

Dynamics Analysis and Chaos Identification of Compound Pendulum Jaw Crusher with Joint Clearance

Abstract
:1. Introduction
2. Clearance Model
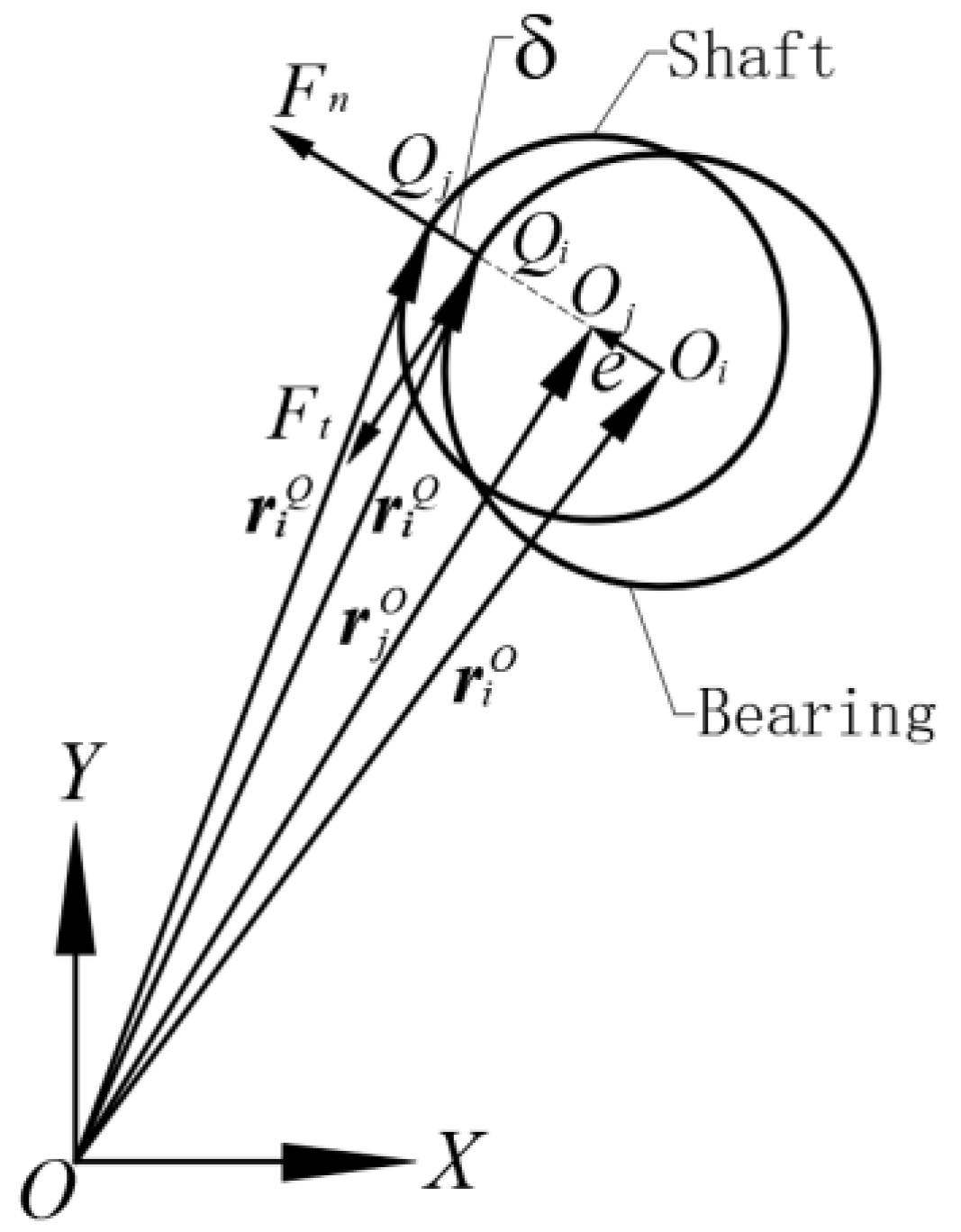
2.1. Revolute Joint Model with Clearance
2.2. Contact Force Model
2.3. Friction Force Model
3. Dynamic Modeling
4. Validation Analysis
4.1. Validation of Dynamical Model
- (1)
- Errors in the structural parameters of the virtual prototype. Adams is deficient in modeling capability, so a 3D model of the crusher is built in SOLIDWORKS and imported into Adams, while some structural simplifications are made to the model, such as merging the bearing rollers of the eccentric shaft and thickening the revolute joint where the elbow plate is connected to the moveable jaw, resulting in minor changes in mass, volume and other parameters.
- (2)
- The difference between the two solution methods. The normal contact force model and the tangential friction force model in the dynamic model are not fully consistent with the mechanical model in Adams. In Adams, the collision forces between the components are defined using the Contact tool. The normal contact force is calculated by the Impact function in the function library, and the tangential friction force is calculated by the Coulomb friction model.
4.2. Validation of Influence Parameters
5. Analysis of Dynamic Performance
5.1. Influence of Driving Speed
5.2. Influence of Clearance Size
5.3. Influence of Driving Speed and Clearance Size
6. Conclusions
- Comparative simulations in MATLAB and Adams verify the correctness of the clearance mechanism modeling method and solution method, which provides a reference for the research on the dynamics of crushers with clearance.
- The dynamic simulation analysis verifies that the existence of clearance leads to significant oscillations in the vibration forces, which seriously affect the service life of the foundations. A larger driving speed and a smaller clearance size can be beneficial to reduce the shock and chaos phenomenon during the operation of the mechanism, reduce the influence of the clearance on the vibration force applied to the foundation, and improve the stability of the mechanism operation.
- Analysis of the combined effect of driving speed and clearance size shows that the optimal combination of 39 rad/s and 0.03 mm reduces the peak vibration force by 48.6% while meeting the crusher production capacity.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Barrios, G.K.; Jiménez-Herrera, N.; Fuentes-Torres, S.N.; Tavares, L.M. DEM Simulation of Laboratory-Scale Jaw Crushing of a Gold-Bearing Ore Using a Particle Replacement Model. Minerals 2020, 10, 717. [Google Scholar] [CrossRef]
- Deniz, V. A Study on the Effects of Coal Feed Size and Coal Type on the Performance of a Laboratory Jaw Crusher. Energy Sources Part A 2014, 36, 1249–1255. [Google Scholar] [CrossRef]
- Ulsen, C.; Tseng, E.; Angulo, S.C.; Landmann, M.; Contessotto, R.; Balbo, J.T.; Kahn, H. Concrete Aggregates Properties Crushed by Jaw and Impact Secondary Crushing. J. Mater. Res. Technol. 2019, 8, 494–502. [Google Scholar] [CrossRef]
- Osanloo, M.; Paricheh, M. In-pit Crushing and Conveying Technology in Open-pit Mining Operations: A Literature Review and Research Agenda. Int. J. Min. Reclam. Environ. 2020, 34, 430–457. [Google Scholar] [CrossRef]
- Lapin, S.K. Vibration Insulation for Jaw Crushers—An Effective Means of Reducing Bed and Foundation Deformations. Soil Mech. Found. Eng. 2000, 37, 198–201. [Google Scholar] [CrossRef]
- Yang, C.L.; Huang, D.M.; Xiong, J.F.; Liu, X.H. The Weight Reduction Optimization of Jaw Crusher about Moving Jaw Based on Parametric Finite Element Analysis. In Proceedings of the 1st International Workshop on Hydraulic Equipment and Support Systems for Mining (IWHEM 2012), Huludao, China, 17–18 August 2012; p. 275. [Google Scholar]
- Li, Z.; Chen, W.; Zhang, W.; Zhang, X.; Wen, B. Theoretical, Numerical, and Experimental Study on the Synchronization in a Vibrator–pendulum Coupling System. Arch. Civ. Mech. Eng. 2022, 22, 157. [Google Scholar] [CrossRef]
- Cheng, J.; Ren, T.; Zhang, Z.; Jin, X.; Liu, D. Influence of Two Mass Variables on Inertia Cone Crusher Performance and Optimization of Dynamic Balance. Minerals 2021, 11, 163. [Google Scholar] [CrossRef]
- Zhao, Z.; Li, Y.; Li, W.; Zhan, X.; Zhu, X.; Zhong, J. Research on the Biaxial Compound Pendulum Jaw Crusher Based on Seven-bar Mechanism. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 230, 1876–1889. [Google Scholar]
- Wang, X.; Liu, G.; Ma, S. Dynamic Analysis of Planar Mechanical Systems with Clearance Joints Using a New Nonlinear Contact Force Model. J. Mech. Sci. Technol. 2016, 30, 1537–1545. [Google Scholar] [CrossRef]
- Chen, X.; Jiang, S.; Deng, Y.; Wang, Q. Dynamics analysis of 2-DOF complex planar mechanical system with joint clearance and flexible links. Nonlinear Dyn. 2018, 93, 1009–1034. [Google Scholar] [CrossRef]
- Wu, X.; Sun, Y.; Wang, Y.; Chen, Y. Correlation Dimension and Bifurcation Analysis for the Planar Slider-crank Mechanism with Multiple Clearance Joints. Multibody Syst. Dyn. 2021, 52, 95–116. [Google Scholar] [CrossRef]
- Chen, X.; Jia, Y.; Deng, Y.; Wang, Q. Dynamics Behavior Analysis of Parallel Mechanism with Joint Clearance and Flexible Links. Shock Vib. 2018, 2018, 9430267. [Google Scholar] [CrossRef]
- Farahan, S.B.; Ghazavi, M.R.; Rahmanian, S. Bifurcation in a Planar Four-bar Mechanism with Revolute Clearance Joint. Nonlinear Dyn. 2017, 87, 955–973. [Google Scholar] [CrossRef]
- Lankarani, H.M.; Nikravesh, P.E. A Contact Force Model With Hysteresis Damping for Impact Analysis of Multibody Systems. J. Mech. Des. 1990, 112, 369–376. [Google Scholar] [CrossRef]
- Ambrósio, J.A.C. Dynamics of Structures Undergoing Gross Motion and Nonlinear Deformations: A Multibody Approach. Comput. Struct. 1996, 59, 1001–1012. [Google Scholar] [CrossRef]
- Chen, X.; Wang, J. Nonlinear Dynamic Analysis and Experimental Study of Multi-link Press with Dry Friction Clearances of Revolute Joints. Meccanica 2022, 57, 2627–2652. [Google Scholar] [CrossRef]
- Chen, X.; Guo, J. Effects of Spherical Clearance Joint on Dynamics of Redundant Driving Spatial Parallel Mechanism. Robotica 2021, 39, 1064–1080. [Google Scholar] [CrossRef]
- Baumgarte, J. Stabilization of Constraints and Integrals of Motion in Dynamical Systems. Comput. Methods Appl. Mech. Eng. 1972, 1, 1–16. [Google Scholar] [CrossRef]
- Bai, Z.F.; Zhao, Y.; Chen, J. Dynamics Analysis of Planar Mechanical System Considering Revolute Clearance Joint Wear. Tribol. Int. 2013, 64, 85–95. [Google Scholar] [CrossRef]
- Chen, X.; Jiang, D. Design, Kinematics, and Statics of a Novel Wave Energy Converter with Parallel Mechanism. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419876214. [Google Scholar] [CrossRef]
- Zhong, X.; Niu, X.; Ji, Q.; Shen, X. Simulation Analysis of Cavity Shape of Compound Pendulum Jaw Crusher. J. Phys. Conf. Ser. 2020, 1637, 012130. [Google Scholar] [CrossRef]
- Tang, Y.; Chang, Z.; Dong, X.; Hu, Y.; Yu, Z. Nonlinear Dynamics and Analysis of a Four-bar Linkage with Clearance. Front. Mech. Eng. 2013, 8, 160–168. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, G.; Xue, D.; Bi, Q. Simulation and Optimization of Gyratory Crusher Performance Based on the Discrete Element Method. Powder Technol. 2020, 376, 93–103. [Google Scholar] [CrossRef]
- Javanfar, A.; Bamdad, M. Effect of Novel Continuous Friction Model on Nonlinear Dynamics of the Mechanisms with Clearance Joint. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2021, 236, 6040–6052. [Google Scholar] [CrossRef]
- Flores, P.; Ambrosio, J. Revolute Joints with Clearance in Multibody Systems. Comput. Struct. 2004, 82, 1359–1369. [Google Scholar] [CrossRef] [Green Version]
- Bo, S.J.; Guo, R.B.; Zhu, H. Dynamic Study for Working Device of PE-250*400 Crusher. Adv. Mater. Res. 2013, 753–755, 1699–1702. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components * | |||
|---|---|---|---|
| frame 0 | — | 2597 | 0.64 |
| eccentric shaft 1 | 0.2 | 95 | 0.01 |
| moveable jaw 2 | 128.48 | 524 | 0.695 |
| elbow plate 3 | 0.7154 | 22 | 0.3 |
| Parameter | Numerical Value | Parameter | Numerical Value |
|---|---|---|---|
| 1.5 | 207 Gpa | ||
| 0.9 | 0.1 m/s | ||
| 0.29 | 1 m/s | ||
| 0.1 | 8.8 KN | ||
| 20 | 0.5 m/s | ||
| 20 | 22.5° | ||
| 0.13 m | 0° | ||
| 0.006 m | 0.3 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Cui, Y.; Wang, C. Dynamics Analysis and Chaos Identification of Compound Pendulum Jaw Crusher with Joint Clearance. Appl. Sci. 2023, 13, 238. https://doi.org/10.3390/app13010238
Wang S, Cui Y, Wang C. Dynamics Analysis and Chaos Identification of Compound Pendulum Jaw Crusher with Joint Clearance. Applied Sciences. 2023; 13(1):238. https://doi.org/10.3390/app13010238
Chicago/Turabian StyleWang, Shenpeng, Yan Cui, and Chune Wang. 2023. "Dynamics Analysis and Chaos Identification of Compound Pendulum Jaw Crusher with Joint Clearance" Applied Sciences 13, no. 1: 238. https://doi.org/10.3390/app13010238