
Advanced Thermal Manikin for Thermal Comfort Assessment in Vehicles and Buildings

 , , ,
, , ,  and
and
Abstract
:Featured Application
Abstract
1. Introduction
1.1. General Considerations about the Thermal Comfort and Its Assessment
1.2. Thermal Manikins—Standards and Short History
2. Design Considerations for the SUZI Prototype
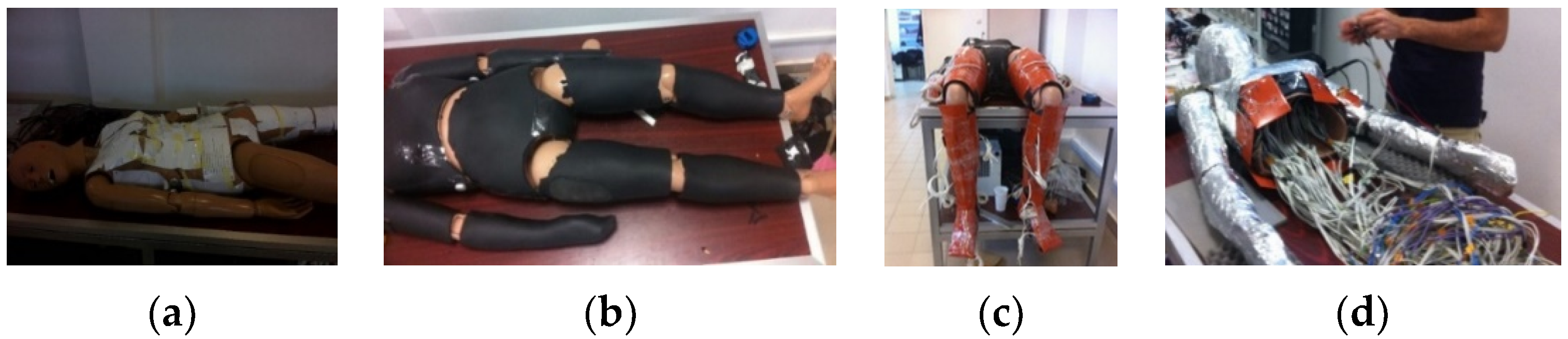
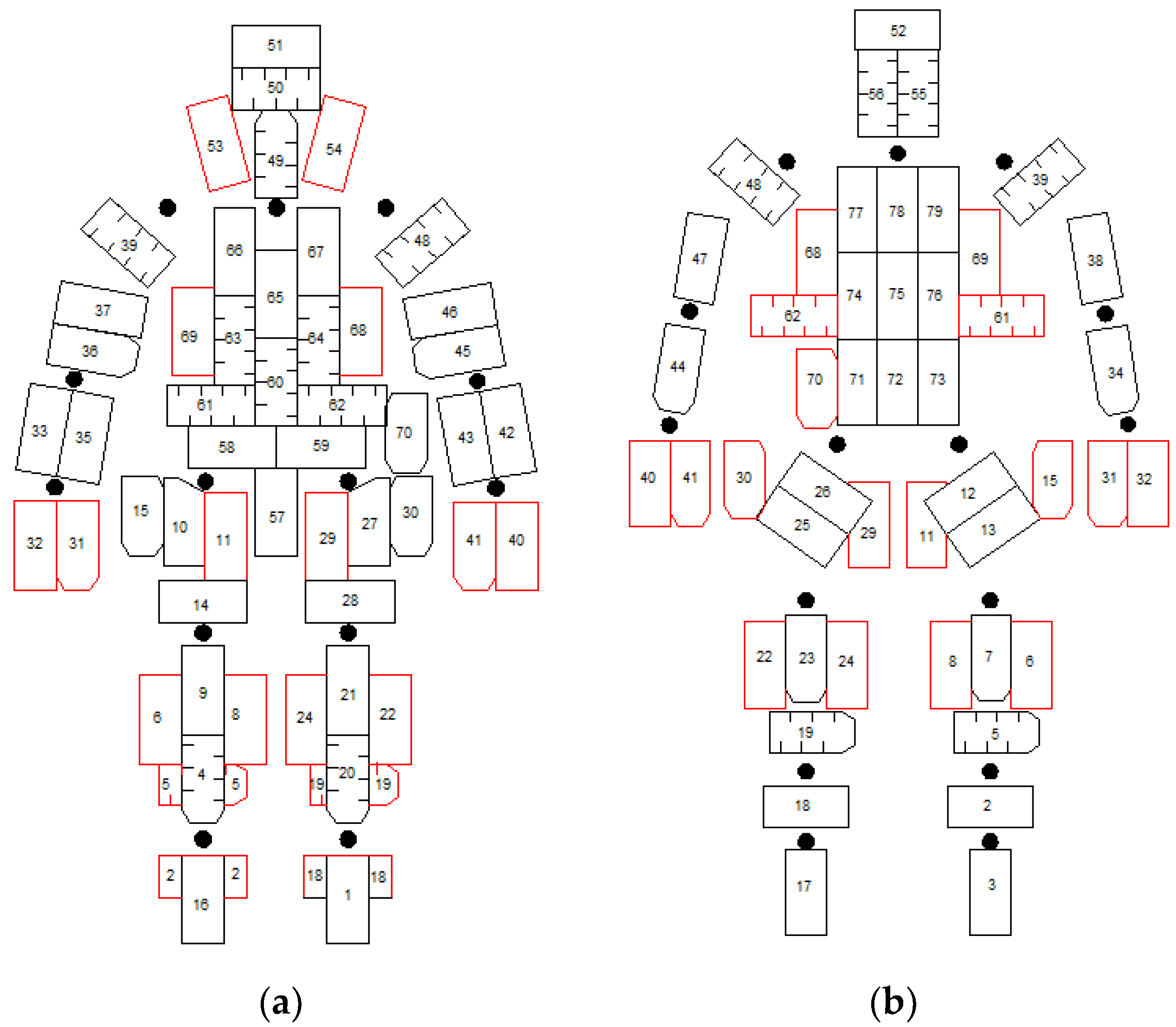
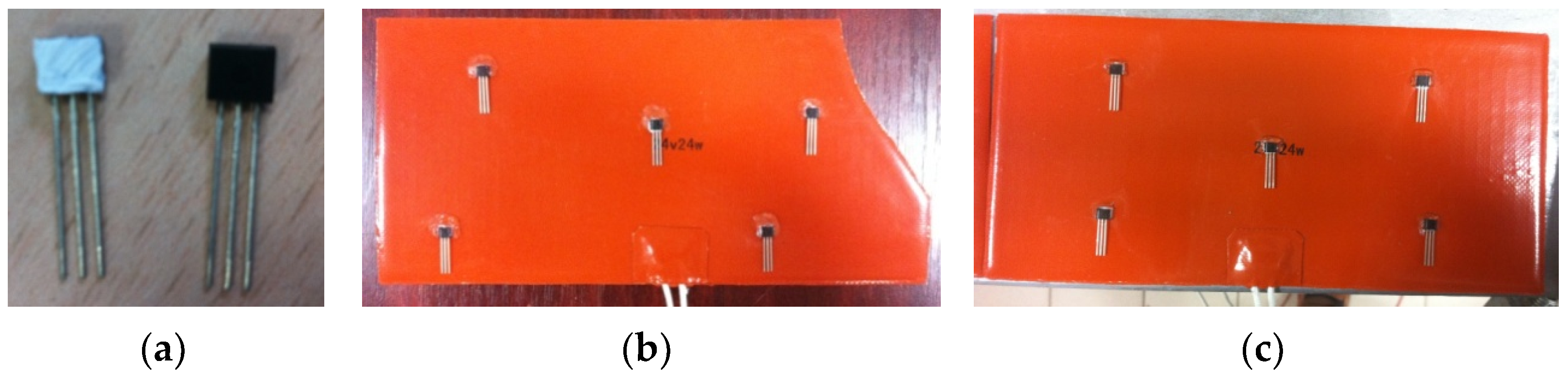
2.1. The Mechanical Structure and the Heating System
2.2. The Architecture of the Control System
2.3. The Control Law
2.4. The User Interface
3. Testing the Manikin Prototype and Results
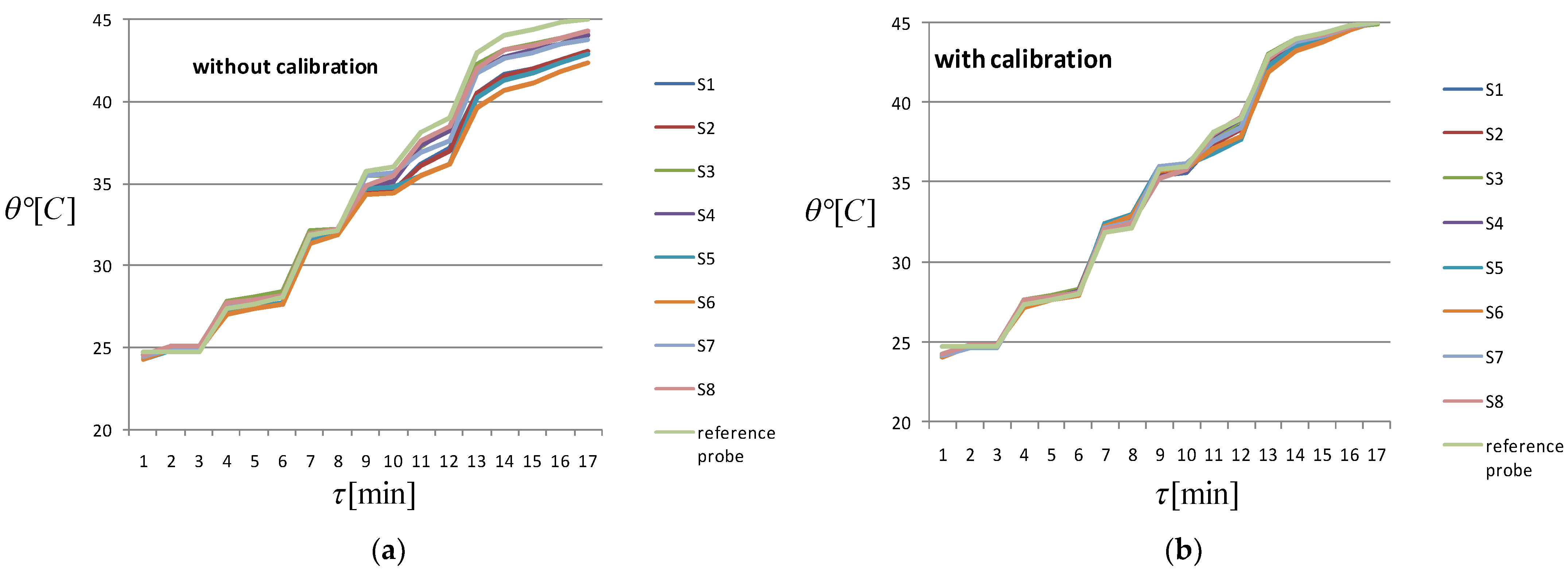
3.1. Calibration of the Advanced Thermal Manikin
3.2. Measuring the Equivalent Temperature
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Santamouris, M.; Asimakopoulos, D. Passive Cooling of Buildings, 1st ed.; James & James Science Publishers Ltd.: London, UK, 1996. [Google Scholar]
- ASHRAE. Thermal Environmental Conditions for Human Occupancy; ANSI/ASHRAE Standard 55-2004; American Society of Heating, Refrigerating and Air-Conditioning Engineers: Atlanta, GA, USA, 2004. [Google Scholar]
- Hensen, J.L.M. Literature review on thermal comfort in transient conditions. Build. Environ. 1990, 25, 309–316. [Google Scholar] [CrossRef]
- ISO 7730; Ergonomics of the Thermal Environment—Analytical Determination and Interpretation of Thermal Comfort Using Calculation of the Pmv and Ppd Indices and Local Thermal Comfort Criteria. 3rd ed. International Organization for Standardization (ISO): Geneva, Switzerland, 2005.
- Fanger, P.O. (Ed.) Thermal Comfort-Analysis and Applications in Environmental Engineering; Mcgraw-Hill: New York, NY, USA, 1970. [Google Scholar]
- Djongyang, N.; Tchinda, R.; Njomo, D. Thermal comfort: A review paper. Renew. Sustain. Energy Rev. 2010, 14, 2626–2640. [Google Scholar] [CrossRef]
- Nilsson, H.O. Thermal comfort evaluation with virtual manikin methods. Build. Environ. 2007, 42, 4000–4005. [Google Scholar] [CrossRef]
- ISO 14505-3:2006; Ergonomics of the thermal Environment-Evaluation of Thermal Environments in Vehicles Part 2: Determination of Equivalent Temperature. International Organization for Standardization (ISO): Geneva, Switzerland, 2006.
- Nilsson, H.O. Comfort Climate Evaluation with Thermal Manikin Methods and Computer Simulation Models, 3rd ed.; National Institute for Working Life: Stockholm, Sweden, 2004; p. 37. [Google Scholar]
- Madsen, T.O.B.K.N. Comparison between operative and equivalent temperature under typical indoor conditions. ASHRAE Trans. 1984, 90, 1077–1090. [Google Scholar]
- Nilsson, H.; Holmér, I.; Holmberg, S.; Sandberg, M. Thermal climate assessment in office environment—CFD calculations and thermal manikin measurements. In Proceedings of the International Conference on Air Distribution in Room, Roomvent 2000—Reading, Reading, UK, 9–12 July 2000; pp. 90–95. [Google Scholar]
- Nilsson, H.O.; Holmér, I. Definitions and Measurements of Equivalent Temperature, European Commission Cost Contract no smt4-ct95-2017 Development of Standard Test Methods for Evaluation of Thermal Climate in Vehicles; Department of Technology and Built Environment University of Gävle: Gävle, Sweden, 2002. [Google Scholar]
- Baron, J. Thinking and Deciding; Cambridge University Press: Cambridge, UK, 2008; Volume 4. [Google Scholar]
- Baron, J. Against Bioethics; MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Baron, J. Norm-endorsement utilitarianism and the nature of utility. Econ. Philos. 1996, 12, 165–182. [Google Scholar] [CrossRef]
- Burke, R.; Rugh, J.; Farrington, R. ADAM—The Advanced Automotive Manikin. In Proceedings of the International Meeting on Thermal Manikins and Modelling, Strasbourg, France, 29–30 September 2003. [Google Scholar]
- Lebbin, P.; Hosni, M.; Gielda, T. Design and manufacturing of two thermal observation manikins for automobile applications. In Proceedings of the International Meeting on Thermal Manikins and Modelling, Strasbourg, France, 29–30 September 2003. [Google Scholar]
- Danca, P.; Nastase, I.; Bode, F.; Croitoru, C.; Dogeanu, A.; Meslem, A. Evaluation of the thermal comfort for its occupants inside a vehicle during summer. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 595, p. 012027. [Google Scholar]
- Danca, P.; Bode, F.; Dogeanu, A.; Croitoru, C.; Sandu, M.; Meslem, A.; Nastase, I. Experimental study of thermal comfort in a vehicle cabin during the summer season. E3S Web Conf. 2019, 111, 01048. [Google Scholar] [CrossRef] [Green Version]
- Dogeanu, A.; Iatan, A.; Croitoru, C.; Nastase, I. Conception of a real human shaped thermal manikin for comfort assesment. In PhD & DLA Symposium; University of Pecs: Pesc, Hungary, 2012. [Google Scholar]
- Dogeanu, A.; Florin, B.; Iatan, A.; Croitoru, C.; Nastase, I. Conception of a simplified seated thermal manikin for CFD validation purposes. Rom. J. Civ. Eng. 2013, 5, 27. [Google Scholar]
- Gao, N.P.; Zhang, H.; Niu, J.L. Investigating indoor air quality and thermal comfort using a numerical thermal manikin. Indoor Built Environ. 2007, 16, 7–17. [Google Scholar] [CrossRef]
- Croitoru, C.; Nastase, I.; Bode, F.; Cojocaru, G. Assessment of virtual thermal manikins for thermal comfort numerical studies. Verification and validation. E3S Web Conf. 2019, 111, 02018. [Google Scholar] [CrossRef]
- Tacutu, L.; Nastase, I.; Bode, F.; Dogeanu, A.; Croitoru, C. Interaction between a local and a general ventilation system for an operating room with patient. In Proceedings of the 2019 International Conference on Energy and Environment (CIEM), Timisoara, Romania, 17–18 October 2019; pp. 348–353. [Google Scholar]
- Bode, F.; Tacutu, L.; Croitoru, C.; Nastase, I. Numerical and experimental study for the development of an advanced model of an operating room with surgeons and patient. In Proceedings of the 2017 International Conference on ENERGY and ENVIRONMENT (CIEM), Bucharest, Romania, 19–20 October 2017; pp. 447–451. [Google Scholar]
- Lee, Y.Y.; Md Din, M.F.; Noor, Z.Z.; Iwao, K.; Mat Taib, S.; Singh, L.; Abd Khalid, N.H.; Anting, N.; Aminudin, E. Surrogate human sensor for human skin surface temperature measurement in evaluating the impacts of thermal behaviour at outdoor environment. Measurement 2018, 118, 61–72. [Google Scholar] [CrossRef]
- Shi, S.; Li, Y.; Zhao, B. Deposition velocity of fine and ultrafine particles onto manikin surfaces in indoor environment of different facial air speeds. Build. Environ. 2014, 81, 388–395. [Google Scholar] [CrossRef]
- Holmér, I. Thermal manikin history and applications. Eur. J. Appl. Physiol. 2004, 92, 614–618. [Google Scholar] [CrossRef]
- Nayak, R.; Houshyar, S. 7—Comparison of manikin tests with wearer trials. In Manikins for Textile Evaluation; Woodhead Publishing: Sawston, UK, 2017; pp. 159–171. [Google Scholar] [CrossRef]
- Jambunathan, K.; Lai, E.; Moss, M.A.; Button, B.L. A review of heat transfer data for single circular jet impingement. Int. J. Heat Fluid Flow 1992, 13, 106–115. [Google Scholar] [CrossRef]
- Ursu, I.; Guţă, D.; Croitoru, C.; Danca, P.; Nastase, I. Advanced Thermal Manikin Prototype with Neuro-fuzzy Control System. In Proceedings of the COBEE 2018, Melbourne, Australia, 5–9 February 2018. [Google Scholar]
- Alahmer, A.; Mayyas, A.; Mayyas, A.A.; Omar, M.A.; Shan, D. Vehicular thermal comfort models; a comprehensive review. IAppl. Therm. Eng. 2011, 31, 995–1002. [Google Scholar] [CrossRef]
- Sakoi, T.; Tsuzuki, K.; Kato, S.; Ooka, R.; Song, D.; Zhu, S. Thermal comfort, skin temperature distribution, and sensible heat loss distribution in the sitting posture in various asymmetric radiant fields. Build. Environ. 2007, 42, 3984–3999. [Google Scholar] [CrossRef]
- Angel, D.; Cristiana, C.; Ilinca, N.; Mihnea, S.; Florin, B. Comfort evaluation using a thermal manikin. Comparison to subjective perception. In Proceedings of the SGEM2016 Conference, Albena, Bulgaria, 30 June–6 July 2016. [Google Scholar]
- Croitoru, C.; Nastase, I.; Voicu, I.; Meslem, A.; Sandu, M. Thermal Evaluation of an Innovative Type of Unglazed Solar Collector for Air Preheating. Energy Procedia 2016, 85, 149–155. [Google Scholar] [CrossRef]
- Halanay, A.; Ursu, I. Stability of equilibria of some switched nonlinear systems with applications to control synthesis for electrohydraulic servomechanisms. IMA J. Appl. Math. 2009, 74, 361–373. [Google Scholar] [CrossRef]
- Ouhimi, P.; Lechartier, T.; Danca, P.; Fabian, C. Thermal comfort evaluation inside vehicles with classical indices—Experimental approach. Rom. J. Civ. Eng. 2016, 7, 178. [Google Scholar]
- Vartires, A.; Dogeanu, A.; Danca, P. The human thermal comfort evaliation inside the passenger compartment. In Proceedings of the 15th International Multidisciplinary Scientific Geoconference, Albena, Bulgaria, 18–24 June 2015; pp. 1113–1120. [Google Scholar]
- Croitoru, C. Studii Teoretice și Experimentale Referitoare la Influenţa Turbulenţei Aerului din Încăperile Climatizate Asupra Confortului Termic. Ph.D. Thesis, Technical University of Civil Engineering of Bucharest, București, Romania, 2011. [Google Scholar]
- Operating Instructions—Lauda Eco silver—Heating and Cooling Thermostats with Control Head Silver. Available online: http://interlab.lt/download/ECO_Silver_instruction_manual.pdf.7559e65ad7b1afacdfbac0d98e4009f1 (accessed on 15 September 2021).
- Gardon, R.; Akfirat, J.C. The role of turbulence in determining the heat-transfer characteristics of impinging jets. Int. J. Heat Mass Transf. 1965, 8, 1261–1272. [Google Scholar] [CrossRef]
- Ioan, U.; Felicia, U.; Lucian, I. Neuro-fuzzy synthesis of flight control electrohydraulic servo. Aircr. Eng. Aerosp. Technol. 2001, 73, 465–472. [Google Scholar] [CrossRef]
- Ursu, I.; Tecuceanu, G.; Toader, A.; Calinoiu, C. Switching neuro-fuzzy control with antisaturating logic. Experimental results for hydrostatic servoactuators. Proc. Rom. Acad. Ser. A Math. Phys. Tech. Sci. Inf. Sci. 2011, 12, 231–238. [Google Scholar]
- Ursu, I.; Ursu, F. Airplane ABS control synthesis using fuzzy logic. J. Intell. Fuzzy Syst. 2005, 16, 23–32. [Google Scholar]
- Wang, L.X. Combining mathematical model and heuristics into controllers: An adaptive fuzzy control approach. In Proceedings of the 1994 33rd IEEE Conference on Decision and Control, Lake Buena Vista, FL, USA, 14–16 December 1994; Volume 4124, pp. 4122–4127. [Google Scholar]
- Quintela, D.; Gaspar, A.; Borges, C. Analysis of sensible heat exchanges from a thermal manikin. Eur. J. Appl. Physiol. 2004, 92, 663–668. [Google Scholar] [CrossRef]
- de Dear, R.J.; Arens, E.; Hui, Z.; Oguro, M. Convective and radiative heat transfer coefficients for individual human body segments. Int. J. Biometeorol. 1997, 40, 141–156. [Google Scholar] [CrossRef] [Green Version]
- Oliveira, A.V.M.; Gaspar, A.R.; Francisco, S.C.; Quintela, D.A. Convective heat transfer from a nude body under calm conditions: Assessment of the effects of walking with a thermal manikin. Int. J. Biometeorol. 2012, 56, 319–332. [Google Scholar] [CrossRef] [PubMed]
- Oliveira, A.V.M.; Gaspar, A.R.; Francisco, S.C.; Quintela, D.A. Analysis of natural and forced convection heat losses from a thermal manikin: Comparative assessment of the static and dynamic postures. J. Wind Eng. Ind. Aerodyn. 2014, 132, 66–76. [Google Scholar] [CrossRef]
- Fojtlín, M.; Fišer, J.; Jícha, M. Determination of convective and radiative heat transfer coefficients using 34-zones thermal manikin: Uncertainty and reproducibility evaluation. Exp. Therm. Fluid Sci. 2016, 77, 257–264. [Google Scholar] [CrossRef]
- Nilsson, H.; Holmér, I.; Bohm, M.; Norén, O. Equivalent temperature and thermal sensation—Comparison with subjective responses. In Proceedings of the Comfort in the Automotive Industry—Recent Development and Achievements; IOP Publishing: Bologna, Italy, 1997; pp. 157–162. [Google Scholar]
- Danca, P.A. Ventilation Strategies for Improving the Indoor Environment Quality in Vehicles. Ph.D. Thesis, Technical University of Civil Engineering of Bucharest, București, Romania, University of Rennes 1, Rennes, France, 2018. [Google Scholar]
- Wang, L.-X. Combining mathematical model and heuristics into controllers: An adaptive fuzzy control approach. Fuzzy Sets Syst. 1997, 89, 151–156. [Google Scholar] [CrossRef]
- Nastase, I.; Croitoru, C.; Lungu, C. A Questioning of the Thermal Sensation Vote Index Based on Questionnaire Survey for Real Working Environments. Energy Procedia 2016, 85, 366–374. [Google Scholar] [CrossRef] [Green Version]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Body Regions | Right Foot | Right Leg | Right Thigh | Left Foot | Left Leg | Left Thigh | Right Hand | Right Arm | Right Upper Arm | Left Hand | Left Arm | Left Upper Arm | Head | Pelvic Region | Chest | Back |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Anatomic temperature distribution (°C) | 27 | 27 | 27 | 27 | 27 | 27 | 30 | 30 | 30 | 30 | 30 | 30 | 34 | 32 | 32 | 32 |
| Uniform temperature distribution (°C) | 34 | 34 | 34 | 34 | 34 | 34 | 34 | 34 | 34 | 34 | 34 | 34 | 34 | 34 | 34 | 34 |
| Temperature | Anatomic Temperature Distribution | Uniform Temperature Distribution | ||
|---|---|---|---|---|
| Segment | hc (W/m2K) | hr (W/m2K) | hc (W/m2K) | hr (W/m2K) |
| Head | 4.74 | 4.47 | 4.68 | 4.58 |
| Torso | 4.76 | 4.53 | 3.06 | 2.41 |
| Right thigh | 4.16 | 3.32 | 4.16 | 3.88 |
| Right tibia | 3.06 | 2.11 | 5.12 | 5.49 |
| Right foot | 4.68 | 4.37 | 4.22 | 4.30 |
| Right forearm | 6.86 | 5.73 | 4.69 | 4.17 |
| Right arm | 4.64 | 4.28 | 4.96 | 4.94 |
| Right hand | 4.96 | 4.92 | 5.18 | 4.94 |
| Left hand | 4.96 | 4.92 | 4.64 | 4.52 |
| Left arm | 4.62 | 4.23 | 4.96 | 4.95 |
| Left forearm | 6.83 | 5.66 | 6.83 | 6.44 |
| Left thigh | 4.69 | 4.38 | 4.62 | 4.49 |
| Left tibia | 2.91 | 2.83 | 4.74 | 5.32 |
| Left foot | 5.12 | 5.23 | 4.64 | 4.52 |
| Back | 5.87 | 6.75 | 4.76 | 4.69 |
| Pelvis | 4.64 | 4.29 | 5.87 | 5.02 |
| Manikin Name/Body Part | Monika [47] | Maria [48] | Maria [49] | Maria [50] | Newton [51] | Suzi (Current Study) |
|---|---|---|---|---|---|---|
| hc (W/m2 °C) | ||||||
| Left foot | 4.2 | 4.4 | 4.6 | 4.4 | 6.0 | 4.6 |
| Right foot | 4.2 | 4.5 | 4.7 | 4.4 | 6.3 | 4.2 |
| Left leg | 4.0 | 3.5 | 3.3 | 3.4 | 4.5 | 4.7 |
| Right leg | 4.0 | 3.8 | 3.5 | 3.9 | 4.5 | 5.1 |
| Left thigh | 3.7 | 3.7 | 3.7 | 3.9 | 4.4 | 4.6 |
| Right thigh | 3.7 | 3.5 | 3.9 | 3.9 | 4.3 | 4.2 |
| Pelvic region | 2.8 | 2.8 | 2.6 | 2.8 | 4.4 | 5.9 |
| Head | 3.7 | 4.7 | 4.5 | 4.3 | 3.2 | 4.7 |
| Left hand | 4.5 | 4.9 | 4.1 | 5.3 | - | 4.6 |
| Right hand | 4.5 | 4.3 | 4.2 | 4.1 | - | 5.2 |
| Left arm | 3.8 | 4.1 | 3.6 | 3.7 | 4.1 | 5.0 |
| Right arm | 3.8 | 10.3 | 3.8 | 3.6 | 4.0 | 5.0 |
| Left upper arm | 3.4 | 3.0 | 3.1 | 3.2 | 4.2 | 6.8 |
| Right upper arm | 3.4 | 2.7 | 3.3 | 3.4 | 3.9 | 4.7 |
| Chest | 3.0 | 2.3 | 2.2 | 2.3 | 3.1 | 3.1 |
| Back | 2.6 | 2.2 | 2.6 | 2.8 | 3.4 | 4.8 |
| Manikin Name/Body Part | Monika [46] | Newton [51] | Suzy (Current Study) |
|---|---|---|---|
| hr (W/m2 °C) | |||
| Left foot | 4.2 | 5.2 | 4.5 |
| Right foot | 4.2 | 4.8 | 4.3 |
| Left leg | 5.4 | 5.2 | 5.3 |
| Right leg | 5.4 | 4.9 | 5.5 |
| Left thigh | 4.6 | 3.8 | 4.5 |
| Right thigh | 4.6 | 3.4 | 3.9 |
| Pelvic region | 4.8 | 4.9 | 5.0 |
| Head | 3.9 | 3.0 | 4.6 |
| Left hand | 3.9 | - | 4.5 |
| Right hand | 3.9 | - | 4.9 |
| Left arm | 5.2 | 4.4 | 5.0 |
| Right arm | 5.2 | 4.0 | 4.9 |
| Left upper arm | 4.8 | 4.2 | 5.0 |
| Right upper arm | 4.8 | 4.4 | 4.2 |
| Chest | 3.4 | 4.4 | 2.4 |
| Back | 4.6 | 5.8 | 4.7 |
| Manikin Name/Body Part | Monika [46] | Maria [48] | Maria [49] | Maria [50] | Newton [51] | Suzi (Current Study) |
|---|---|---|---|---|---|---|
| hc (W/m2 °C) | ||||||
| Left foot | 9.48% | 4.41% | 0.86% | 5.17% | 29.31% | 12.17% |
| Right foot | 0.00% | 7.96% | 11.90% | 4.76% | 50.00% | 12.30% |
| Left leg | 15.61% | 25.26% | 30.38% | 28.27% | 5.06% | 17.02% |
| Right leg | 21.88% | 25.51% | 31.64% | 23.83% | 12.11% | 18.90% |
| Left thigh | 19.91% | 20.07% | 19.91% | 15.58% | 4.76% | 13.04% |
| Right thigh | 11.06% | 15.11% | 6.25% | 6.25% | 3.37% | 6.74% |
| Pelvic region | 52.30% | 52.73% | 55.71% | 52.30% | 25.04% | 39.83% |
| Head | 20.94% | −0.23% | 3.85% | 8.12% | 31.62% | 10.99% |
| Left hand | 3.02% | −6.00% | 11.64% | 14.22% | - | 14.73% |
| Right hand | 13.46% | 16.70% | 19.23% | 21.15% | - | 14.23% |
| Left arm | 23.39% | 17.18% | 27.42% | 25.40% | 17.34% | 19.00% |
| Right arm | 23.39% | 107.08% | 23.39% | 27.42% | 19.35% | 16.66% |
| Left upper arm | 50.22% | 55.36% | 54.61% | 53.15% | 38.51% | 41.91% |
| Right upper arm | 27.51% | 41.91% | 29.64% | 27.51% | 16.84% | 24.11% |
| Chest | 1.96% | 23.57% | 28.10% | 24.84% | −1.31% | 13.97% |
| Back | 45.38% | 53.86% | 45.38% | 41.18% | 28.57% | 36.11% |
| Manikin Name/Body Part | Monika [46] | Newton [51] | Suzy (Current Study) |
|---|---|---|---|
| Left foot | 7.08% | −15.04% | 2.96% |
| Right foot | 2.33% | −11.63% | 10.03% |
| Left leg | 1.50% | 2.26% | 33.02% |
| Right leg | 1.64% | 10.75% | 4.18% |
| Left thigh | 2.45% | 15.37% | 6.96% |
| Right thigh | 18.56% | 12.37% | 19.89% |
| Pelvic region | 4.38% | 2.39% | 7.23% |
| Head | 14.85% | 34.50% | 18.97% |
| Left hand | 13.72% | - | 43.5% |
| Right hand | 20.41% | - | 28.30% |
| Left arm | 5.05% | 11.11% | 4.15% |
| Right arm | 5.26% | 19.03% | 8.87% |
| Left upper arm | 3.03% | 15.15% | 11.66% |
| Right upper arm | 14.29% | 3.57% | 9.23% |
| Chest | 41.08% | 80.50% | 57.43% |
| Back | 1.92% | 22.60% | 4.67% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ion-Guţă, D.D.; Ursu, I.; Toader, A.; Enciu, D.; Dancă, P.A.; Nastase, I.; Croitoru, C.V.; Bode, F.I.; Sandu, M. Advanced Thermal Manikin for Thermal Comfort Assessment in Vehicles and Buildings. Appl. Sci. 2022, 12, 1826. https://doi.org/10.3390/app12041826
Ion-Guţă DD, Ursu I, Toader A, Enciu D, Dancă PA, Nastase I, Croitoru CV, Bode FI, Sandu M. Advanced Thermal Manikin for Thermal Comfort Assessment in Vehicles and Buildings. Applied Sciences. 2022; 12(4):1826. https://doi.org/10.3390/app12041826
Chicago/Turabian StyleIon-Guţă, Dragoş Daniel, Ioan Ursu, Adrian Toader, Daniela Enciu, Paul Alexandru Dancă, Ilinca Nastase, Cristiana Verona Croitoru, Florin Ioan Bode, and Mihnea Sandu. 2022. "Advanced Thermal Manikin for Thermal Comfort Assessment in Vehicles and Buildings" Applied Sciences 12, no. 4: 1826. https://doi.org/10.3390/app12041826