
Damage Detection of Continuous Beam Bridge Based on Maximum Successful Approximation Approach of Wavelet Coefficients of Vehicle Response

Abstract
:1. Introduction
2. Theoretical Research on Indirect Measurement Method Based on Vehicle–Bridge Coupling
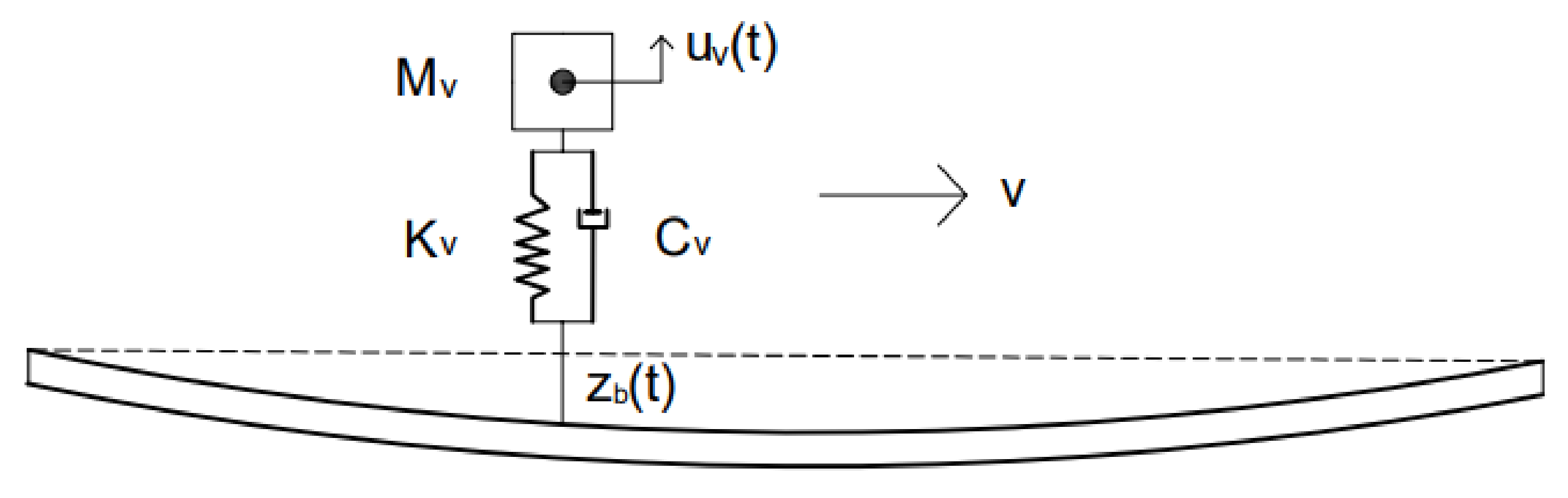
2.1. Theoretical Research on Vehicle–Axle Coupling Vibration
2.2. Theoretical Analysis of Detection Method Based on Vehicle Response
2.3. Wavelet Analysis
2.4. Example Verification
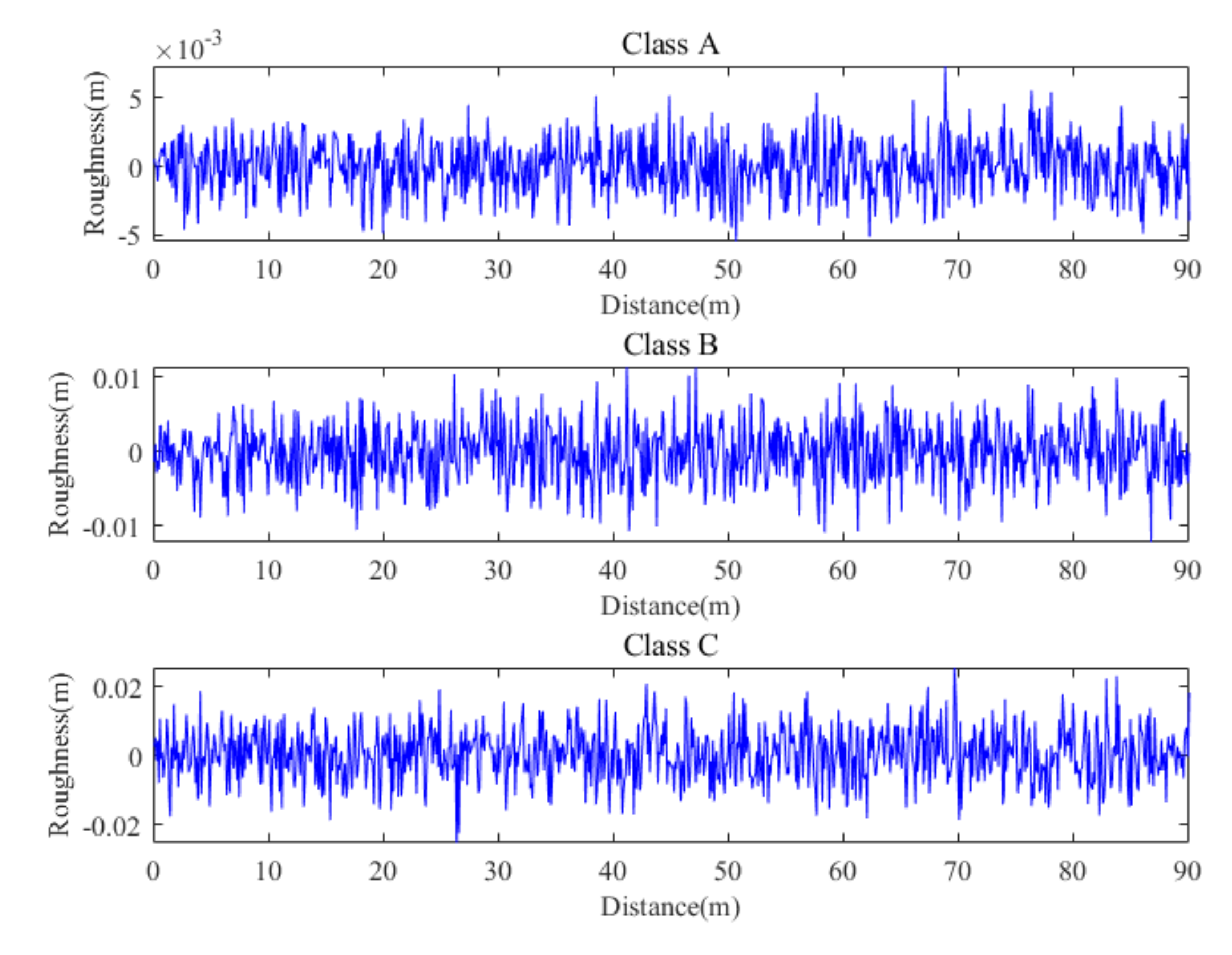
2.5. Influence of Road Roughness
3. Identification of Bridge Damage Location under the Action of Mobile Vehicles
3.1. Theoretical Basis
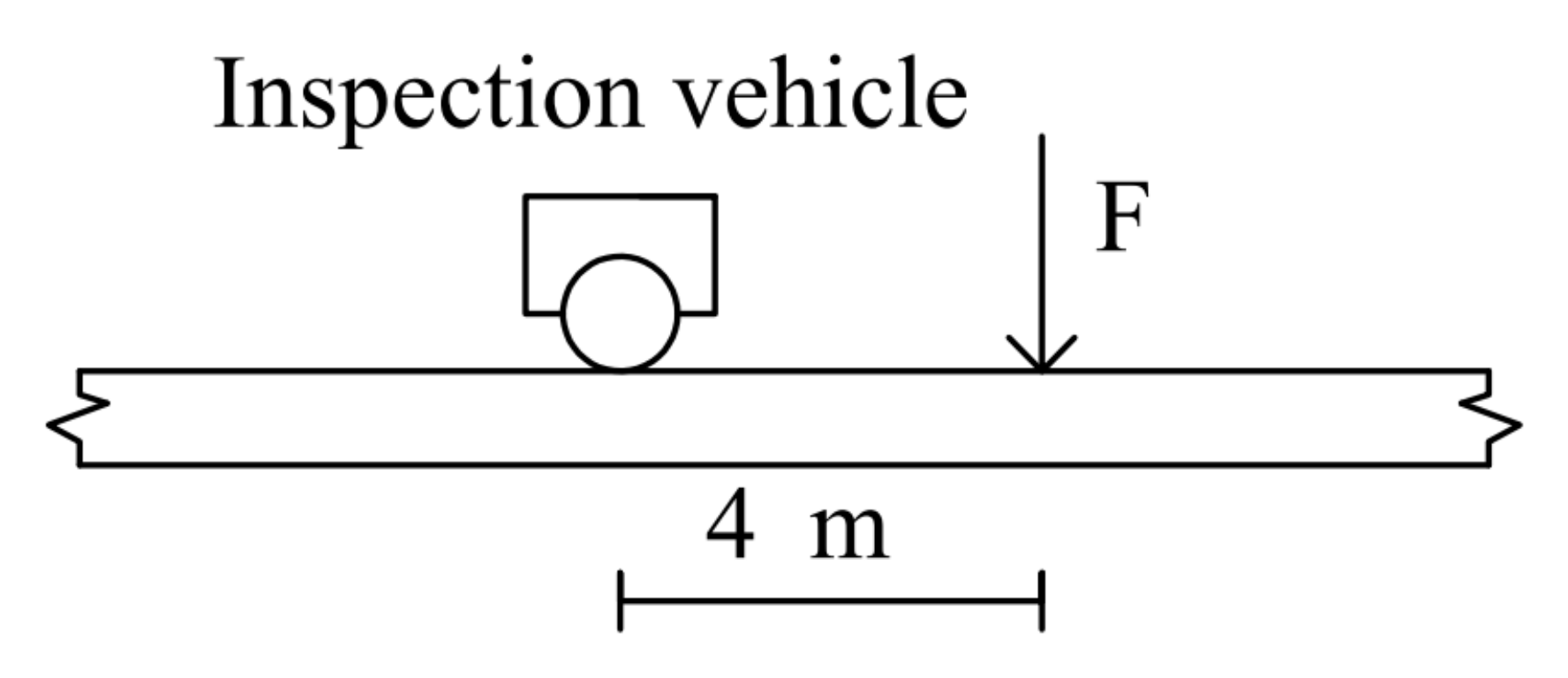
3.2. Model Establishment and Simplification
3.3. Bridge Damage Conditions
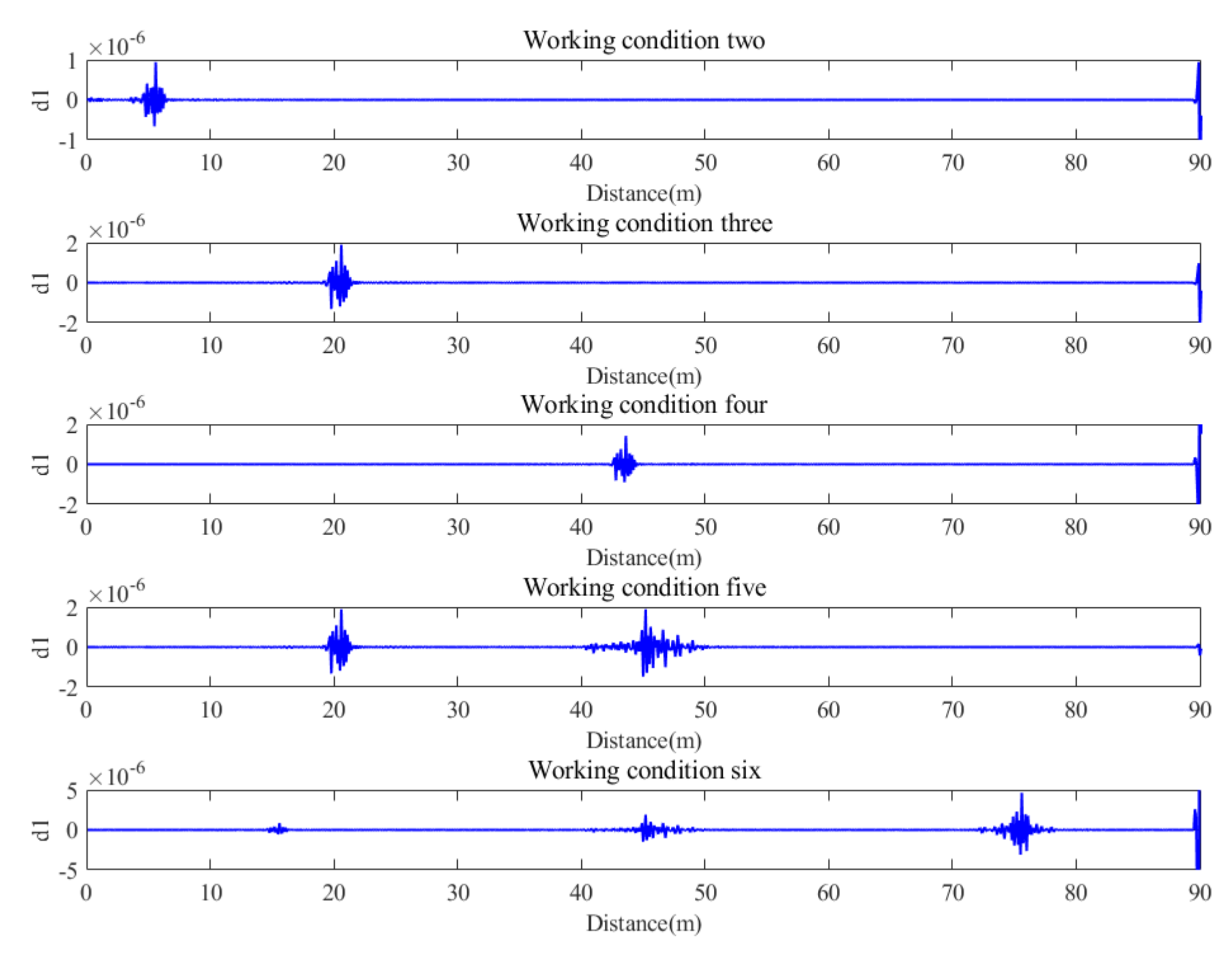
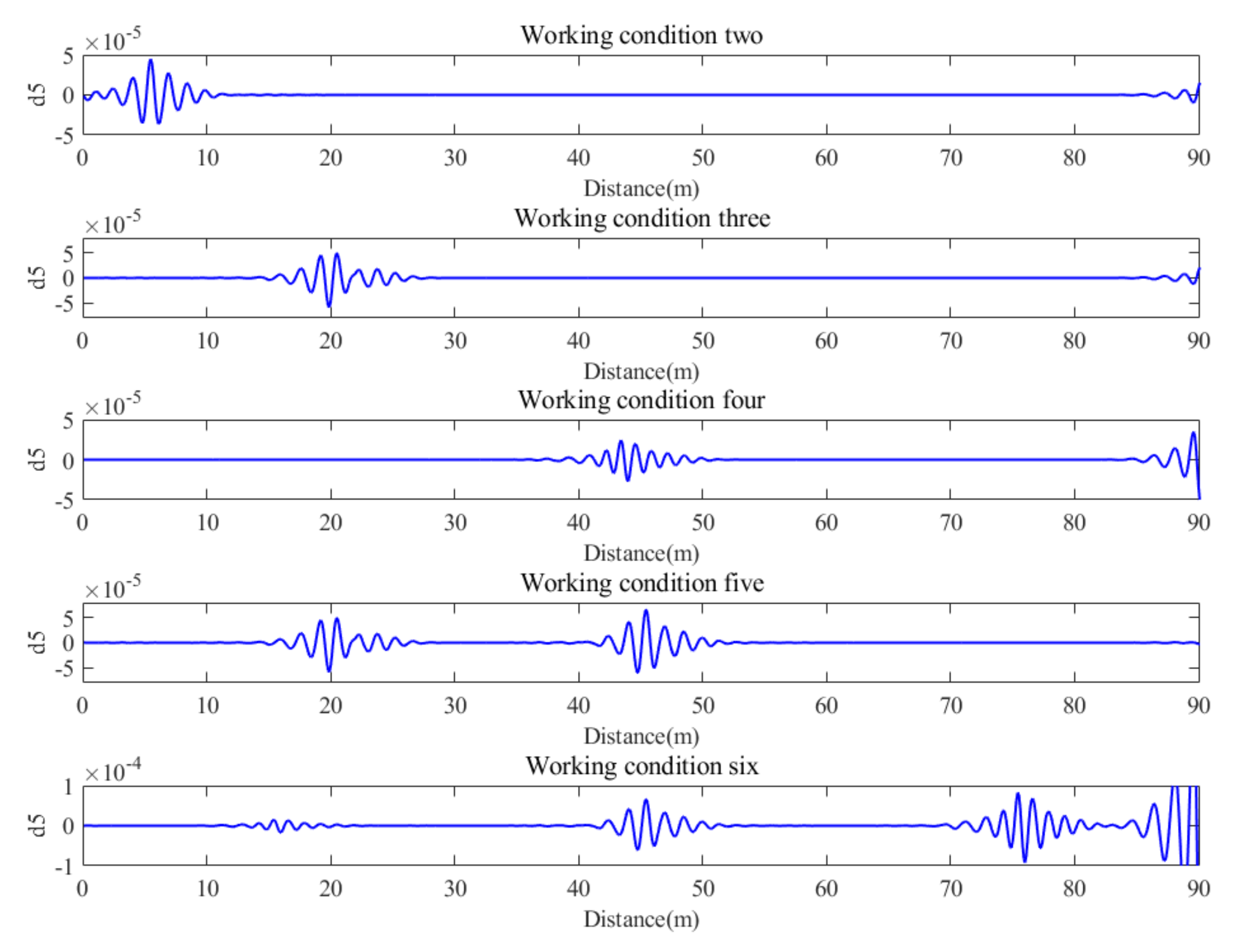
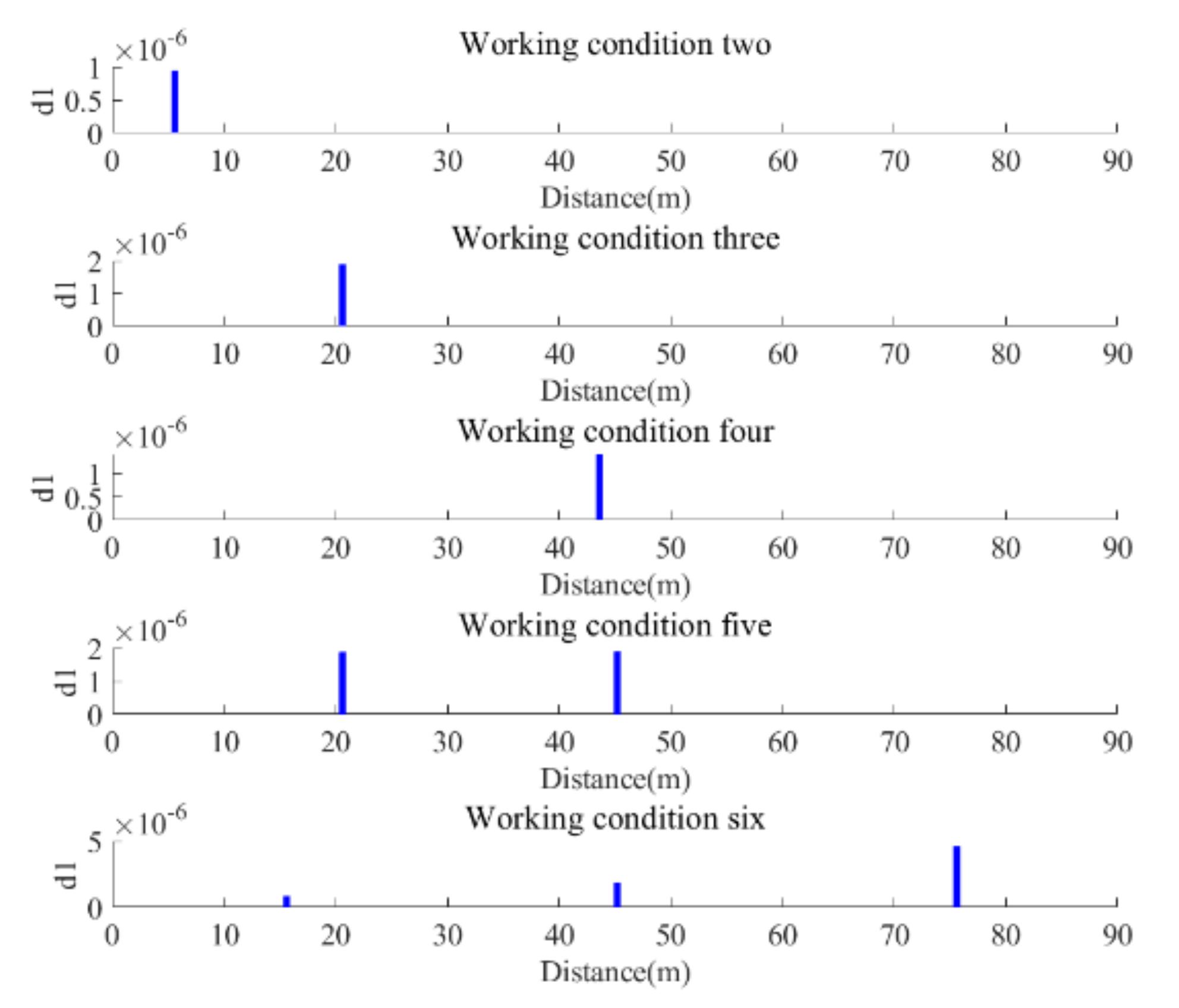
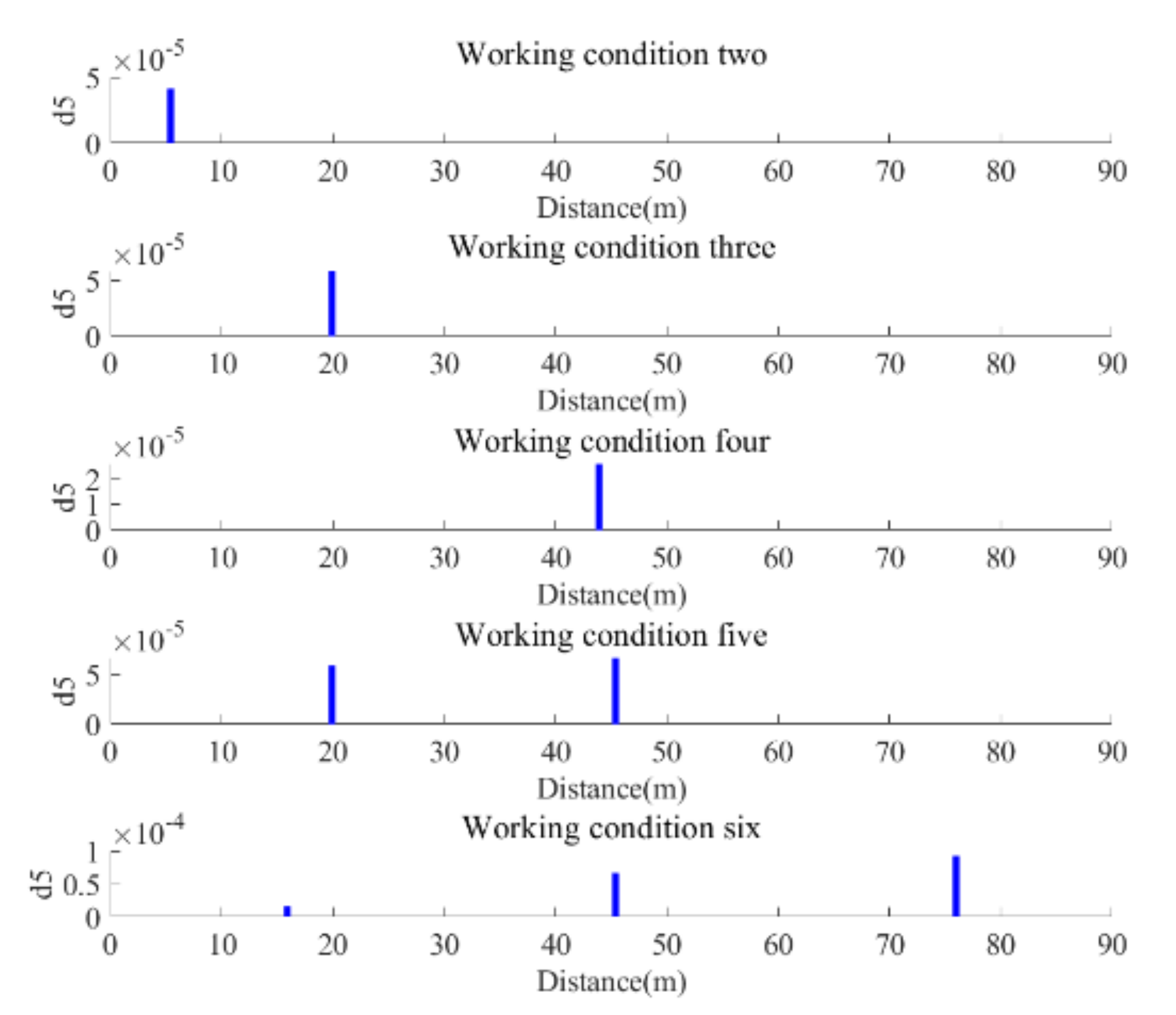
3.4. Identification of the Damage Location
4. Influence Factors on Damage Location Identification
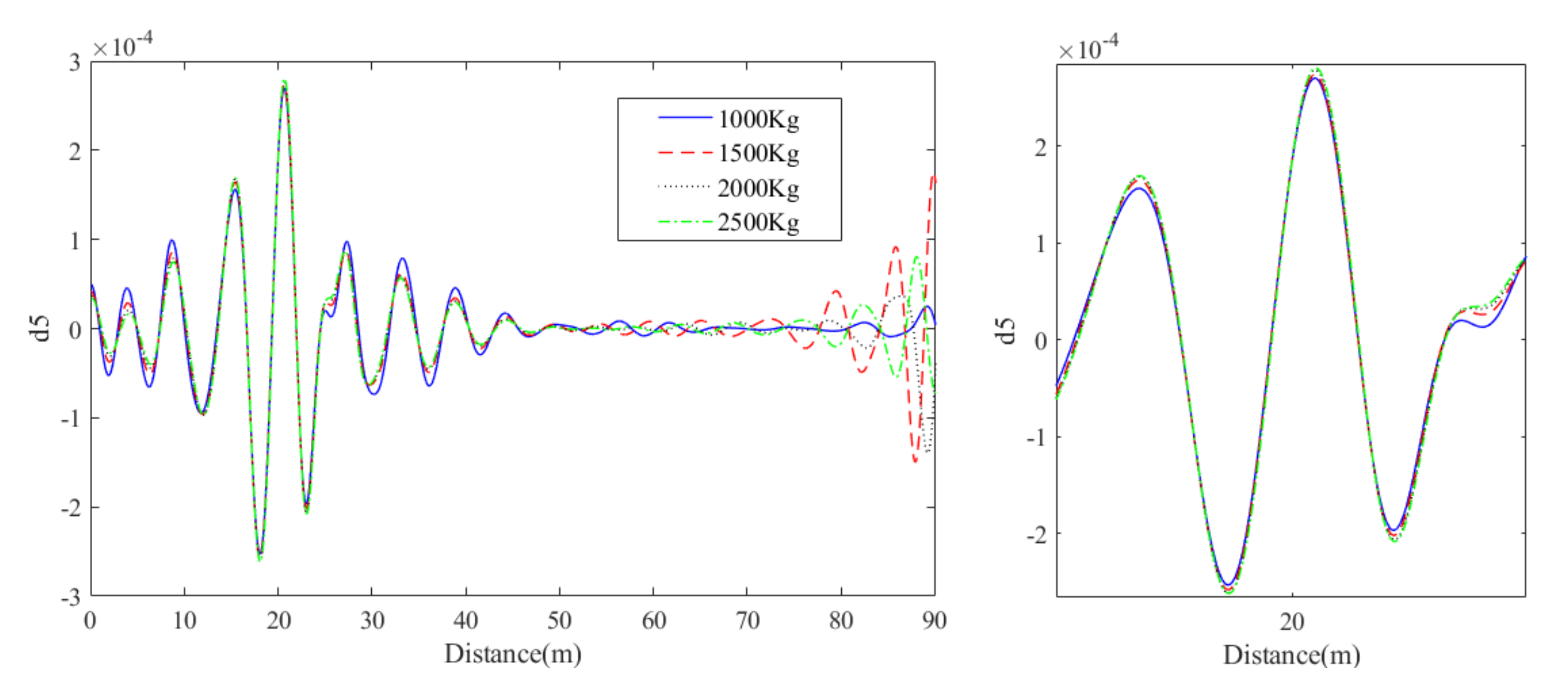
4.1. Influence of Vehicle Weight on Damage Location Identification
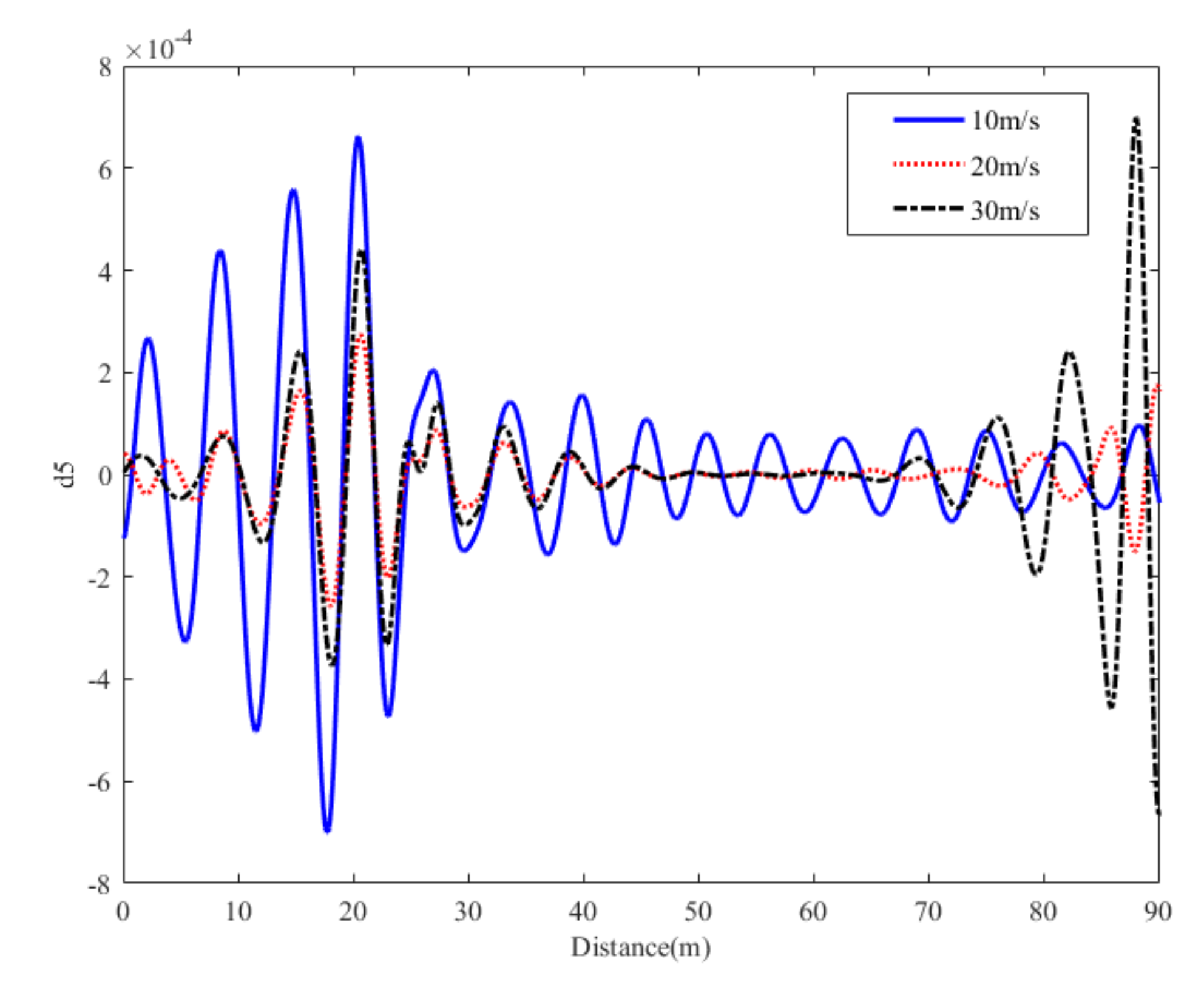
4.2. Influence of Vehicle Speed on Damage Location Identification
4.3. Influence of Road Surface Roughness on Damage Identification
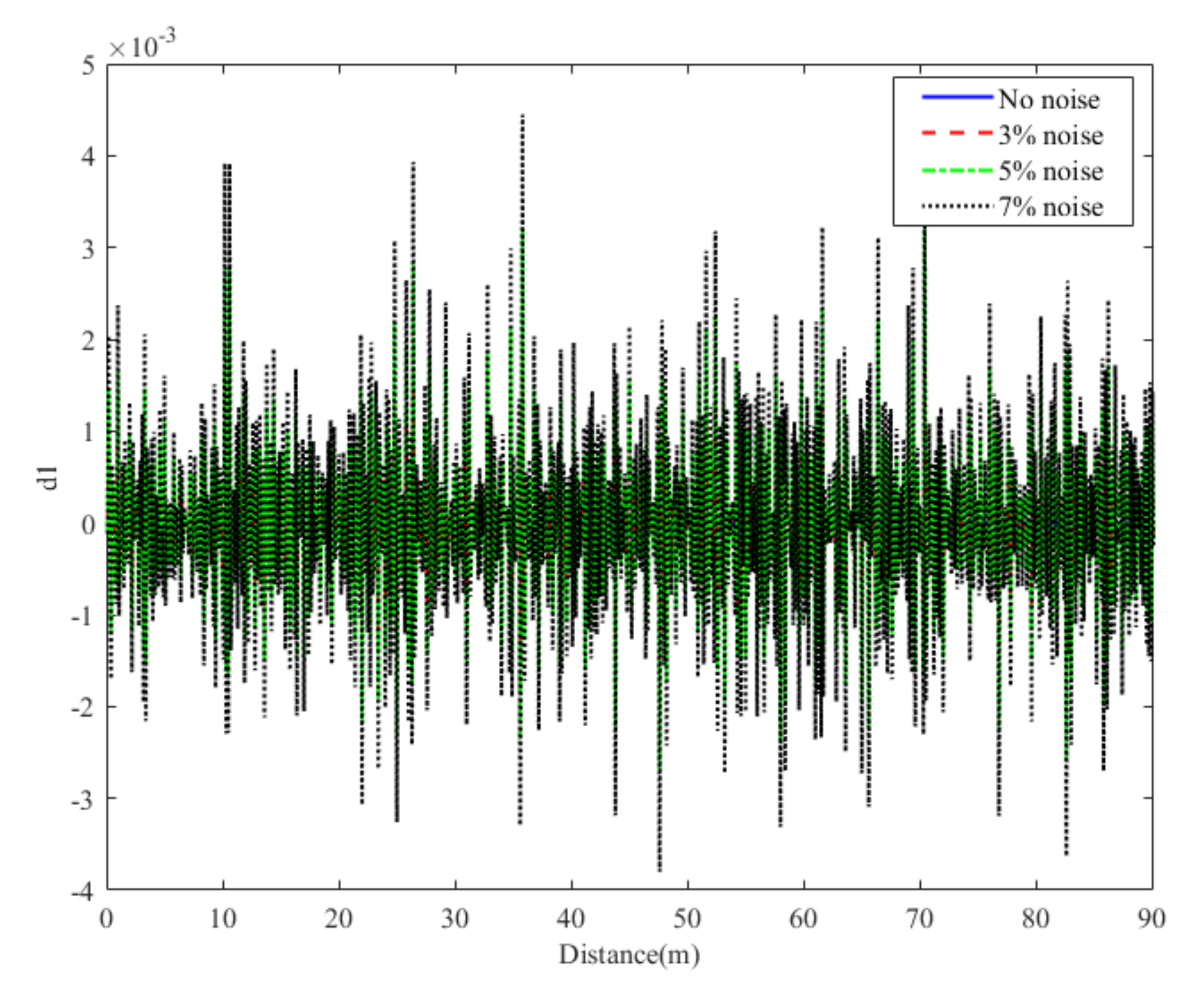
4.4. Influence of Noise on Damage Identification
5. Judgment of Damage Degree of Continuous Beam Bridge
5.1. Damage Index
5.2. Judgment of Bridge Damage Degree Based on Health Data
6. Conclusions
- (1)
- Using the maximum value successive approximation method to process the wavelet transform coefficient can accurately identify the damage location, and the identification accuracy is affected by vehicle speed, vehicle weight, road surface roughness, and noise. The recommended speed is 10 m/s, and the recommended vehicle weight is 1000 kg.
- (2)
- This damage detection method has good noise immunity. The vehicle response signal needs to be processed by wavelet noise reduction when the noise is greater. When the noise level is not higher than 5%, the location of the bridge damage can be identified successfully.
- (3)
- The corresponding damage degree index D and the damage degree function are put forward. According to this, the damage degree of the bridge can be judged, and the judgment error of the damage degree basically meets the requirements, which is suitable for continuous beam bridges with different span combinations.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, Q. Wuyishan Gongguan Bridge with a “Tragic Fate”. China Safety Production News N, 19 July 2011. [Google Scholar]
- Zadehmohamad, M.; Bazaz, J.B.; Riahipour, R.; Farhangi, V. Physical modeling of the long-term behavior of integral abutment bridge backfill reinforced with tire-rubber. Int. J. Geo-Eng. 2021, 12, 36. [Google Scholar] [CrossRef]
- Bandara, R.P.; Chan, T.; Thambiratnam, D. Structural damage detection method using frequency response functions. Struct. Health Monit. 2014, 13, 418–429. [Google Scholar] [CrossRef]
- Zhan, J.; Xia, H.; Zhang, N. Bridge damage identification method based on online vibration response. China Railw. Sci. 2011, 32, 58–62. [Google Scholar]
- Zhao, H. Performance Monitoring and Evaluation of Long-Span Cable-Stayed Bridges during Operation Period. Ph.D. Thesis, Southwest Jiaotong University, Chengdu, China, 2015. [Google Scholar]
- Yang, Y.-B.; Lin, C.; Yau, J. Extracting bridge frequencies from the dynamic response of a passing vehicle. J. Sound Vib. 2004, 272, 471–493. [Google Scholar] [CrossRef]
- Yang, Y.-B.; Lin, C. Vehicle–bridge interaction dynamics and potential applications. J. Sound Vib. 2005, 284, 205–226. [Google Scholar] [CrossRef]
- Bu, J.Q.; Law, S.S.; Zhu, X.Q. Innovative Bridge Condition Assessment from Dynamic Response of a Passing Vehicle. J. Eng. Mech. 2006, 132, 1372–1379. [Google Scholar] [CrossRef]
- Nguyen, K.V.; Tran, H.T. Multi-cracks detection of a beam-like structure based on the on-vehicle vibration signal and wavelet analysis. J. Sound Vib. 2010, 329, 4455–4465. [Google Scholar] [CrossRef]
- Sun, Z.; Zhang, Y.; Tong, S. Summary of Bridge Damage Detection Methods Based on Vehicle-Bridge Coupling Vibration. World Earthq. Eng. 2013, 29, 1–8. [Google Scholar]
- Yang, Y.-B.; Li, Y.; Chang, K. Constructing the mode shapes of a bridge from a passing vehicle: A theoretical study. Smart Struct. Syst. 2014, 13, 797–819. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Obrien, E. Identification of bridge mode shapes using Short Time Frequency Domain Decomposition of the responses measured in a passing vehicle. Eng. Struct. 2014, 81, 386–397. [Google Scholar] [CrossRef] [Green Version]
- Obrien, E.J.; Malekjafarian, A.; González, A. Application of empirical mode decomposition to drive-by bridge damage detection. Eur. J. Mech. A/Solids 2017, 61, 151–163. [Google Scholar] [CrossRef] [Green Version]
- Qian, Y. Bridge Frequency Identification and Damage Detection Based on Indirect Measurement Method. Master’s Thesis, Chongqing University, Chongqing, China, 2018. [Google Scholar]
- Marashi, S.M.; Pashaei, M.H.; Khatibi, M.M. Estimating the Mode Shapes of a Bridge Using Short Time Transmissibility Measurement from a Passing Vehicle. Appl. Comput. Mech. 2019, 5, 735–748. [Google Scholar]
- Locke, W.; Sybrand, J.; Redmond, L.; Safro, I.; Atamturktur, S. Using Drive-by health monitoring to detect bridge damage considering environmental and operational effects. J. Sound Vib. 2020, 468, 115088. [Google Scholar] [CrossRef]
- Clemente, P.; Bongiovanni, G.; Buffarini, G.; Saitta, F. Structural health status assessment of a cable-stayed bridge by means of experimental vibration analysi. J. Civ. Struct. Health Monit. 2019, 9, 655–669. [Google Scholar] [CrossRef]
- Farhangi, V.; Karakouzian, M. Design of Bridge Foundations Using Reinforced Micropiles. In Proceedings of the International Road Federation Global R2T Conference & Expo, Las Vegas, NV, USA, 19–22 November 2019. [Google Scholar]
- Zhao, L. Vehicle-Bridge Coupling Vibration Analysis of Long-span Highway Concrete Filled Steel Tube Arch Bridge. Master’s Thesis, Zhengzhou University, Zhengzhou, China, 2017. [Google Scholar]
- Lin, C.; Yang, Y.-B. Use of a passing vehicle to scan the fundamental bridge frequencies: An experimental verification. Eng. Struct. 2005, 27, 1865–1878. [Google Scholar] [CrossRef]
- Han, W.; Ma, L.; Yuan, S.; Zhao, S. Analysis of the influence of non-uniform excitation of road surface roughness on the response of vehicle-bridge coupled vibration system. China Civ. Eng. J. 2011, 44, 81–90. [Google Scholar]
- Guo, X.; Peng, M.; Zou, J.; Zhang, J.; Zhang, H. Research on Influencing Factors of Energy Feedback Potential of Commercial Vehicle Suspension. Chin. J. Highw. Transp. 2016, 29, 151–158. [Google Scholar]
- Yao, C. Analysis and Research on Road Vehicle-Bridge Coupling Vibration Considering the Influence of Bridge Surface Irregularities. Master’s Thesis, Central South University, Changsha, China, 2011. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Symbol | Unit | Value |
|---|---|---|---|
| Body mass | kg | 2000 | |
| Car suspension and wheel mass | (i = 1.2) | kg | 100 |
| Stiffness coefficient of vehicle suspension | (i = 1.2) | N/m | 4.07 × 105 |
| Vehicle suspension damping coefficient | (i = 1.2) | N·s/m | 7509 |
| Wheel stiffness coefficient | (i = 1.2) | N/m | 1.56 × 105 |
| Wheel damping coefficient | (i = 1.2) | N·s/m | 1000 |
| The lateral distance between the wheel and the center of mass of the car body | (i = 1.2) | m | 1 |
| Working Condition Description | Serial Number | Damage Distance (x/m) | Degree of Damage (θd/%) |
|---|---|---|---|
| No damage | Working condition 1 | \ | 0 |
| Single damage | Working condition 2 | 5 | 20 |
| Working condition 3 | 20 | 30 | |
| Working condition 4 | 45 | 20 | |
| Multiple damage | Working condition 5 | 20 | 30 |
| 45 | 20 | ||
| Working condition 6 | 15 | 10 | |
| 45 | 20 | ||
| 75 | 40 |
| Damage Conditions | Damage Position (x/m) | Degree of Damage (θd/%) | MSAA Coefficient | Damage Index D | Degree of Damage (Sd1(D)/%) | Judgment Error (Rd/%) |
|---|---|---|---|---|---|---|
| Working condition 2 | 5 | 20 | 9.44 × 10−7 | 4.57 × 10−4 | 18.17 | −1.83 |
| Working condition 3 | 20 | 30 | 1.89 × 10−6 | 9.06 × 10−4 | 29.95 | −0.05 |
| Working condition 4 | 43 | 20 | 1.42 × 10−6 | 4.86 × 10−4 | 19.08 | −0.92 |
| Working condition 5 | 20 | 30 | 1.80 × 10−6 | 9.08 × 10−4 | 29.99 | −0.01 |
| 45 | 20 | 1.89 × 10−6 | 4.90 × 10−4 | 19.21 | −0.79 | |
| Working condition 6 | 15 | 10 | 8.55 × 10−7 | 2.56 × 10−4 | 10.71 | 0.71 |
| 45 | 20 | 1.90 × 10−6 | 4.85 × 10−4 | 19.06 | −0.94 | |
| 75 | 40 | 4.64 × 10−6 | 1.43 × 10−3 | 40.07 | 0.07 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, K.; Qi, H.; Sun, Z. Damage Detection of Continuous Beam Bridge Based on Maximum Successful Approximation Approach of Wavelet Coefficients of Vehicle Response. Appl. Sci. 2022, 12, 3743. https://doi.org/10.3390/app12083743
Liu K, Qi H, Sun Z. Damage Detection of Continuous Beam Bridge Based on Maximum Successful Approximation Approach of Wavelet Coefficients of Vehicle Response. Applied Sciences. 2022; 12(8):3743. https://doi.org/10.3390/app12083743
Chicago/Turabian StyleLiu, Kai, Haopeng Qi, and Zengshou Sun. 2022. "Damage Detection of Continuous Beam Bridge Based on Maximum Successful Approximation Approach of Wavelet Coefficients of Vehicle Response" Applied Sciences 12, no. 8: 3743. https://doi.org/10.3390/app12083743