes are assigned to one or more of the channels that the transmitter has and are selected through the position of the switch. The flight modes used are as follows:
- Stabilize: This flight mode is used most of the time. It allows the operator to fly over a surface keeping the UAV in a stable position during flight.
- RTL (Return to Launch): When this flight mode is activated, the UAV automatically returns to the point where it took off and lands. It is very useful for when the operator wants the UAV to return to the base.
- Auto: used to perform predefined missions through the software (usually, autonomous missions).
- Land: It reduces progressively the UAV altitude to ground level. It is used to land the UAV.
- Brake: used to perform an emergency stop. In the event of an unexpected event or accident, it stops the UAV motors.
4. Testing and Result Discussion
4.1. Preliminary Testing
- Takeoff from point A and lift to 10 m high.
- Displacement in a straight line of 15 m to a point B.
- Wait 5 s at point B.
- Return to point A.
- Landing.
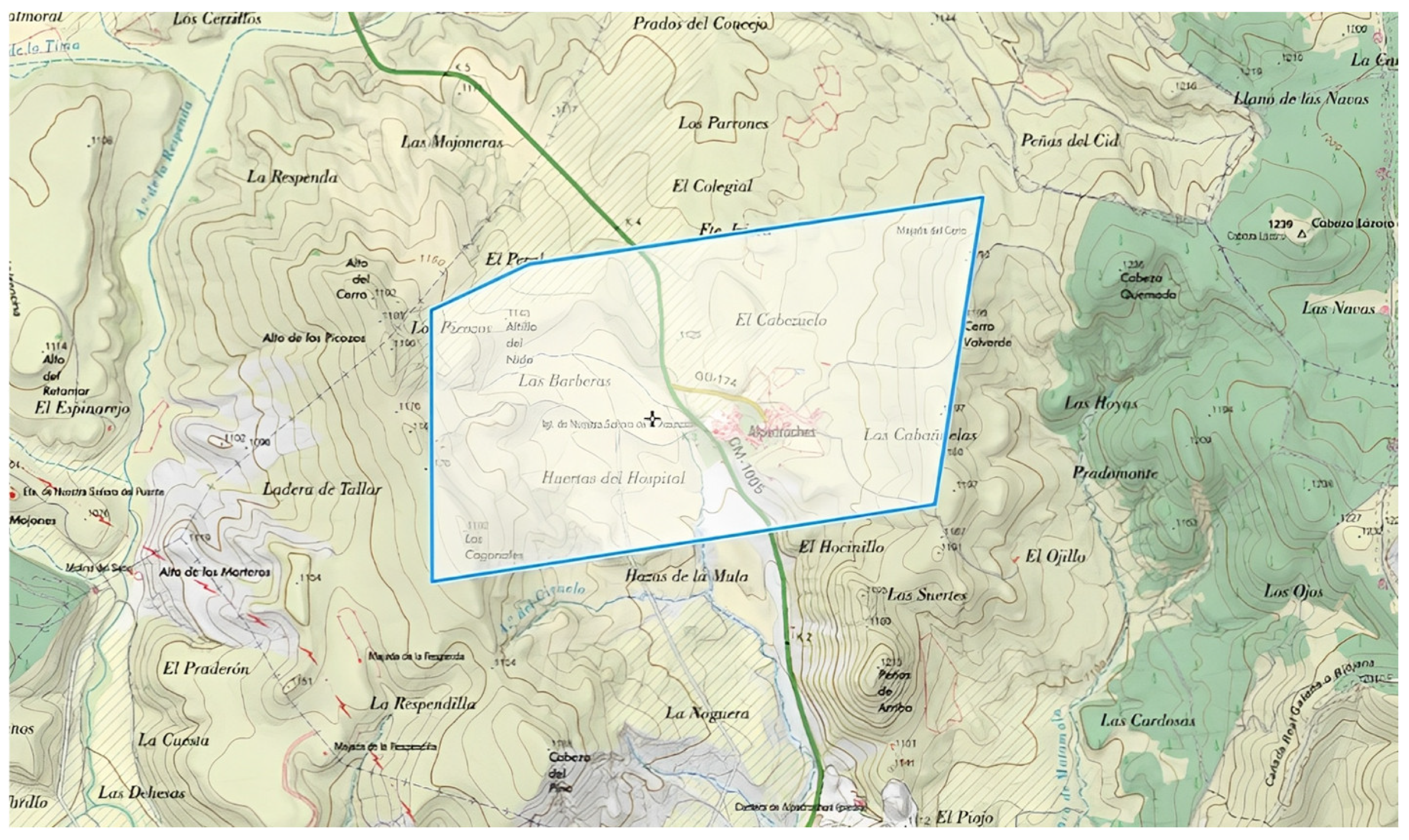
4.2. System Deployment in the Real Scenario
- Current block hash: it identified in a unique manner the data that had been included in the system. It can be regarded as the result of applying a hash function on several pieces of information (usually, current block data, a nonce number, the previous block hash, and timestamps as input data).
- Previous block hash: it was used as part of the data utilized as input to calculate the hash of the current block, thus chaining together each of the blocks that contain data.
- Data: These were the actual information collected by the UAV. Typically, it will consist of some multimedia information that will be formatted so that it can be added to the blockchain as text. In the tests that were carried out the codification chosen was Base64, so images were converted into a string of characters that was added to the block. When required, this codification can be reversed, and the image is back to its original format and appearance.
- Timestamp: it was a piece of information useful to know when data were included in the blockchain.
- Nonce: it is an acronym of “number used only once” used to guarantee that there will not be two similar hash outputs in the blockchain.
- Status: this tab is used to visualize information about bandwidth usage over time and network traffic during a specific period.
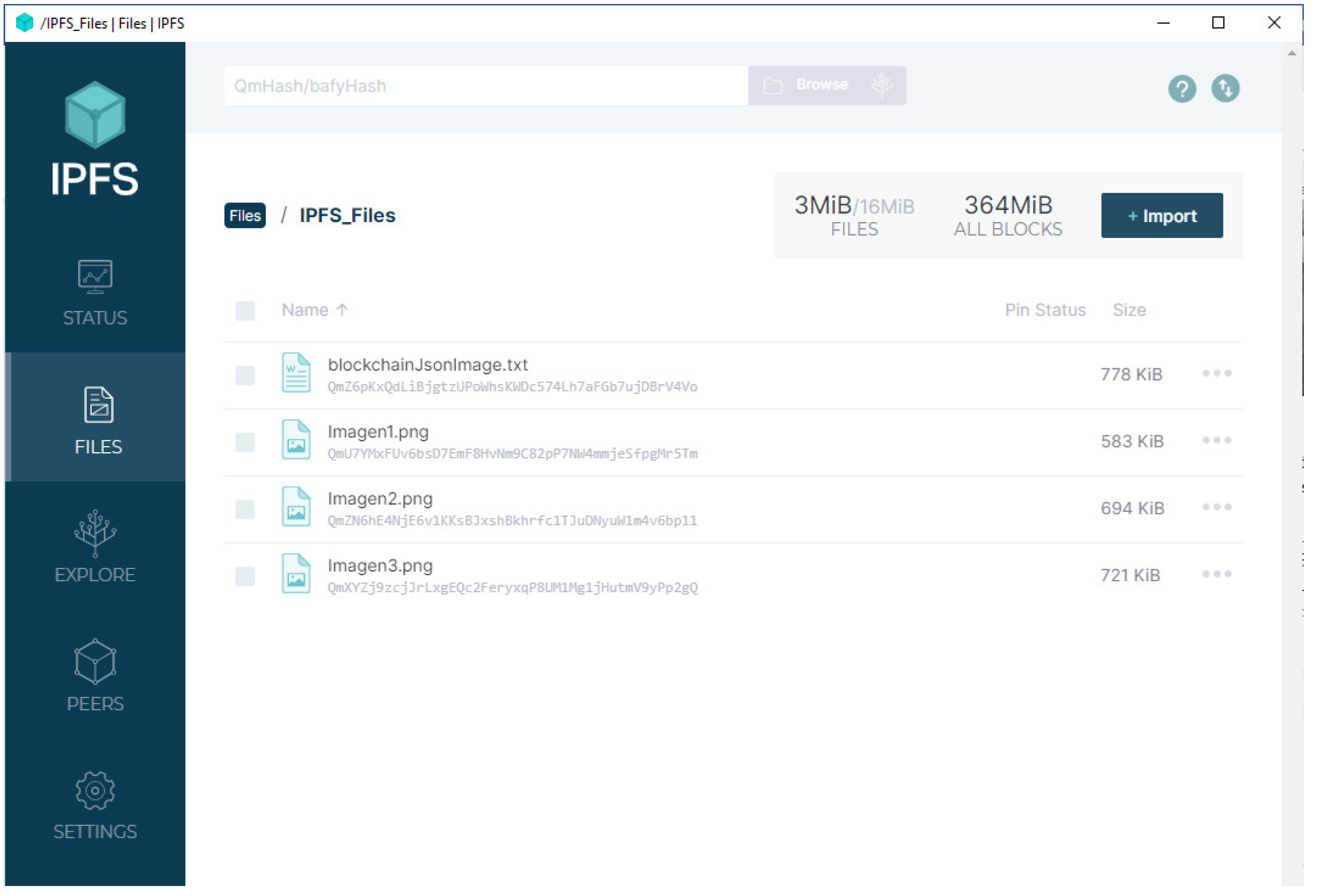
- Files: used to show the files that have been uploaded onto the node, along with what characteristics has each of them, like the IPFS link to access it or its identifying hash.
- Explore: used to see the Merkle tree resulting from the application of the InterPlanetary Linked Data.
- Peers: it is useful to explore the number of users present in the IPFS network where the information is being uploaded.
- Setting: this tab is used for the IPFS node system settings, such as the public gateway used for data requests or the file pinning so it will not be garbage-collected.
|
[ { “hash”: “36b81a86281783aa06ad46b269b11a57fe39c784f17888ffcb0a5674399e4bd6”, “previousHash”: “0”, “data”: “Genesis”, “timeStamp”: 1662373905696, “nonce”: 0 }, { “hash”: “2817df1646973ecbc25ee620357f9a7a4ca595b13aaad862ac42d614ce94ac23”, “previousHash”: “431695e2c33be553bb6faef3c9470764bcb4b11d12978ad7d91e9b9ccc8e701a”, “data”: “data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAAocA […] BJRU5ErkJggg\u003d\u003d”, “timeStamp”: 1662373905728, “nonce”: 0 } ] |
4.3. Result Discussion
- UAV flight over flat terrain: this experiment was performed to test the performance of the UAV that had been built from the scratch with the purpose of checking how good its flying abilities were. It was expected that the UAV would fly with ease and no issues. Results matched the expectations.
- UAV flight over hilly/rocky terrain: this experiment was performed to know how different terrain conditions would affect the UAV flight, or if any change would take place at all. While flight itself was fine, the UAV flipped over when landing had to be taken (this resulted in no damage for the UAV). More careful planning for landing was performed afterwards.
- UAV flight over cattle: the flight of the UAV was tested to know to what extent the system built with FPV equipment, along with the UAV, would work for cattle monitoring when the UAV flies at a certain altitude above the animals. They worked as expected with no issue. Due to altitude flight, animals were oblivious to the existence of the hovering UAV in this experiment.
- UAV shepherd-like flight: this experiment was carried out with the purpose of gathering the sheep scattered in the countryside, in a functionality that would mimic what a shepherd dog would do. There were some previous ideas about what to expect from this experiment due to the reviewed literature, so it was believed that the cattle would behave in way comparable to how they would behave with an actual shepherd. This expectation was indeed confirmed by the field tests: the UAV would push the sheep around so that they became a compact herd that could be rounded up and guided with ease.
- Data collection from UAV: the experiment described shows that information could be obtained from the UAV, and it would be relevant enough. Since images of the gathered sheep and their location were obtained, expectations regarding this experiment were regarded as fulfilled.
- Data sharing via blockchain: this experiment had as target the information that had been collected from the UAV, as it was expected to include it in a blockchain tailored for this proposal that would enhance its availability. Once the images were converted to Base64 text, there were no issues adding the to the tailored blockchain that was developed for the project.
- Data sharing via IPFS: the experiment involved sharing he data that had been integrated in the blockchain as JSON-formatted files among the participants of the IPFS network. Although it was possible to perform this action, the public caching website described in [51] was used to enhance data availability.
5. Conclusions and Future Works
- Tailored UAV and FPV systems. Rather than using a commercial solution or some hardware reused from a different project, an UAV specifically built for the purpose shown in this manuscript has been described from two different points of view: (a) on the one hand, the information compiled from professional staff working in cattle monitoring and guiding throughout the countryside and (b) the studied State of the Art and its remaining open issues. With these two contributions a list of functional and non-functional requirements was developed, both for the UAV and the other subsystems of the developed solution, that provided guidelines and boundaries for the kind of UAV to be used, especially in terms of the radio transmission equipment (which had to be suited to the distances and needs of the farmers, so they could monitor the animals from a distance ranging in kilometers) and the FPV equipment to be used in visualizations (i.e., what kind of goggles to use). To the best of our knowledge, there is no other research work that offers this kind of solution based on requirements obtained both from previous research work and interviews from end users in this application domain.
- Usage of blockchain for UAV information storage. Blockchain as a way to store multimedia information collected from UAVs in a distributed manner is, at the moment of composing this manuscript in the application domain of agriculture, a technology that has not been used to a significant extent. It provides features that are desirable for end users at farms, like data redundancy, immutability transparency that are hard to provide combined in a reliable manner. It has been previously justified, along with the other used technologies, why the addition of blockchain is a suitable idea, and how it can provide benefits to any farmer looking to prove that their cattle have been well-treated, the same way that blockchain is used in developments related to the production of foodstuffs in the supply chain and other manufacturing procedures.
- Usage of IPFS for information sharing at the data level. In order to enhance security and availability of the data shown, an infrastructure to share the files containing blockchain information has been provided, so that once the information added is verified and validated (which is done by the consensus algorithm used in the blockchain development) can be shared among a plethora of participants in a fully decentralized manner and without requiring any centralized repository that would question the legitimacy of the decentralization of the system (if the information provided is kept in a repository controlled by a single party, regardless of what kind of data structure is used to save the information). Usage of IPFS is unknown to us in the context that this manuscript describes.
- Lastly, this list of functional and non-functional requirements (as depicted in Table 4 and Table 5 and developed in Table 6) establishes a starting point for similar deployments that can be reused for application domains that are comparable to the one that has been presented here. The advantage of having this list to give design and implementation for hardware and software components should not be underestimated.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Navarro, E.; Costa, N.; Pereira, A. A Systematic Review of IoT Solutions for Smart Farming. Sensors 2020, 20, 4231. [Google Scholar] [CrossRef] [PubMed]
- Barreto, E.; Amaral, A. Smart Farming: Cyber Security Challenges. In Proceedings of the International Conference on Intelligent Systems (IS), Crete, Greece, 5–7 May 2018; pp. 870–876. [Google Scholar] [CrossRef]
- Lamela, M.P.; Rodríguez-Molina, J.; Martínez-Núñez, M.; Garbajosa, J. A Blockchain-Based Decentralized Marketplace for Trustworthy Trade in Developing Countries. IEEE Access 2022, 10, 79100–79123. [Google Scholar] [CrossRef]
- Díaz, V.H.M.; Martínez, J.-F.; Cuerva, A.; Rodríguez-Molina, J.; Rubio, G.; Jara, A. Semantic as an Interoperability Enabler in Internet of Things. In Internet Things: Converging Technologies for Smart Environments and Integrated Ecosystems; River Publishers: Gistrup, Denmark, 2013; Chapter Nine; Volume 1, pp. 315–342. [Google Scholar]
- Rodríguez-Molina, J.; Corpas, B.; Hirsch, C.; Castillejo, P. SEDIBLOFRA: A Blockchain-Based, Secure Framework for Remote Data Transfer in Unmanned Aerial Vehicles. IEEE Access 2021, 9, 121385–121404. [Google Scholar] [CrossRef]
- Zhang, C.; Xiao, L.; Zheng, X.; Rui, L. FengHuoLun: A Federated Learning based Edge Computing Platform for Cyber-Physical Systems. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Austin, TX, USA, 23–27 March 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Abro, G.E.M.; Zulkifli, S.A.B.M.; Masood, R.J.; Asirvadam, V.S.; Laouti, A. Comprehensive Review of UAV Detection, Security, and Communication Advancements to Prevent Threats. Drones 2022, 6, 284. [Google Scholar] [CrossRef]
- Welfare Quality Network Web Site. Available online: http://www.welfarequality.net/en-us/home/ (accessed on 26 October 2022).
- AENOR (Asociación Española de Normalización y Certificación). Animal Welfare in Livestock and Slaughterhouse Operations. Available online: https://www.en.aenor.com/certificacion/alimentacion/bienestar-explotaciones-ganaderas-mataderos (accessed on 26 October 2022).
- Xiaohui, L.; Xing, L. Use of Unmanned aerial vehicles for livestock monitoring based on streaming K-means clustering. In Proceedings of the 6th IFAC Conference on Sensing, Control and Automation Technologies for Agriculture AGRICONTROL, Sydney, Australia, 4–6 December 2019; Volume 52, pp. 324–329. [Google Scholar] [CrossRef]
- Liu, C.; Jian, Z.; Xie, M.; Cheng, I. A Real-Time Mobile Application for Cattle Tracking using Video Captured from a Drone. In Proceedings of the International Symposium on Networks, Computers and Communications (ISNCC), Dubai, United Arab Emirates, 31 October–2 November 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Jung, S.; Ariyur, K.B. Strategic Cattle Roundup using Multiple Quadrotor UAVs. Int. J. Aeronaut. Space Sci. 2017, 6, 315–326. [Google Scholar] [CrossRef]
- Behjati, M.; Mohd Noh, A.B.; Alobaidy, H.A.H.; Zulkifley, M.A.; Nordin, R.; Abdullah, N.F. LoRa Communications as an Enabler for Internet of Drones towards Large-Scale Livestock Monitoring in Rural Farms. Sensors 2021, 21, 5044. [Google Scholar] [CrossRef] [PubMed]
- Abdelmaboud, A. The Internet of Drones: Requirements, Taxonomy, Recent Advances, and Challenges of Research Trends. Sensors 2021, 21, 5718. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Shuhua, Y.; Fujiang, H.; Dongwen, L.; Junqi, H.; Zhaoye, Z. Quantifying the Dynamics of Livestock Distribution by Unmanned Aerial Vehicles (UAVs): A Case Study of Yak Grazing at the Household Scale. Rangel. Ecol. Manag. 2020, 73, 642–648. [Google Scholar] [CrossRef]
- Mulero-Pázmány, M.; Barasona, J.A.; Acebedo, P.; Vicente, J. Unmanned Aircraft Systems complement biologging in spatial ecology studies. Ecol. Evol. 2015, 5, 4808–4818. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Al-Thani, N.; Albuainain, A.; Alnaimi, F.; Zorba, N. Drones for Sheep Livestock Monitoring. In Proceedings of the IEEE 20th Mediterranean Electrotechnical Conference (MELECON), Palermo, Italy, 16–18 June 2020; pp. 672–676. [Google Scholar] [CrossRef]
- Nyamuryekung’e, S.; Cibils, A.; Estell, R.; Gonzalez, A. Use of a UAV-Mounted Video Camera to Assess Feeding Behavior of Raramuri Criollo Cows. In Proceedings of the10th International Rangeland Congress, Saskatoon, SK, Canada, 16–22 July 2016. [Google Scholar]
- Alanezi, M.A.; Sadiq, B.O.; Sha’aban, Y.A.; Bouchekara, H.R.E.H. Livestock Management on Grazing Field: A FANET Based Approach. Appl. Sci. 2022, 12, 6654. [Google Scholar] [CrossRef]
- Chamoso, P.; Raveane, W.; Parra, V.; González, A. UAVs Applied to the Counting and Monitoring of Animals. In Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2014; Volume 291. [Google Scholar] [CrossRef] [Green Version]
- Andrew, W.; Greatwood, C.; Burghardt, T. Visual Localisation and Individual Identification of Holstein Friesian Cattle via Deep Learning. In Proceedings of the IEEE International Conference on Computer Vision Workshops (ICCVW), Venice, Italy, 22–29 October 2017; pp. 2850–2859. [Google Scholar] [CrossRef] [Green Version]
- Andrew, W.; Greatwood, C.; Burghardt, T. Aerial Animal Biometrics: Individual Friesian Cattle Recovery and Visual Identification via an Autonomous UAV with Onboard Deep Inference. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 237–243. [Google Scholar] [CrossRef] [Green Version]
- Mufford, J.T.; Hill, D.J.; Flood, N.J.; Church, J.S. Use of unmanned aerial vehicles (UAVs) and photogrammetric image analysis to quantify spatial proximity in beef cattle. J. Unmanned Veh. Syst. 2019, 7, 194–206. [Google Scholar] [CrossRef]
- Mamehgol Yousefi, D.B.; Mohd Rafie, A.S.; Al-Haddad, S.A.R.; Azrad, S. A Systematic Literature Review on the Use of Deep Learning in Precision Livestock Detection and Localization Using Unmanned Aerial Vehicles. IEEE Access 2022, 10, 80071–80091. [Google Scholar] [CrossRef]
- Yan, B.; Li, J.; Yang, Z.; Zhang, X.; Hao, X. AIE-YOLO: Auxiliary Information Enhanced YOLO for Small Object Detection. Sensors 2022, 22, 8221. [Google Scholar] [CrossRef] [PubMed]
- Longmore, S.; Collins, R.; Pfeifer, S.; Fox, S.; Mulero-Pázmány, M.; Bezombes, F.; Goodwind, A.; Ovelar, M.; Knapen, J.; Wich, S. Adapting astronomical source detection software to help detect animals in thermal images obtained by unmanned aerial systems. Int. J. Remote Sens. 2017, 38, 8–10. [Google Scholar] [CrossRef]
- Mission Planner Home—Mission Planner Documentation. 2021. Available online: https://ardupilot.org/planner/docs/mission-planner-overview.html (accessed on 14 December 2021).
- F450 Integrated 4 Axis Quadcopter Frame PCB for Flamewheel F450, Multicopter. 2022. Available online: https://www.multicoptero.com/es/tienda-on-line/drones-dji/dji-f450-f550/ (accessed on 24 February 2022).
- Navio2: Autopilot HAT for Raspberry Pi. Powered by ArduPilot and ROS. Available online: https://navio2.emlid.com/ (accessed on 27 October 2022).
- Raspberry PI 3B Datasheet. Available online: https://www.alliedelec.com/m/d/4252b1ecd92888dbb9d8a39b536e7bf2.pdf (accessed on 27 October 2022).
- GPS: The Global Positioning System. Available online: https://www.gps.gov/ (accessed on 27 October 2022).
- About GLONASS. Available online: https://www.glonass-iac.ru/en/about_glonass/ (accessed on 27 October 2022).
- GALILEO|European Global Navigation Satellite System. Available online: https://galileognss.eu/ (accessed on 27 October 2022).
- Galileo High Accuracy Service (HAS). Available online: https://www.gsc-europa.eu/galileo/services/galileo-high-accuracy-service-has (accessed on 27 October 2022).
- Galileo Public Regulated Service (PRS). Available online: https://www.euspa.europa.eu/european-space/galileo/services/prs (accessed on 27 October 2022).
- 25 × 25 mm 1200TVL CMOS 2.1 mm 2.5 mm 2.8 mm 3.6 mm 130/120 Degree FPV Camera 16:9 PAL NTSC 5V-12V for FPV Racing Drones DIY Parts. Available online: https://www.amazon.co.uk/25X25mm-1200TVL-2-1mm-Degree-Camera/dp/B0B5SHLP52 (accessed on 27 October 2022).
- 2000 mW VTX FX2-Dominator. Available online: https://www.akktek.com/fx2-dominator.html (accessed on 27 October 2022).
- AKK LR2 5.8G 5DBi RHCP FPV High Gain Four Leaf Clover Antenna for TX/RX SMA Male Antenna. Available online: https://www.amazon.com/-/es/cuatro-tr%C3%A9bol-Tr%C3%A9bol-Antena-Ganancia/dp/B01M35T3Q3?language=en_US (accessed on 27 October 2022).
- 802.11ac Encryption Upgrade. Available online: https://framebyframewifi.net/2016/08/02/802-11ac-encryption-upgrade/ (accessed on 27 October 2022).
- EV800D FPV Goggles with DVR 5.8G 40CH 5 Inch 800x480 Diversity Video Headset Build in 3.7 V 2000 mAh Battery. Available online: https://www.amazon.com/Goggles-800x480-Diversity-Headset-2000mAh/dp/B08ZXQW67F (accessed on 27 October 2022).
- FrSky Taranis Q X7 2.4 Ghz 24CH ACCESS. Available online: https://rc-innovations.es/shop/Frsky-Taranis-Q-X7-access-2-4ghz-24ch-negra#attr=7145 (accessed on 27 October 2022).
- Welcome to OpenTX. Available online: http://www.open-tx.org/ (accessed on 27 October 2022).
- TBS-Micro Transmitter Crossfire V2. Available online: https://maxterdrone.com/es/modulos-de-radio/703-tbs-crossfire-micro-tx-0741587433040.html (accessed on 27 October 2022).
- CrossFire Nano Rx. Available online: https://maxterdrone.com/es/receptores/749-tbs-crossfire-nano-rx-se-0741587426158.html (accessed on 27 October 2022).
- Mission Planner Home. Available online: https://ardupilot.org/planner/ (accessed on 28 October 2022).
- ArduPilot—Versatile, Trusted, Open. Available online: https://ardupilot.org/ (accessed on 28 October 2022).
- Introduction—MAVLink Developer Guide. Available online: https://mavlink.io/en/ (accessed on 28 October 2022).
- What is IPFS? Available online: https://docs.ipfs.tech/concepts/what-is-ipfs/ (accessed on 28 October 2022).
- Operating System Images. Available online: https://www.raspberrypi.com/software/operating-systems/ (accessed on 28 October 2022).
- Diccionario Panhispánico del Español Jurídico (Spanish). Available online: https://dpej.rae.es/lema/pedan%C3%ADa (accessed on 28 October 2022).
- Public Gateway Cache Website for IPFS. Available online: https://natoboram.gitlab.io/public-gateway-cacher/ (accessed on 28 October 2022).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Advantages | Disadvantages |
|---|---|---|
| [10] | Usage of algorithms to determine accurate livestock positions. | Security, or tailoring a UAV for the scope of the paper is not considered. |
| [11] | Profuse data processing used, usage of mobile application. | No security considered. Different scope from the one put forward in our paper. |
| [12] | UAVs used for livestock guidance. Movement modeling. | No security is taken into account in the paper. No usage of specific UAV. |
| [13] | IoT-based, reliable deployment of technologies. | No security is evaluated in the paper. UAV as a closed solution. |
| [15] | Real-world development oriented to cattle monitoring in the countryside. | No security considerations. Commercial UAV rather than tailored solution. |
| [16] | Usage of Unmanned Aerial Systems for cattle monitoring in the countryside. | No security considerations in the paper. No usage of tailored UAV. |
| [17] | UAV built from scratch with the purpose of livestock monitoring. | No information about how to secure data or how to create a secure infrastructure. |
| [18] | Experiments proving that UAVs can be used for livestock monitoring. | Secure framework or UAV building are out of the scope of the paper. |
| [19] | Development of the concept of a Flying Ad hoc Network for livestock monitoring. | No security framework is taken into consideration. No specific UAV building. |
| [20] | Usage of Convolutional Neural Network (CNN) for cattle counting purposes | Scope of the manuscript does not consider security frameworks or UAV tailoring |
| [21] | Usage of Deep Learning for visual localization and individual identification | UAV preparation for livestock monitoring is not considered. No security. |
| [23] | UAVs are used for measurement of specific parameter (spatial proximity) | Security components have not been described, nor any kind of framework. |
| Open Issue | Proposed Solution | Means Used for the Solution |
|---|---|---|
| Lack of focus on cybersecurity implementation | Incorporating components and protocols with security capabilities | Usage of security-enabled wireless communication protocols, blockchain and IPFS for data distribution |
| Lack of UAV tailoring for the purpose of cattle monitoring | Building the UAV used from scratch according to the application domain needs. | Usage of components that enable FPV within the range of kilometers |
| Lack of description in hardware and software component interweaving and integration | Usage of components that can be described without difficulty | Description of the subsystems and the components that have been implemented/mounted to create them. |
| State of the Art Proposal | Disadvantages | Proposed Solution |
|---|---|---|
| [10] | Security, or tailoring a UAV for the scope of the paper is not considered. | Tailored UAV and security measures added from design and protocol usage. |
| [11] | No security considered. Different scope from the one put forward in our paper. | Security measures added from design and protocol usage. |
| [12] | No security is taken into account in the paper. No usage of specific UAV. | Specific UAV and security measures added from design and protocol usage. |
| [13] | No security is evaluated in the paper. UAV as a closed solution. | Tailored UAV and security measures added from design and protocol usage. |
| [15] | No security considerations. Commercial UAV rather than tailored solution. | Tailored UAV and security measures added from design and protocol usage. |
| [16] | No security considerations in the paper. No usage of tailored UAV. | Tailored UAV and security measures added from design and protocol usage. |
| [17] | No information about how to secure data or how to create a secure infrastructure. | Data about hardware and software components enhanced with security. |
| [18] | Secure framework or UAV building are out of the scope of the paper. | Tailored UAV and security measures added from design and protocol usage. |
| [19] | No security framework is taken into consideration. No specific UAV building. | Tailored UAV and security measures added from design and protocol usage. |
| [20] | Scope of the manuscript does not consider security frameworks or UAV tailoring | Tailored UAV and security measures added from design and protocol usage |
| [21] | UAV preparation for livestock monitoring is not considered. No security. | Tailored UAV and security measures added from design and protocol usage. |
| [23] | Security components have not been described, nor any kind of framework. | Security measures added from design and protocol usage. |
| Requirement Number | Description | Purpose |
|---|---|---|
| Functional Requirement 1 (FR1) | The UAV will FLY over cattle with as little disturbance as possible. | Basic functionality expected for cattle monitoring. |
| Functional Requirement 2 (FR2) | The UAV will HOVER over cattle with as little disturbance as possible. | Basic functionality expected for cattle monitoring. |
| Functional Requirement 3 (FR3) | The UAV will perform missions in a GUIDED manner. | Ability to monitor cattle as the main task. |
| Functional Requirement 4 (FR4) | The UAV will perform missions in an AUTONOMOUS manner. | Ability to ease the farmer from constant monitoring tasks. |
| Functional Requirement 5 (FR5) | The UAV will transmit information as REAL-TIME DATA. | Instant information about livestock movement and location can be obtained. |
| Functional Requirement 6 (FR6) | The UAV will STORE DATA as part of the information collected. | Ability to have data saved for future processing and/or knowledge inference |
| Functional Requirement 7 (FR7) | Data will be SHARED among relevant parties participating in the system | Ability to share information among different entities in a reliable, trustless manner |
| Requirement Number | Description | Purpose |
|---|---|---|
| Non-Functional Requirement 1 (NFR1) | Security measures must be present in the UAV hardware. | The UAV must not be hijacked or tampered with in any way. |
| Non-Functional Requirement 2 (NFR2) | Security measures must be present in the software. | The data collected from the UAV must not be tampered with in any way. |
| Non-Functional Requirement 3 (NFR3) | Communications range must be of at least 5 milometers long. | The UAV must be able to fly through the countryside with no restraint for monitoring. |
| Non-Functional Requirement 4 (NFR4) | Mission length must be of at least 15 min. | The UAV must have enough battery autonomy to perform monitoring missions. |
| Non-Functional Requirement 5 (NFR5) | UAV must have components that can be repaired in situ. | The UAV must be repaired without significant aid from outside monitoring space. |
| Non-Functional Requirement 6 (NFR6) | UAV and missions must be compliant with current legislation. | The UAV deployment and data gathering must respect existing legislation. |
| Non-Functional Requirement 7 (NFR7) | Data must be shareable among interested parties in a reliable manner | Information will be provided in a transparent way to any party providing perks |
| Non-Functional Requirement 8 (NFR8) | Data must be transferred in a secure manner through the system | Hardware and software components used will provide security measures |
| Requirement Number | Description | Fulfillment |
|---|---|---|
| Functional Requirement 1 (FR1) | The UAV will FLY over cattle with as little disturbance as possible. | Frame, Controller, Motors, RC components, ESCs, Battery |
| Functional Requirement 2 (FR2) | The UAV will HOVER over cattle with as little disturbance as possible. | Frame, Controller, Motors, RC components, ESCs, Battery |
| Functional Requirement 3 (FR3) | The UAV will perform missions in a GUIDED manner. | Frame, Controller, Motors, RC components, Radio Control Systems, ESCs, Battery |
| Functional Requirement 4 (FR4) | The UAV will perform missions in an AUTONOMOUS manner. | Frame, Controller, Motors, RC components, Radio Control Systems, ESCs, Finder, Battery |
| Functional Requirement 5 (FR5) | The UAV will transmit information as REAL-TIME DATA. | Frame, Controller, Motors, RC components, Video Transmission System, Radio Control Systems, ESCs, Finder, Battery |
| Functional Requirement 6 (FR6) | The UAV will STORE DATA as part of the information collected. | Not Applicable. Fulfilled by IPFS and blockchain nodes |
| Non-Functional Requirement 1 (NFR1) | Security measures must be present in the UAV hardware. | Controller, RC components, Video Transmission System, Radio Control Systems |
| Non-Functional Requirement 2 (NFR2) | Security measures must be present in the software. | Not Applicable. Fulfilled by IPFS and blockchain nodes |
| Non-Functional Requirement 3 (NFR3) | Communications range must be of at least 5 milometers long. | RC components, Video Transmission System, Radio Control Systems |
| Non-Functional Requirement 4 (NFR4) | Mission length must be of at least 15 min. | Battery |
| Non-Functional Requirement 5 (NFR5) | UAV must have components that can be repaired in situ. | Frame, Controller, Motors, RC components, Radio Control Systems, ESCs, Battery |
| Non-Functional Requirement 6 (NFR6) | UAV and missions must be compliant with current legislation. | Frame, Controller, Motors, RC components, Radio Control Systems, ESCs, Battery |
| Security Threat | Countermeasure |
|---|---|
| Command monitoring | Data encrypted by means of the wireless communication of choice |
| Command spoofing | Data encrypted by means of the wireless communication of choice |
| Denial of Service | Distributed data storage. Encrypted wireless communications. |
| Distributed Denial of Service | Distributed data storage. Encrypted wireless communications |
| Data Tampering | Distributed data storage |
| UAV hijacking | Secured wireless connection. Security in previous data flow stages |
| CGS credentials exposure | Credentials periodic update. Strengthening mechanisms for providing credentials |
| Experiment Performed | Expected Result | Obtained Result. Deviations |
|---|---|---|
| UAV flight over flat terrain. | Flight where UAV will show its performance. | Regular flight where UAV behaved accordingly. |
| UAV flight over hilly/rocky terrain. | Flight where UAV will show its performance. | Regular UAV flight, but it had unsatisfactory landing. |
| UAV flight over cattle. | Flight where the UAV will be used to monitor cattle from a certain altitude. | Regular flight where UAV behaved accordingly. |
| UAV shepherd-like flight. | Flight where the UAV will be used to group cattle. | Cattle and UAV behaved accordingly. Likely to reduce effectiveness over time. |
| Data collection from UAV. | Images obtained from the UAV flight. | Images obtained from the UAV flight. |
| Data sharing via blockchain. | Data will be incorporated onto a tailored blockchain. | Data was incorporated onto a tailored blockchain. |
| Data sharing via IPFS. | Data will be shared among IPFS network participants. | Data was added to the IPFS network. Caching information was used. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ortega, J.C.Ú.; Rodríguez-Molina, J.; Martínez-Núñez, M.; Garbajosa, J. A Proposal for Decentralized and Secured Data Collection from Unmanned Aerial Vehicles in Livestock Monitoring with Blockchain and IPFS. Appl. Sci. 2023, 13, 471. https://doi.org/10.3390/app13010471
Ortega JCÚ, Rodríguez-Molina J, Martínez-Núñez M, Garbajosa J. A Proposal for Decentralized and Secured Data Collection from Unmanned Aerial Vehicles in Livestock Monitoring with Blockchain and IPFS. Applied Sciences. 2023; 13(1):471. https://doi.org/10.3390/app13010471
Chicago/Turabian StyleOrtega, Julio César Úbeda, Jesús Rodríguez-Molina, Margarita Martínez-Núñez, and Juan Garbajosa. 2023. "A Proposal for Decentralized and Secured Data Collection from Unmanned Aerial Vehicles in Livestock Monitoring with Blockchain and IPFS" Applied Sciences 13, no. 1: 471. https://doi.org/10.3390/app13010471