
Research on the Landslide Prediction Based on the Dual Mutual-Inductance Deep Displacement 3D Measuring Sensor

Abstract
:Featured Application
Abstract
1. Introduction
2. Landslide Experiment Equipment
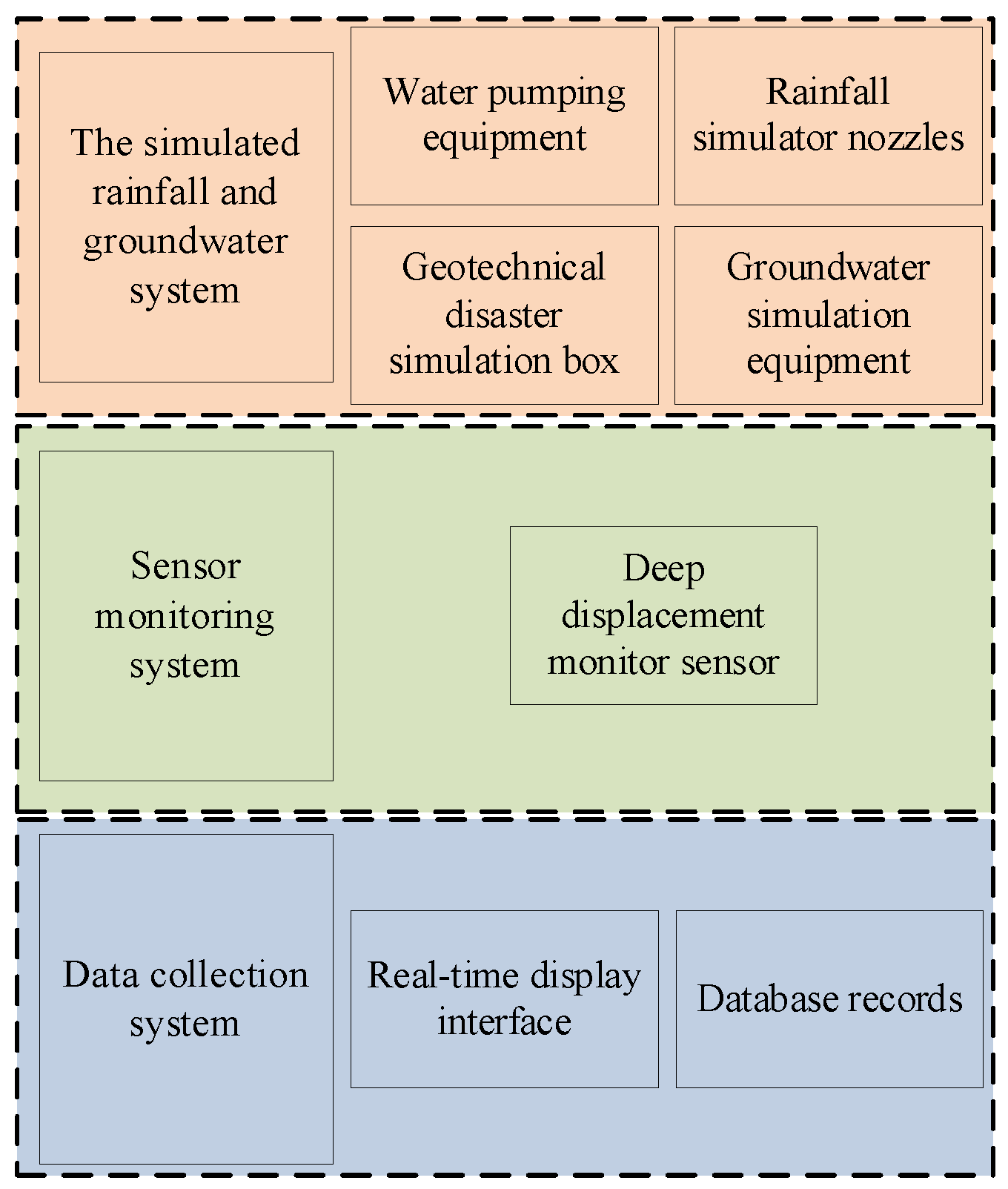
2.1. Experiment Platform
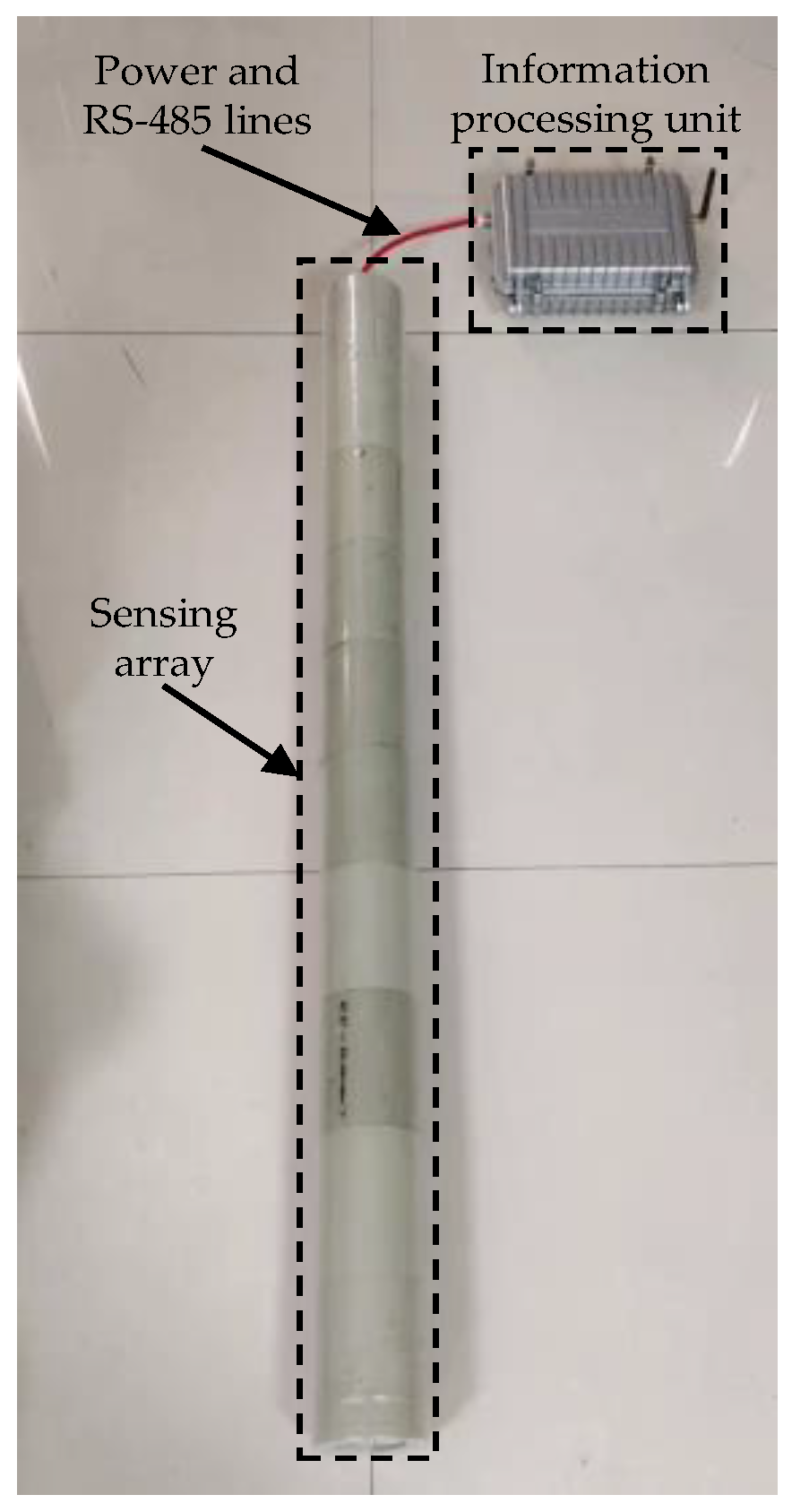
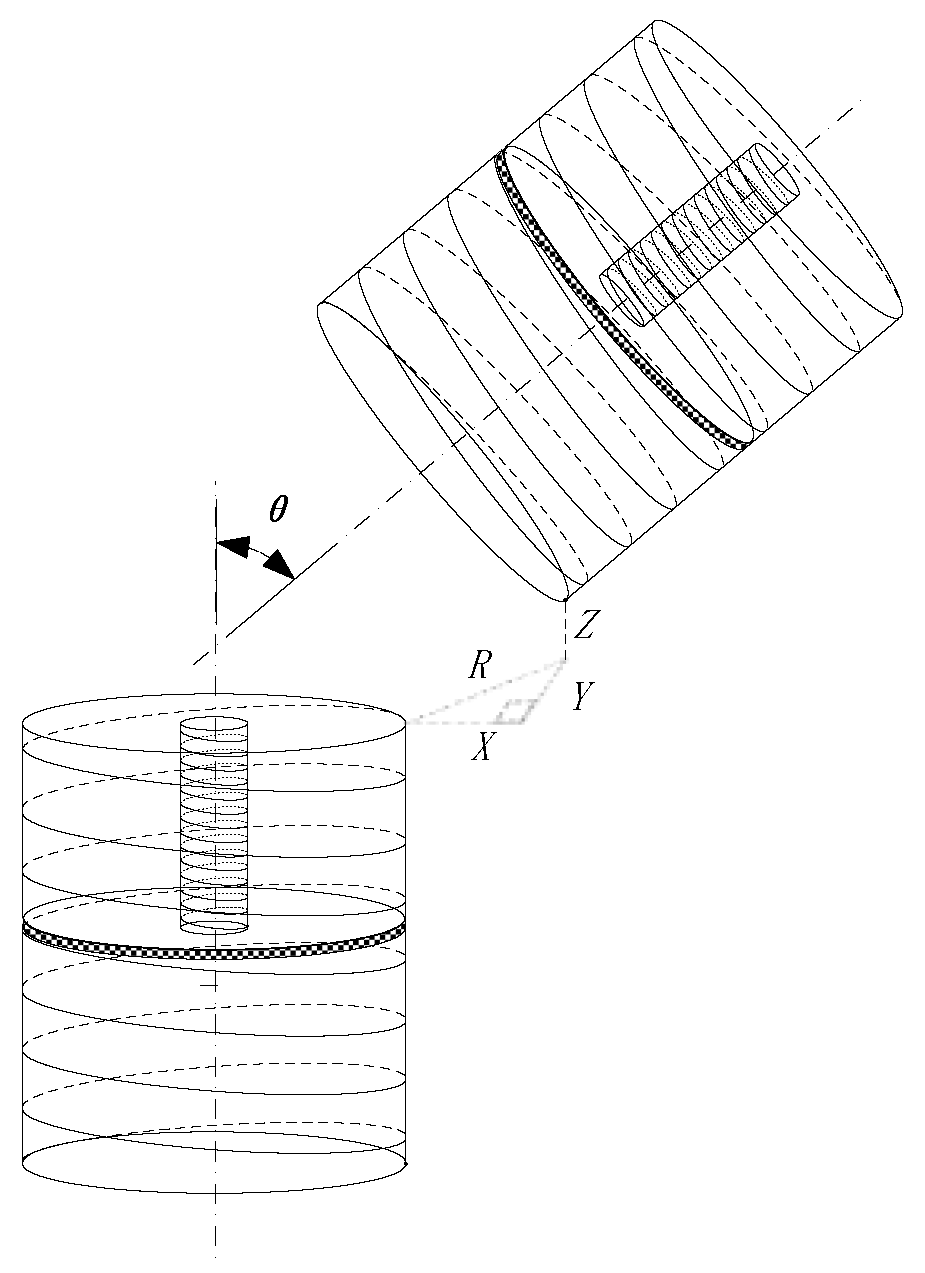
2.2. Introduction to the Principle of Deep Displacement Monitor Sensor
3. Methodology
3.1. Prediction Model
3.2. Landslide Risk Evaluation
4. Application Examples
4.1. Performance of Model Parameters
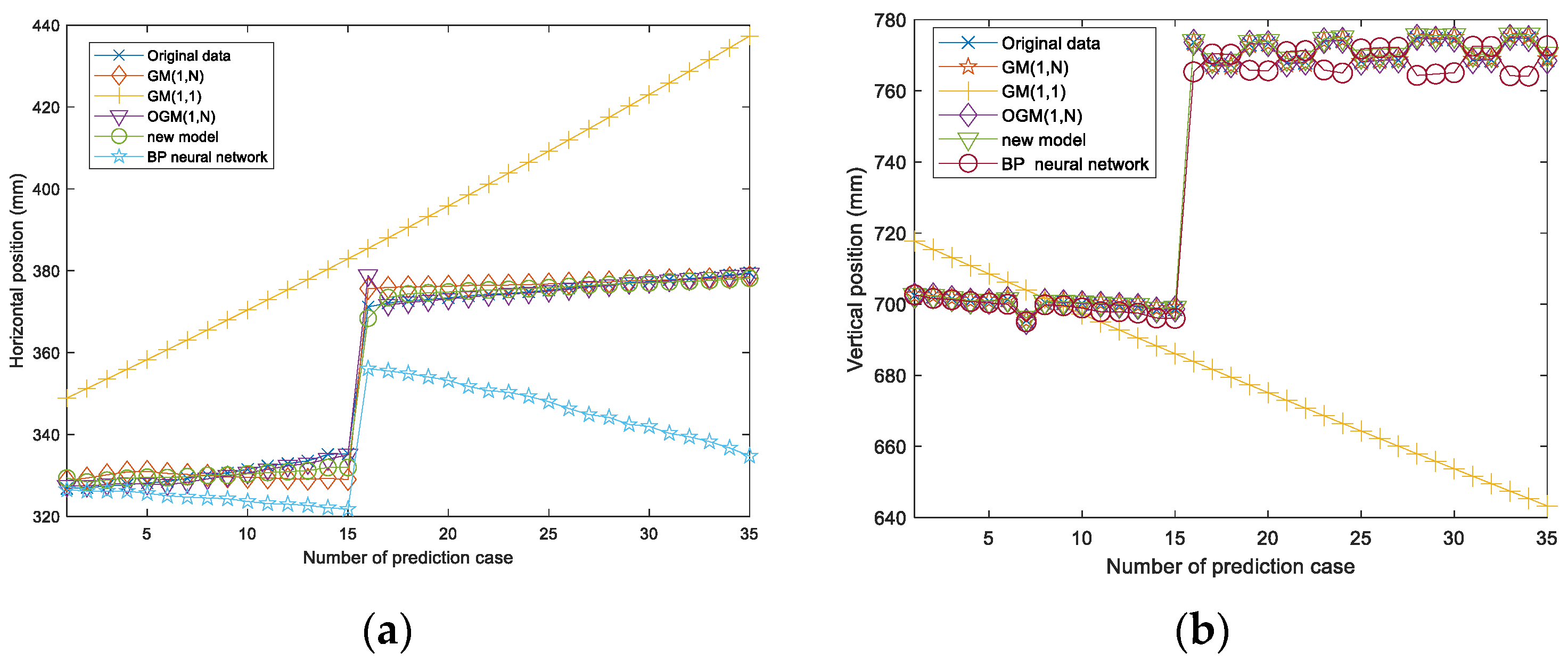
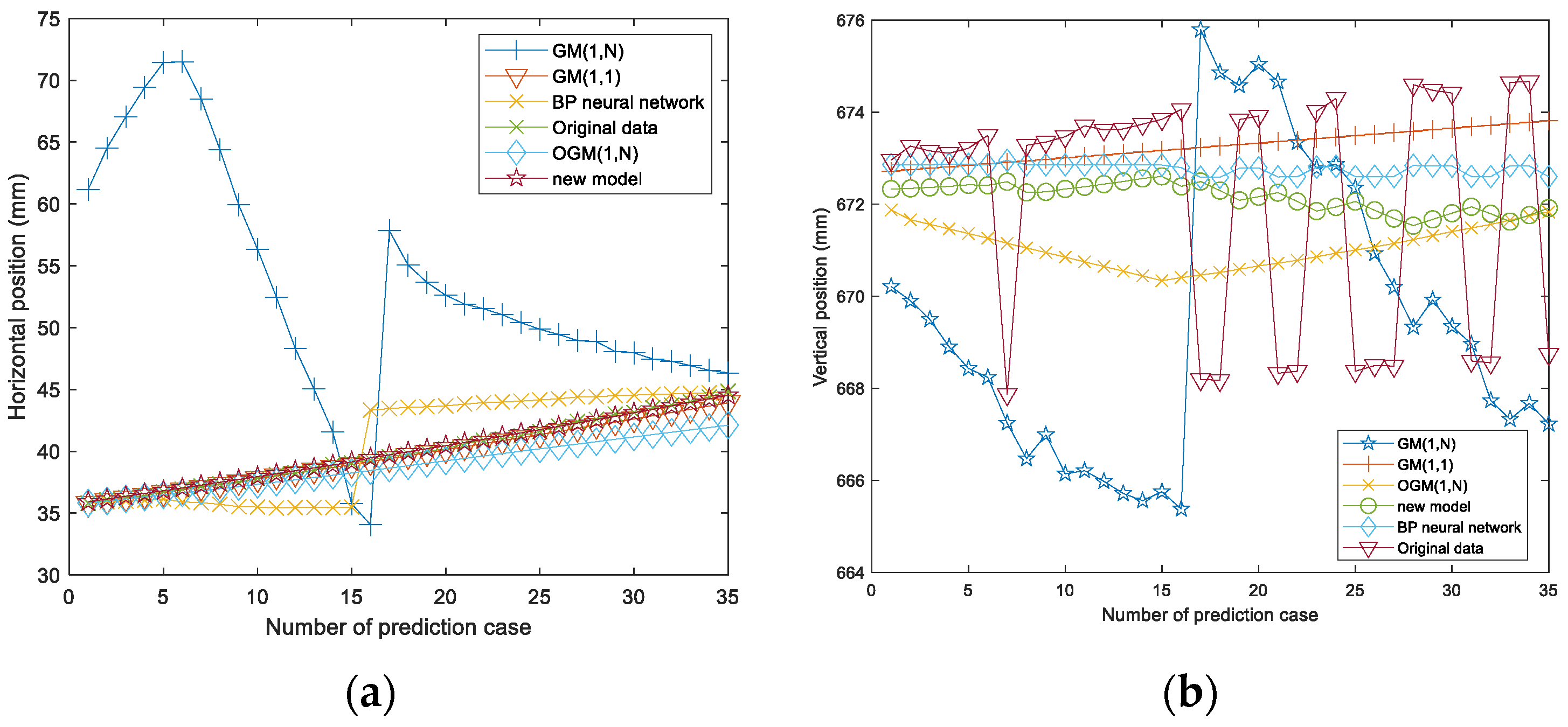
4.2. Landslide Prediction Performance
5. Conclusions
- (1)
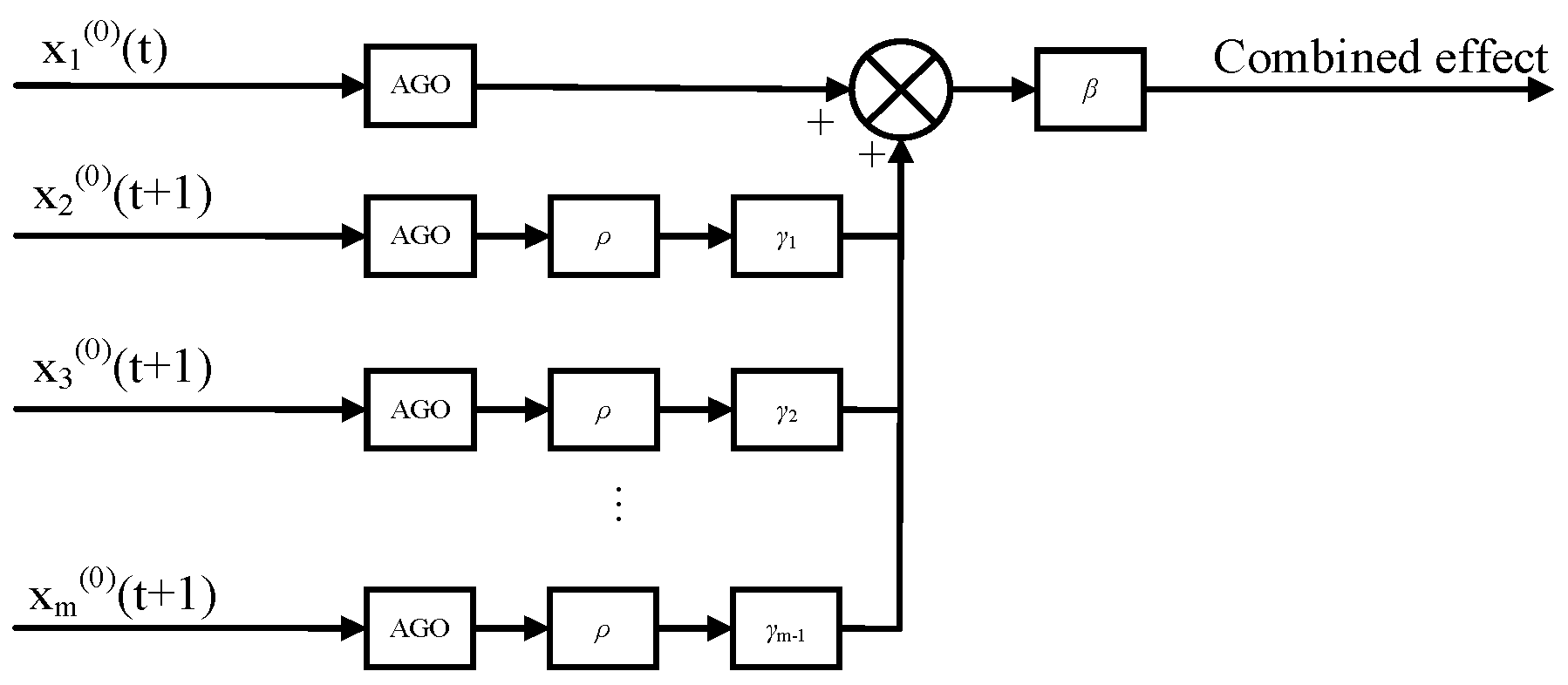
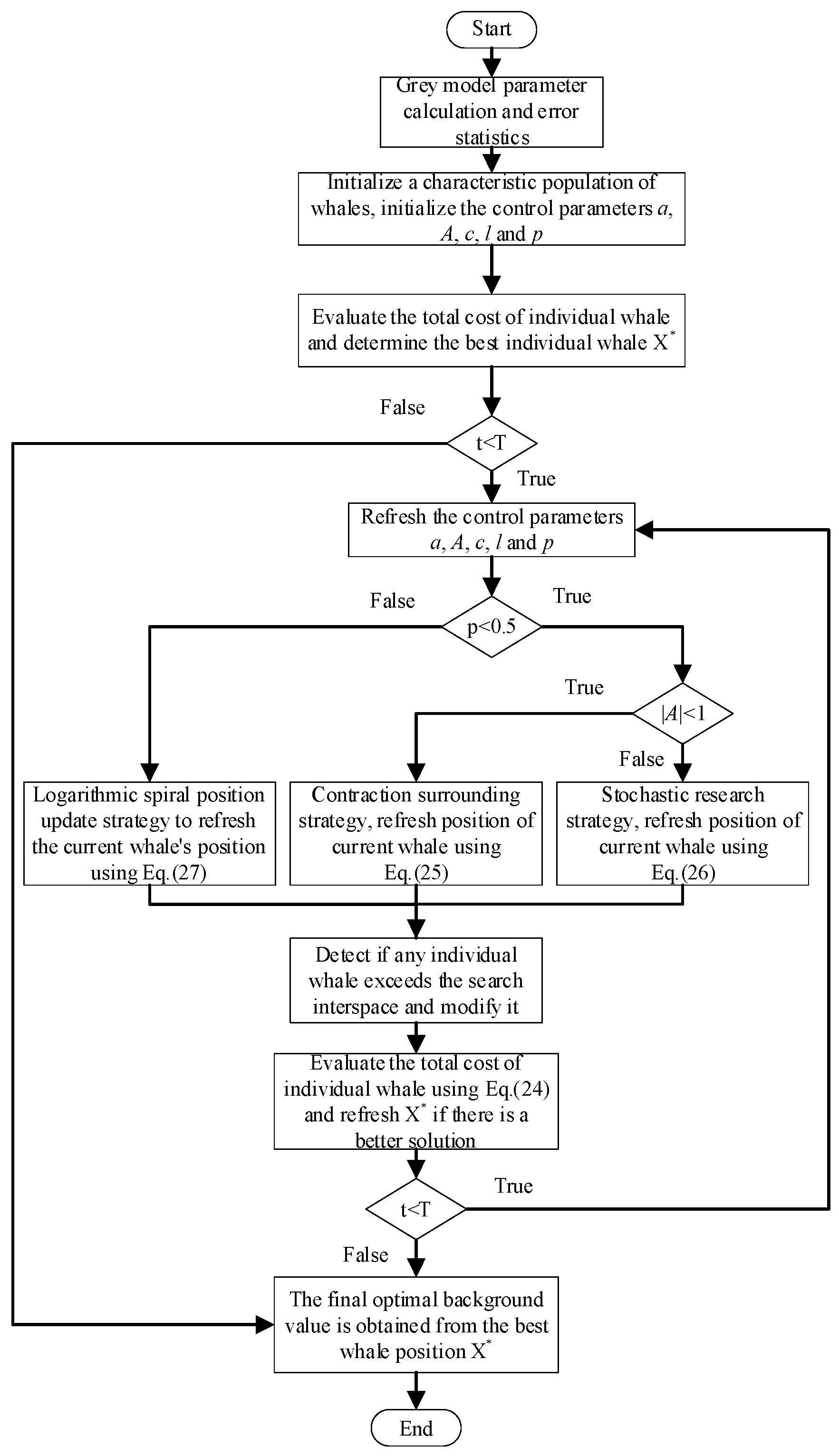
- The evolution of deep displacement is characterized by stochasticity, nonlinearity, complexity, and uncertainty. In order to better predict the deep displacement propagation, it is necessary to fully consider the correlation between multiple sensing units of deep displacement. In this paper, based on grey system theory, a prediction method with feedback influence is proposed and the WOA is used to determine the unknown background value parameters in it.
- (2)
- By using three sensors’ data to show that the new grey prediction model has a smaller mean absolute percentage error, which is better than several comparative models. The input parameters in this process are the historical displacement-related parameters of the sensors above the slip band and the output is a prediction of the future displacement.
- (3)
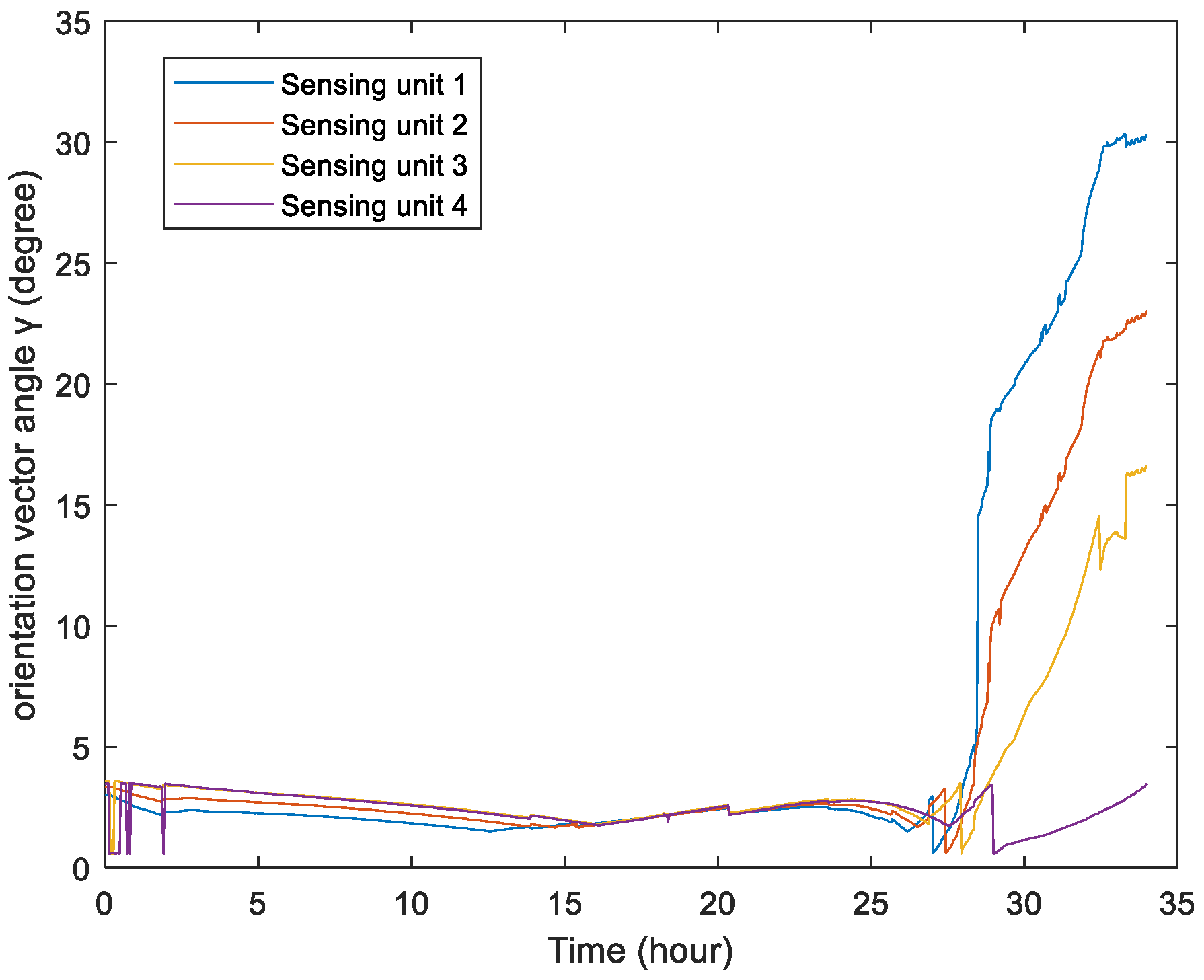
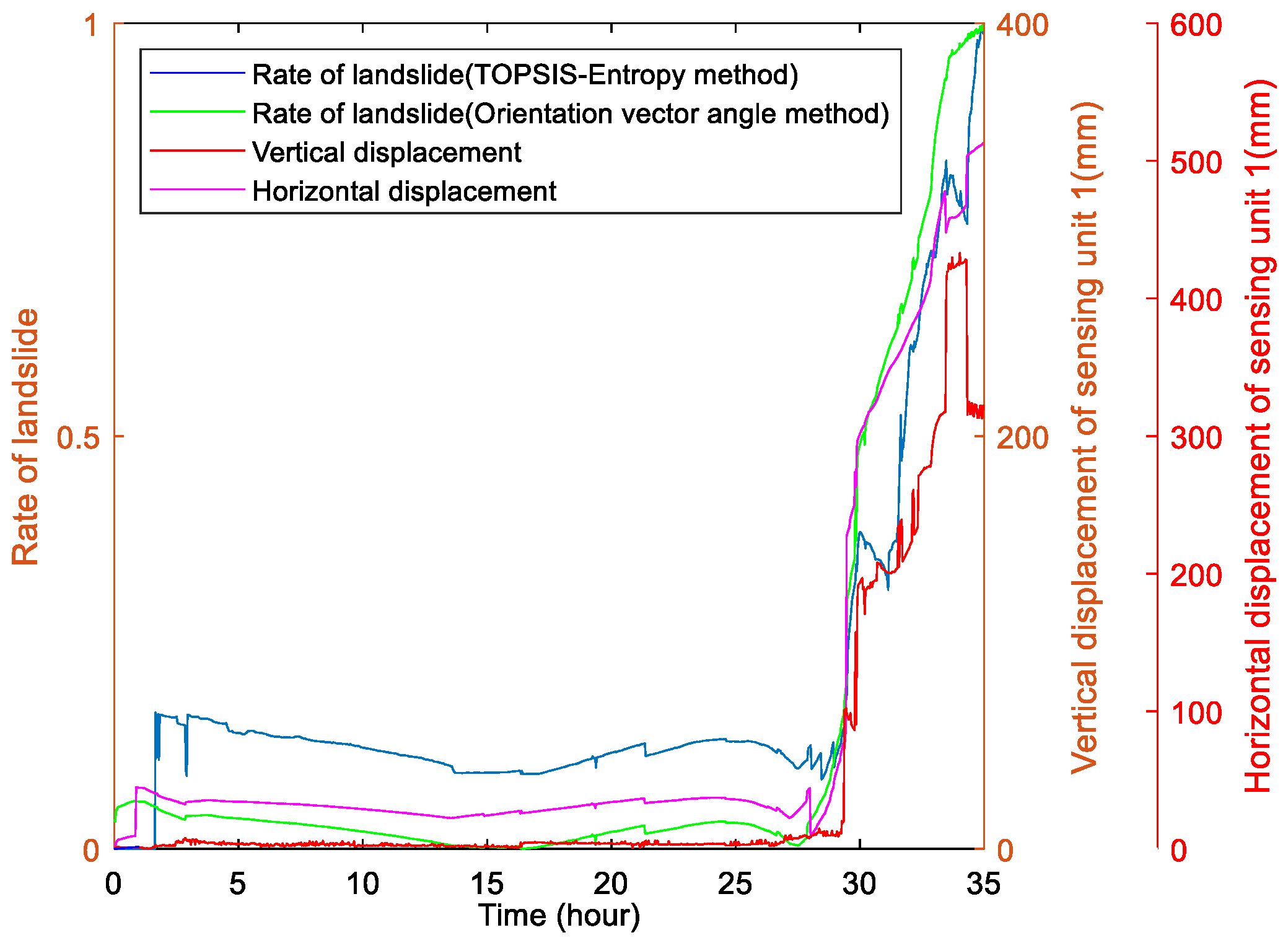
- A new method for calculating landslide warning factors based on a deep displacement monitor sensor is proposed, which avoids the situation that it is difficult to have a unified standard due to complex environmental factors. Compared with the existing methods of evaluating landslide risk based on multi-parameter data, the orientation vector angle method can avoid the problem that landslide hazard factors are easily affected by data fluctuations. Therefore, it may be an effective method for general landslide displacement prediction.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Froude, M.J.; Petley, D.N. Global fatal landslide occurrence from 2004 to 2016. Nat. Hazards Earth Syst. Sci. 2018, 18, 2161–2181. [Google Scholar] [CrossRef] [Green Version]
- Yan, T.; Shen, S.L.; Zhou, A.N.; Chen, J. A Brief Report of Pingdi Landslide (23 July 2019) in Guizhou Province, China. Geosciences 2019, 9, 368. [Google Scholar] [CrossRef] [Green Version]
- Achu, A.L.; Joseph, S.; Aju, C.D.; Mathai, J. Preliminary analysis of a catastrophic landslide event on 6 August 2020 at Pettimudi, Kerala State, India. Landslides 2021, 18, 1459–1463. [Google Scholar] [CrossRef]
- Ma, J.; Liu, X.; Niu, X.; Wang, Y.; Wen, T.; Zhang, J.; Zou, Z. Forecasting of Landslide Displacement Using a Probability-Scheme Combination Ensemble Prediction Technique. Int. J. Environ. Res. Public Health 2020, 17, 4788. [Google Scholar] [CrossRef]
- He, C.; Hua, T.; Xiurun, G.; Yajun, L. Research on early warning of creep landslide by early-warning indictors based on deep displacements. Chin. J. Rock Mech. Eng. 2019, 38, 3015–3024. [Google Scholar] [CrossRef]
- Zhu, X.; Xu, Q.; Zhou, J.; Deng, M. Remote Landslide Observation System with Differential GPS. Procedia Earth Planet. Sci. 2012, 5, 70–75. [Google Scholar] [CrossRef] [Green Version]
- Benoit, L.; Briole, P.; Martin, O.; Thom, C.; Ulrich, P. Monitoring landslide displacements with the Geocube wireless network of low-cost GPS. Eng. Geol. 2015, 195, 111–121. [Google Scholar] [CrossRef]
- Li, Y.; Zuo, X.; Xiong, P.; You, H.; Zhang, H.; Yang, F.; Zhao, Y.; Yang, Y.; Liu, Y. Deformation monitoring and analysis of Kunyang phosphate mine fusion with InSAR and GPS measurements. Adv. Space Res. 2022, 69, 2637–2658. [Google Scholar] [CrossRef]
- Bányai, L.; Mentes, G.; Újvári, G.; Kovács, M.; Czap, Z.; Gribovszki, K.; Papp, G. Recurrent landsliding of a high bank at Dunaszekcső, Hungary: Geodetic deformation monitoring and finite element modeling. Geomorphology 2014, 210, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Rodgers, M.; Deng, F.; Dixon, T.H.; Glennie, C.L.; James, M.R.; Malservisi, R.; Van Alphen, R.; Xie, S. 2.03-Geodetic Applications to Geomorphology. In Treatise on Geomorphology, 2nd ed.; Shroder, J.F., Ed.; Academic Press: Oxford, UK, 2022; pp. 34–55. [Google Scholar] [CrossRef]
- Gomberg, J.; Schulz, W.; Bodin, P.; Kean, J. Seismic and geodetic signatures of fault slip at the Slumgullion Landslide Natural Laboratory. J. Geophys. Res. 2011, 116. [Google Scholar] [CrossRef]
- Marek, L.; Miřijovský, J.; Tuček, P. Monitoring of the Shallow Landslide Using UAV Photogrammetry and Geodetic Measurements; Springer: Cham, Switzerland, 2015. [Google Scholar]
- Shimizu, Y.; Yamakoshi, T.; Osanai, N.; Fukushima, A.; Mio, A. Study on detection of landslide areas by differential interferometric synthetic aperture radar. J. Jpn. Landslide Soc. 2010, 42, 312–317. [Google Scholar] [CrossRef] [Green Version]
- Song, C.; Yu, C.; Li, Z.; Pazzi, V.; Utili, S. Landslide geometry and activity in Villa de la Independencia (Bolivia) revealed by InSAR and seismic noise measurements. Landslides 2021, 18, 2721–2737. [Google Scholar] [CrossRef]
- Zhu, Y.; Qiu, H.; Yang, D.; Liu, Z.; Sun, H. Pre- and post-failure spatiotemporal evolution of loess landslides: A case study of the Jiangou landslide in Ledu, China. Landslides 2021, 18, 3475–3484. [Google Scholar] [CrossRef]
- Li, Z.; Cao, Y.; Wei, J.; Duan, M.; Wu, L.; Hou, J.; Zhu, J. Time-series InSAR ground deformation monitoring: Atmospheric delay modeling and estimating. Earth-Sci. Rev. 2019, 192, 258–284. [Google Scholar] [CrossRef]
- Dai, K.R.; Liu, G.X.; Li, Z.H.; Ma, D.Y.; Wang, X.W.; Zhang, B.; Tang, J.; Li, G.Y. Monitoring Highway Stability in Permafrost Regions with X-band Temporary Scatterers Stacking InSAR. Sensors 2018, 18, 1876. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Huang, J.; Jiang, S.-H.; Huang, F.; Chang, Z. A web-based GPS system for displacement monitoring and failure mechanism analysis of reservoir landslide. Sci. Rep. 2017, 7, 17171. [Google Scholar] [CrossRef] [Green Version]
- Peng, J.C.; Wang, S.L.; Zhang, Y.X.; Yue, T.; Song, Y. Application of borehole inclinometer in landslide deformation monitoring. J. Xi’an Univ. Sci. Technol. 2014, 34, 440–444. [Google Scholar]
- Kaya, A.; Mdll, Ü.M. Slope stability evaluation and monitoring of a landslide: A case study from NE Turkey. J. Mt. Sci. 2020, 17, 2624–2635. [Google Scholar] [CrossRef]
- Ccc, A.; Cpl, B.; Yin, J.; Wcl, B.; Csy, B. Improved technical guide from physical model tests for TDR landslide monitoring. Eng. Geol. 2022, 296, 106417. [Google Scholar]
- Ho, S.C.; Chen, I.H.; Lin, Y.S.; Chen, J.Y.; Su, M.B. Slope deformation monitoring in the Jiufenershan landslide using time domain reflectometry technology. Landslides 2019, 16, 1141–1151. [Google Scholar] [CrossRef]
- Lin, Y.S.; Chen, I.H.; Ho, S.C.; Chen, J.Y.; Su, M.B. Applying time domain reflectometry to quantification of slope deformation by shear failure in a landslide. Environ. Earth Sci. 2019, 78, 1–11. [Google Scholar] [CrossRef]
- Zhang, L.; Shi, B.; Zhang, D.; Sun, Y.; Inyang, H.I. Kinematics, triggers and mechanism of Majiagou landslide based on FBG real-time monitoring. Environ. Earth Sci. 2020, 79, 1–17. [Google Scholar] [CrossRef]
- Pei, H.; Peng, C.; Yin, J.; Zhu, H.; Chen, X.; Pei, L.; Xu, D. Monitoring and warning of landslides and debris flows using an optical fiber sensor technology. J. Mt. Sci. 2011, 8, 11. [Google Scholar] [CrossRef]
- Wu, Z.S.; Xu, B.; Takahashi, T.; Harada, T. Performance of a BOTDR optical fibre sensing technique for crack detection in concrete structures. Struct. Infrastruct. Eng. 2008, 4, 311–323. [Google Scholar] [CrossRef]
- Ran, Q.H.; Su, D.Y.; Qian, Q.; Fu, X.D.; Wang, G.Q.; He, Z.G. Physically-based approach to analyze rainfall-triggered landslide using hydraulic gradient as slide direction. J. Zhejiang Univ. A 2012, 13, 943–957. [Google Scholar] [CrossRef]
- Yavari-Ramshe, S.; Ataie-Ashtiani, B. A rigorous finite volume model to simulate subaerial and submarine landslide-generated waves. Landslides 2015, 14, 1–19. [Google Scholar] [CrossRef]
- Chen, G.; Meng, X.M.; Guo, P.; Ya-Jun, L.I.; Zeng, R.Q. Landslide susceptibility mapping based on GIS and information value model in Bailong river basin. J. Lanzhou Univ. (Nat. Sci.) 2011, 47, 1–6. [Google Scholar]
- Chen, W.; Li, W.; Hou, E.; Zhao, Z.; Deng, N.; Bai, H.; Wang, D. Landslide susceptibility mapping based on GIS and information value model for the Chencang District of Baoji, China. Arab. J. Geosci. 2014, 7, 4499–4511. [Google Scholar] [CrossRef]
- Sharma, L.P.; Patel, N.; Ghose, M.K.; Debnath, P. Development and application of Shannon’s entropy integrated information value model for landslide susceptibility assessment and zonation in Sikkim Himalayas in India. Nat. Hazards 2015, 75, 1555–1576. [Google Scholar] [CrossRef]
- Singh, P.; Sharma, A.; Sur, U.; Rai, P.K. Comparative landslide susceptibility assessment using statistical information value and index of entropy model in Bhanupali-Beri region, Himachal Pradesh, India. Environ. Dev. Sustain. A Multidiscip. Approach Theory Pract. Sustain. Dev. 2021, 23, 5233–5250. [Google Scholar] [CrossRef]
- Li, X.; Tang, H.; Chen, S. Application of GIS-Based Logistic Regression Model and Cluster Method to Regional Landslide Risk Zoning. In Geological Engineering: Proceedings of the 1st International Conference (ICGE 2007); ASME Press: New York, NY, USA, 2009. [Google Scholar]
- Sun, D.; Wen, H.; Zhang, Y.; Xue, M.; Glade, T.; Murty, T.S. An optimal sample selection-based logistic regression model of slope physical resistance against rainfall-induced landslide. Nat. Hazards 2021, 105, 1255–1279. [Google Scholar] [CrossRef]
- Xiao, Y.; Xian-Fu, L.I. Forecast for landslide based on Optimum Grey model. J. Wuhan Inst. Technol. 2012, 34, 31–35. [Google Scholar]
- Miao, S.; Hao, X.; Guo, X.; Wang, Z.; Liang, M. Displacement and landslide forecast based on an improved version of Saito’s method together with the Verhulst-Grey model. Arab. J. Geosci. 2017, 10, 53. [Google Scholar] [CrossRef]
- Mowen, X. Prediction of Landslide Deformation dy Dynamic Unequal Interval Grey Model. Met. Mine 2013, 42, 20. [Google Scholar]
- Li, S.H.; Zhu, L.; Wu, Y.; Lei, X.Q. A novel grey multivariate model for forecasting landslide displacement. Eng. Appl. Artif. Intell. 2021, 103, 104297. [Google Scholar] [CrossRef]
- Youssef, A.M.; Pourghasemi, H.R.; Pourtaghi, Z.S.; Al-Katheeri, M.M. Landslide susceptibility mapping using random forest, boosted regression tree, classification and regression tree, and general linear models and comparison of their performance at Wadi Tayyah Basin, Asir Region, Saudi Arabia. Landslides 2016, 13, 839–856. [Google Scholar] [CrossRef]
- Chen, W.; Li, X.; Wang, Y.; Chen, G.; Liu, S. Forested landslide detection using LiDAR data and the random forest algorithm: A case study of the Three Gorges, China. Remote Sens. Environ. 2014, 152, 291–301. [Google Scholar] [CrossRef]
- Zhou, X.; Wen, H.; Zhang, Y.; Xu, J.; Zhang, W. Landslide susceptibility mapping using hybrid random forest with GeoDetector and RFE for factor optimization. Geosci. Front. 2021, 12, 101211. [Google Scholar] [CrossRef]
- Xu, Z.W. GIS and ANN model for landslide susceptibility mapping. J. Geogr. Sci. 2001, 11, 374–381. [Google Scholar]
- Yilmaz, I. Landslide susceptibility mapping using frequency ratio, logistic regression, artificial neural networks and their comparison: A case study from Kat landslides (Tokat—Turkey). Comput. Geosci. 2009, 35, 1125–1138. [Google Scholar] [CrossRef]
- Mehrabi, M.; Moayedi, H. Landslide susceptibility mapping using artificial neural network tuned by metaheuristic algorithms. Environ. Earth Sci. 2021, 80, 1–20. [Google Scholar] [CrossRef]
- Shentu, N.; Wang, F.; Li, Q.; Qiu, G.; Tong, R.; An, S. Three-Dimensional Measuring Device and Method of Underground Displacement Based on Double Mutual Inductance Voltage Contour Method. Sensors 2022, 22, 1725. [Google Scholar] [CrossRef]
- Tien, T.L. A research on the grey prediction model GM(1,n). Appl. Math. Comput. 2012, 218, 4903–4916. [Google Scholar] [CrossRef]
- Zeng, B.; Luo, C.; Liu, S.; Bai, Y.; Li, C. Development of an optimization method for the GM(1,N) model. Eng. Appl. Artif. Intell. 2016, 55, 353–362. [Google Scholar] [CrossRef]
- Tan, G.J. The Structure Method and Application of Background Value in Grey System GM(1,1) Model (II). Syst. Eng. Theory Pract. 2000, 20, 98–103. [Google Scholar]
- Yang, Y.; Liu, S. Grey Systems: Theory and Application. Grey Syst. Theory Appl. 2011, 4883, 44–45. [Google Scholar]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Xu, Q.; Tang, M.; Xu, K.; Huang, X. Research on space-time evolution laws and early warning-prediction of landslides. Yanshilixue Yu Gongcheng Xuebao/Chin. J. Rock Mech. Eng. 2008, 27, 1104–1112. [Google Scholar]
- Shu, H.E.; Chen, F. Research of landslide stability assessment based on intuitionistic fuzzy sets TOPSIS multiple attribute decision making method. Chin. J. Geol. Hazard Control 2016, 27, 22–28. [Google Scholar]
- Seif, A.; Mofrad, M.R. Examining the potential landslide in Chaharmahal Va Bakhtiari province by applying multi criterion models of decision making. Trans. R. Soc. Edinb. Earth Sci. 2013, 26, 31–48. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ξ | FOBGM(1, 6) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| x1(0) | 12.297 | 10.911 | 5.391 | 2.324 | 3.619 | 14.838 | 14.757 | 40.369 | 526.060 | ||
| 0.1 | 12.297 | 12.248 | 8.014 | 1.367 | 0.151 | 15.435 | 17.529 | 42.799 | 553.553 | 25.772% | |
| ε(k) | 0.000 | 1.337 | 2.623 | 0.957 | 3.468 | 0.597 | 2.772 | 2.430 | 27.493 | ||
| Δ(k) | 0.000% | 12.255% | 48.643% | 41.174% | 95.828% | 4.020% | 18.785% | 6.020% | 5.226% | ||
| 0.2 | 12.297 | 12.221 | 8.214 | 1.707 | 0.344 | 15.659 | 18.149 | 44.577 | 571.029 | 25.432% | |
| ε(k) | 0.000 | 1.310 | 2.823 | 0.617 | 3.275 | 0.821 | 3.392 | 4.208 | 44.969 | ||
| Δ(k) | 0.000% | 12.007% | 52.352% | 26.543% | 90.495% | 5.530% | 22.986% | 10.425% | 8.548% | ||
| 0.3 | 12.297 | 12.187 | 8.458 | 2.145 | 0.652 | 16.096 | 19.199 | 47.456 | 599.211 | 25.366% | |
| ε(k) | 0.000 | 1.276 | 3.067 | 0.179 | 2.967 | 1.258 | 4.442 | 7.087 | 73.151 | ||
| Δ(k) | 0.000% | 11.696% | 56.878% | 7.694% | 81.984% | 8.475% | 30.101% | 17.557% | 13.905% | ||
| 0.4 | 12.297 | 12.145 | 8.759 | 2.728 | 1.152 | 16.922 | 21.062 | 52.422 | 647.347 | 29.891% | |
| ε(k) | 0.000 | 1.234 | 3.368 | 0.404 | 2.467 | 2.084 | 6.305 | 12.053 | 121.287 | ||
| Δ(k) | 0.000% | 11.311% | 62.461% | 17.394% | 68.168% | 14.041% | 42.726% | 29.858% | 23.056% | ||
| 0.5 | 12.297 | 12.089 | 9.142 | 3.533 | 1.999 | 18.510 | 24.575 | 61.708 | 735.987 | 40.134% | |
| ε(k) | 0.000 | 1.178 | 3.751 | 1.209 | 1.620 | 3.672 | 9.818 | 21.339 | 209.927 | ||
| Δ(k) | 0.000% | 10.797% | 69.565% | 52.035% | 44.764% | 24.743% | 66.532% | 52.861% | 39.906% | ||
| 0.6 | 12.297 | 12.015 | 9.644 | 4.703 | 3.514 | 21.707 | 31.794 | 81.031 | 916.690 | 59.000% | |
| ε(k) | 0.000 | 1.104 | 4.253 | 2.379 | 0.105 | 6.869 | 17.037 | 40.662 | 390.630 | ||
| Δ(k) | 0.000% | 10.119% | 78.876% | 102.384% | 2.902% | 46.288% | 115.451% | 100.727% | 74.256% | ||
| 0.7 | 12.297 | 11.908 | 10.328 | 6.525 | 6.450 | 28.716 | 48.562 | 127.647 | 1342.015 | 117.070% | |
| ε(k) | 0.000 | 0.997 | 4.937 | 4.201 | 2.831 | 13.878 | 33.805 | 87.278 | 815.955 | ||
| Δ(k) | 0.000% | 9.139% | 91.563% | 180.790% | 78.225% | 93.524% | 229.079% | 216.203% | 155.107% | ||
| 0.267 | 12.29738 | 12.199 | 8.372 | 1.989 | 0.535 | 15.921 | 18.79 | 46.346 | 588.366 | 25.332% | |
| ε(k) | 0.000 | 1.288 | 2.981 | −0.335 | −3.084 | 1.083 | 4.033 | 5.977 | 62.306 | ||
| Δ(k) | 0.000% | 11.806% | 55.283% | 14.407% | 85.217% | 7.295% | 27.330% | 14.807% | 11.844% | ||
| x1(0) | N = 3 | N = 6 | N = 9 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| ε(k) | Δ(k) | ε(k) | Δ(k) | ε(k) | Δ(k) | ||||
| 13.042 | 13.042 | 0.000 | 0.000% | 13.042 | 0.000 | 0.000% | 13.042 | 0.000 | 0.000% |
| 12.307 | 11.465 | −0.842 | 6.842% | 12.164 | −0.143 | 1.162% | 12.306 | 0.001 | 0.008% |
| 17.518 | 16.649 | −0.870 | 4.966% | 17.376 | −0.143 | 0.816% | 17.498 | −0.020 | 0.114% |
| 18.599 | 17.387 | −1.213 | 6.522% | 18.413 | −0.187 | 1.005% | 18.676 | 0.077 | 0.414% |
| 19.456 | 18.371 | −1.085 | 5.577% | 19.267 | −0.189 | 0.971% | 19.403 | −0.053 | 0.272% |
| 19.760 | 18.463 | −1.298 | 6.569% | 19.502 | −0.259 | 1.311% | 19.726 | −0.034 | 0.172% |
| 19.903 | 18.550 | −1.353 | 6.798% | 19.727 | −0.176 | 0.884% | 19.916 | 0.013 | 0.065% |
| 20.010 | 18.667 | −1.343 | 6.711% | 19.767 | −0.243 | 1.214% | 20.040 | 0.030 | 0.150% |
| 20.135 | 18.788 | −1.348 | 6.695% | 19.926 | −0.210 | 1.043% | 20.130 | 0.005 | 0.025% |
| 6.335% | 1.051% | 0.136% | |||||||
| Unit 1 | Unit 2 | Unit 3 | |||
|---|---|---|---|---|---|
| GM(1, 1) | Horizontal displacement prediction | |εmax| | 56.7208 mm | 63.1630 mm | 0.8081 mm |
| 7.01% | 10.72% | 0.55% | |||
| Vertical displacement prediction | |εmax| | 131.1281 mm | 131.3932 mm | 5.1944 mm | |
| 9.74% | 9.29% | 0.30% | |||
| GM(1, N) | Horizontal displacement prediction | |εmax| | 23.9556 mm | 6.2681 mm | 35.0282 mm |
| 1.59% | 0.59% | 30.66% | |||
| Vertical displacement prediction | |εmax| | 0.5571 mm | 0.5766 mm | 8.4680 mm | |
| 0.03% | 0.03% | 0.67% | |||
| OGM(1, N) | Horizontal displacement prediction | |εmax| | 9.7855 mm | 3.3216 mm | 2.9627 mm |
| 0.45% | 0.34% | 2.96% | |||
| Vertical displacement prediction | |εmax| | 1.6290 mm | 1.6596 mm | 3.6594 mm | |
| 0.11% | 0.11% | 0.41% | |||
| BP neural network | Horizontal displacement prediction | |εmax| | 26.2313 mm | 46.8203 mm | 3.9909 mm |
| 2.55% | 5.77% | 4.88% | |||
| Vertical displacement prediction | |εmax| | 22.2676 mm | 5.9030 mm | 4.2476 mm | |
| 0.94% | 0.30% | 0.34% | |||
| FOBGM(1, N) | Horizontal displacement prediction | |εmax| | 22.8125 mm | 7.6742 mm | 0.4377 mm |
| 0.33% | 0.18% | 0.36% | |||
| Vertical displacement prediction | |εmax| | 0.3073 mm | 0.3110 mm | 4.7260 mm | |
| 0.01% | 0.01% | 0.35% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shentu, N.; Yang, J.; Li, Q.; Qiu, G.; Wang, F. Research on the Landslide Prediction Based on the Dual Mutual-Inductance Deep Displacement 3D Measuring Sensor. Appl. Sci. 2023, 13, 213. https://doi.org/10.3390/app13010213
Shentu N, Yang J, Li Q, Qiu G, Wang F. Research on the Landslide Prediction Based on the Dual Mutual-Inductance Deep Displacement 3D Measuring Sensor. Applied Sciences. 2023; 13(1):213. https://doi.org/10.3390/app13010213
Chicago/Turabian StyleShentu, Nanying, Jiacheng Yang, Qing Li, Guohua Qiu, and Feng Wang. 2023. "Research on the Landslide Prediction Based on the Dual Mutual-Inductance Deep Displacement 3D Measuring Sensor" Applied Sciences 13, no. 1: 213. https://doi.org/10.3390/app13010213