
Research on Identification Technology of Field Pests with Protective Color Characteristics

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
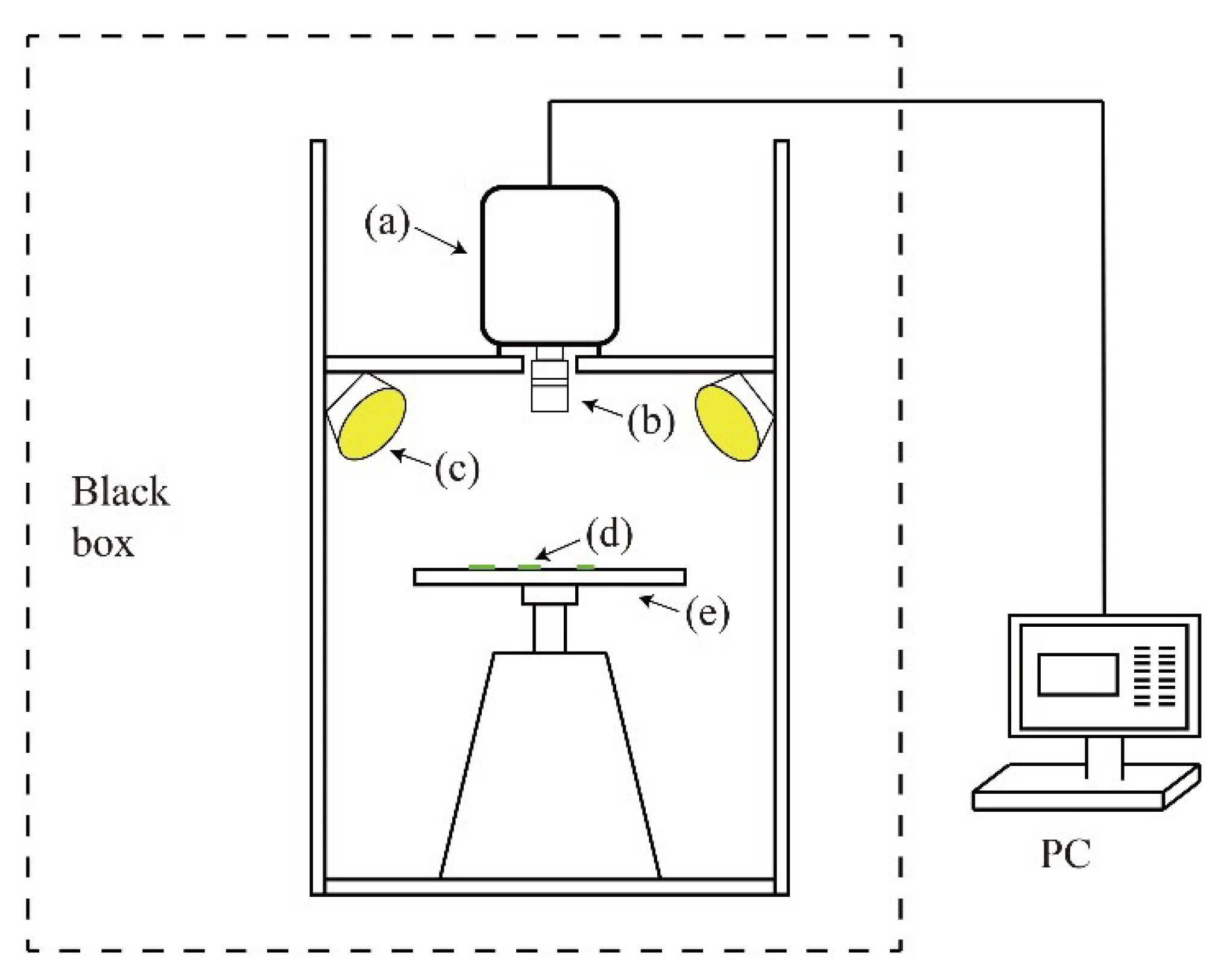
2.1. Hyperspectral Test
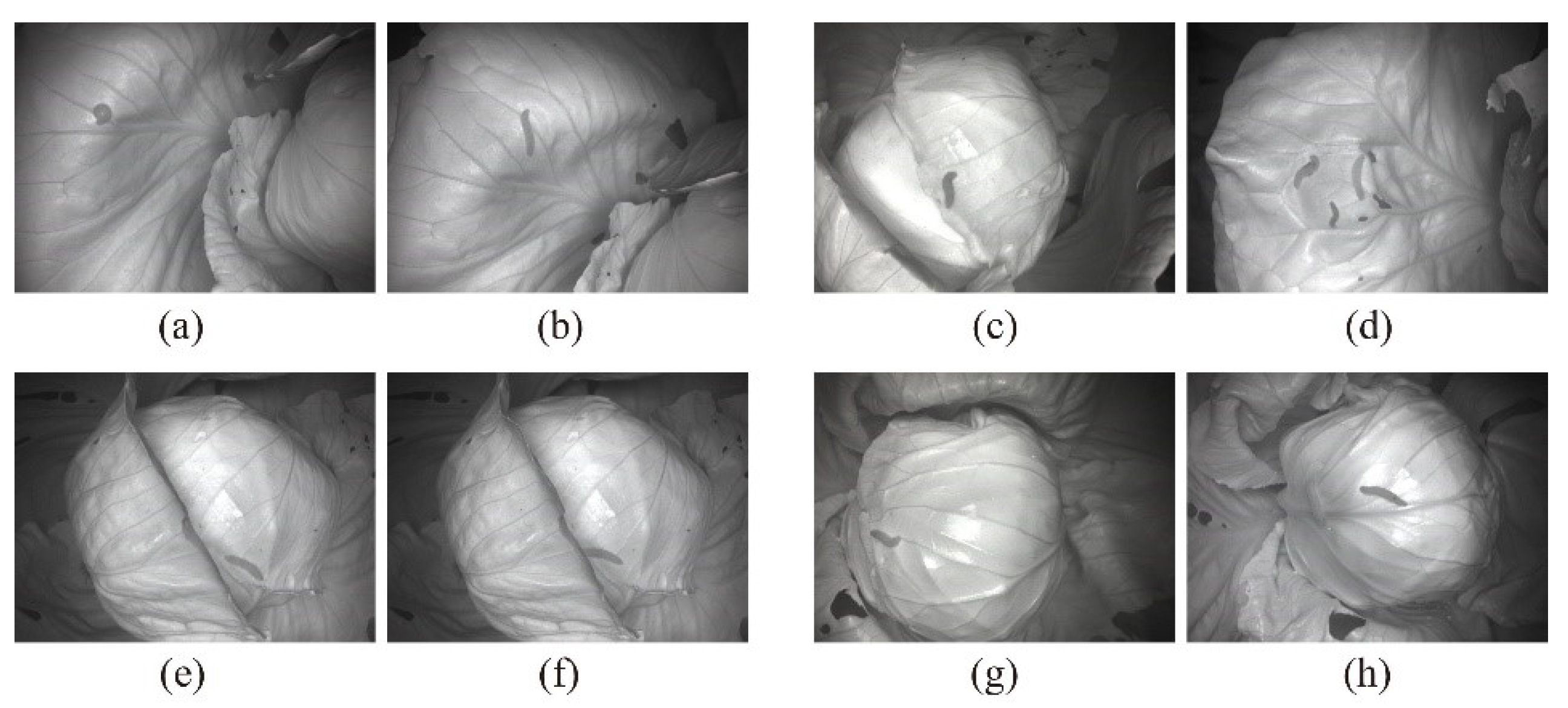
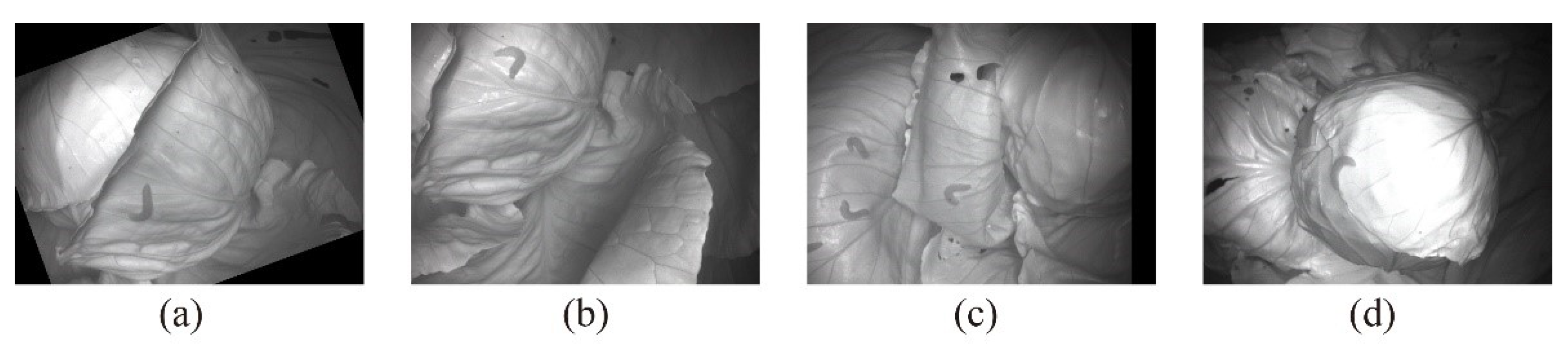
2.2. Pest Image Data Set
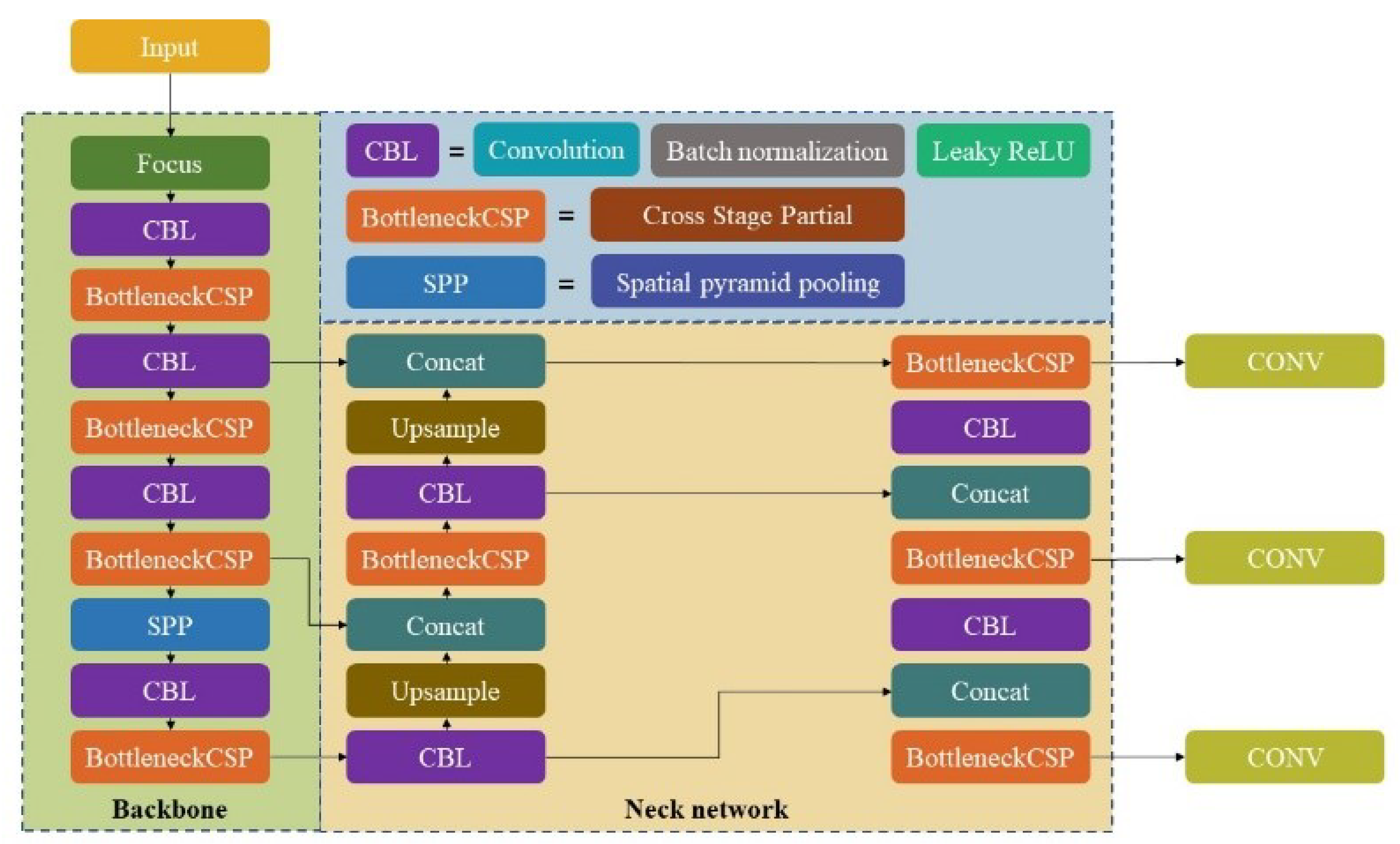
2.3. Pest Identification Model
3. Results and Discussions
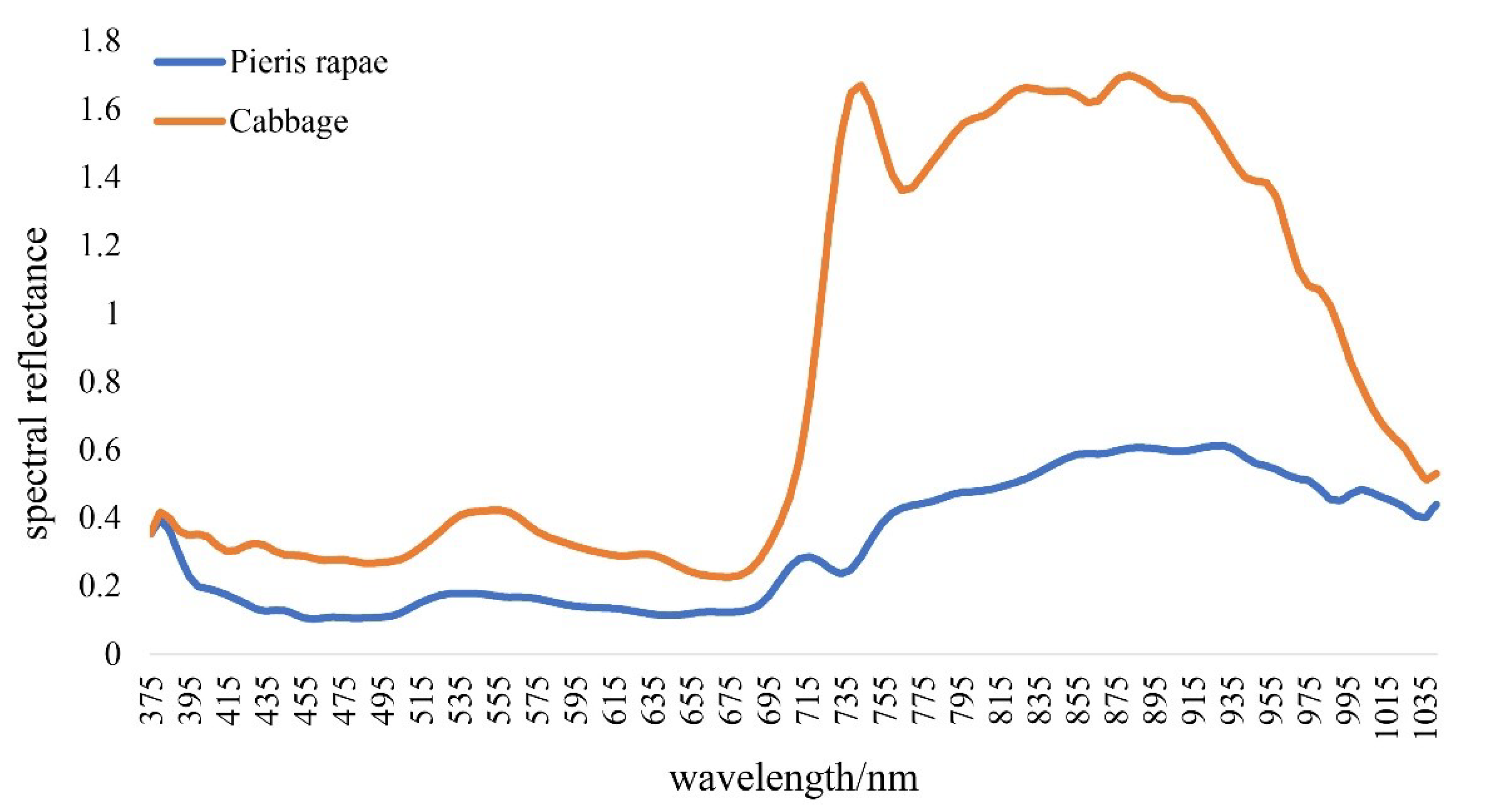
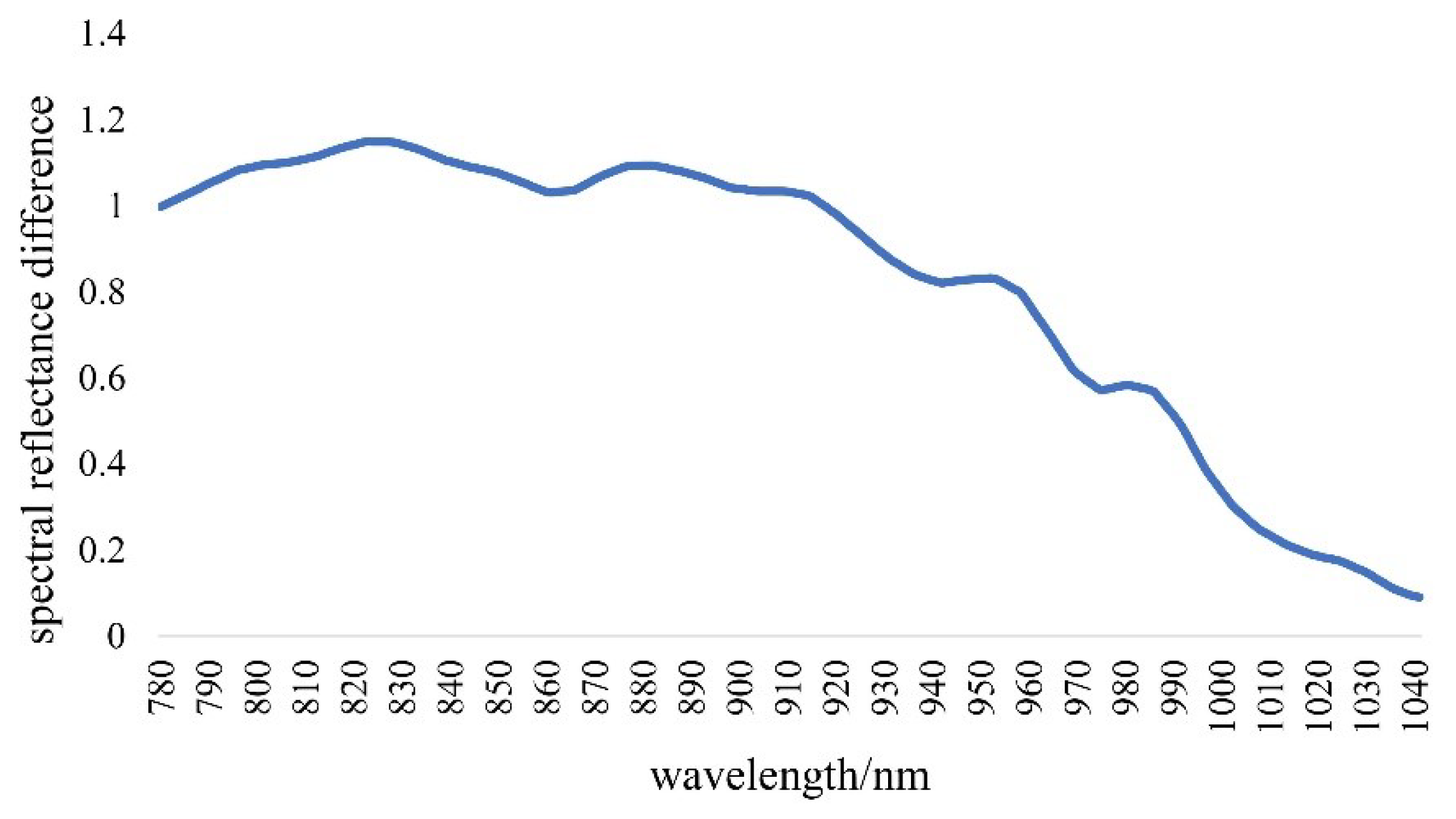
3.1. Comparison and Analysis of Spectral Characteristics
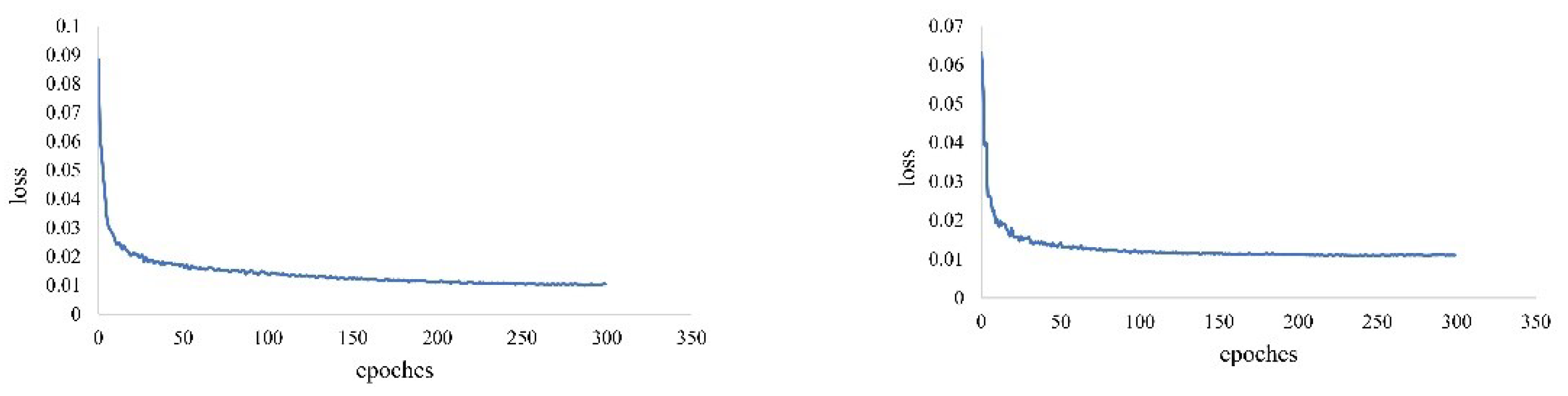
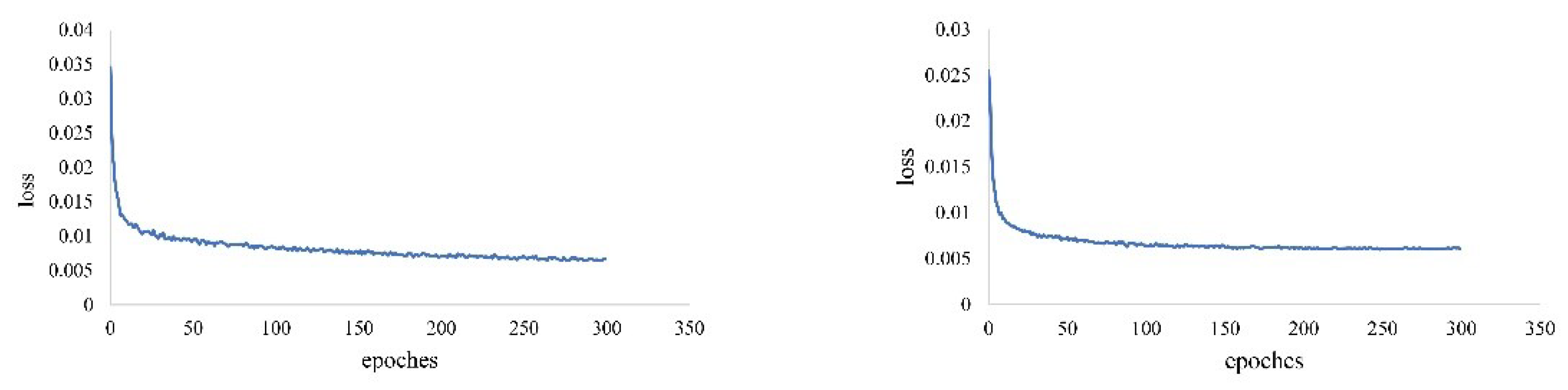
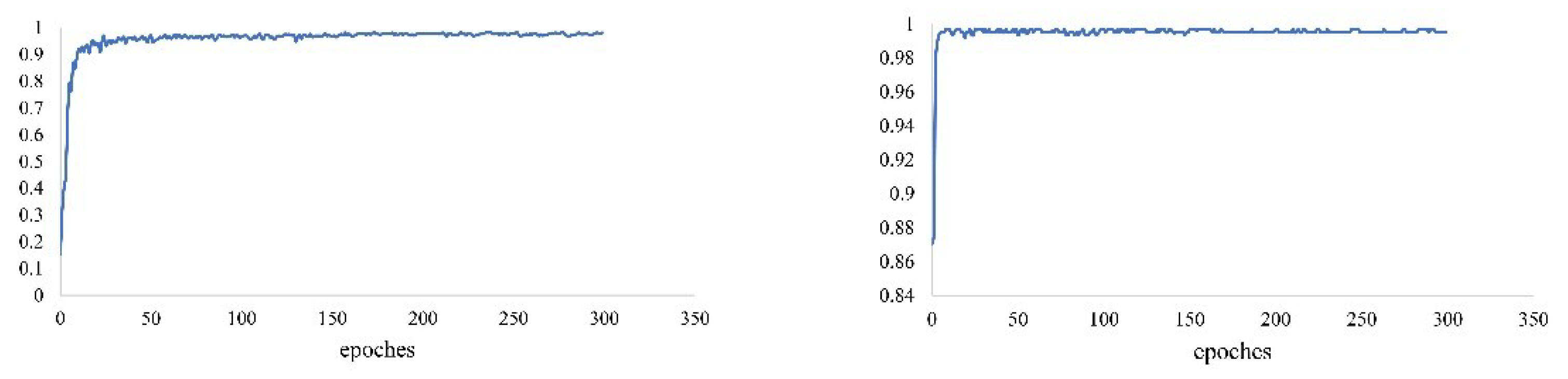
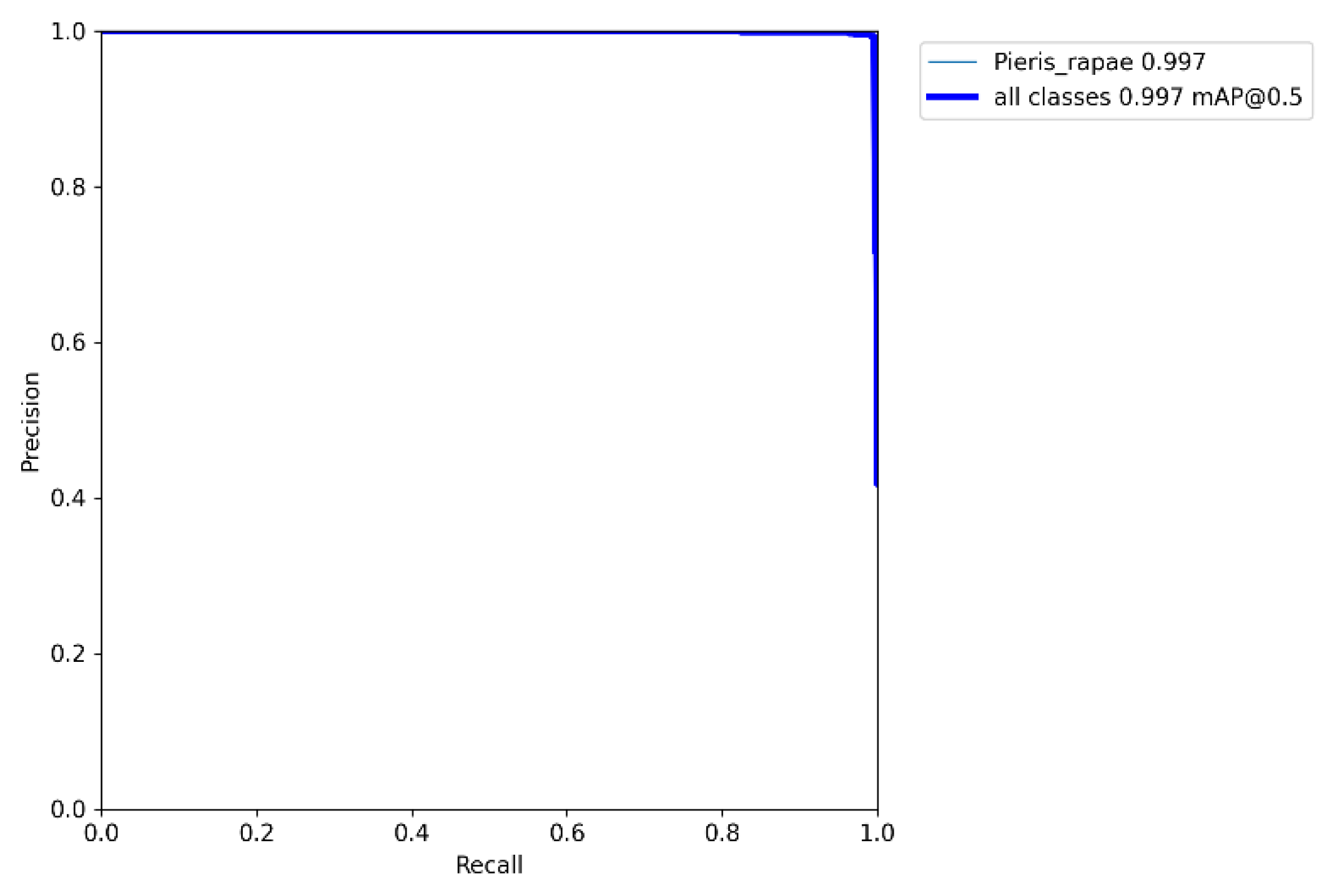
3.2. Model Training and Performance Evaluation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yao, Q.; Chen, G.T.; Wang, Z.; Zhang, C.; Yang, B.J.; Tang, J. Automated detection and identification of white-backed planthoppers in paddy fields using image processing. J. Integr. Agric. 2017, 16, 1547–1557. [Google Scholar] [CrossRef]
- Feng, H.Q.; Yao, Q. Automatic identification and monitoring technologies of agricultural pest insects. Plant Prot. 2018, 44, 127–133. [Google Scholar]
- Li, W.Y.; Li, M.; Chen, M.X.; Qian, J.P.; Sun, C.H.; Du, S.F. Feature extraction and classification method of multi-pose pests using machine vision. Trans. Chin. Soc. Agric. Eng. 2014, 30, 154–162. [Google Scholar]
- Chen, M.X.; Yang, X.T.; Shi, B.C.; Li, W.Y.; Du, X.W.; Li, M.; Sun, C.H. Research progress and prospect of technologies for automatic identifying and counting of pests. J. Environ. Entomol. 2015, 37, 176–183. [Google Scholar]
- Tian, R.; Chen, M.X.; Dong, D.M.; Li, W.Y.; Jiao, L.Z.; Wang, Y.Z.; Li, M.; Sun, C.H.; Yang, X.T. Identification and counting method of orchard pests based on fusion method of infrared sensor and machine vision. Trans. Chin. Soc. Agric. Eng. 2016, 32, 195–201. [Google Scholar]
- He, H.M.; Liu, L.N.; Munir, S.; Bashir, N.H.; Wang, Y.; Yang, J.; Li, C.Y. Crop diversity and pest management in sustainable agriculture. J. Integr. Agric. 2019, 18, 1945–1952. [Google Scholar] [CrossRef]
- Dong, W.; Qian, R.; Zhang, J.; Zhang, L.P.; Chen, H.B.; Zhang, M.; Zhu, J.B.; Bu, Y.Q. Vegetable lepidopteran pest auto recognition and detection counting based on deep learning. J. Agric. Sci. Technol. 2019, 21, 76–84. [Google Scholar]
- Lyu, Z.W.; Jin, H.F.; Zhen, T.; Sun, F.Y. Application development of image processing technologies in grain pests identification. J. Henan Univ. Technol. (Nat. Sci. Ed.) 2021, 42, 128–137. [Google Scholar]
- Lu, S.H.; Ye, S.J. Using an image segmentation and support vector machine method for identifying two locust species and instars. J. Integr. Agric. 2020, 19, 1301–1313. [Google Scholar] [CrossRef]
- Zhang, G.C.; Zhang, D.X.; Li, B.L.; Sun, Y.G. Present situation and prospects of storage pests based on vision inspection technology. J. Chin. Cereals Oils Assoc. 2014, 29, 124–128. [Google Scholar]
- Zhang, W.F.; Guo, M. Stored grain insect image segmentation method based on graph cuts. Sci. Technol. Eng. 2010, 10, 1661–1664. [Google Scholar]
- Ebrahimia, M.A.; Khoshtaghaza, M.H.; Minaei, S.; Jamshidi, B. Vision-based pest detection based on SVM classification method. Comput. Electron. Agric. 2017, 137, 52–58. [Google Scholar] [CrossRef]
- Yao, Q.; Lv, J.; Liu, Q.J.; Diao, G.Q.; Yang, B.J.; Chen, H.M.; Tang, J. An insect imaging system to automate rice light-trap pest identification. J. Integr. Agric. 2012, 11, 978–985. [Google Scholar] [CrossRef]
- Wen, C.L.; Guyer, D.E.; Li, W. Local feature-based identification and classification for orchard insects. Biosyst. Eng. 2009, 104, 299–307. [Google Scholar] [CrossRef]
- Zhang, S.W.; Shao, Y.; Qi, G.H.; Xu, X.H. Crop pest detection based on multi-scale convolutional network with attention. Jiangsu J. Agric. Sci. 2021, 37, 579–588. [Google Scholar]
- Luo, Q.; Huang, R.L.; Zhu, Y. Real-time monitoring and prewarning system for grain storehouse pests based on deep learning. J. Jiangsu Univ. (Nat. Sci. Ed.) 2019, 40, 203–208. [Google Scholar]
- Zhang, D.X.; Zhao, W.J. The classification of stored grain pests based on convolutional neural network. In Proceedings of the 2nd International Conference on Mechatronics and Information Technology (ICMIT), Dalian, China, 13–14 May 2017. [Google Scholar]
- Lu, J.; Wang, J.L.; Zhu, S.H.; He, R.Y. Classification of rice planthoppers image based on feature optimization. J. Nanjing Agric. Univ. 2019, 42, 767–774. [Google Scholar]
- Zhang, Y.S.; Zhao, Y.D.; Yuan, M.C. Insect identification and counting based on an improved Faster-RCNN model of the sticky board image. J. China Agric. Univ. 2019, 24, 115–122. [Google Scholar]
- Patel, D.J.; Bhatt, N. Insect identification among deep learning’s meta-architectures using TensorFlow. Int. J. Eng. Adv. Technol. 2019, 9, 1910–1914. [Google Scholar] [CrossRef]
- Thenmozhi, K.; Reddy, U.S. Crop pest classification based on deep convolutional neural network and transfer learning. Comput. Electron. Agric. 2019, 164, 104906. [Google Scholar] [CrossRef]
- Rustia, D.J.A.; Lin, C.E.; Chung, J.Y.; Lin, T.T. A real-time multi-class insect pest identification method using cascaded convolutional neural networks. In Proceedings of the 9th International Symposium on Machinery and Mechatronics for Agriculture and Biosystems Engineering (ISMAB), Jeju, Korea, 28 May 2018. [Google Scholar]
- Bastide, B.; Porter, G.; Renshaw, A. Detection of latent bloodstains at fire scenes using reflected infrared photography. Forensic Sci. Int. 2019, 302, 109874. [Google Scholar] [CrossRef] [PubMed]
- Wu, X. Study on Identification of Pests Based on Machine Vision. Ph.D. Thesis, Zhejiang University, Hangzhou, China, April 2016. [Google Scholar]
- Perez, M.J.; Throne, J.E.; Dowell, F.E.; Baker, J.E. Chronological age-grading of three species of stored-product beetles by using near-infrared spectroscopy. J. Econ. Entomol. 2004, 97, 1159–1167. [Google Scholar] [CrossRef]
- Zhang, Y.F.; Yu, G.Y.; Han, L.; Guo, T.T. Identification of four moth larvae based on near-infrared spectroscopy technology. Spectrosc. Lett. 2015, 48, 1–6. [Google Scholar] [CrossRef]
- Kaya, T.S.; Huck, C.W. A review of mid-infrared and near-infrared imaging: Principles, concepts and applications in plant tissue analysis. Molecules 2017, 22, 168. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Amir, A.; Ehsan, A.; Seyedeh, M.K.; Yu, H.; Seunghoon, H.; Andrei, F. Miniature optical planar camera based on a wide-angle metasurface doublet corrected for monochromatic aberrations. Nat. Commun. 2016, 7, 13682. [Google Scholar]
- Li, J.; Han, Z.; Wang, W.L.; Cui, Y.R. OverFeat model for vegetation classification in Nanhui tidal flat of the Yangtze Estuary. Ecol. Sci. 2019, 38, 135–141. [Google Scholar]
- Li, Y.J.; Xiang, Y.; Yang, Z.X.; Han, X.Z.; Lin, J.W.; Hu, Z.F. A laser irradiation method for controlling Pieris rapae larvae. Appl. Sci. 2021, 11, 9533. [Google Scholar] [CrossRef]
- Di, J.; Qu, J.H. A detection method for apple leaf diseases based on Tiny-YOLO. J. Shandong Norm. Univ. (Nat. Sci.) 2020, 35, 78–83. [Google Scholar]
- Pu, W.; Xiao, B.; Zhang, K.J.; Hou, T.P. The pilot studies on the screening and bioactivity of insecticidal plants against Pieris rapae (L). J. Sichuan Univ. (Nat. Sci. Ed.) 2004, 1, 184–188. [Google Scholar]
- Ren, D.; Yu, H.Y.; Fu, W.W.; Zhang, B.; Ji, Q. Crop diseases and pests monitoring based on remote sensing: A survey. In Proceedings of the 2010 Conference on Dependable Computing, Yichang, China, 20–22 November 2010. [Google Scholar]
- Shi, Y.; Huang, W.J.; Luo, J.H.; Huang, L.S.; Zhou, X.F. Detection and discrimination of pests and diseases in winter wheat based on spectral indices and kernel discriminant analysis. Comput. Electron. Agric. 2017, 141, 171–180. [Google Scholar] [CrossRef]
- Zhang, Y.J. Image recognition of agricultural pest based on improved support vector machine. J. Chin. Agric. Mech. 2021, 42, 146–152. [Google Scholar]
- Zhu, L.; Luo, J.; Xu, S.Y.; Yang, Y.; Zhao, H.T.; Li, W.H. Machine vision recognition of rapeseed pests based on color feature. J. Agric. Mech. Res. 2016, 38, 55–58. [Google Scholar]
- Zhong, C.Y.; Li, X.; Liang, C.B.; Xue, Y.Z. A cabbage caterpillar detection method based on computer vision. Shanxi Electron. Technol. 2020, 164, 84–86. [Google Scholar]
- Gao, X.; Tang, Y.; Chen, T.Y.; Cui, H.M.; Wang, H.B. Research on cabbage pest identification based on image processing. Jiangsu Agric. Sci. 2017, 45, 235–238. [Google Scholar]
- Song, G.L.; Yu, J.L.; Liu, F.; He, Y.; Chen, D.; Mo, W.C. Study on the live state of Pieris rapaes using near infrared hyperspectral imaging technology. Spectrosc. Spectral Anal. 2014, 34, 2225–2228. [Google Scholar]
- Qiao, X.J.; Jiang, J.B.; Li, H.; Qi, X.T.; Yuan, D.S. Spectral analysis and index models to identify moldy peanuts using hyperspectral images. Spectrosc. Spectr. Anal. 2018, 38, 535–539. [Google Scholar]
- Redmon, J.; Divvala, S.K.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 1 June 2016. [Google Scholar]
- Cui, T.J.; Wang, L.X. Research on application of YOLOv4 object detection algorithm in monitoring on masks wearing of coal miners. J. Saf. Sci. Technol. 2021, 17, 66–71. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Zhao, D.A.; Wu, R.D.; Liu, X.Y.; Zhao, Y.Y. Apple positioning based on YOLO deep convolutional neural network for picking robot in complex background. Trans. Chin. Soc. Agric. Eng. 2019, 35, 164–173. [Google Scholar]
- Yang, L.; Chen, S.X.; Cui, G.H.; Zhu, X.H. Recognition and localization method of workpiece based on improved YOLOv4. Modul. Mach. Tool Autom. Manuf. Tech. 2021, 10, 28–32. [Google Scholar]
- Wu, Z.J.; Chen, H.; Peng, Y.; Song, W. Visual SLAM with lightweight YOLOv5s in dynamic environment. Comput. Eng. 2021, 47, 1–11. [Google Scholar]
- Zhou, F.B.; Zhao, H.L.; Nie, Z. Safety Helmet Detection Based on YOLOv5. In Proceedings of the IEEE International Conference on Power Electronics, Computer Applications (ICPECA), Shenyang, China, 22–24 January 2021. [Google Scholar]
- Kasper-Eulaers, M.; Hahn, N.; Berger, S.; Sebulonsen, T.; Myrland, Ø.; Kummervold, P.E. Detecting heavy goods vehicles in rest areas in winter conditions using YOLOv5. Algorithms 2021, 14, 114. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhang, H.; Chen, L.; Tao, S.X. An image data augmentation algorithm based on convolutional neural networks. Comput. Eng. Sci. 2019, 41, 2007–2016. [Google Scholar]
- Yao, Q.; Feng, J.; Tang, J.; Xu, W.G.; Zhu, X.H.; Yang, B.J.; Lu, J.; Xie, Y.Z.; Yao, B.; Wu, S.Z.; et al. Development of an automatic monitoring system for rice light-trap pests based on machine vision. J. Integr. Agric. 2020, 19, 2500–2513. [Google Scholar] [CrossRef]
- Wu, W.; Yang, T.L.; Li, R.; Chen, C.; Liu, T.; Zhou, K.; Sun, C.M.; Li, C.Y.; Zhu, X.K.; Guo, W.S. Detection and enumeration of wheat grains based on a deep learning method under various scenarios and scales. J. Integr. Agric. 2020, 19, 1998–2008. [Google Scholar] [CrossRef]
- Wu, X.; Zhang, W.Z.; Qiu, Z.J.; Cen, H.Y.; He, Y. A novel method for detection of Pieris rapae larvae on cabbage leaves using NIR hyperspectral imaging. Appl. Eng. Agric. 2016, 32, 311–316. [Google Scholar]
- Gao, X.; Wang, H.C. Research on cabbage rapae pests automatic recognition system based on machine vision. J. Agric. Mech. Res. 2015, 37, 205–208. [Google Scholar]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Z.; Xiang, Y.; Li, Y.; Long, Z.; Liu, A.; Dai, X.; Lei, X.; Tang, Z. Research on Identification Technology of Field Pests with Protective Color Characteristics. Appl. Sci. 2022, 12, 3810. https://doi.org/10.3390/app12083810
Hu Z, Xiang Y, Li Y, Long Z, Liu A, Dai X, Lei X, Tang Z. Research on Identification Technology of Field Pests with Protective Color Characteristics. Applied Sciences. 2022; 12(8):3810. https://doi.org/10.3390/app12083810
Chicago/Turabian StyleHu, Zhengfang, Yang Xiang, Yajun Li, Zhenhuan Long, Anwen Liu, Xiufeng Dai, Xiangming Lei, and Zhenhui Tang. 2022. "Research on Identification Technology of Field Pests with Protective Color Characteristics" Applied Sciences 12, no. 8: 3810. https://doi.org/10.3390/app12083810