
Enhanced Multi-Strategy Particle Swarm Optimization for Constrained Problems with an Evolutionary-Strategies-Based Unfeasible Local Search Operator



Abstract
:1. Introduction
- PSO implementation with the main state-of-art improvements, adopting a multi-strategy approach. In this way, the algorithm attempts to avoid wasting many iterations when the algorithm stalls or is trapped in local minima, etc.;
- A non-penalty approach for constraint handling which instead exploits information of swarm positions in terms of the objective function and the actual degree of constraint violation to guide the swarm evolution;
- A novel unfeasible local search operator is presented to help the PSO when it stalls in an unfeasible region quite close to the actual feasible one. This local search operator relies on the meta-heuristic, self-adaptive Evolutionary Strategy (ES) approach, which does not require any other further arbitrary parameter.
2. Review of PSO and Constraint Handling Approaches
State of the Art of Constraint Handling
- Penalty-functions-based methods;
- Methods based on special operators and representations;
- Methods based on repair algorithms;
- Methods based on the separation between OFs and constraints;
- Hybrid methods.
3. Enhanced PSO with a Multi-Strategy Implementation and Hybridisation with an ES-Based Operator
4. Numerical Test and Comparisons
5. Structural Optimization on Literature Benchmarks
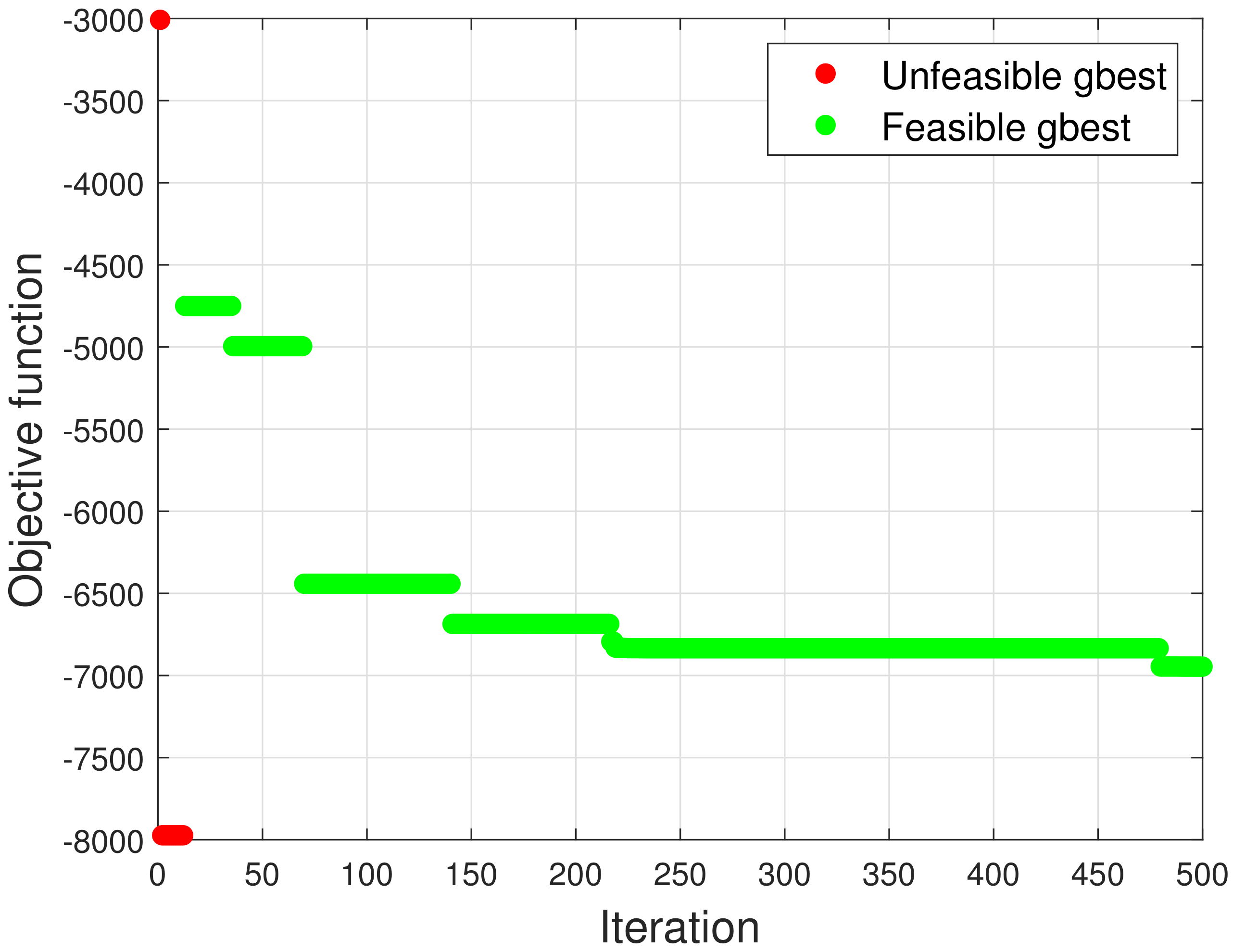
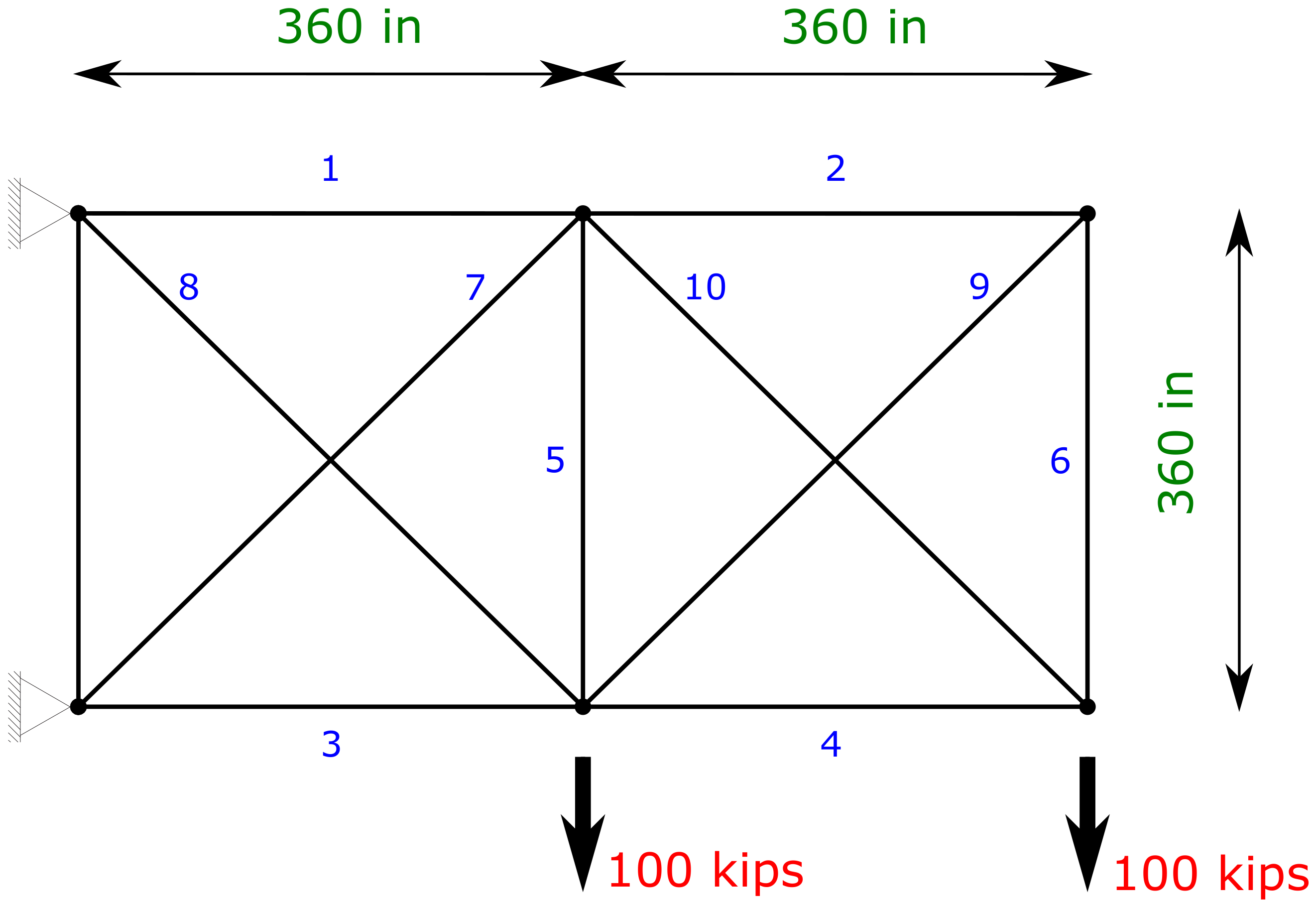
5.1. Ten-Bar Truss Design Optimization
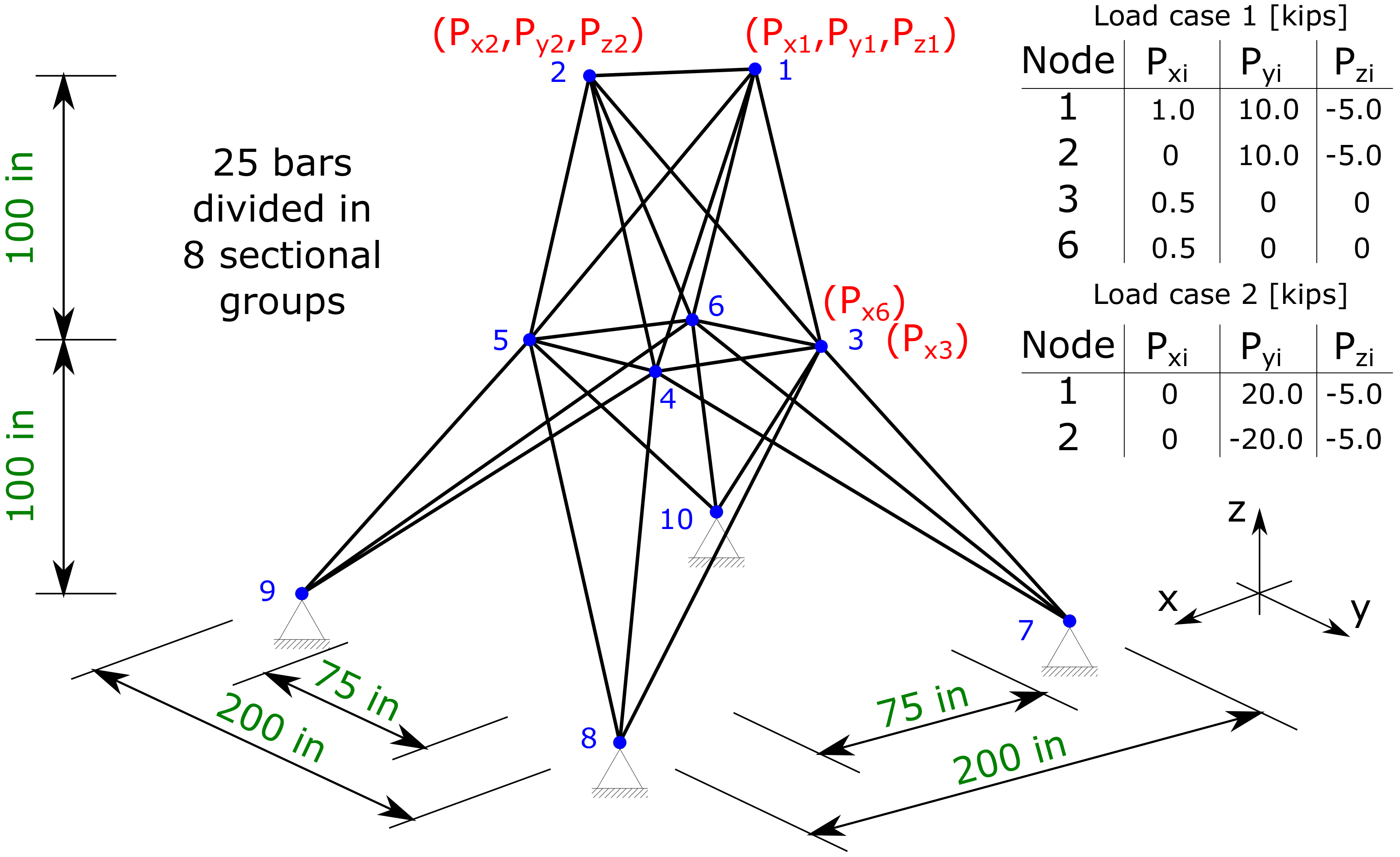
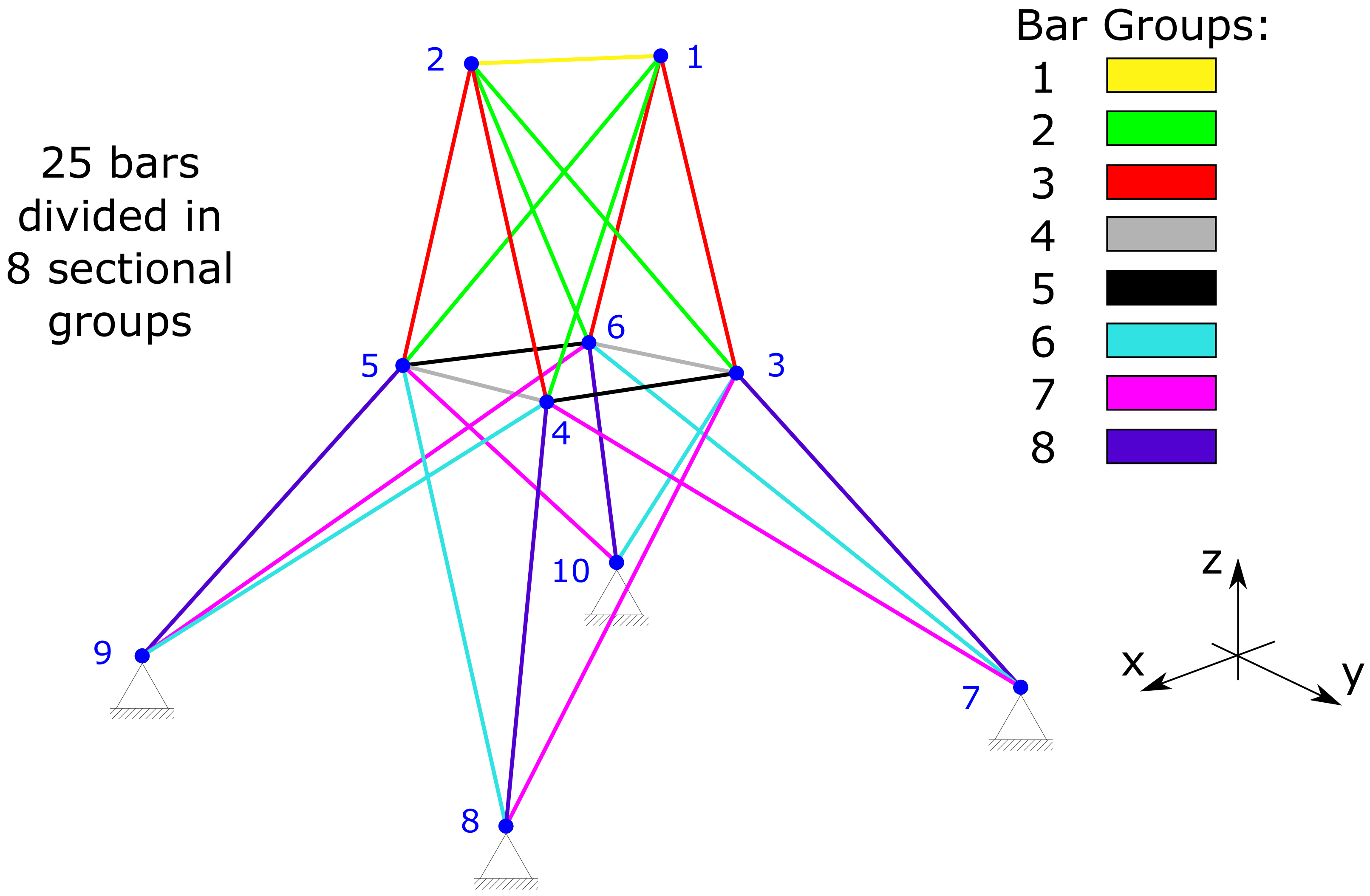
5.2. Twenty-Five-Bar Truss Design Optimization with Multi-Load Cases Conditions
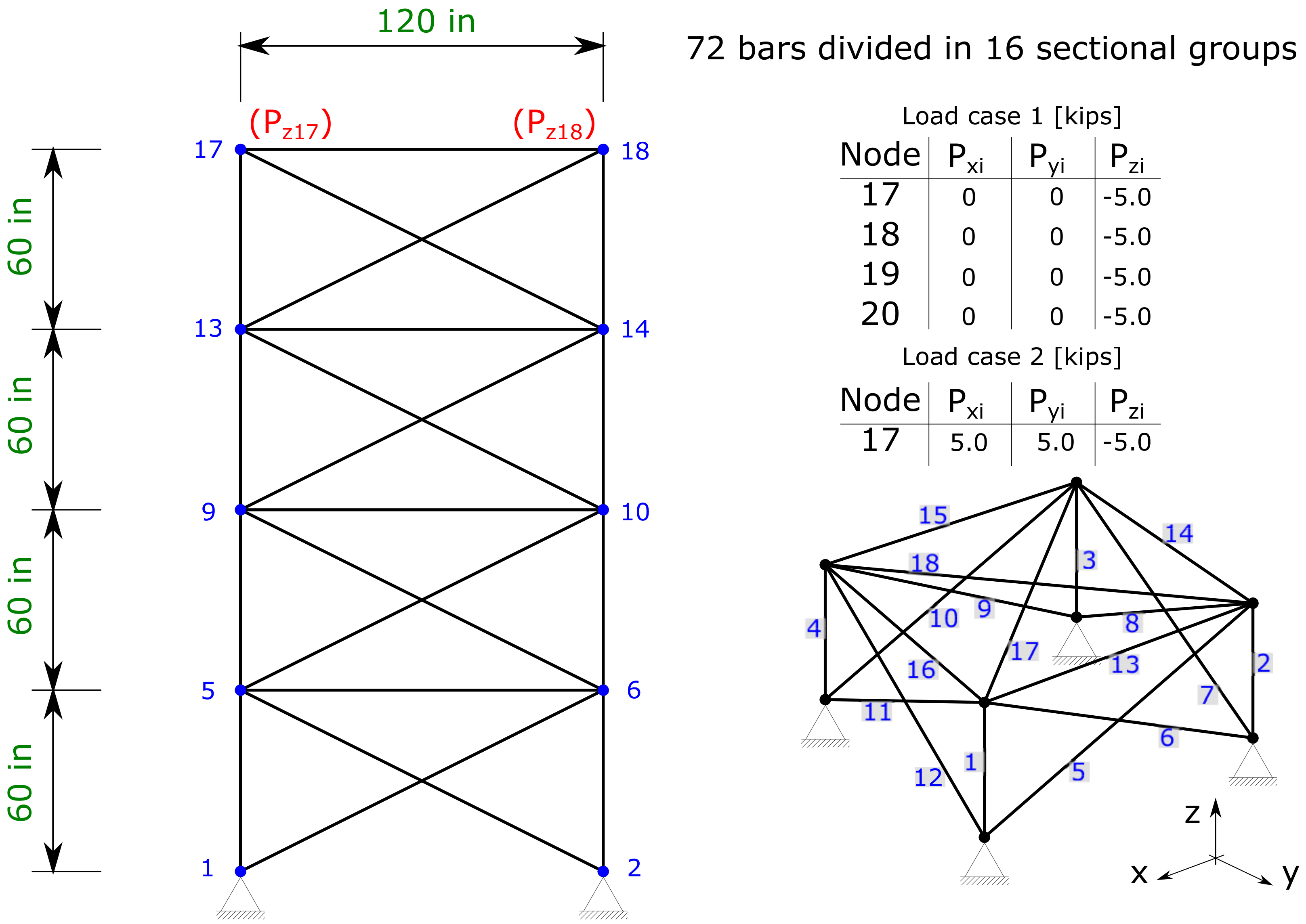
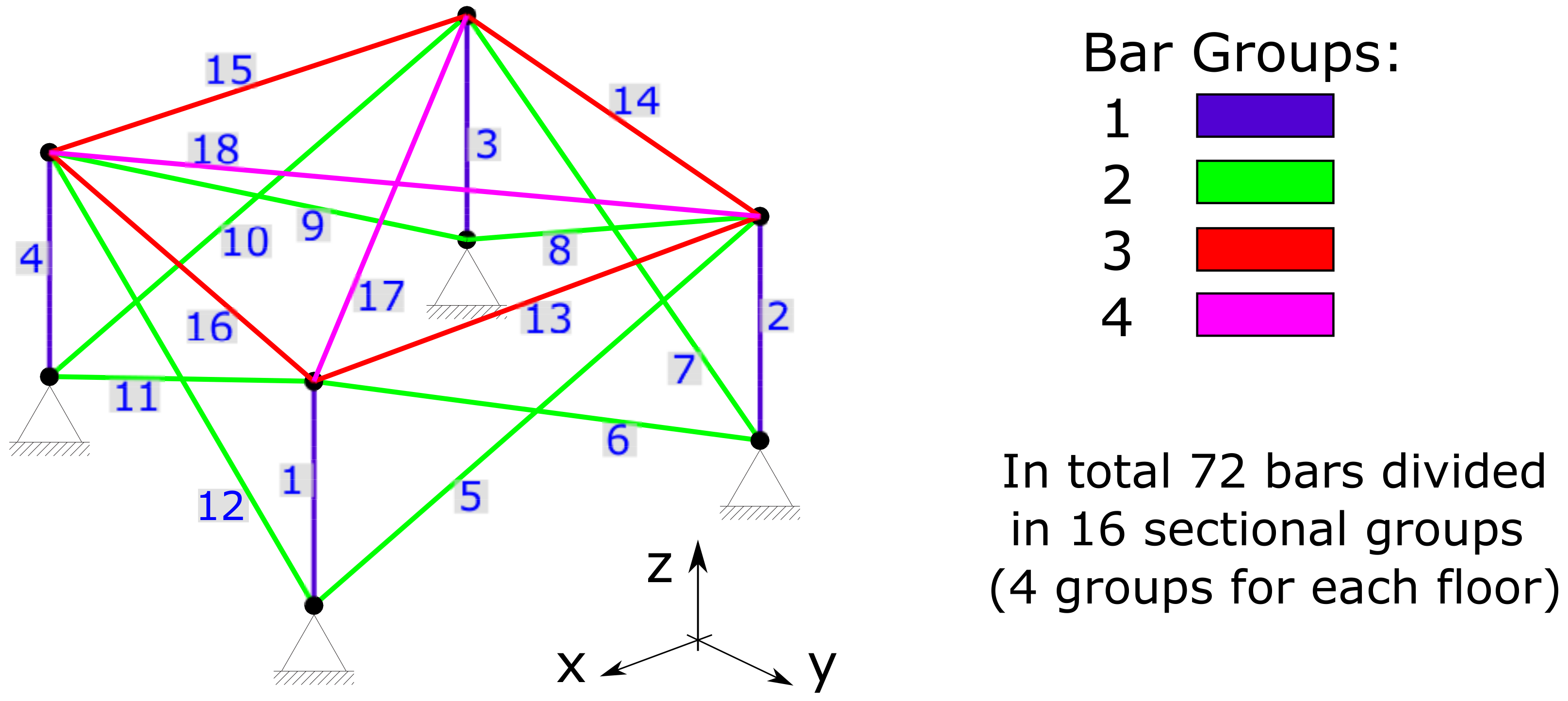
5.3. Seventy-Two-Bar Truss Design Optimization with Multi-Load Cases Conditions
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Test Functions Constrained Problems
- Problem g01Minimize:Subject to:where the search space is defined as (), (), . The optimum is located at , where .
- Problem g02Maximize:Subject to:where and the search space is defined as (). The optimum OF is .
- Problem g04Minimize:Subject to:where the search space is defined as and and . The optimum is located at , where .
- Problem g06Minimize:Subject to:where the search space is defined as and . The optimum is located at , where .
- Problem g07Minimize:Subject to:where the search space is defined as (). The optimum OF is .
- Problem g08Maximize:Subject to:where the search space is defined as . The optimum is located at , where .
- Problem g09Minimize:Subject to:where the search space is defined as (). The optimum OF is .
- Problem g12Maximize:Subject to:where the search space is defined as () and . The optimum OF is .
References
- Martí, R.; Pardalos, P.M.; Resende, M.G.C. Handbook of Heuristics, 1st ed.; Springer Publishing Company, Incorporated: Berlin/Heidelberg, Germany, 2018. [Google Scholar] [CrossRef]
- Lagaros, N.D.; Papadrakakis, M.; Kokossalakis, G. Structural optimization using evolutionary algorithms. Comput. Struct. 2002, 80, 571–589. [Google Scholar] [CrossRef] [Green Version]
- Marano, G.; Trentadue, F.; Greco, R. Stochastic optimum design criterion of added viscous dampers for buildings seismic protection. Struct. Eng. Mech. 2007, 25, 21–37. [Google Scholar] [CrossRef]
- Pelliciari, M.; Marano, G.; Cuoghi, T.; Briseghella, B.; Lavorato, D.; Tarantino, A. Parameter identification of degrading and pinched hysteretic systems using a modified Bouc–Wen model. Struct. Infrastruct. Eng. 2018, 14, 1573–1585. [Google Scholar] [CrossRef]
- Xue, J.; Lavorato, D.; Bergami, A.; Nuti, C.; Briseghella, B.; Marano, G.; Ji, T.; Vanzi, I.; Tarantino, A.; Santini, S. Severely damaged reinforced concrete circular columns repaired by turned steel rebar and high-performance concrete jacketing with steel or polymer fibers. Appl. Sci. 2018, 8, 1671. [Google Scholar] [CrossRef] [Green Version]
- Greco, R.; Marano, G. Identification of parameters of Maxwell and Kelvin-Voigt generalized models for fluid viscous dampers. JVC/J. Vib. Control 2015, 21, 260–274. [Google Scholar] [CrossRef]
- Di Trapani, F.; Tomaselli, G.; Sberna, A.P.; Rosso, M.M.; Marano, G.C.; Cavaleri, L.; Bertagnoli, G. Dynamic Response of Infilled Frames Subject to Accidental Column Losses. In Proceedings of the 1st Conference of the European Association on Quality Control of Bridges and Structures, Padua, Italy, 29 August–1 September 2021; Pellegrino, C., Faleschini, F., Zanini, M.A., Matos, J.C., Casas, J.R., Strauss, A., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 1100–1107. [Google Scholar]
- Asso, R.; Cucuzza, R.; Rosso, M.M.; Masera, D.; Marano, G.C. Bridges Monitoring: An Application of AI with Gaussian Processes. In Proceedings of the 14th International Conference on Evolutionary and Deterministic Methods for Design, Optimization and Control, Athens, Greece, 28–30 June 2021; Institute of Structural Analysis and Antiseismic Research National Technical University of Athens: Athens, Greece, 2021. [Google Scholar] [CrossRef]
- De Domenico, D.; Qiao, H.; Wang, Q.; Zhu, Z.; Marano, G. Optimal design and seismic performance of Multi-Tuned Mass Damper Inerter (MTMDI) applied to adjacent high-rise buildings. Struct. Des. Tall Spec. Build. 2020, 29, e1781. [Google Scholar] [CrossRef]
- De Tommasi, D.; Marano, G.; Puglisi, G.; Trentadue, F. Morphological optimization of tensegrity-type metamaterials. Compos. Part B Eng. 2017, 115, 182–187. [Google Scholar] [CrossRef]
- Sardone, L.; Rosso, M.M.; Cucuzza, R.; Greco, R.; Marano, G.C. Computational Design of Comparative Models and Geometrically Constrained Optimization of A Multi Domain Variable Section Beam Based on Timoshenko Model. In Proceedings of the 14th International Conference on Evolutionary and Deterministic Methods for Design, Optimization and Control, Athens, Greece, 28–30 June 2021; Institute of Structural Analysis and Antiseismic Research National Technical University of Athens: Athens, Greece, 2021. [Google Scholar] [CrossRef]
- Cucuzza, R.; Rosso, M.M.; Marano, G. Optimal preliminary design of variable section beams criterion. SN Appl. Sci. 2021, 3, 745. [Google Scholar] [CrossRef]
- Cucuzza, R.; Costi, C.; Rosso, M.M.; Domaneschi, M.; Marano, G.C.; Masera, D. Optimal strengthening by steel truss arches in prestressed girder bridges. In Proceedings of the Institution of Civil Engineers—Bridge Engineering; Thomas Telford Ltd.: London, UK, 2021; pp. 1–21. [Google Scholar] [CrossRef]
- Fiore, A.; Marano, G.; Greco, R.; Mastromarino, E. Structural optimization of hollow-section steel trusses by differential evolution algorithm. Int. J. Steel Struct. 2016, 16, 411–423. [Google Scholar] [CrossRef]
- Aloisio, A.; Pasca, D.P.; Battista, L.; Rosso, M.M.; Cucuzza, R.; Marano, G.; Alaggio, R. Indirect assessment of concrete resistance from FE model updating and Young’s modulus estimation of a multi-span PSC viaduct: Experimental tests and validation. Elsevier Struct. 2022, 37, 686–697. [Google Scholar] [CrossRef]
- Marano, G.; Trentadue, F.; Petrone, F. Optimal arch shape solution under static vertical loads. Acta Mech. 2014, 225, 679–686. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]
- Rosso, M.M.; Cucuzza, R.; Di Trapani, F.; Marano, G.C. Nonpenalty Machine Learning Constraint Handling Using PSO-SVM for Structural Optimization. Adv. Civ. Eng. 2021, 2021, 6617750. [Google Scholar] [CrossRef]
- Plevris, V. Innovative Computational Techniques for the Optimum Structural Design Considering Uncertainties. Ph.D. Thesis, Institute of Structural Analysis and Seismic Research, School of Civil Engineering, National Technical University of Athens (NTUA), Athens, Greece, 2009. [Google Scholar] [CrossRef]
- Sengupta, S.; Basak, S.; Peters, R.A. Particle Swarm Optimization: A Survey of Historical and Recent Developments with Hybridization Perspectives. Mach. Learn. Knowl. Extr. 2019, 1, 157–191. [Google Scholar] [CrossRef] [Green Version]
- Quaranta, G.; Lacarbonara, W.; Masri, S. A review on computational intelligence for identification of nonlinear dynamical systems. Nonlinear Dyn. 2020, 99, 1709–1761. [Google Scholar] [CrossRef]
- Li, B.; Xiao, R. The Particle Swarm Optimization Algorithm: How to Select the Number of Iteration. In Proceedings of the Third International Conference on Intelligent Information Hiding and Multimedia Signal Processing (IIH-MSP 2007), Kaohsiung, Taiwan, 26–28 November 2007; pp. 191–196. [Google Scholar] [CrossRef]
- Shi, Y.; Obaiahnahatti, B. A Modified Particle Swarm Optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation, IEEE World Congress on Computational Intelligence (Cat. No. 98TH8360), Anchorage, AK, USA, 4–9 May 1998; Volume 6, pp. 69–73. [Google Scholar] [CrossRef]
- Perez, R.; Behdinan, K. Particle swarm approach for structural design optimization. Comput. Struct. 2007, 85, 1579–1588. [Google Scholar] [CrossRef]
- Medina, A.; Toscano Pulido, G.; Ramírez-Torres, J. A Comparative Study of Neighborhood Topologies for Particle Swarm Optimizers; IJCCI: Pasadena, CA, USA, 2009; pp. 152–159. [Google Scholar]
- Schmitt, B.I. Convergence Analysis for Particle Swarm Optimization. Ph.D. Thesis, FAU University Press, Erlangen, Nürnberg, Germany, 2015. [Google Scholar]
- Liang, J.; Suganthan, P. Dynamic Multi-Swarm Particle Swarm Optimizer with a Novel Constraint-Handling Mechanism. In Proceedings of the 2006 IEEE International Conference on Evolutionary Computation, Vancouver, BC, Canada, 16–21 July 2006; pp. 9–16. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R.C. Swarm Intelligence; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 2001. [Google Scholar]
- Deb, K. An efficient constraint handling method for genetic algorithms. Comput. Method Appl. Mech. Eng. 2000, 186, 311–338. [Google Scholar] [CrossRef]
- Coello Coello, C.A. Theoretical and numerical constraint-handling techniques used with evolutionary algorithms: A survey of the state of the art. Comput. Methods Appl. Mech. Eng. 2002, 191, 1245–1287. [Google Scholar] [CrossRef]
- Wang, Y.; Cai, Z.; Zhou, Y.; Fan, Z. Constrained optimization based on hybrid evolutionary algorithm and adaptive constraint-handling technique. Struct. Multidiscip. Optim. 2008, 37, 395–413. [Google Scholar] [CrossRef]
- Mezura-Montes, E. Constraint-Handling in Evolutionary Optimization; Springer: Berlin/Heidelberg, Germany, 2009; Volume 198. [Google Scholar] [CrossRef]
- Koziel, S.; Michalewicz, Z. Evolutionary Algorithms, Homomorphous Mappings, and Constrained Parameter Optimization. Evol. Comput. 1999, 7, 19–44. [Google Scholar] [CrossRef]
- Michalewicz, Z.; Fogel, D. How to Solve It: Modern Heuristics; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar] [CrossRef]
- Rezaee Jordehi, A. A review on constraint handling strategies in particle swarm optimisation. Neural Comput. Appl. 2015, 26, 1265–1275. [Google Scholar] [CrossRef]
- Kohler, M.; Vellasco, M.M.; Tanscheit, R. PSO+: A new particle swarm optimization algorithm for constrained problems. Appl. Soft Comput. 2019, 85, 105865. [Google Scholar] [CrossRef]
- Mezura-Montes, E.; Coello, C. A simple multimembered evolution strategy to solve constrained optimization problems. IEEE Trans. Evol. Comput. 2005, 9, 1–17. [Google Scholar] [CrossRef]
- Hasançebi, O.; Çarbaş, S.; Doğan, E.; Erdal, F.; Saka, M. Performance evaluation of metaheuristic search techniques in the optimum design of real size pin jointed structures. Comput. Struct. 2009, 87, 284–302. [Google Scholar] [CrossRef]
- Dimopoulos, G.G. Mixed-variable engineering optimization based on evolutionary and social metaphors. Comput. Methods Appl. Mech. Eng. 2007, 196, 803–817. [Google Scholar] [CrossRef]
- Parsopoulos, K.; Vrahatis, M. Unified Particle Swarm Optimization for Solving Constrained Engineering Optimization Problems. In International Conference on Natural Computation; Springer: Berlin/Heidelberg, Germany, 2005; Volume 3612, pp. 582–591. [Google Scholar] [CrossRef] [Green Version]
- Coello, C. Self-adaptive penalties for GA-based optimization. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99 (Cat. No. 99TH8406), Washington, DC, USA, 6–9 July 1999; Volume 1, pp. 573–580. [Google Scholar] [CrossRef]
- Parsopoulos, K.; Vrahatis, M. Particle Swarm Optimization Method for Constrained Optimization Problem. Intell. Technol. Theory Appl. New Trends Intell. Technol. 2002, 76, 214–220. [Google Scholar]
- Barakat, S.A.; Altoubat, S. Application of evolutionary global optimization techniques in the design of RC water tanks. Eng. Struct. 2009, 31, 332–344. [Google Scholar] [CrossRef]
- Monti, G.; Quaranta, G.; Marano, G. Genetic-Algorithm-Based Strategies for Dynamic Identification of Nonlinear Systems with Noise-Corrupted Response. J. Comput. Civ. Eng. 2010, 24, 173–187. [Google Scholar] [CrossRef]
- Beyer, H.G.; Schwefel, H.P. Evolution strategies—A comprehensive introduction. Nat. Comput. 2002, 1, 3–52. [Google Scholar] [CrossRef]
- Eiben, A.; Smith, J. Introduction To Evolutionary Computing; Springer: Berlin/Heidelberg, Germany, 2003; Volume 45. [Google Scholar] [CrossRef]
- Beyer, H.G. Toward a Theory of Evolution Strategies: Self-Adaptation. Evol. Comput. 1995, 3, 311–347. [Google Scholar] [CrossRef]
- Fister, I., Jr.; Fister, I. On the Mutation Operators in Evolution Strategies; Springer: Cham, Switzerland, 2015; Volume 18, pp. 69–89. [Google Scholar] [CrossRef]
- Hansen, N. An analysis of mutative σ-self-adaptation on linear fitness functions. Evol. Comput. 2006, 14, 255–275. [Google Scholar] [CrossRef]
- Miranda, V.; Fonseca, N. EPSO-evolutionary particle swarm optimization, a new algorithm with applications in power systems. In Proceedings of the IEEE/PES Transmission and Distribution Conference and Exhibition, Yokohama, Japan, 6–10 October 2002; Volume 2, pp. 745–750. [Google Scholar]
- Kramer, O. Evolutionary self-adaptation: A survey of operators and strategy parameters. Evol. Intell. 2010, 3, 51–65. [Google Scholar] [CrossRef]
- Simionescu, P.A.; Beale, D.; Dozier, G.V. Constrained optimization problem solving using estimation of distribution algorithms. In Proceedings of the 2004 Congress on Evolutionary Computation (IEEE Cat. No. 04TH8753), Portland, OR, USA, 19–23 June 2004; Volume 1, pp. 296–302. [Google Scholar]
- Long, W.; Liang, X.; Huang, Y.; Chen, Y. A hybrid differential evolution augmented Lagrangian method for constrained numerical and engineering optimization. Comput.-Aided Des. 2013, 45, 1562–1574. [Google Scholar] [CrossRef] [Green Version]
- Alam, M. Codes in MATLAB for Particle Swarm Optimization; Research Gate Indian, Institute of Technology Roorkee: Roorkee, India, 2016. [Google Scholar] [CrossRef]
- Christensen, P.; Klarbring, A. An Introduction to Structural Optimization; Springer: Berlin/Heidelberg, Germany, 2008; Volume 153. [Google Scholar] [CrossRef]
- Camp, C.; Farshchin, M. Design of space trusses using modified teaching–learning based optimization. Eng. Struct. 2014, 62–63, 87–97. [Google Scholar] [CrossRef]
- Pelikan, M.; Hauschild, M.W.; Lobo, F.G. Estimation of Distribution Algorithms; Springer: Berlin/Heidelberg, Germany, 2015; pp. 899–928. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Problem g01 | PSO_MS | PSO_ST | PSO_DYN |
| optimum | −15.000 | ||
| best OF | −15.000 | −15.000 | −15.0 |
| worst OF | −12.002 | −12.000 | −12.000 |
| mean | −14.443 | −13.938 | −13.920 |
| std | 0.89478 | 1.4333 | 1.4546 |
| Problem g02 | PSO_MS | PSO_ST | PSO_DYN |
| optimum | 0.803619 | ||
| best OF | 0.80357 | 0.80146 | 0.79358 |
| worst OF | 0.60963 | 0.52013 | 0.38285 |
| mean | 0.75896 | 0.70105 | 0.66597 |
| std | 0.063604 | 0.07356 | 0.087006 |
| Problem g04 | PSO_MS | PSO_ST | PSO_DYN |
| optimum | −30,665.539 | ||
| best OF | −30,666.0 | −30,666.0 | −31,207.0 |
| worst OF | −30,666.0 | −30,665.0 | −30,137.0 |
| mean | −30,666.0 | −30,665.0 | −31,138.2 |
| std | 2.20e-05 | 0.86587 | 252.2036 |
| Problem g06 | PSO_MS | PSO_ST | PSO_DYN |
| optimum | −6961.81388 | ||
| best OF | −6961.8 | −6973.0 | −6963.0 |
| worst OF | −6958.4 | −6973.0 | −6963.0 |
| mean | −6960.7 | −6973.0 | −6963.0 |
| std | 0.97521 | 0.0000 | 0.0000 |
| Problem g07 | PSO_MS | PSO_ST | PSO_DYN |
| optimum | 24.3062091 | ||
| best OF | 24.426 | 25.034 | 24.477 |
| worst OF | 27.636 | 30.203 | 30.112 |
| mean | 25.4129 | 28.508 | 27.043 |
| std | 1.1209 | 1.4351 | 1.8821 |
| Problem g08 | PSO_MS | PSO_ST | PSO_DYN |
| optimum | 0.095825 | ||
| best OF | 0.095825 | 0.095825 | 0.095825 |
| worst OF | 0.095825 | 0.095825 | 0.095825 |
| mean | 0.095825 | 0.095825 | 0.095825 |
| std | 6.96e-17 | 6.77e-17 | 7.10e-17 |
| Problem g09 | PSO_MS | PSO_ST | PSO_DYN |
| optimum | 680.6300573 | ||
| best OF | 680.64 | 680.63 | 680.63 |
| worst OF | 680.98 | 680.72 | 680.73 |
| mean | 680.73 | 680.66 | 680.66 |
| std | 0.079365 | 0.017526 | 0.018915 |
| Problem g12 | PSO_MS | PSO_ST | PSO_DYN |
| optimum | 1.0 | ||
| best OF | 1.0 | 1.0 | 1.0 |
| worst OF | 1.0 | 1.0 | 1.0 |
| mean | 1.0 | 1.0 | 1.0 |
| std | 0.0000 | 2.12e-15 | 0.0000 |
| Cross-Section | |||||
|---|---|---|---|---|---|
| Element | Ref. Sol.from [56] | PSO-Static | PSO-Dynamic | GA | PSO-MS |
| 1 | 28.920 | 29.6888 | 30.3092 | 30.145 | 30.372 |
| 2 | 0.100 | 18.3211 | 14.7464 | 0.100 | 0.110 |
| 3 | 24.070 | 19.9891 | 16.5717 | 22.466 | 23.644 |
| 4 | 13.960 | 18.2381 | 25.1945 | 15.112 | 15.391 |
| 5 | 0.100 | 2.3404 | 4.5489 | 0.101 | 0.101 |
| 6 | 0.560 | 20.8674 | 26.1207 | 0.543 | 0.496 |
| 7 | 21.950 | 21.1805 | 32.2698 | 21.667 | 20.984 |
| 8 | 7.690 | 16.0851 | 0.2168 | 7.577 | 7.410 |
| 9 | 0.100 | 6.0845 | 7.5871 | 0.100 | 0.103 |
| 10 | 22.090 | 25.5632 | 23.524 | 21.695 | 21.378 |
| best OF [lb] | 5076.310 | 6141.986 | 6333.035068 | 5063.250 | 5063.328 |
| worse OF [lb] | - | 8415.134 | 8675.749551 | 5144.148 | 5229.108 |
| mean [lb] | - | 7294.455 | 7501.394582 | 5079.744 | 5076.473 |
| std. dev. [lb] | - | 516.7823 | 475.3885728 | 14.1194 | 24.8666 |
| Cross-Section | |||||
|---|---|---|---|---|---|
| Bar Group | Ref. Sol.from [56] | PSO-Static | PSO-Dynamic | GA | PSO-MS |
| 1 | 0.100 | 2.054 | 1.116 | 0.010 | 0.011 |
| 2 | 1.800 | 2.675 | 2.670 | 2.023 | 1.976 |
| 3 | 2.300 | 1.402 | 1.942 | 2.941 | 2.989 |
| 4 | 0.200 | 3.388 | 0.166 | 0.010 | 0.010 |
| 5 | 0.100 | 0.204 | 0.342 | 0.010 | 0.011 |
| 6 | 0.800 | 0.453 | 1.985 | 0.671 | 0.690 |
| 7 | 1.800 | 1.274 | 1.976 | 1.673 | 1.689 |
| 8 | 3.000 | 0.048 | 2.345 | 2.694 | 2.654 |
| best OF [lb] | 546.010 | 568.186 | 596.058 | 545.236 | 545.249 |
| worse OF [lb] | - | 100,583.118 | 22,954.297 | 557.755 | 552.378 |
| mean [lb] | - | 1673.393 | 1122.518 | 547.828 | 546.003 |
| std. dev. [lb] | - | 9991.0201 | 3129.3192 | 2.0743 | 0.7879 |
| Cross-Section | |||||
|---|---|---|---|---|---|
| Bar Group | Ref. Sol.from [56] | PSO-Static | PSO-Dynamic | GA | PSO-MS |
| 1 | 2.026 | 2.176 | 0.746 | 1.801 | 1.856 |
| 2 | 0.533 | 0.661 | 0.539 | 0.545 | 0.523 |
| 3 | 0.100 | 2.686 | 0.523 | 0.100 | 0.100 |
| 4 | 0.100 | 1.771 | 2.660 | 0.100 | 0.100 |
| 5 | 1.157 | 1.662 | 2.316 | 1.311 | 1.301 |
| 6 | 0.569 | 0.276 | 1.051 | 0.511 | 0.519 |
| 7 | 0.100 | 0.158 | 0.642 | 0.100 | 0.100 |
| 8 | 0.100 | 0.986 | 2.370 | 0.100 | 0.100 |
| 9 | 0.514 | 0.271 | 0.757 | 0.531 | 0.539 |
| 10 | 0.479 | 1.240 | 0.793 | 0.520 | 0.507 |
| 11 | 0.100 | 0.517 | 0.453 | 0.100 | 0.100 |
| 12 | 0.100 | 0.378 | 1.754 | 0.107 | 0.101 |
| 13 | 0.158 | 0.119 | 2.236 | 0.157 | 0.157 |
| 14 | 0.550 | 0.794 | 1.677 | 0.534 | 0.540 |
| 15 | 0.345 | 1.363 | 0.824 | 0.386 | 0.403 |
| 16 | 0.498 | 1.190 | 0.830 | 0.561 | 0.564 |
| best OF [lb] | 379.310 | 629.108 | 662.148 | 380.150 | 379.753 |
| worse OF [lb] | - | 1054.764 | 1110.795 | 400.147 | 381.541 |
| mean [lb] | - | 874.024 | 854.233 | 383.377 | 380.150 |
| std. dev. [lb] | - | 88.8254 | 82.1187 | 3.7299 | 0.2766 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rosso, M.M.; Cucuzza, R.; Aloisio, A.; Marano, G.C. Enhanced Multi-Strategy Particle Swarm Optimization for Constrained Problems with an Evolutionary-Strategies-Based Unfeasible Local Search Operator. Appl. Sci. 2022, 12, 2285. https://doi.org/10.3390/app12052285
Rosso MM, Cucuzza R, Aloisio A, Marano GC. Enhanced Multi-Strategy Particle Swarm Optimization for Constrained Problems with an Evolutionary-Strategies-Based Unfeasible Local Search Operator. Applied Sciences. 2022; 12(5):2285. https://doi.org/10.3390/app12052285
Chicago/Turabian StyleRosso, Marco Martino, Raffaele Cucuzza, Angelo Aloisio, and Giuseppe Carlo Marano. 2022. "Enhanced Multi-Strategy Particle Swarm Optimization for Constrained Problems with an Evolutionary-Strategies-Based Unfeasible Local Search Operator" Applied Sciences 12, no. 5: 2285. https://doi.org/10.3390/app12052285