
An Explicit Finite Element Method for Saturated Soil Dynamic Problems and Its Application to Seismic Liquefaction Analysis


Abstract
:1. Introduction
2. Wave Equations of Saturated Porous Media in u-p Form
3. Explicit Finite Element Method for the u-p Formulation
3.1. Spatial Discretization
3.2. Explicit Integration Method in Time Domain
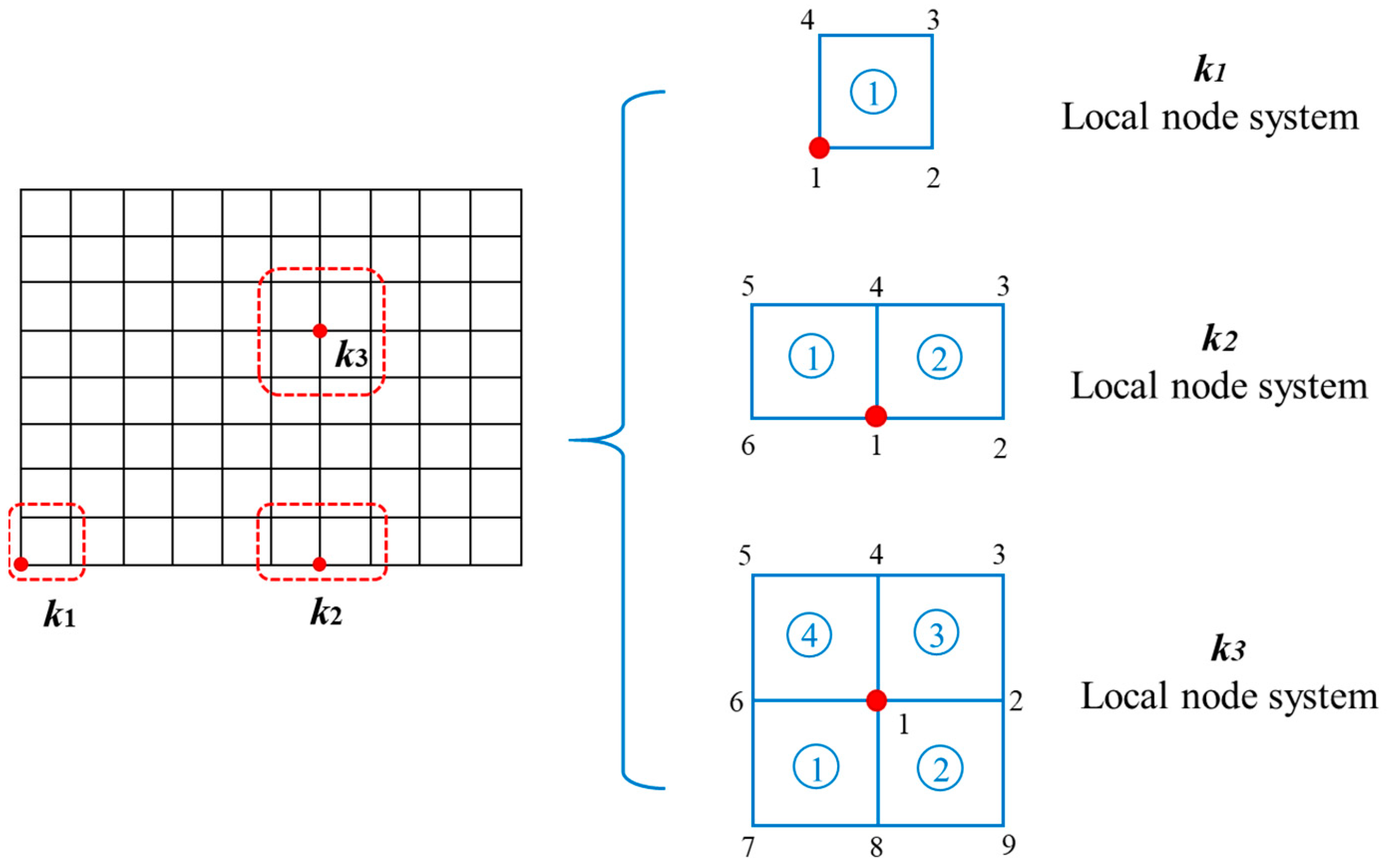
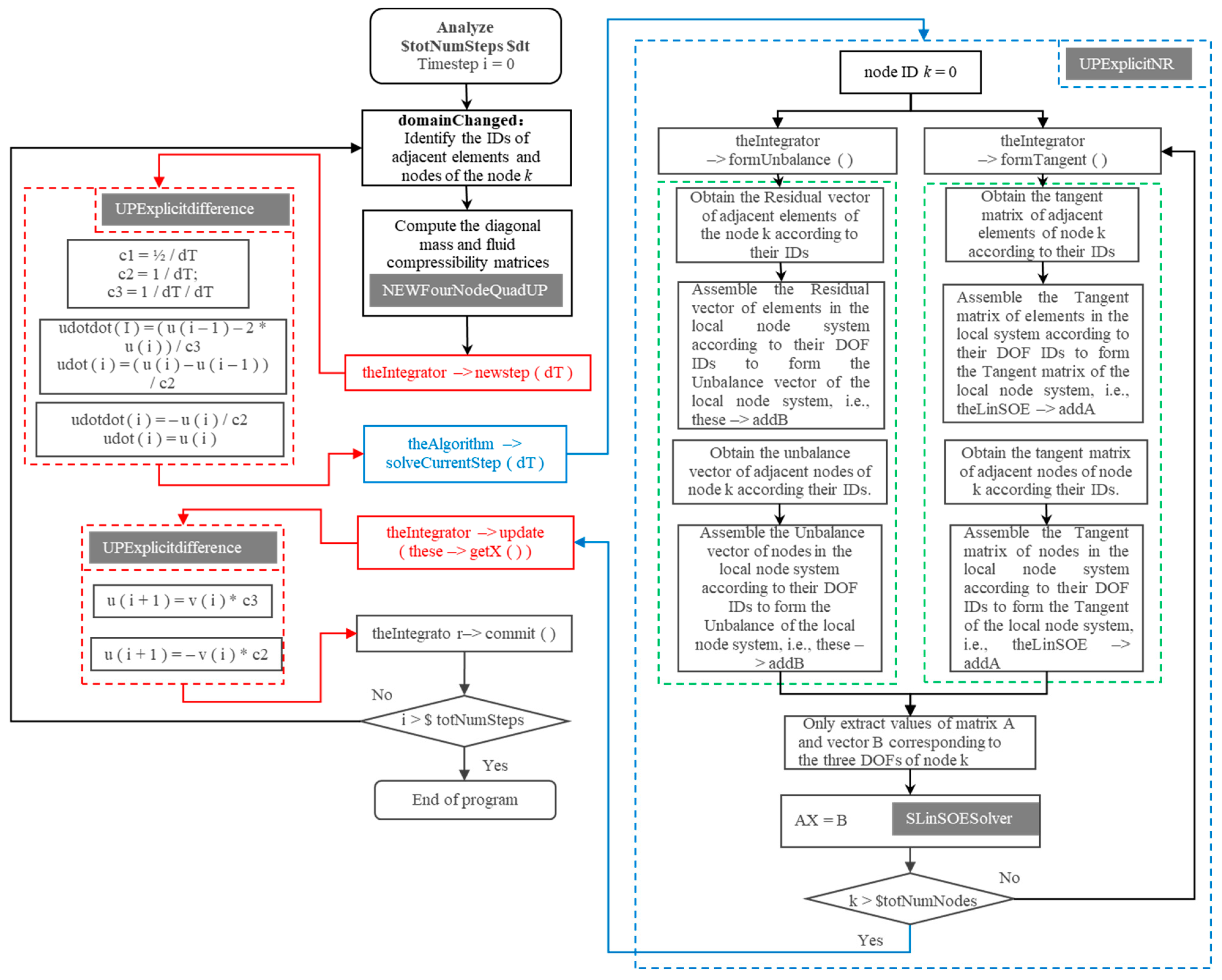
4. Implementation of the Explicit Finite Element Method in OpenSees
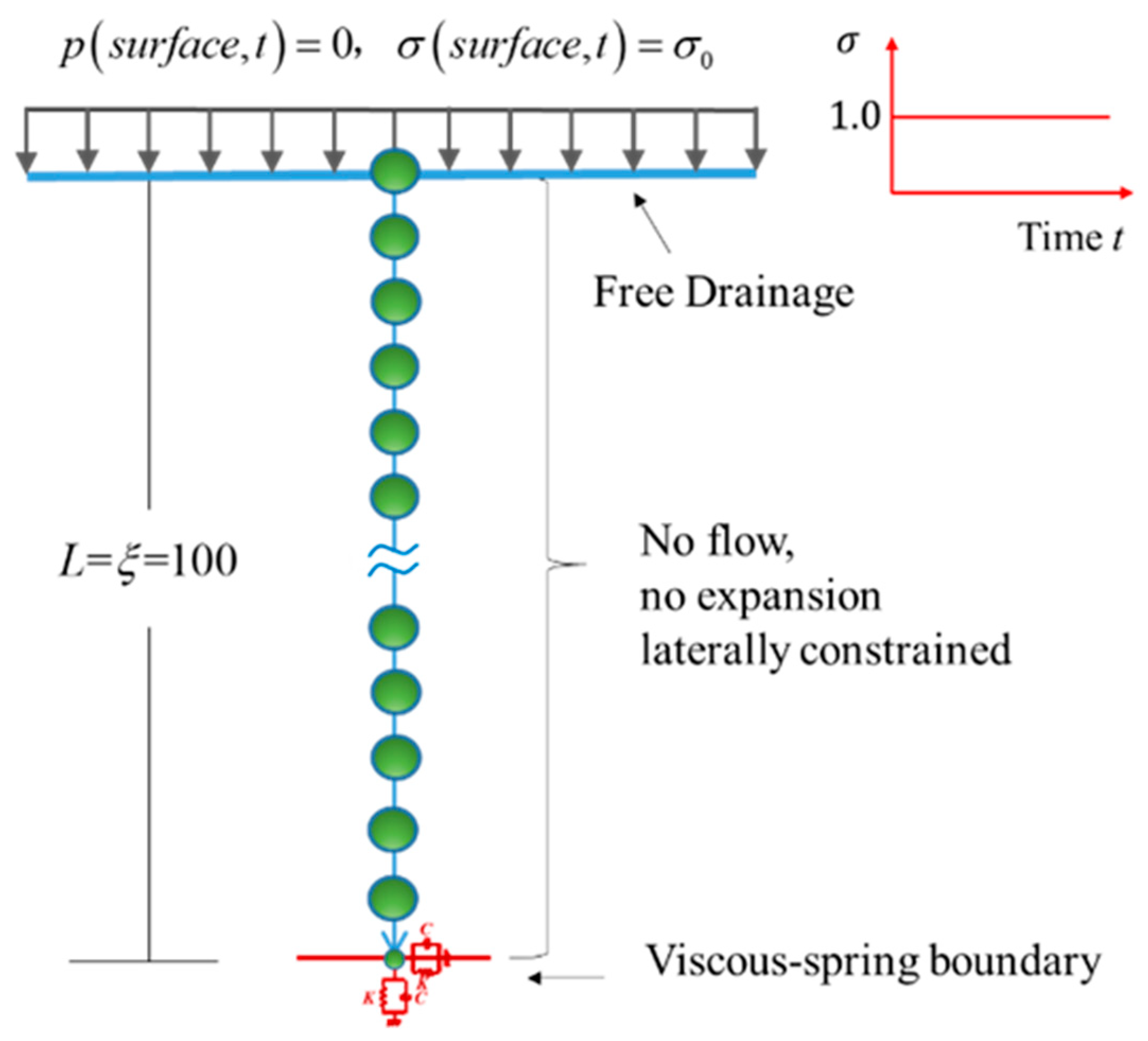
5. Viscoelastic Artificial Boundary
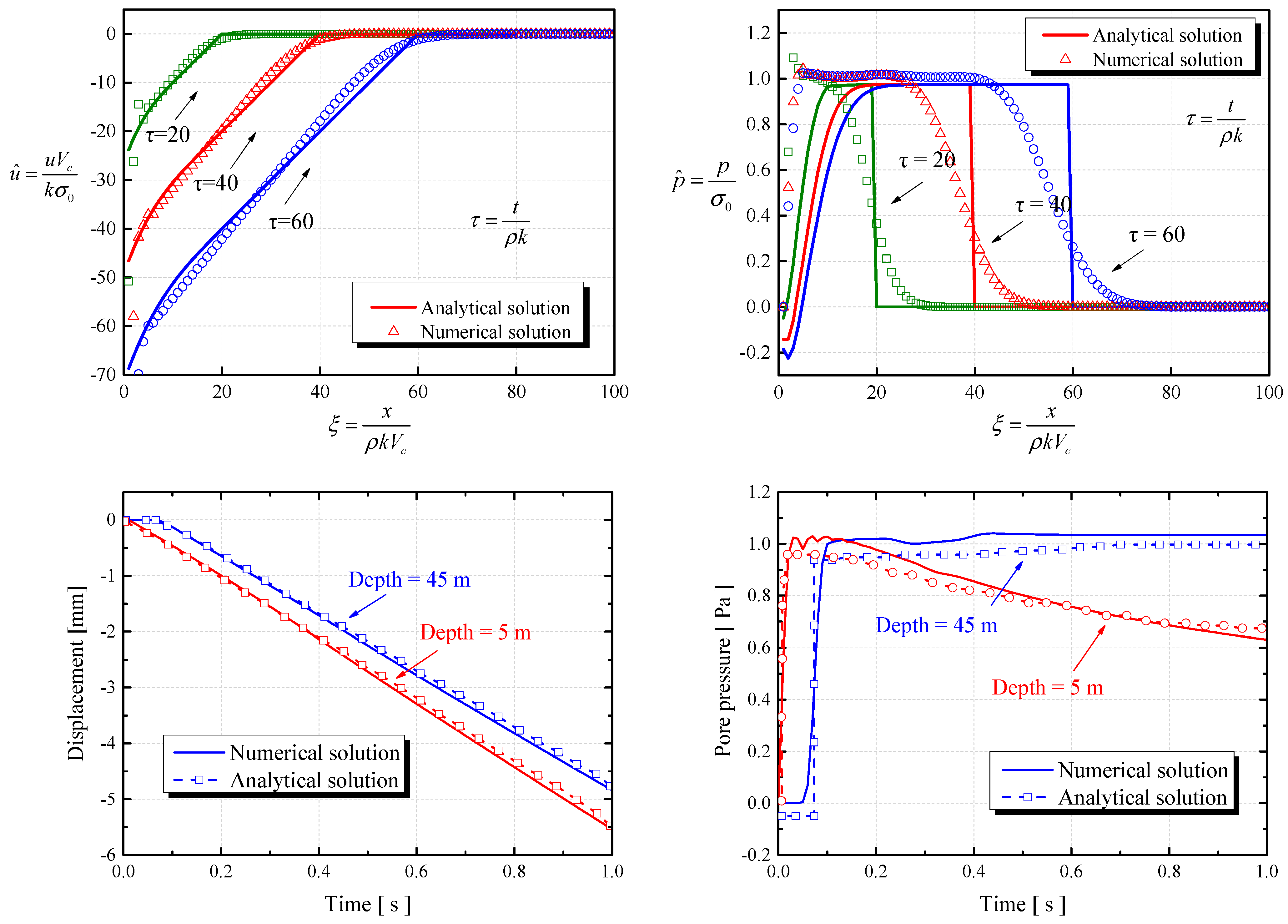
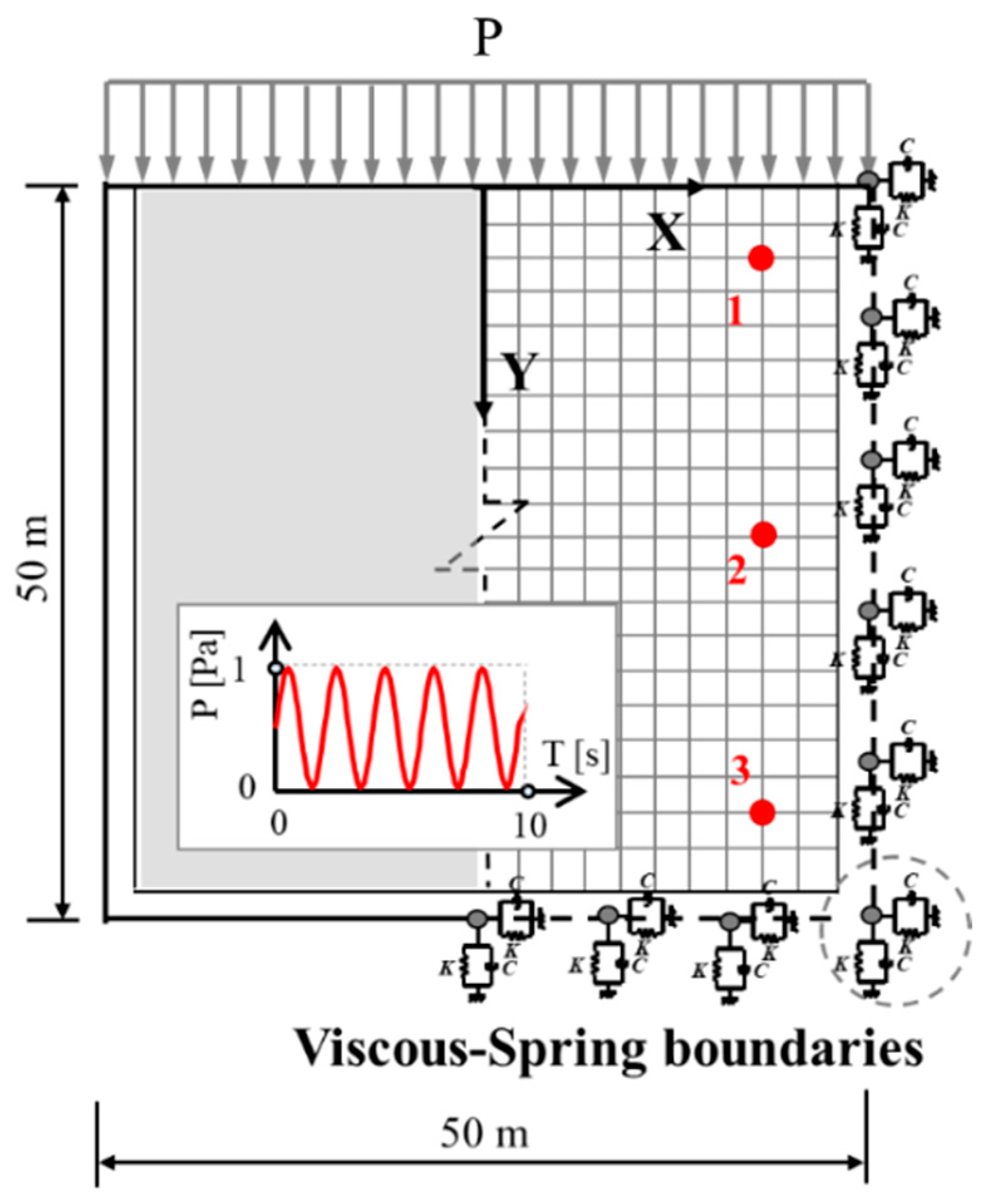
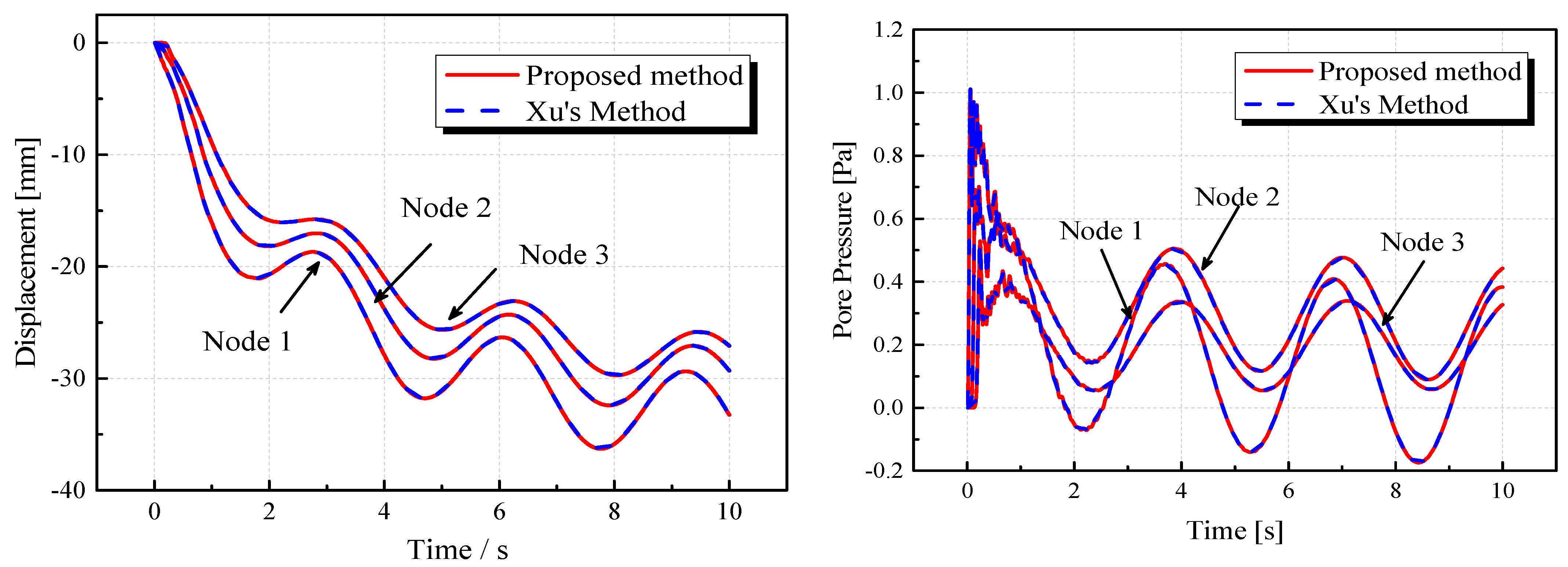
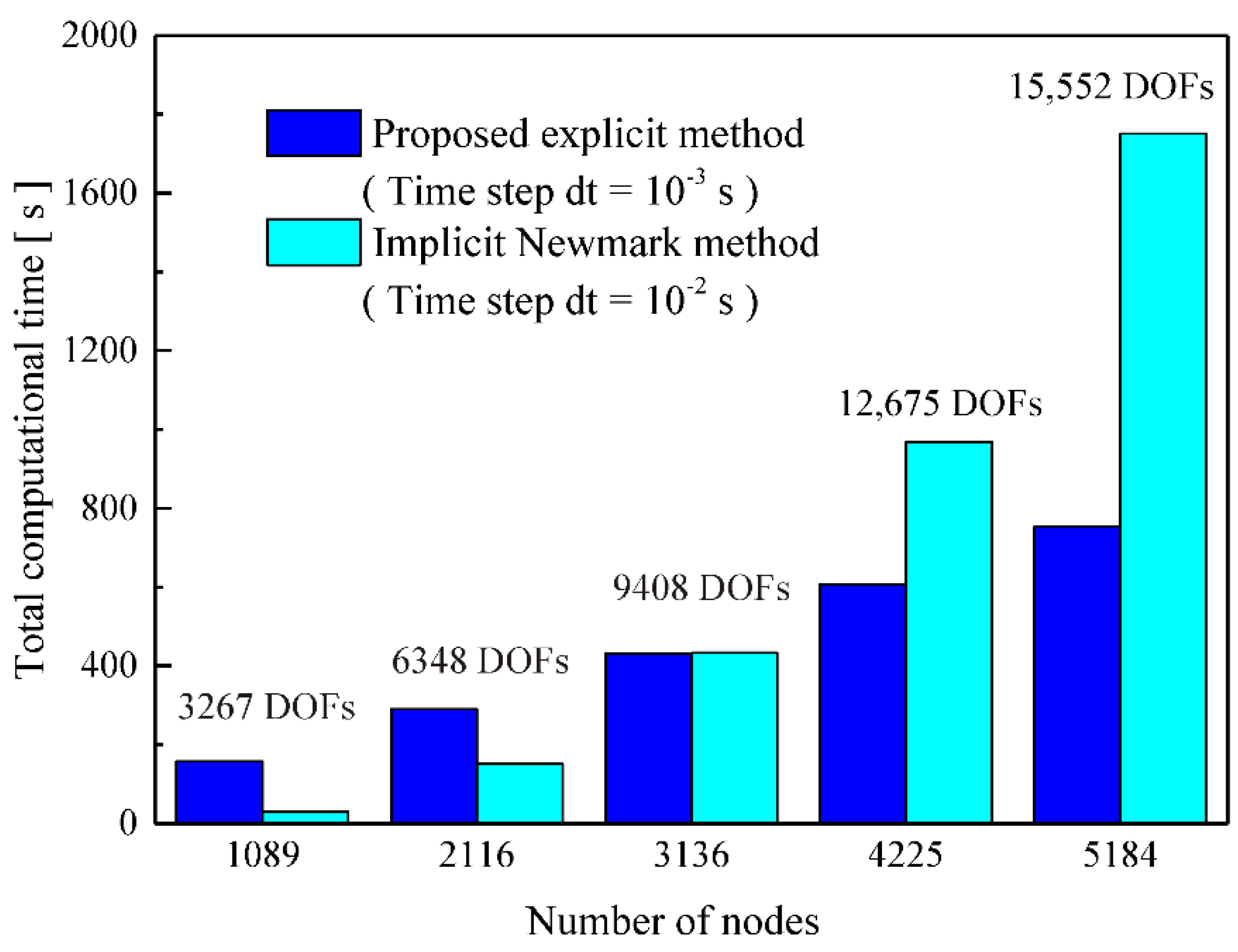
6. Validation of Method and Comparison of Computational Efficiency
7. Analysis of Nonlinear Problems
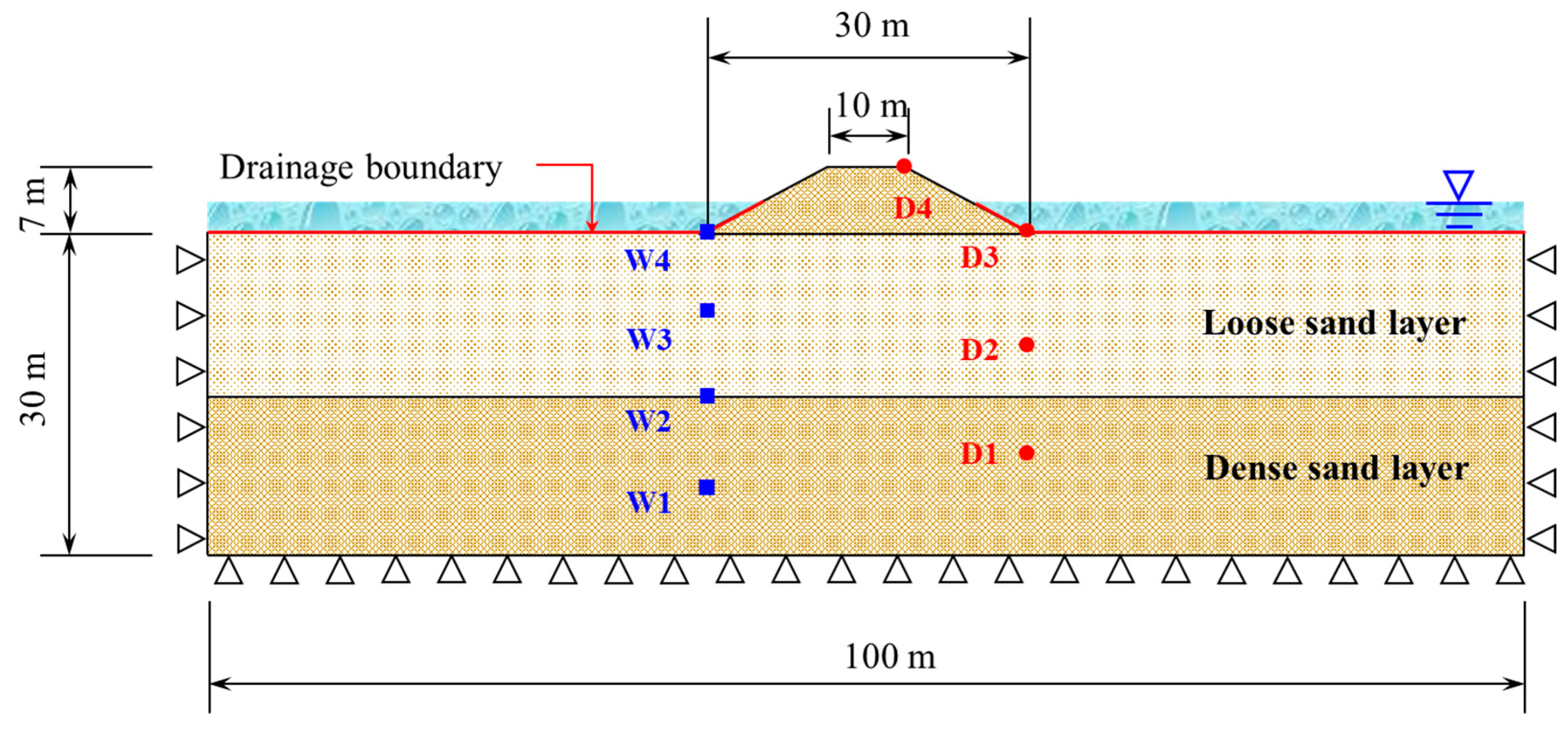
7.1. Finite Element Model
7.2. Numerical Results and Analysis
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Houmadi, Y.; Benmoussa, M.Y.C.; Cherifi, W.N.E.H.; Rahal, D.D. Probabilistic analysis of consolidation problems using subset simulation. Comput. Geotech. 2020, 124, 103612. [Google Scholar] [CrossRef]
- Savvides, A.A.; Papadrakakis, M. A probabilistic assessment for porous consolidation of clays. SN Appl. Sci. 2020, 2, 2115. [Google Scholar] [CrossRef]
- Ahmed, A.; Soubra, A.H. Probabilistic analysis of strip footings resting on a spatially random soil using subset simulation approach. Georisk Assess. Manag. Risk Eng. Syst. Geohazards 2012, 6, 188–201. [Google Scholar] [CrossRef] [Green Version]
- Savvides, A.A.; Papadrakakis, M. A computational study on the uncertainty quantification of failure of clays with a modified Cam-Clay yield criterion. SN Appl. Sci. 2021, 3, 659. [Google Scholar] [CrossRef]
- Mercado, V.; Ochoa-Cornejo, F.; Astroza, R.; El-Sekelly, W.; Abdoun, T.; Pastén, C.; Pastén, F. Uncertainty quantification and propagation in the modeling of liquefiable sands. Soil Dyn. Earthq. Eng. 2019, 123, 217–229. [Google Scholar] [CrossRef]
- Najjar, S.S.; Sadek, S.; Alcovero, A. Quantification of model uncertainty in shear strength predictions for fiber-reinforced sand. J. Geotech. Geoenviron. Eng. 2013, 139, 116–133. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Chan, A.H.C.; Pastor, M.; Paul, D.K.; Shiomi, T. Static and dynamic behaviour of soils: A rational approach to quantitative solutions. I. Fully saturated problems. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. R. Soc. 1990, 429, 285–309. [Google Scholar]
- Zienkiewicz, O.C.; Taylor, R.L. The Finite Element Method; McGraw-Hill: London, UK, 1977. [Google Scholar]
- Marcuson, W.F. Definition of terms related to liquefaction. J. Geotech. Eng. Div. 1978, 104, 1197–1200. [Google Scholar]
- Tang, L. Study on p-y Curve Models for Pile-Soil Dynamic Interactions in Liquefied Ground; Harbin Institute of Technology: Harbin, China, 2010. (In Chinese) [Google Scholar]
- Mori, S.; Namuta, A.; Miwa, S. Feature of liquefaction damage during the 1993 Hokkaido Nanseioki earthquake. In Proceedings of the 29th Annual Conference of Japanese Society of Soil Mechanics and Foundation Engineering, New Delhi, India, June 1994; pp. 1005–1008. [Google Scholar]
- Cao, Z.; Hou, L.; Yuan, X.; Sun, R.; Wang, W.; Chen, L. Characteristics of liquefaction-induced damages during Wenchuan Ms 8.0 earthquake. Rock Soil Mech. 2010, 31, 3549–3555, (In Chinese with English Abstract). [Google Scholar]
- Cao, Z.; Youd, T.L.; Yuan, X. Gravelly soils that liquefied during 2008 Wenchuan, China earthquake, Ms = 8.0. Soil Dyn. Earthq. Eng. 2011, 31, 1132–1143. [Google Scholar] [CrossRef]
- Huang, Y.; Jiang, X.M. Field-observed phenomena of seismic liquefaction and subsidence during the 2008 Wenchuan earthquake. Nat. Hazards 2010, 54, 839–850. [Google Scholar] [CrossRef]
- Ishihara, K.; Yasuda, S.; Yoshida, Y. Liquefaction-induced flow failure of embankment and residual strength of silty sand. Soils Found 1990, 30, 69–80. [Google Scholar] [CrossRef] [Green Version]
- Hamada, M.; Sato, H.; Kawakami, T. A consideration of the mechanism for liquefaction-related large ground displacement. In Proceedings of the Fifth U.S.–Japan Workshop on Earthquake Resistant Design of Lifeline Facilities and Countermeasures Against Soil Liquefaction, Salt Lake City, UT, USA, 29 September–1 October 1994; pp. 217–232. [Google Scholar]
- Finn, W.D.L.; Fujita, N. Piles in liquefiable soils: Seismic analysis and design issues. Soil Dyn. Earthq. Eng. 2002, 22, 731–742. [Google Scholar] [CrossRef]
- Biot, M.A. General solutions of the Equations of elasticity and consolidation for a porous material. Appl. Mech. 1956, 23, 91–96. [Google Scholar] [CrossRef]
- Biot, M.A. Theory of propagation of elastic waves in a fluid-saturated porous solid. I. Low-frequency range. Acoust. Soc. Am. 1956, 28, 168–178. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Chang, C.T.; Bettess, P. Drained, undrained, consolidating, and dynamic behavior assumptions in soils: Limits of validity. Geotechnique 1980, 30, 385–395. [Google Scholar] [CrossRef]
- Simon, B.R.; Zienkiewicz, O.C.; Paul, D.K. An analytical solution for the transient response of saturated porous elastic solids. Numer. Anal. Methods Geomech. 1984, 8, 381–398. [Google Scholar] [CrossRef]
- Newmark, N.M. A method of computation for structural dynamics. J. Eng. Mech. Div. 1959, 85, 67–94. [Google Scholar] [CrossRef]
- Wilson, E.L.; Farhoomand, I.; Bathe, K.J. Nonlinear dynamic analysis of complex structures. Earthq. Eng. Struct. Dyn. 1972, 1, 241–252. [Google Scholar] [CrossRef]
- Chung, J.; Hulbert, G.M. A time integration algorithm for structural dynamics with improved numerical dissipation. Gen.-Method J. Appl. Mech. 1993, 60, 371–375. [Google Scholar] [CrossRef]
- Kontoe, S.; Zdravkovic, L.; Potts, D.M. An assessment of time integration schemes for dynamic geotechnical problems. Comput. Geotech. 2008, 35, 253–264. [Google Scholar] [CrossRef] [Green Version]
- Zhao, C.; Li, W.; Wang, J. An explicit finite element method for Biot dynamic formulation in fluid-saturated porous media and its application to a rigid foundation. J. Sound Vib. 2005, 282, 1169–1181. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, C.; Du, X. An explicit integration scheme for solving dynamic problems of solid and porous media. J. Earthq. Eng. 2008, 12, 293–311. [Google Scholar] [CrossRef]
- Simon, B.R.; Wu, J.S.S.; Zienkiewicz, O.C.; Paul, D.K. Evaluation of u-w and u-π finite element methods for the dynamic response of saturated porous media using one-dimensional models. Int. J. Numer. Anal. Methods Geomech. 1986, 10, 461–482. [Google Scholar] [CrossRef]
- Prevost, J.H. Wave propagation in fluid-saturated porous media: An efficient finite element procedure. Soil Dyn. Earthq. Eng. 1985, 4, 183–201. [Google Scholar] [CrossRef]
- Park, K.C. Stabilization of partitioned solution procedure for pore fluid-soil interaction analysis. Int. J. Numer. Methods Eng. 1983, 19, 1669–1673. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Paul, D.K.; Chan, A.H.C. Unconditionally stable staggered solution procedure for soil-pore fluid interaction problems. Int. J. Numer. Methods Eng. 1988, 26, 1039–1055. [Google Scholar] [CrossRef]
- Huang, M.S.; Zienkiewicz, O.C. New unconditionally stable staggered solution procedures for coupled soil-pore fluid dynamic problems. Int. J. Numer. Methods Eng. 1998, 45, 1029–1052. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Huang, M.S.; Wu, J.; Wu, S.M. A new algorithm for the coupled soil-pore fluid problem. Shock. Vib. 1993, 1, 3–14. [Google Scholar] [CrossRef]
- Huang, M.S.; Wu, S.M.; Zienkiewicz, O.C. Incompressible or nearly incompressible soil dynamic behavior—A new staggered algorithm to circumvent restrictions of mixed formulation. Soil Dyn. Earthq. Eng. 2001, 21, 169–179. [Google Scholar] [CrossRef]
- Pastor, M.; Li, T.; Liu, X.; Zienkiewicz, O.C.; Quecedo, M. A fractional step algorithm allowing equal order of interpolation for coupled analysis of saturated soil problems. Mech. Cohesive-Frict. Mater. 2000, 5, 511–534. [Google Scholar] [CrossRef]
- Li, X.K.; Han, X.H.; Pastor, M. An iterative stabilized fractional step algorithm for finite element analysis soil dynamics. Comput. Methods Appl. Mech. Eng. 2003, 192, 3845–3859. [Google Scholar] [CrossRef]
- Li, X.K.; Zhang, X.; Han, X.L.; Sheng, D.C. An iterative pressure-stabilized fractional step algorithm in saturated soil dynamics. Int. J. Numer. Anal. Methods Geomech. 2010, 34, 733–753. [Google Scholar] [CrossRef]
- Teahyo, P.; Moonho, T. A new coupled analysis for nearly incompressible and inpermeable saturated porous media on mixed finite element method: I. Proposed method. KSCE J. Civ. Eng. 2010, 14, 7–16. [Google Scholar]
- Soares, D.; Rodrigues, G.G.; Gonçalves, K.A. An efficient multi-time-step implicit-explicit method to analyze solid-fluid coupled systems discretized by unconditionally stable time-domain finite element procedures. Comput. Struct. 2010, 88, 387–394. [Google Scholar] [CrossRef]
- Xu, C.S.; Song, J.; Du, X.L.; Zhong, Z.L. A completely explicit finite element method for solving dynamic u-p Equations of fluid-saturated porous media. Soil Dyn. Earthq. Eng. 2017, 97, 364–376. [Google Scholar] [CrossRef]
- Tang, X.W.; Zhang, X.W.; Uzuoka, R. Novel adaptive time stepping method and its application to soil seismic liquefaction analysis. Soil Dyn. Earthq. Eng. 2015, 71, 100–113. [Google Scholar] [CrossRef]
- Xu, C.S.; Song, J.; Du, X.L.; Zhao, M. A local artificial-boundary condition for simulating transient wave radiation in fluid-saturated porous media of infinite domains. Int. J. Numer. Methods Eng. 2017, 112, 529–552. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Chan, A.H.C.; Pastor, M.; Schrefler, B.A.; Shiomi, T. Computational Geomechanics; Wiley: Chichester, UK, 1999. [Google Scholar]
- Zhao, C.; Li, W.; Wang, J. An explicit finite element method for dynamic analysis in fluid saturated porous medium-elastic single-phase medium-ideal fluid medium coupled systems and its application. J. Sound Vib. 2005, 282, 1155–1168. [Google Scholar] [CrossRef]
- Mazzoni, S.; McKenna, F.; Scott, M.H.; Fenves, G.L. OpenSees Command Language Manual. Pacific Earthquake Engineering Research Center; University of California: Berkeley, CA, USA, 2007. [Google Scholar]
- McKenna, F.T. Object-Oriented Finite Element Programming: Frameworks for Analysis, Algorithms and Parallel Computing; University of California: Berkeley, CA, USA, 1997. [Google Scholar]
- Du, X.L.; Wang, J.T. An explicit difference formulation of dynamic response calculation of elastic structure with damping. Eng. Mech. 2000, 17, 37–43. [Google Scholar]
- Akiyoshi, T.; Fuchida, K.; Fang, H.L. Absorbing boundary conditions for dynamic analysis of fluid-saturated porous media. Soil Dyn. Earthq. Eng. 1994, 13, 387–397. [Google Scholar] [CrossRef]
- Yang, Z.; Lu, J.; Elgamal, A. OpenSees Soil Models and Solid-Fluid Fully Coupled Elements User’s Manual; University of California: San Diego, CA, USA, 2008. [Google Scholar]
- Yang, Z.H.; Elgamal, A. Command Manual and User Reference for OpenSees Soil Models and Fully Coupled Element Developed; University of California: San Diego, CA, USA, 2003. [Google Scholar]
- Elgamal, A.; Yang, Z.H.; Parra, E.; Ragheb, A. Modeling of cyclic mobility in saturated cohesionless soils. Int. J. Plast. 2003, 19, 883–905. [Google Scholar] [CrossRef]
- Yang, Z.; Elgamal, A. Numerical Modeling of Earthquake Site Response Including Dilation and Liquefaction; Columbia University: New York, NY, USA, 2000. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Basic Material Parameters | |||
|---|---|---|---|
| Parameter | Value | ||
| ES | 3000 Pa | Young’s modulus | |
| ρ | 0.306 kg/m3 | Density of two-phase media | |
| ρf | 0.2977 kg/m3 | Density of fluid-phase | |
| n | 0.333 | Porosity | |
| ν | 0.2 | Poisson’s ratio | |
| 0.004883 m3s/kg | Dynamic permeability coefficient | ||
| λ | 833.3 Pa | Lame’s constants of the soil skeleton | |
| G | 1250 Pa | Shear modulus | |
| Variable material parameters considered in the example | |||
| Parameter Parameters | No. 1 | No. 2 | |
| Kf | 0.3999 × 105 Pa | 0.6106 × 105 Pa | Bulk modulus of pore fluid |
| Ks | ∞ | 0.5005 × 104 Pa | Bulk modulus of soil skeleton |
| Qb | 0.1201 × 106 Pa | 0.1385 × 105 Pa | Compressibility coefficient of pore fluid |
| Wave propagation velocity in saturated soil | |||
| Parameter | Actual wave velocity | ||
| No. 1 | No. 2 | ||
| Cp | 635.12 m/s | 176.15 m/s | P wave velocity |
| Cs | 63.92 m/s | 89.69 m/s | S wave velocity |
| Loose Sand Layer | Dense Sand Layer | |
|---|---|---|
| Element thickness | 1.0 m | 1.0 m |
| Vertical gravitational acceleration | −9.81 m/s2 | −9.81 m/s2 |
| Liquid-phase undrained bulk modulus | 4.4 × 106 kPa | 7.3 × 106 kPa |
| Horizontal permeability coefficient | 1 × 10−4 m/s | 1 × 10−5 m/s |
| Vertical permeability coefficient | 1 × 10−4 m/s | 1 × 10−5 m/s |
| Parameters | Loose Sand Layer | Dense Sand Layer |
|---|---|---|
| 1.7 ton/m3 | 1.9 ton/m3 | |
| 3.57 × 104 kPa | 2.59 × 104 kPa | |
| 8 × 104 kPa | 6 × 104 kPa | |
| 33.5 | 31 | |
| 0.1 | 0.1 | |
| Pressure coefficient n | 0.5 | 0.5 |
| 25.5 | 31 | |
| 0.045 | 0.087 | |
| 0.15 | 0.18 | |
| 0.06 | 0.0 | |
| 0.15 | 0.0 | |
| Number of yield surface | 20 | 20 |
| 5 | 5 | |
| 3 | 3 | |
| 1 kPa | 1 kPa | |
| 0.0 | 0.0 | |
| Initial void ratio e | 0.6 | 0.6 |
| Cs 1 | 0.9 | 0.9 |
| Cs2 | 0.02 | 0.02 |
| Cs 3 | 0.7 | 0.7 |
| Standard pressure | 101 | 101 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, J.; Xu, C.; Feng, C.; Wang, F. An Explicit Finite Element Method for Saturated Soil Dynamic Problems and Its Application to Seismic Liquefaction Analysis. Appl. Sci. 2022, 12, 4586. https://doi.org/10.3390/app12094586
Song J, Xu C, Feng C, Wang F. An Explicit Finite Element Method for Saturated Soil Dynamic Problems and Its Application to Seismic Liquefaction Analysis. Applied Sciences. 2022; 12(9):4586. https://doi.org/10.3390/app12094586
Chicago/Turabian StyleSong, Jia, Chengshun Xu, Chaoqun Feng, and Fujie Wang. 2022. "An Explicit Finite Element Method for Saturated Soil Dynamic Problems and Its Application to Seismic Liquefaction Analysis" Applied Sciences 12, no. 9: 4586. https://doi.org/10.3390/app12094586