
Solving a Multi-Class Traffic Assignment Model with Mixed Modes



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Multi-Class Traffic Assignment
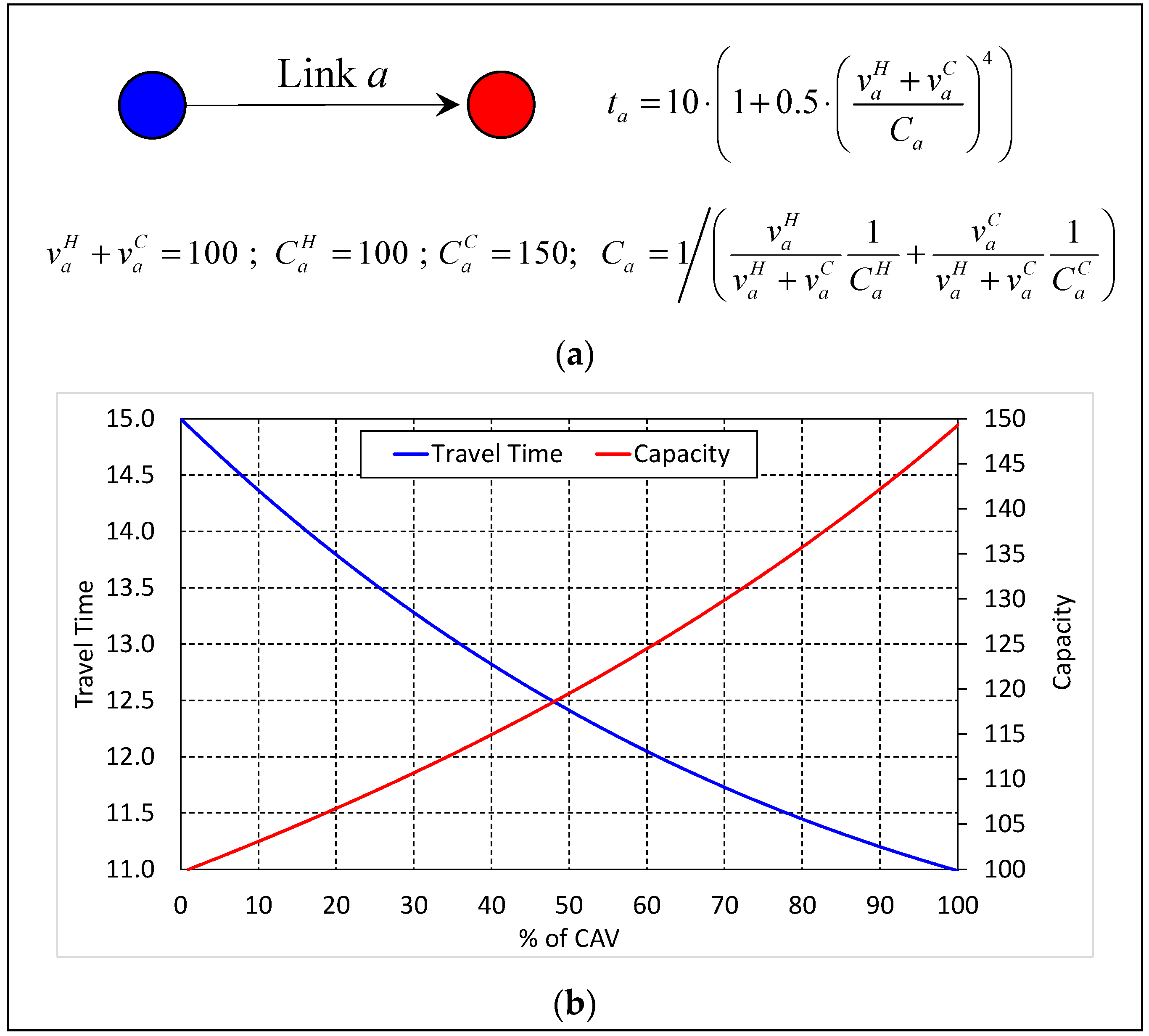
2.1. Travel Cost Function
| capacity (veh/hour) of link a. | |
| and | capacity of HV and CAV on link a, respectively. |
| headway (hour unit) of link a. | |
| and | headway (hour unit) of HV and CAV, respectively on link a. |
| and | link flows of HV and CAV, respectively on link a. |
| travel time on link a of class m. | |
| travel time weight parameter of class m. | |
| free-flow travel time of link a. | |
| flow on link a of class m. | |
| capacity on link a of class m. | |
| and | parameters of travel time function on link a. |
| cost of route k between origin r and destination s (O-D pair rs) in class m. | |
| travel time on route k and shortest route between O-D pair rs, respectively. | |
| route k flow between O-D pair rs. | |
| route-link indicator, 1 if link a is on route k between O-D pair rs and 0 otherwise. | |
| n | iteration number. |
| step size.u | |
| diagonal, positive definite scaling matrix on route k between O-D pair rs. |
2.2. Model Formulation
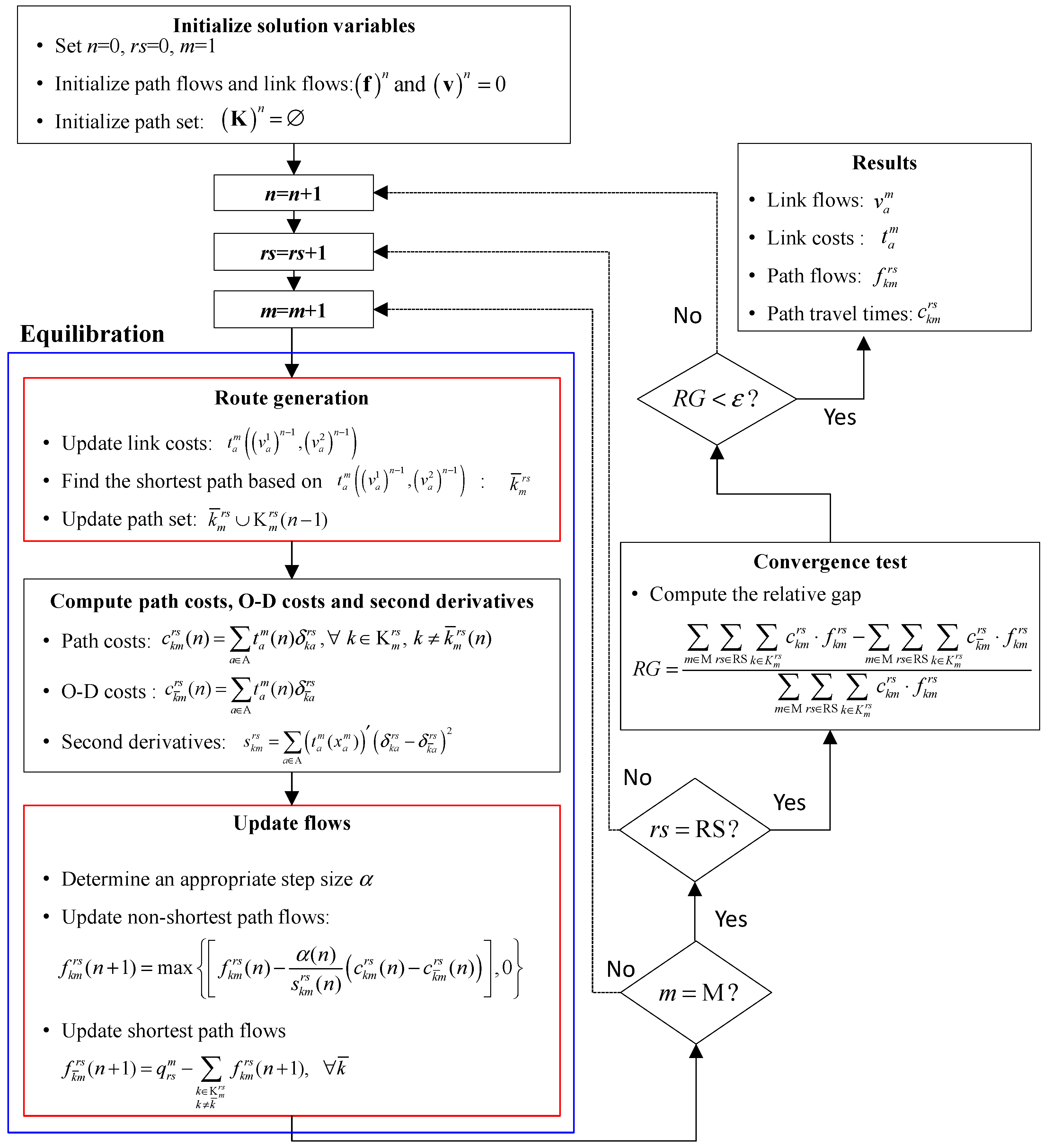
3. Solution Algorithms
4. Numerical Experiments
4.1. Small Network
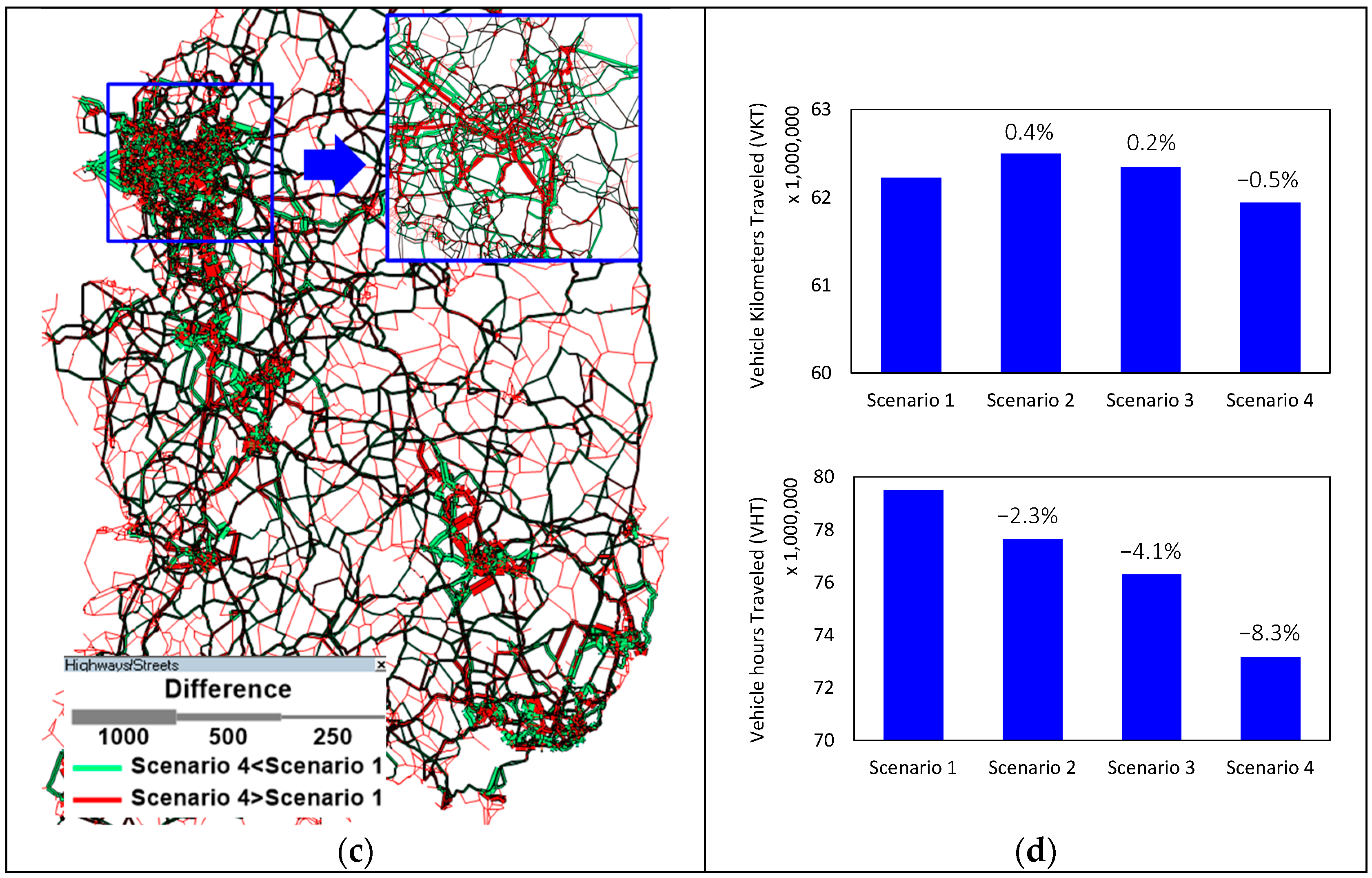
4.2. Korea Network
4.2.1. Convergence Characteristics
4.2.2. Assigned Flow Comparison
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Milakis, D. Long-term implications of automated vehicles: An introduction. Transp. Rev. 2019, 39, 1–8. [Google Scholar] [CrossRef]
- Severino, A.; Curto, S.; Barberi, S.; Arena, F.; Pau, G. Autonomous Vehicles: An Analysis Both on Their Distinctiveness and the Potential Impact on Urban Transport Systems. Appl. Sci. 2021, 11, 3604. [Google Scholar] [CrossRef]
- Razzaq, S.; Dar, A.R.; Shah, M.A.; Khattak, H.A.; Ahmed, E.; El-Sherbeeny, A.M.; Rauf, H.T. Multi-Factor Rear-End Collision Avoidance in Connected Autonomous Vehicles. Appl. Sci. 2022, 12, 1049. [Google Scholar] [CrossRef]
- Tientrakool, P.; Ho, Y.C.; Maxemchuk, N.F. Highway capacity benefits from using vehicle-to-vehicle communication and sensors for collision avoidance. In Proceedings of the 2011 IEEE Vehicular Technology Conference, San Francisco, CA, USA, 5–8 May 2011; pp. 1–5. [Google Scholar]
- Tran, Q.D.; Bae, S.H. An efficiency enhancing methodology for multiple autonomous vehicles in an Urban network adopting deep reinforcement learning. Appl. Sci. 2021, 11, 1514. [Google Scholar] [CrossRef]
- Gkartzonikas, C.; Gkritza, K. What have we learned? A review of stated preference and choice studies on autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2019, 98, 323–337. [Google Scholar] [CrossRef]
- Levin, M.W.; Boyles, S.D. A multiclass cell transmission model for shared human and autonomous vehicle roads. Transp. Res. Part C Emerg. Technol. 2016, 62, 103–116. [Google Scholar] [CrossRef] [Green Version]
- Xie, D.F.; Zhao, X.M.; He, Z. Heterogeneous traffic mixing regular and connected vehicles: Modeling and stabilization. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2060–2071. [Google Scholar] [CrossRef]
- Chen, Z.; He, F.; Yin, Y.; Du, Y. Optimal design of autonomous vehicle zones in transportation networks. Transp. Res. Part B Methodol. 2017, 99, 44–61. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; He, F.; Zhang, L.; Yin, Y. Optimal deployment of autonomous vehicle lanes with endogenous market penetration. Transp. Res. Part C Emerg. Technol. 2016, 72, 143–156. [Google Scholar] [CrossRef] [Green Version]
- Li, R.; Liu, X.; Nie, Y.M. Managing partially automated network traffic flow: Efficiency vs. stability. Transp. Res. Part B Methodol. 2018, 114, 300–324. [Google Scholar] [CrossRef]
- Zhang, K.; Nie, Y.M. Mitigating the impact of selfish routing: An optimal-ratio control scheme (ORCS) inspired by autonomous driving. Transp. Res. Part C Emerg. Technol. 2018, 87, 75–90. [Google Scholar] [CrossRef]
- Chen, A.; Lee, D.H.; Jayakrishnan, R. Computational study of state-of-the-art path-based traffic assignment algorithms. Math. Comput. Simul. 2002, 59, 509–518. [Google Scholar] [CrossRef]
- Jayakrishnan, R.; Tsai, W.T.; Prashker, J.N.; Rajadhyaksha, S. A faster path-based algorithm for traffic assignment. Transp. Res. Rec. 1994, 1443, 75–83. [Google Scholar]
- Tan, H.; Du, M.; Chen, A. Accelerating the gradient projection algorithm for solving the non-additive traffic equilibrium problem with the Barzilai-Borwein step size. Comput. Oper. Res. 2022, 141, 105723. [Google Scholar] [CrossRef]
- Tan, H.; Yu, C.B.; Du, M. A multiple-path gradient projection method for solving the logit-based stochastic user equilibrium model. J. Transp. Land Use 2020, 13, 539–558. [Google Scholar] [CrossRef]
- Chen, A.; Zhou, Z.; Xu, X. A self-adaptive gradient projection algorithm for the nonadditive traffic equilibrium problem. Comput. Oper. Res. 2012, 39, 127–138. [Google Scholar] [CrossRef]
- Zhou, Z.; Chen, A.; Bekhor, S. C-logit stochastic user equilibrium model: Formulations and solution algorithm. Transp. A Transp. Sci. 2012, 8, 17–41. [Google Scholar] [CrossRef]
- Chen, A.; Xu, X.; Ryu, S.; Zhou, Z. A self-adaptive Armijo stepsize strategy with application to traffic assignment models and algorithms. Transp. A Transp. Sci. 2013, 9, 695–712. [Google Scholar] [CrossRef]
- Ryu, S.; Chen, A.; Choi, K. A modified gradient projection algorithm for solving the elastic demand traffic assignment problem. Comput. Oper. Res. 2014, 47, 61–71. [Google Scholar] [CrossRef]
- Wardrop, J.G. Road paper. some theoretical aspects of road traffic research. Proc. Inst. Civ. Eng. 1952, 1, 325–362. [Google Scholar] [CrossRef]
- Facchinei, F.; Pang, J.S. (Eds.) Finite-Dimensional Variational Inequalities and Complementarity Problems; Springer: New York, NY, USA, 2003. [Google Scholar]
- Bertsekas, D.; Gafni, E.; Gallager, R. Second derivative algorithms for mini- mum delay distributed routing in network. IEEE Trans. Commun. 1984, 32, 911–919. [Google Scholar] [CrossRef] [Green Version]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ryu, S.; Kim, M. Solving a Multi-Class Traffic Assignment Model with Mixed Modes. Appl. Sci. 2022, 12, 3678. https://doi.org/10.3390/app12073678
Ryu S, Kim M. Solving a Multi-Class Traffic Assignment Model with Mixed Modes. Applied Sciences. 2022; 12(7):3678. https://doi.org/10.3390/app12073678
Chicago/Turabian StyleRyu, Seungkyu, and Minki Kim. 2022. "Solving a Multi-Class Traffic Assignment Model with Mixed Modes" Applied Sciences 12, no. 7: 3678. https://doi.org/10.3390/app12073678