
Application of Microtremor Survey Technology in a Coal Mine Goaf

Abstract
:1. Introduction
2. Principle of Microtremor Exploration
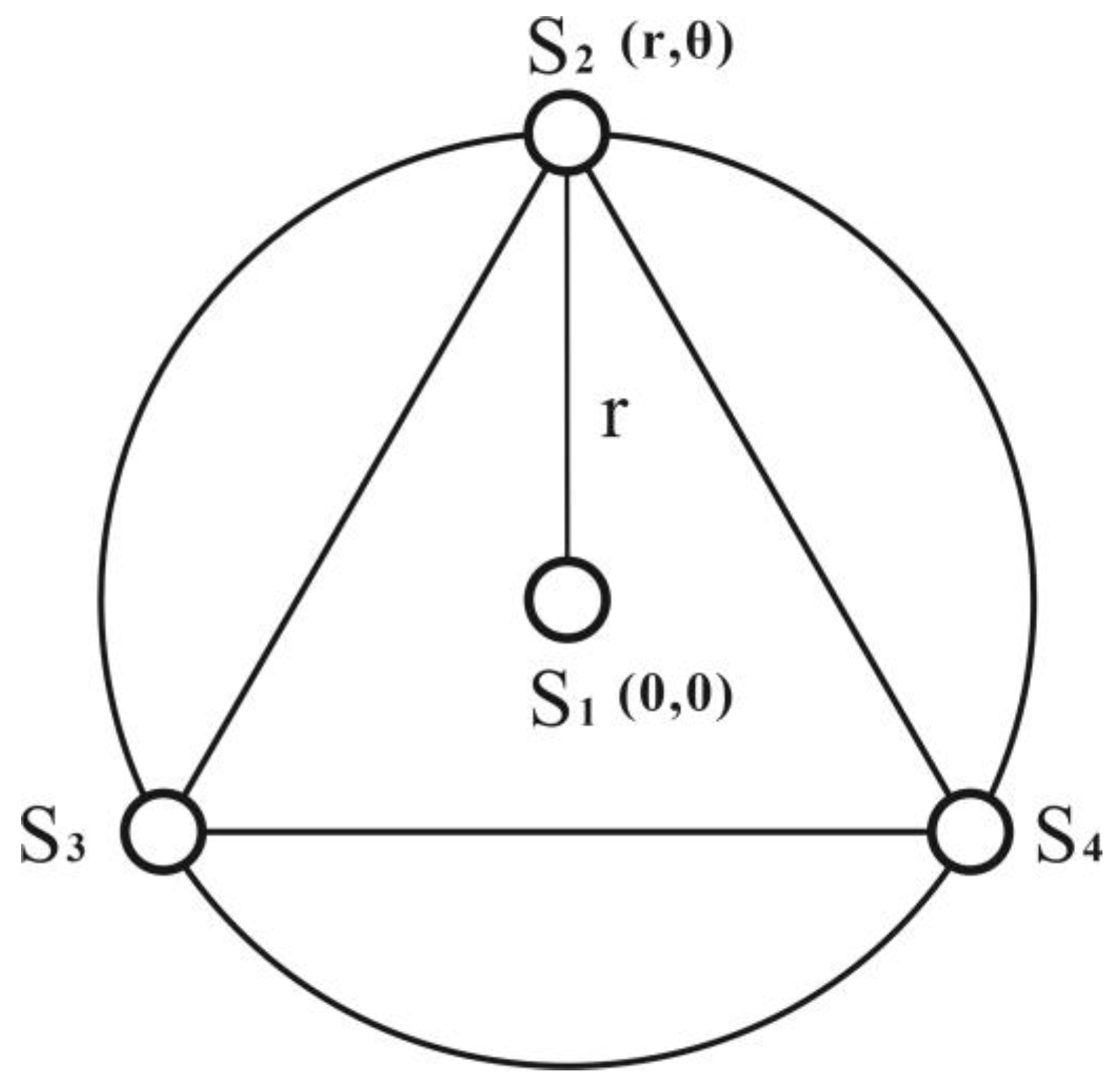
2.1. SPAC
2.2. ESPAC
2.3. F-K
3. Methodology
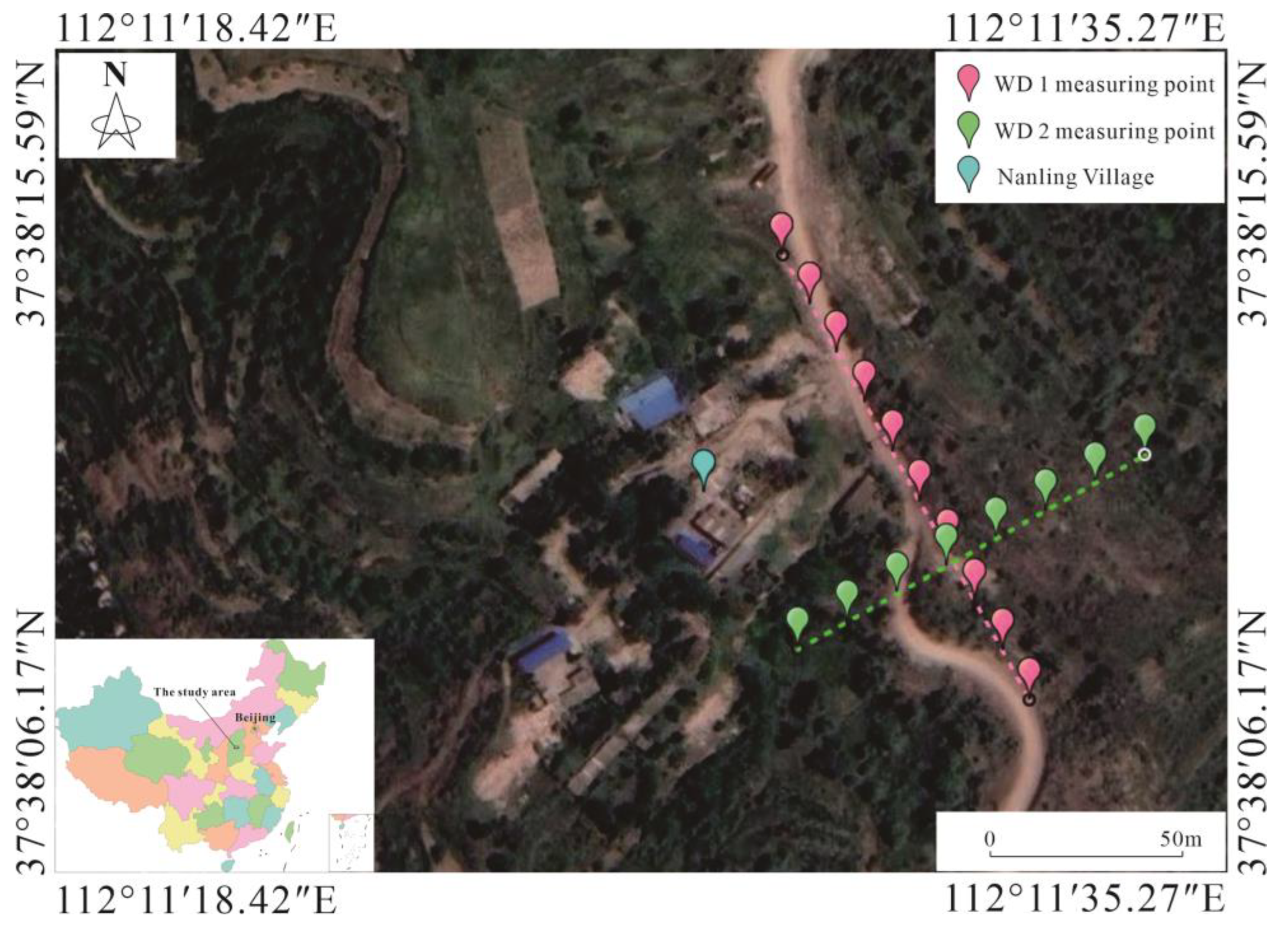
3.1. Survey Area Overview
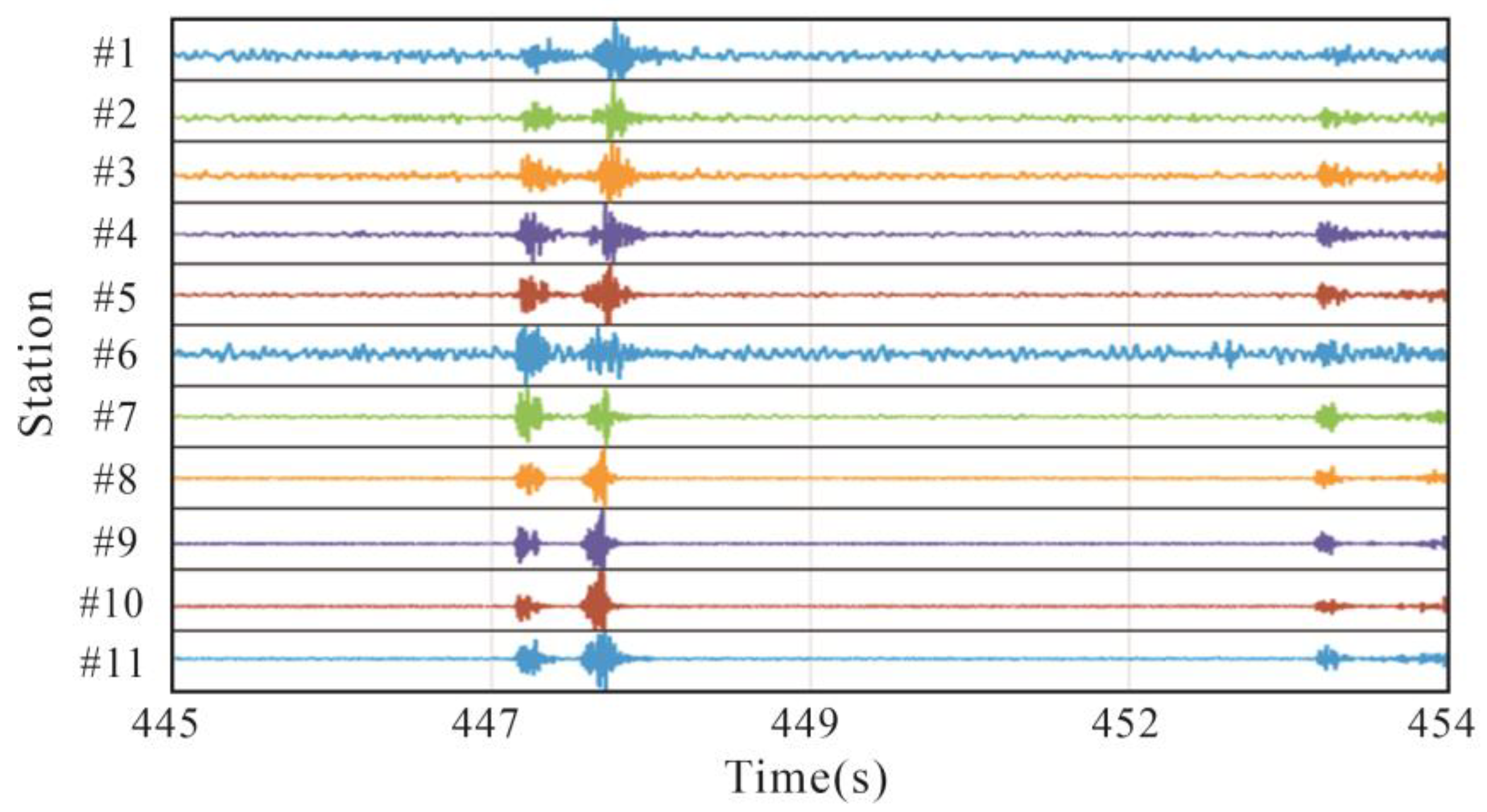
3.2. Instrument Consistency Test
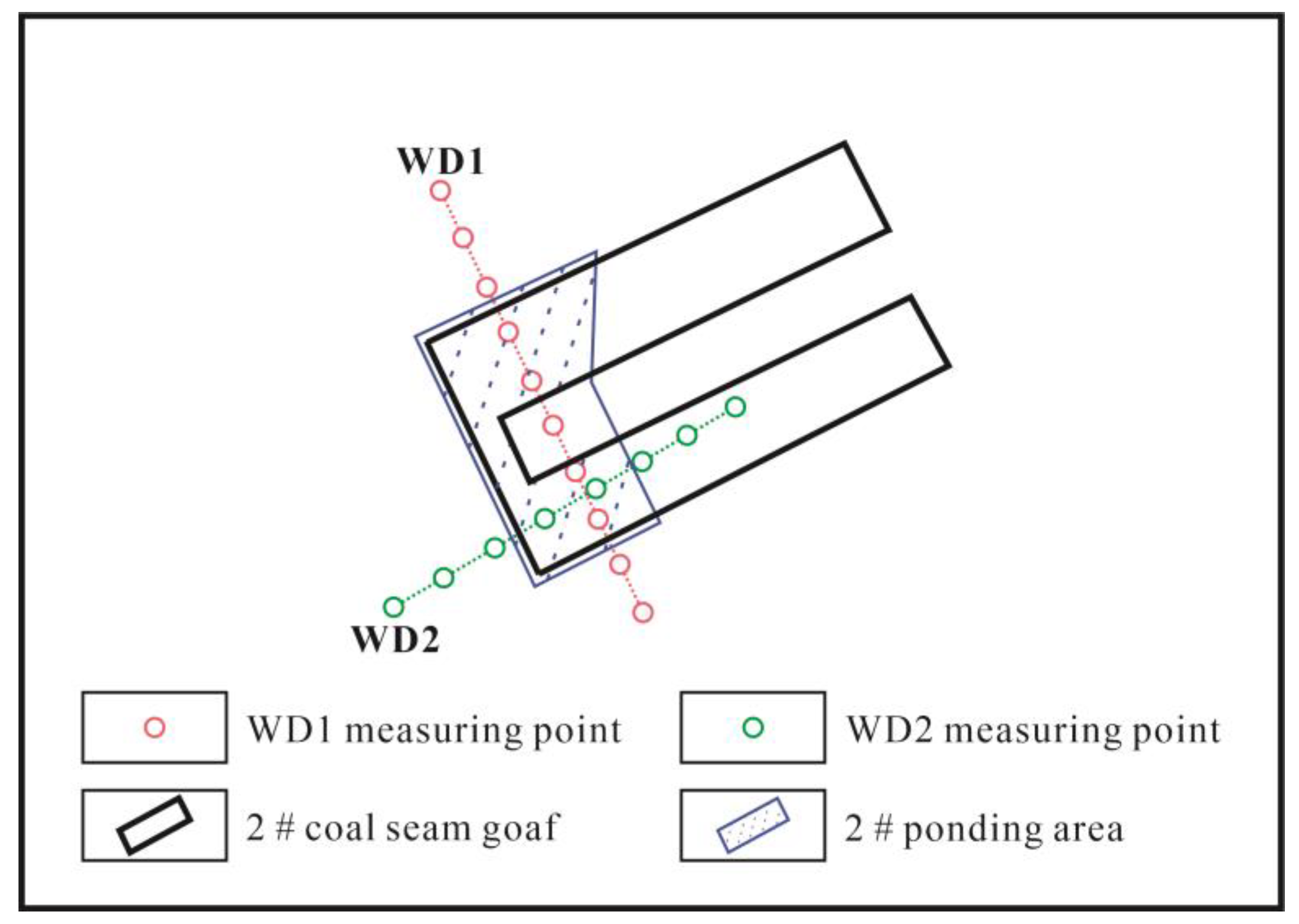
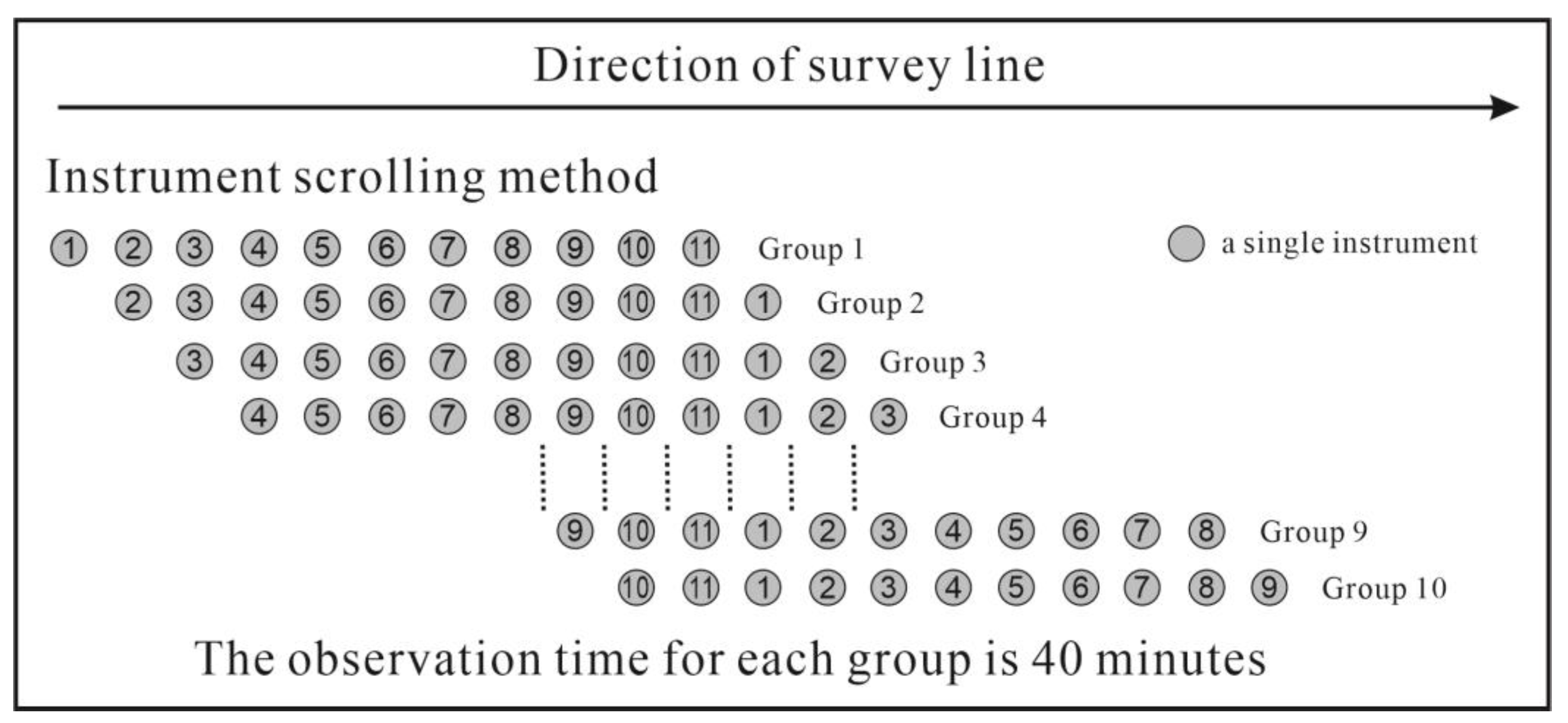
3.3. Array Layout
3.4. Data Acquisition
4. Results and Discussion
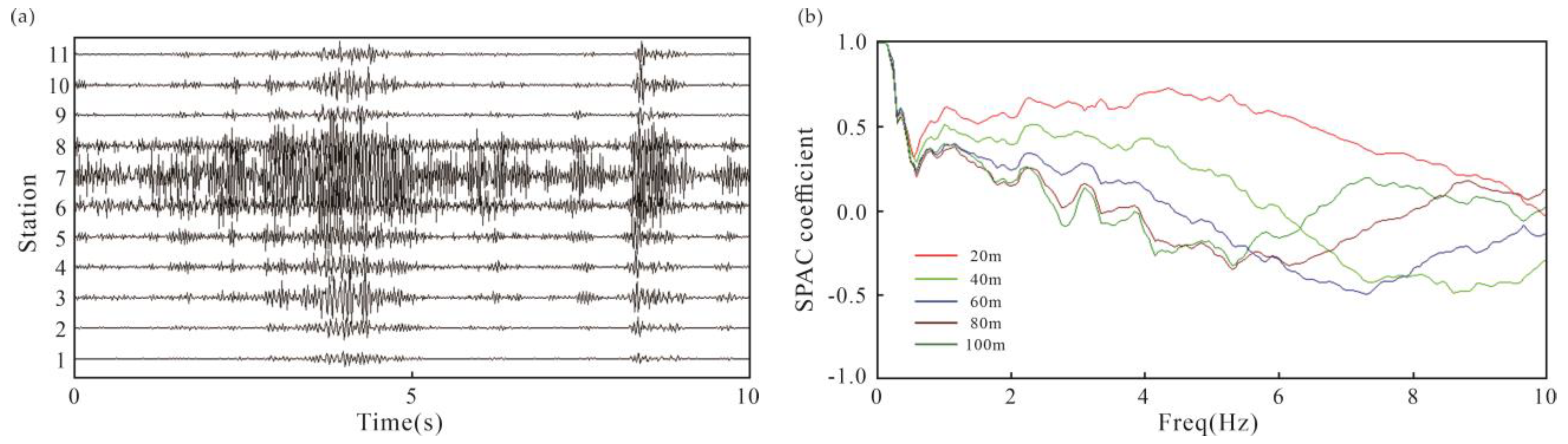
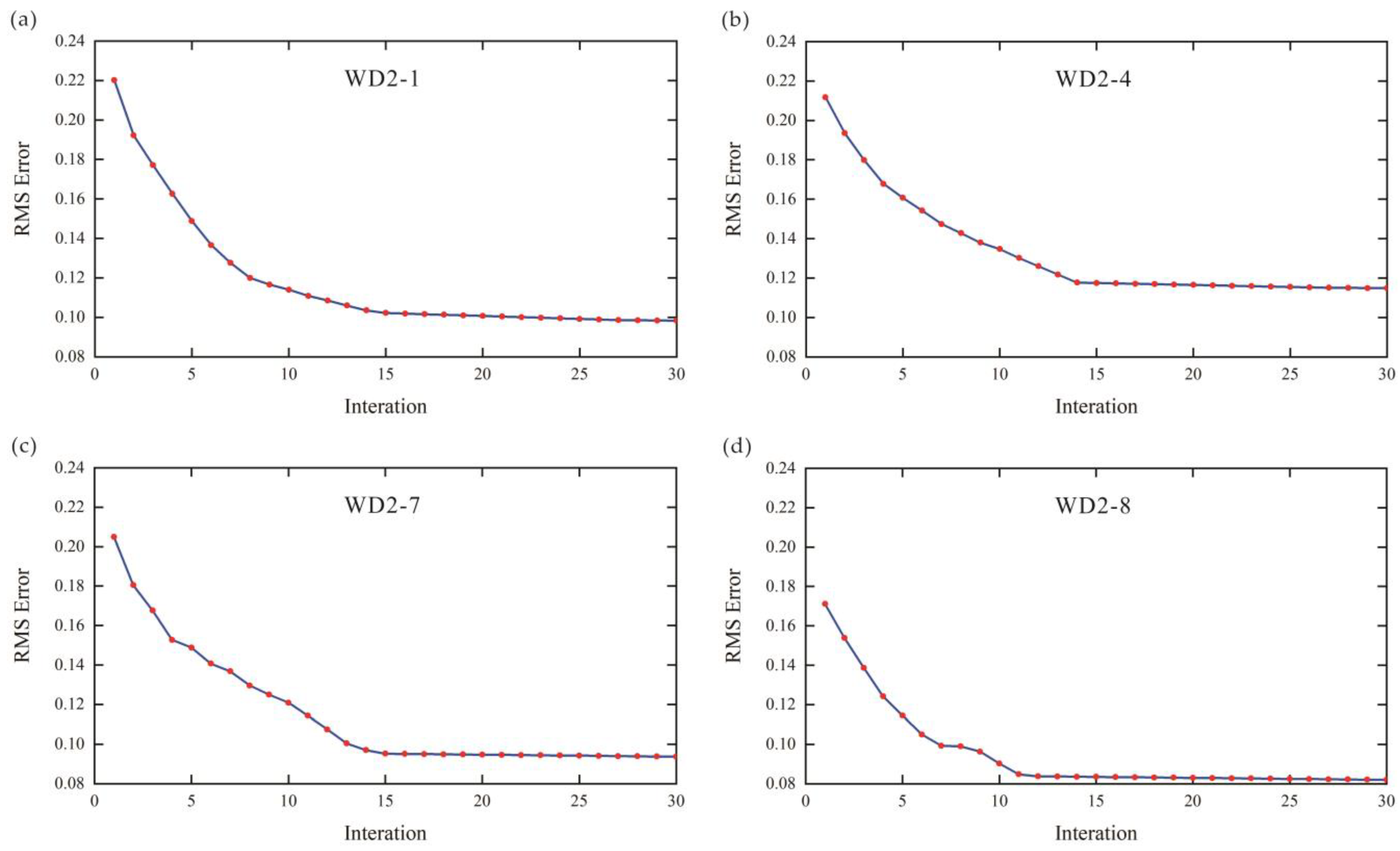
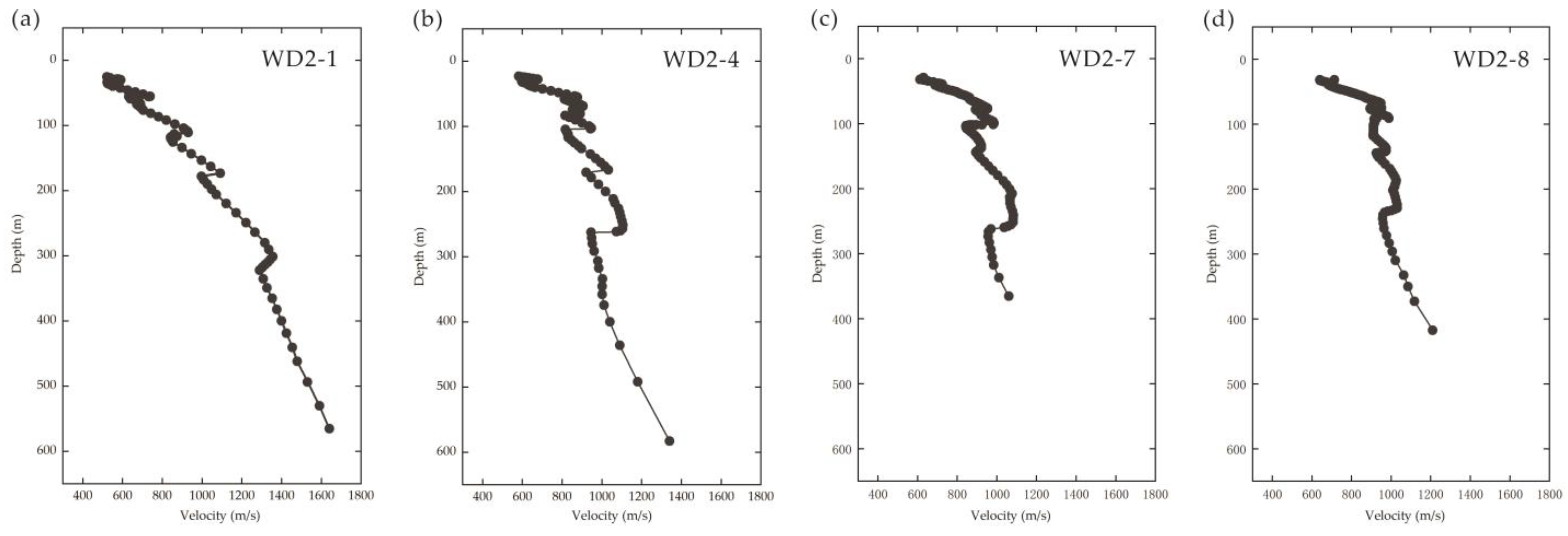
4.1. Data Processing Flow
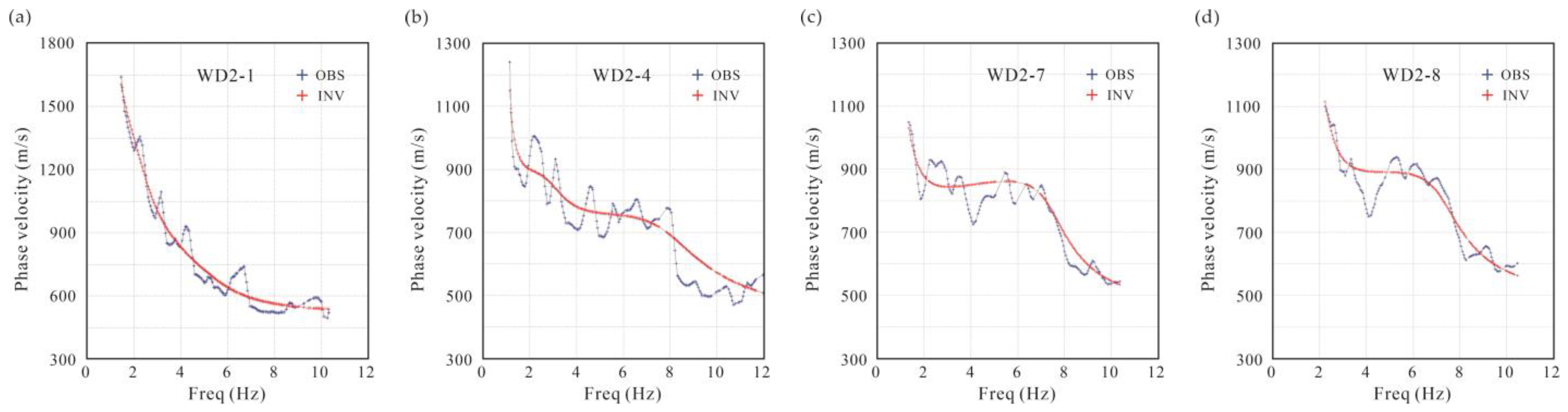
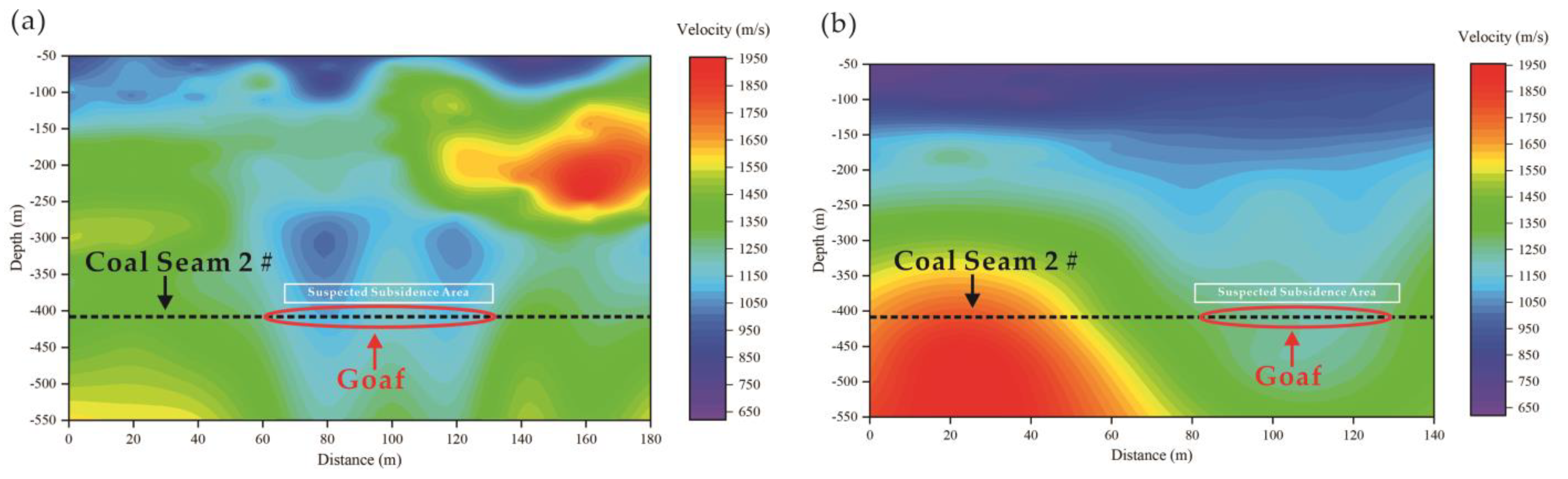
4.2. Interpretation of Achievements
5. Conclusions
- When a linear array is selected for microtremor exploration, If the number of acquisition stations cannot meet the requirements of one-time data observation, we can choose to deploy the linear array to collect data using rolling acquisition, so that the work efficiency can be greatly improved by reusing the data.
- Microtremor exploration is less affected by the environment, and the construction is simple and flexible. It is useful for field work, and the shallow strata are depicted more finely, which can make up for the shortcomings of other geophysical methods in shallow resolution.
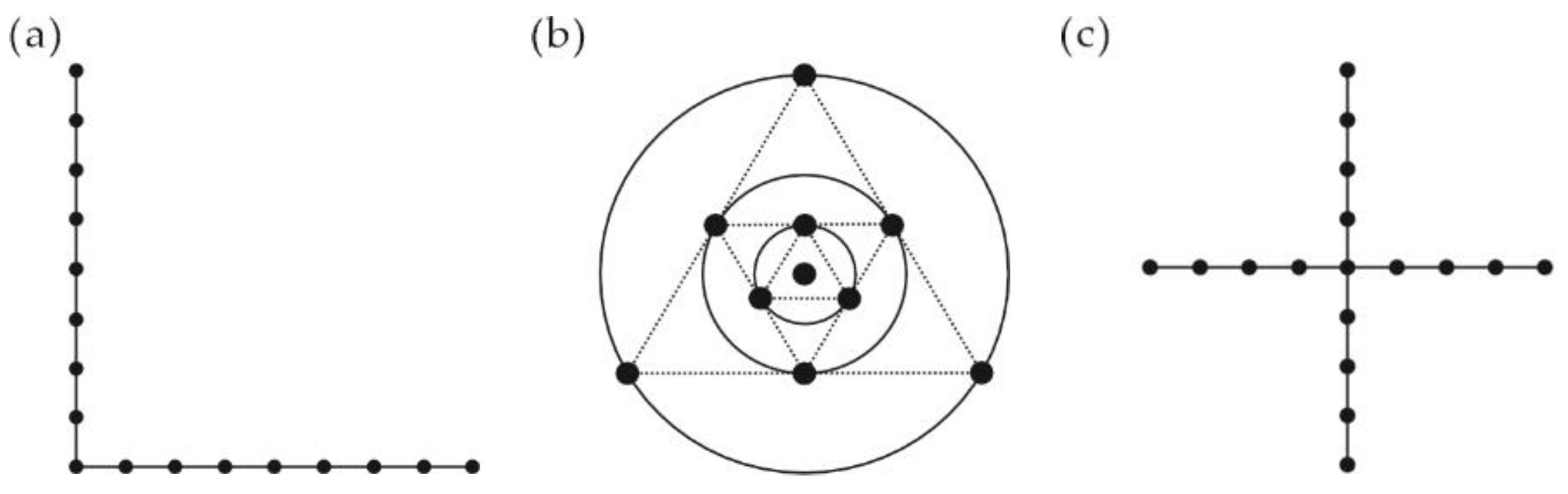
- The layout of the microarray also includes a nested equilateral triangle and circular array. These two arrays require wide site conditions in the target area, but these two methods are not applicable to the topographic conditions of our experimental exploration area. The linear array and rolling acquisition method used in this study are suitable for use in poor terrain, which can shorten the time taken for array layout and improve construction efficiency, while ensuring the exploration effect. The shallow resolution of linear array is inferior to that of a nested equilateral triangle array and circular array. The layout of the array should also consider the site conditions in the construction area.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xue, G.Q.; Cheng, J.L.; Zhou, N.N.; Chen, W.Y.; Li, H. Detection and monitoring of water-filled voids using transient electromagnetic method: A case study in Shanxi, China. Environ. Earth Sci. 2013, 70, 2263–2270. [Google Scholar] [CrossRef]
- Qin, S.; Cheng, J.Y.; Hu, J.W.; Wu, H. Coal-seam-ground-seismic for advance detection of goaf and roadway. J. China Coal Soc. 2015, 40, 636–639. [Google Scholar]
- Cai, G.T.; Sui, W.H.; Wu, S.L.; Wang, J.L.; Chen, J.X. On-Site Monitoring for the Stability Evaluation of a Highway Tunnel above Goaves of Multi-Layer Coal Seams. Appl. Sci. 2021, 11, 7383. [Google Scholar] [CrossRef]
- Xv, X.C.; Chen, W.D.; Liu, W. Application of ground-penetrating radar and high-density electromagnetic method to prospecting obsolete mine. Rock Soil Mech. 2002, 23, 126–128. [Google Scholar]
- Keiiti, A. Space and time spectra of stationary stochastic waves, with special reference to microtremors. Bull. Earthq. Res. Inst. 1957, 35, 415–456. [Google Scholar]
- Capon, J. High-resolution frequency-wavenumber spectrum analysis. Proc. IEEE 1969, 57, 1408–1418. [Google Scholar] [CrossRef] [Green Version]
- Okada, H. The Microtremor Survey Method; Society of Exploration Geophysicists: Tokyo, Japan, 2003; pp. 76–77. [Google Scholar]
- Ohori, M.; Nobata, A.; Wakamatsu, K. A Comparison of ESAC and FK Methods of Estimating Phase Velocity Using Arbitrarily Shaped Microtremor Arrays. Bull. Seismol. Soc. Am. 2002, 92, 2323–2332. [Google Scholar] [CrossRef]
- Fen, S.K. Array Microtremor Survey and Its Application to Civil Engineering. Chin. J. Rock Mech. Eng. 2003, 6, 1029–1036. [Google Scholar]
- Ye, T.L. The Exploration Technique for Microtremor Array and Its Application. Earthq. Res. China 2004, 20, 47–52. [Google Scholar]
- Xu, P.F.; Li, S.H.; Du, J.G.; Ling, S.Q.; Guo, H.L.; Tian, B.Q. Microtremor survey method: A new geophysical method for dividing strata and detecting the buried fault structures. Acta Petrol. Sin. 2013, 29, 1841–1845. [Google Scholar]
- Tian, B.Q.; Xu, P.F.; Ling, S.Q.; Du, J.G.; Xu, X.Q.; Pang, Z.H. Application effectiveness of the microtremor survey method in the exploration of geothermal resources. J. Geophys. Eng. 2017, 14, 1283–1289. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.C.; Shih, T.H.; Hsu, C.T.; Wu, C.F. Estimation of Shear-Wave Velocity Structures in Taichung, Taiwan, Using Array Measurements of Microtremors. Appl. Sci. 2022, 12, 170. [Google Scholar] [CrossRef]
- Ma, G.S. Mapping water-rich goaf utilizing microtremor survey methods. Prog. Geophys. 2022, 37, 1292–1300. [Google Scholar]
- Xu, P.F.; Li, S.H.; Ling, S.Q.; Guo, H.L.; Tian, B.Q. Application of SPAC method to estimate the crustal S-wave velocity structure. Chin. J. Geophys. 2013, 56, 3846–3854. [Google Scholar]
- Xu, P.F.; Ling, S.Q.; Li, C.J.; Du, J.G.; Zhang, D.M.; Xu, X.Q.; Dai, K.M.; Zhang, Z.H. Mapping deeply-buried geothermal faults using microtremor array analysis. Geophys. J. Int. 2012, 188, 115–122. [Google Scholar] [CrossRef]
- Ling, S.; Okada, H. An Extended Use of the Spatial Autocorrelation Method for the Estimation of Geological Structure Using Microtremors. In Proceedings of the 89th SEGJ Conference, Nendo Shuki, Japan, 12–14 October 1993. [Google Scholar]
- Liao, C.W.; Deng, T.; Ding, W.; Wang, H.; Tan, Y.Y.; Chen, W.M. On positioning way for array microtremor observation. J. Geod. Geodyn. 2007, 27, 61–64. [Google Scholar]
- Li, N.; He, Z.Q.; Ye, T.L.; Fang, S.C. Test for comparison of array layout in natural source surface wave exploration. Acta Seismol. 2015, 37, 323–334+370. [Google Scholar]
- Zhou, Z.Y.; Liao, W.L.; Li, J.G. Microtremor Survey Method Linear Array Rapid Processing. J. Geod. Geodyn. 2020, 40, 1097–1100. [Google Scholar]
- Nagai, K.; O’neill, A.; Sanada, Y.; Ashida, Y. Genetic Algorithm Inversion of Rayleigh Wave Dispersion from CMPCC Gathers Over a Shallow Fault Model. J. Environ. Eng. Geophys. 2005, 10, 275–286. [Google Scholar] [CrossRef]
- Zhang, B.X.; Xiao, B.X.; Yang, W.J.; Cao, S.Y.; Mou, Y.G. Mechanism of zigzag dispersion curves in Rayleigh exploration and its inversion study. Chin. J. Geophys. 2000, 43, 557–567. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Specifications |
|---|---|
| Natural frequency | 2 Hz |
| Sensitivity | 260 V/m/s |
| Frequency response range | 0.1~1600 Hz |
| Open-circuit damping coefficient | 0.7 |
| Coil impedance | 6400 Ω |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, C.; Wang, Z.; Tang, M. Application of Microtremor Survey Technology in a Coal Mine Goaf. Appl. Sci. 2023, 13, 466. https://doi.org/10.3390/app13010466
Yu C, Wang Z, Tang M. Application of Microtremor Survey Technology in a Coal Mine Goaf. Applied Sciences. 2023; 13(1):466. https://doi.org/10.3390/app13010466
Chicago/Turabian StyleYu, Chuantao, Zheng Wang, and Mingyu Tang. 2023. "Application of Microtremor Survey Technology in a Coal Mine Goaf" Applied Sciences 13, no. 1: 466. https://doi.org/10.3390/app13010466