
Analysis of Edge Method Accuracy and Practical Multidirectional Modulation Transfer Function Measurement

Abstract
:1. Introduction
- (1)
- The main factors that affect the accuracy of the edge method, such as edge angle, OSR, ROI, edge contrast, and random noise, are quantitatively simulated and analyzed so as to provide a universal parameter determination reference for edge method application in RS imaging fields.
- (2)
- To further solve the problem of stability, accuracy, and practicability of multidirectional MTF measurement by edge method, according to the quantitative analysis results of influencing factors, an adaptive determination model of optimal OSR and binning PS based on edge angle is proposed. An automatic ROI extraction model of multi-position & multi-size based on edge angle & image size is proposed. By coupling the measurement states of multi-ROI extraction and multi-PS binning, the robustness, accuracy, and practicability of the edge method are comprehensively improved.
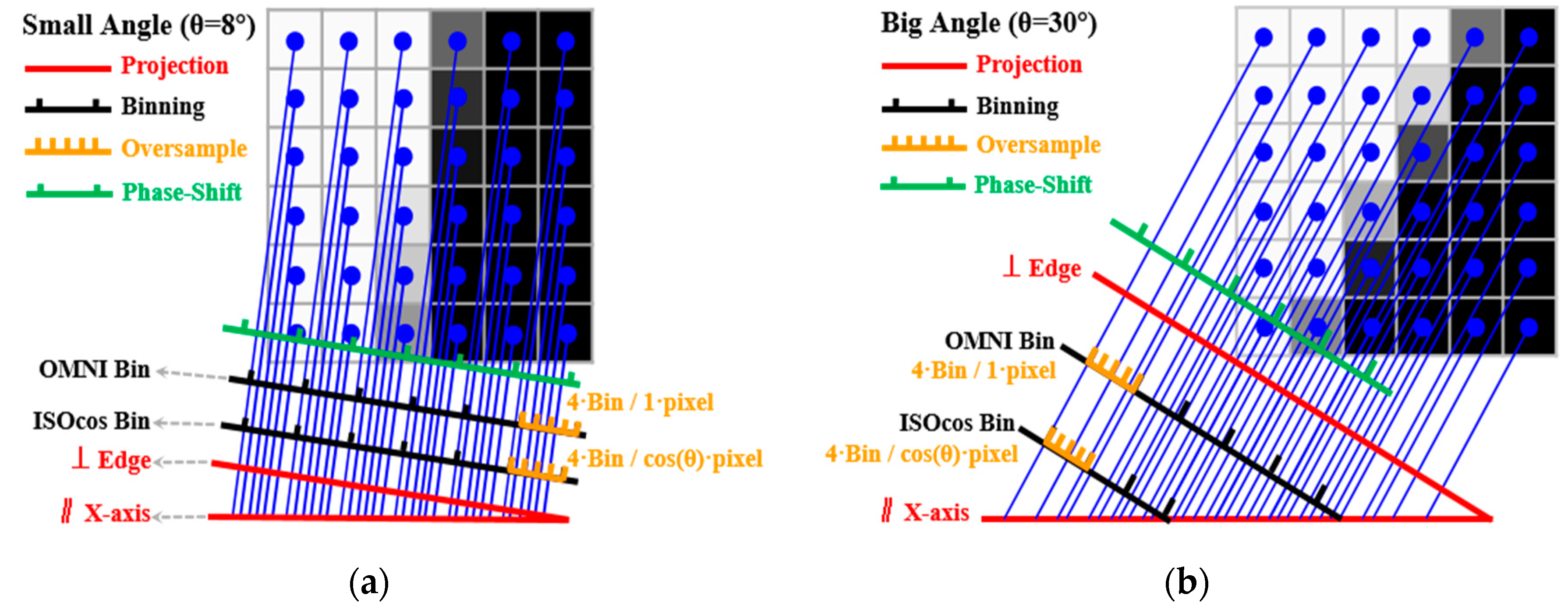
2. Conventional Edge-Based MTF Measurement Methods
2.1. Imaging Degradation Process of Edge Target
2.2. MTF Measurement Process of Edge Method
2.3. Analysis of Conventional Edge Method
3. Analysis of Edge Method Accuracy
3.1. Edge Angle
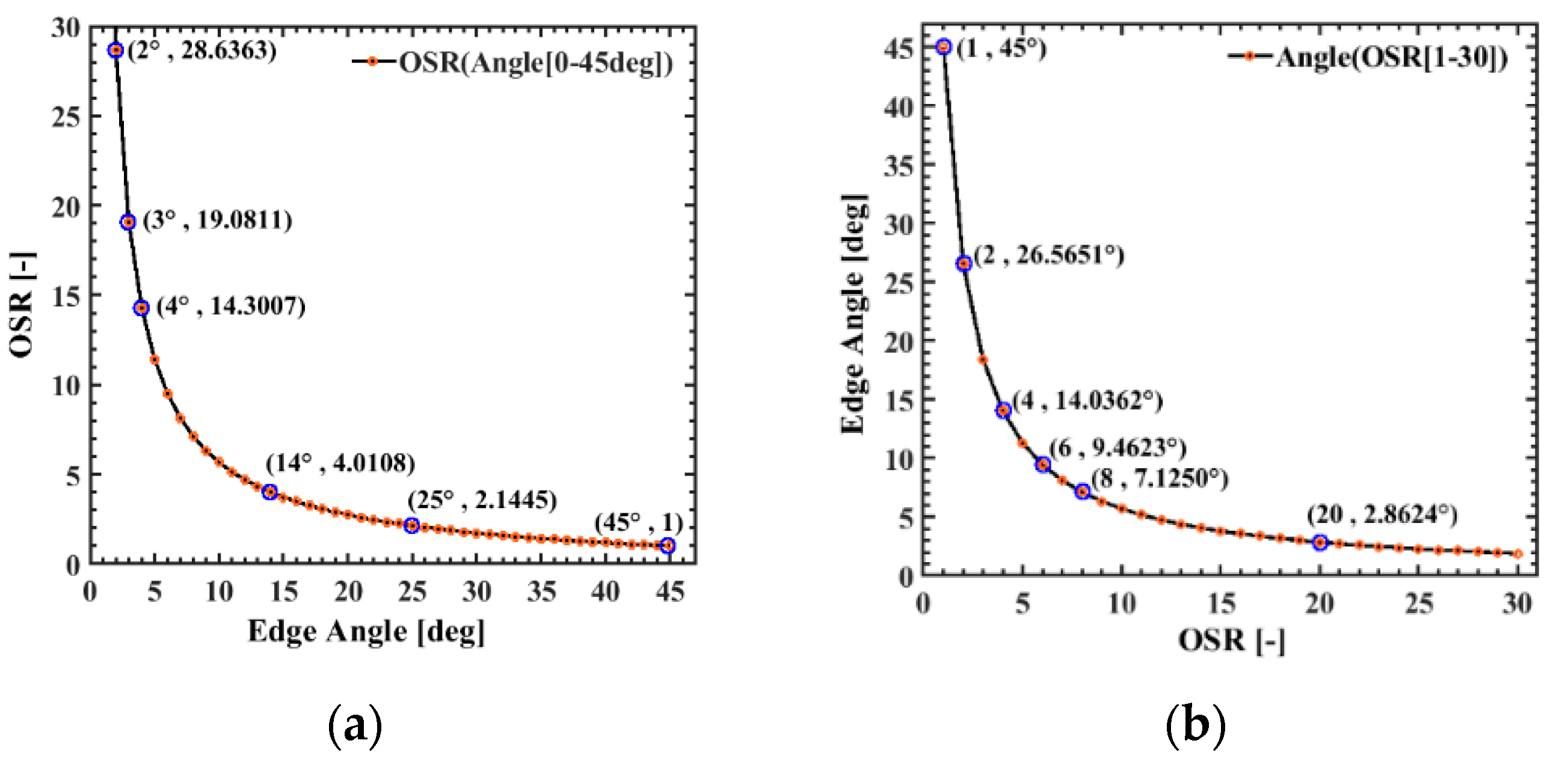
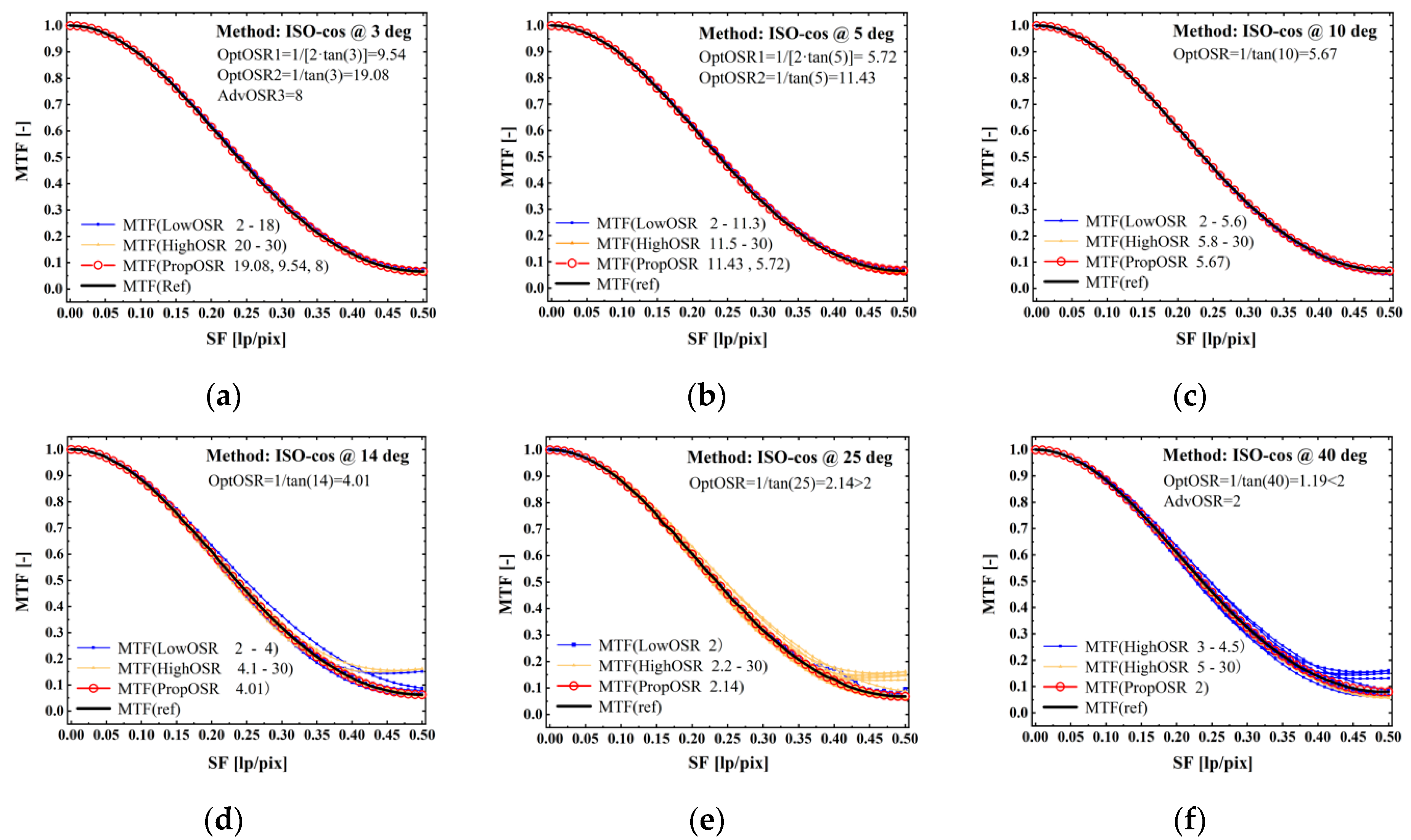
3.2. Oversampling Ratio
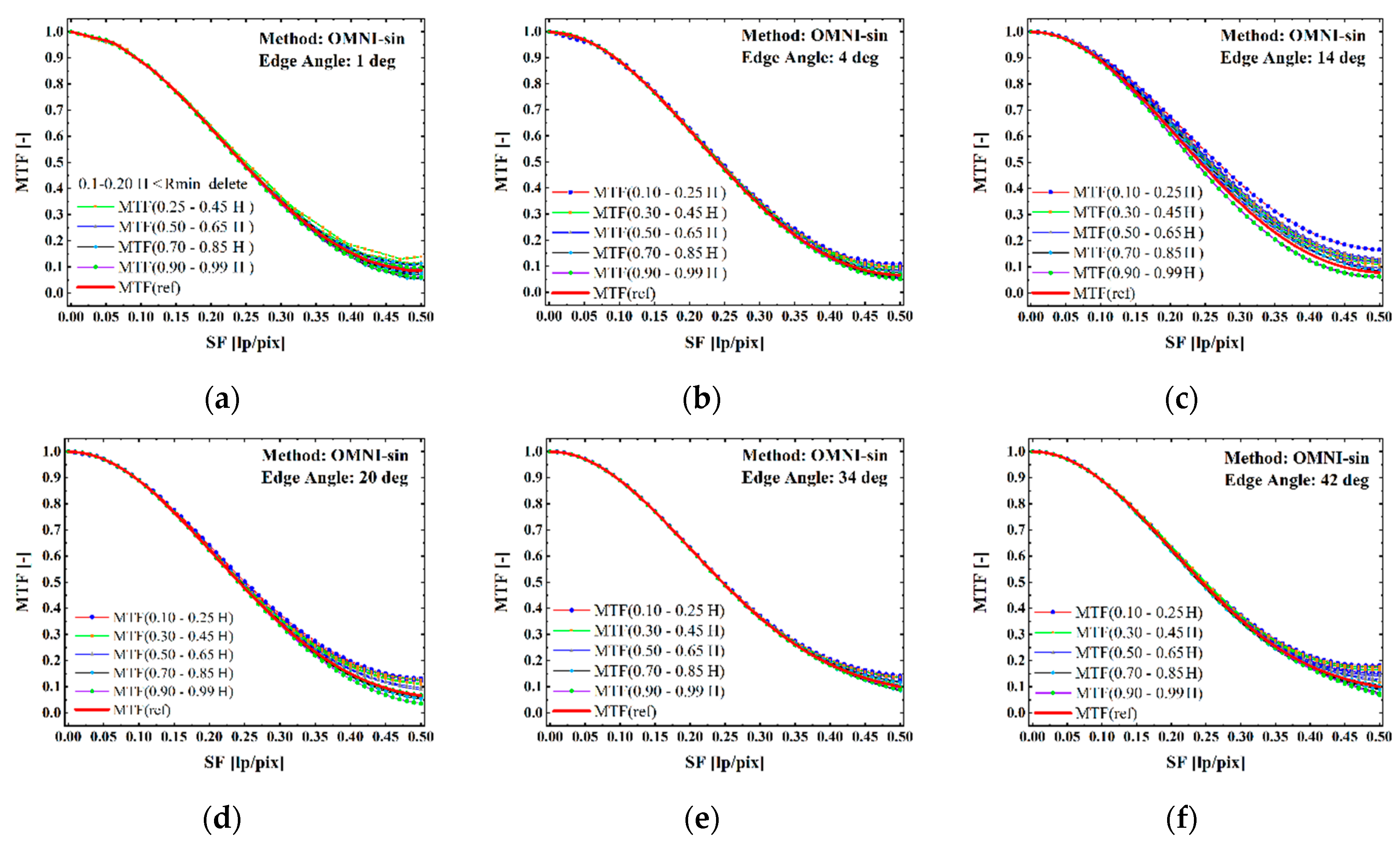
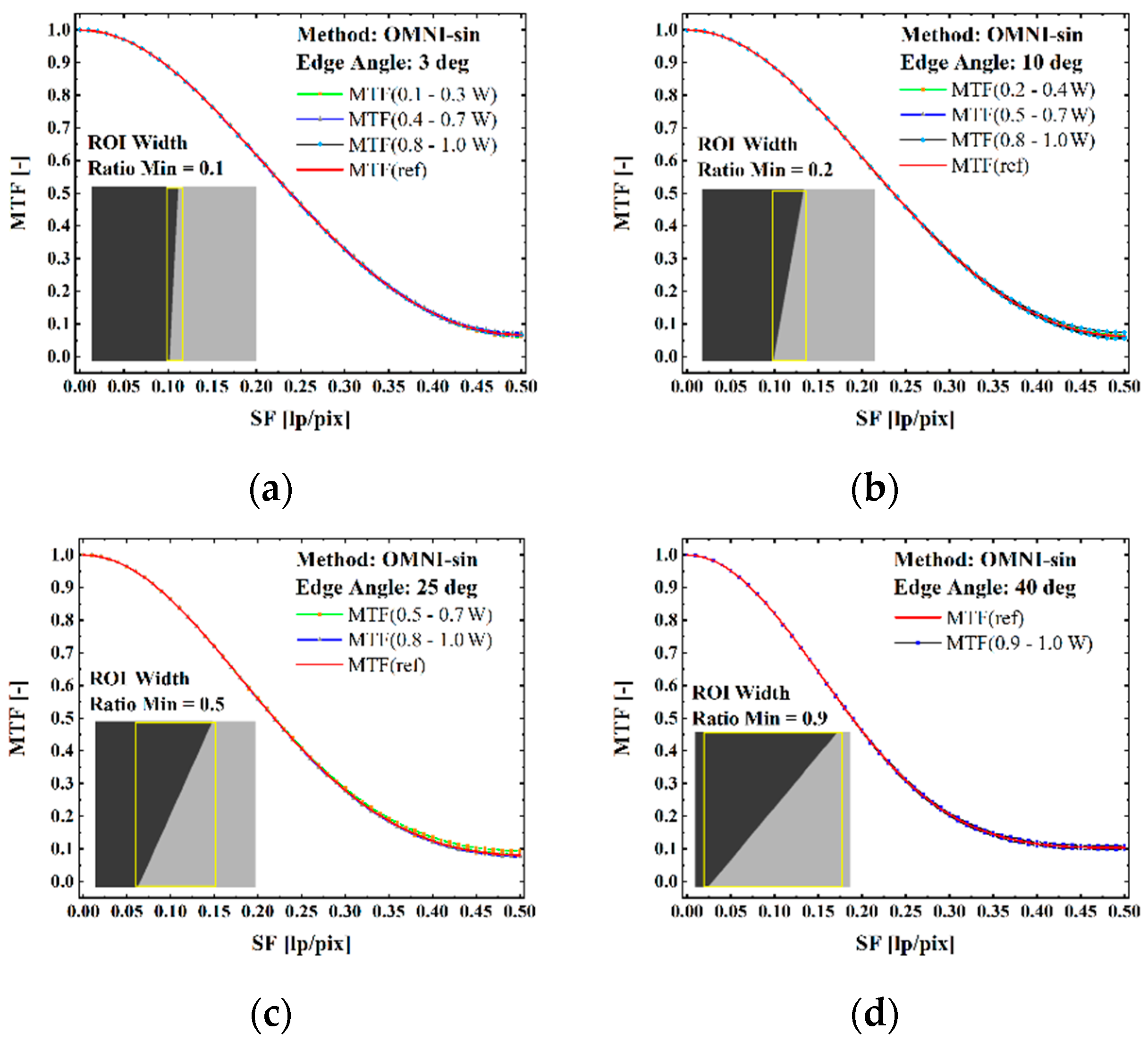
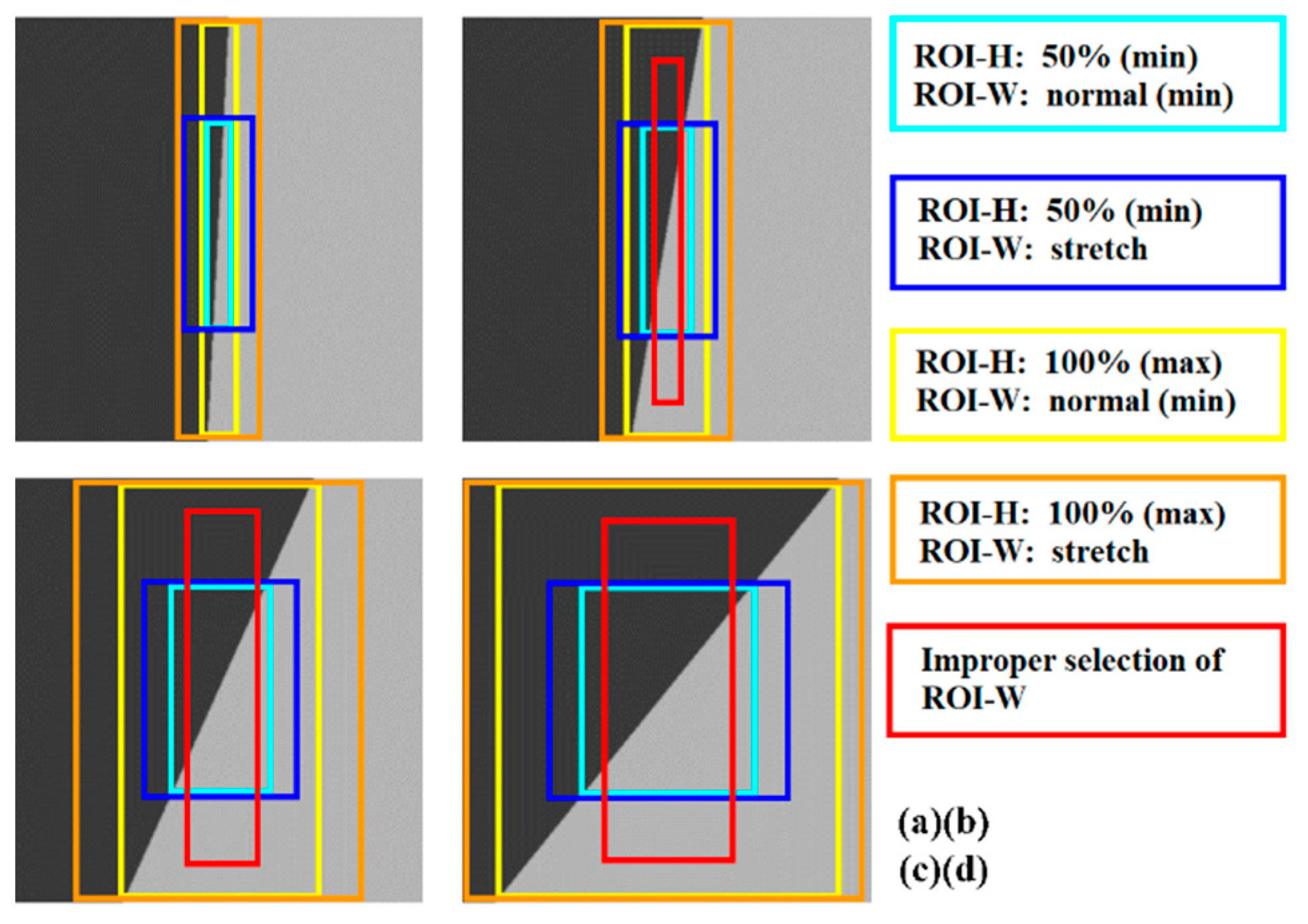
3.3. Region of Interest (ROI)
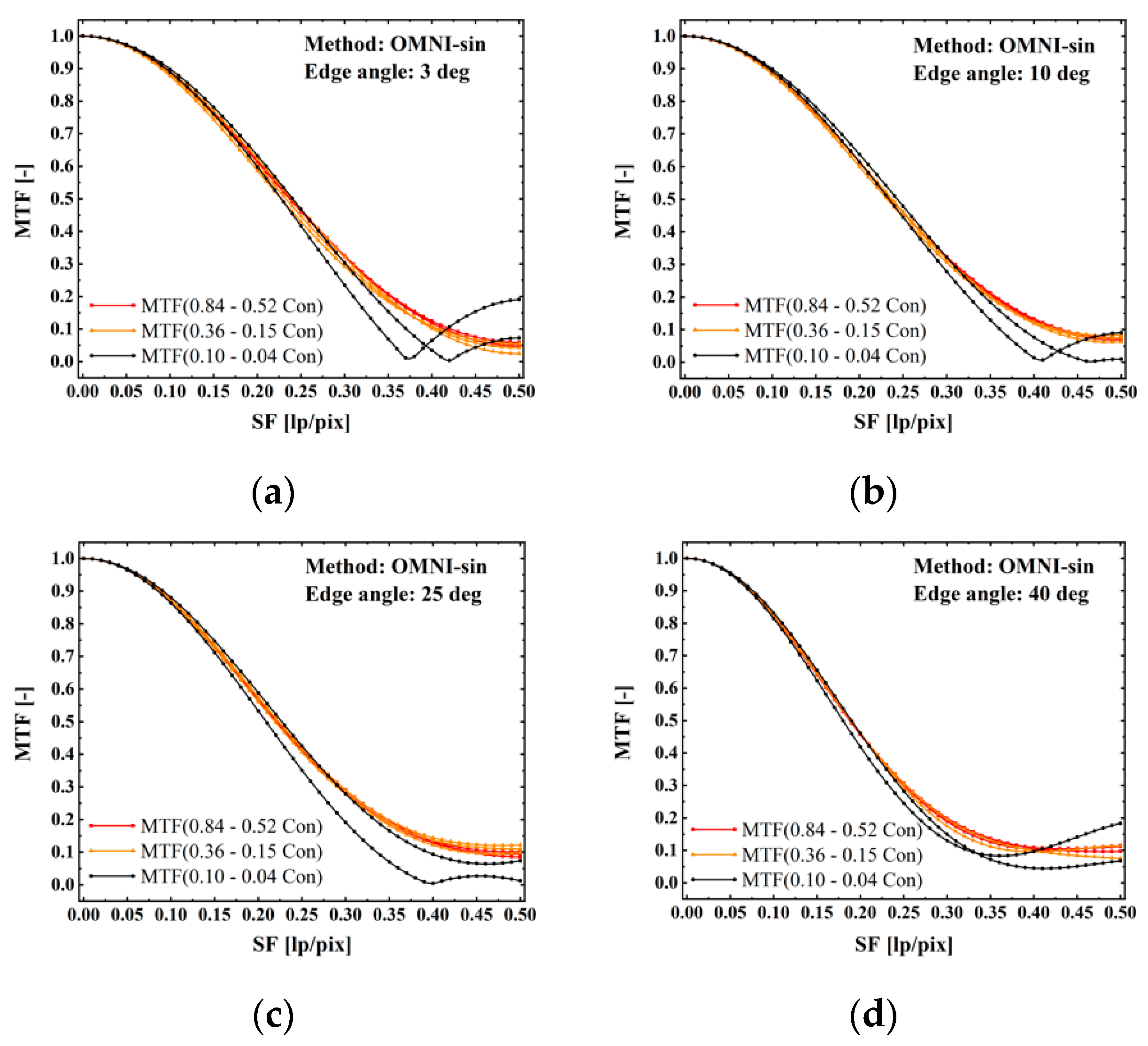
3.4. Edge Contrast
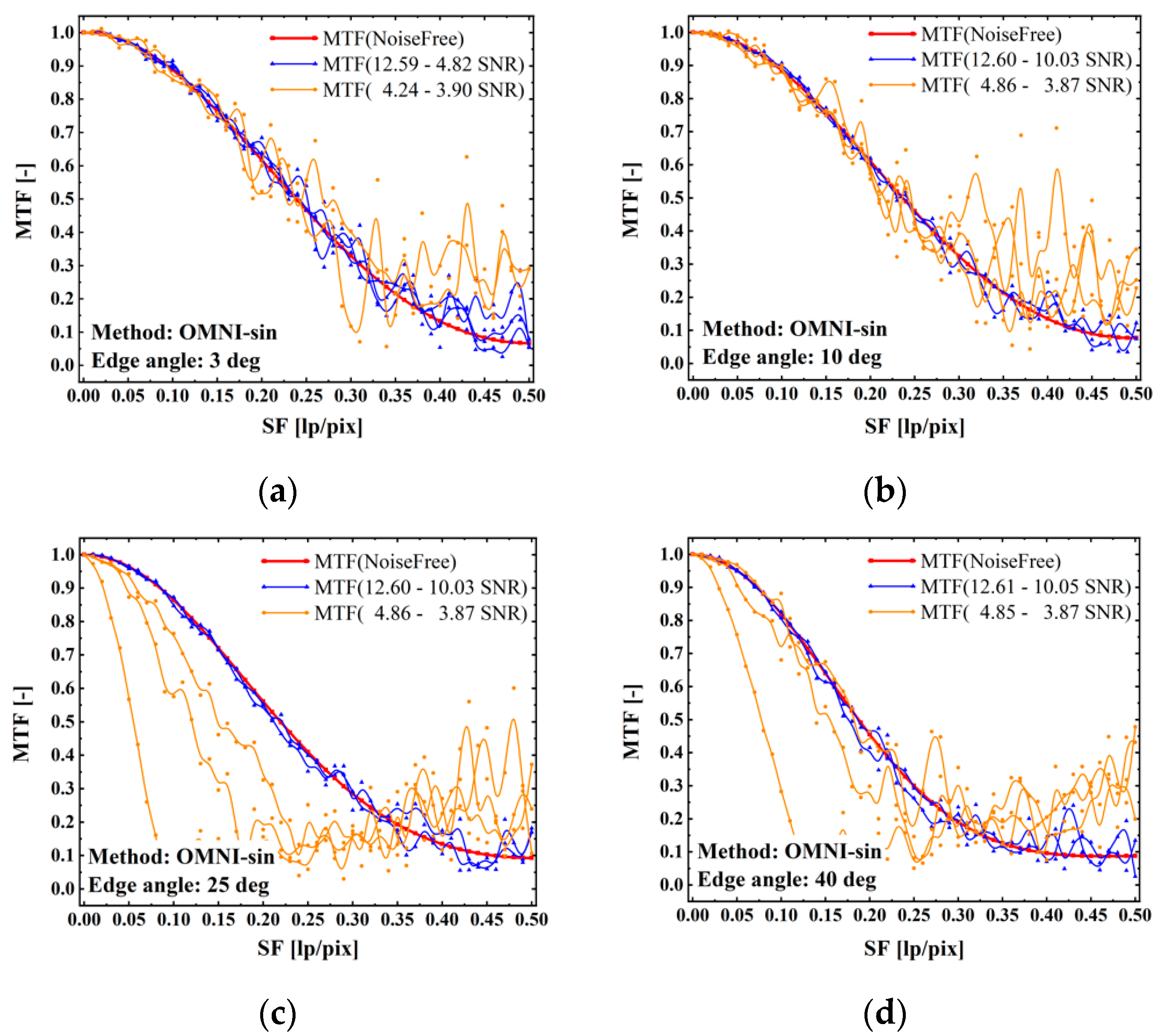
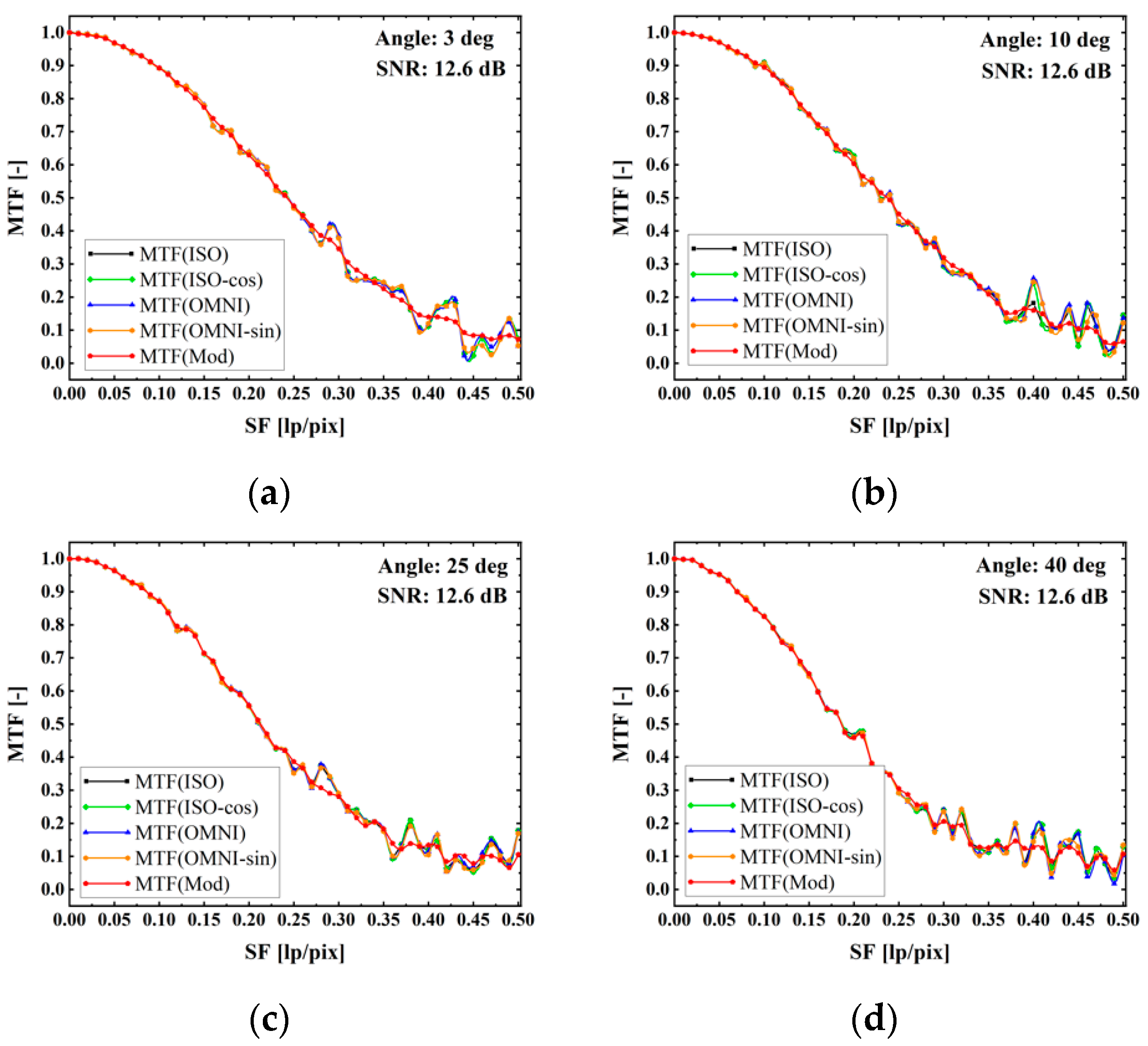
3.5. Random Noise
4. Practical Multidirectional MTF Measurement Method
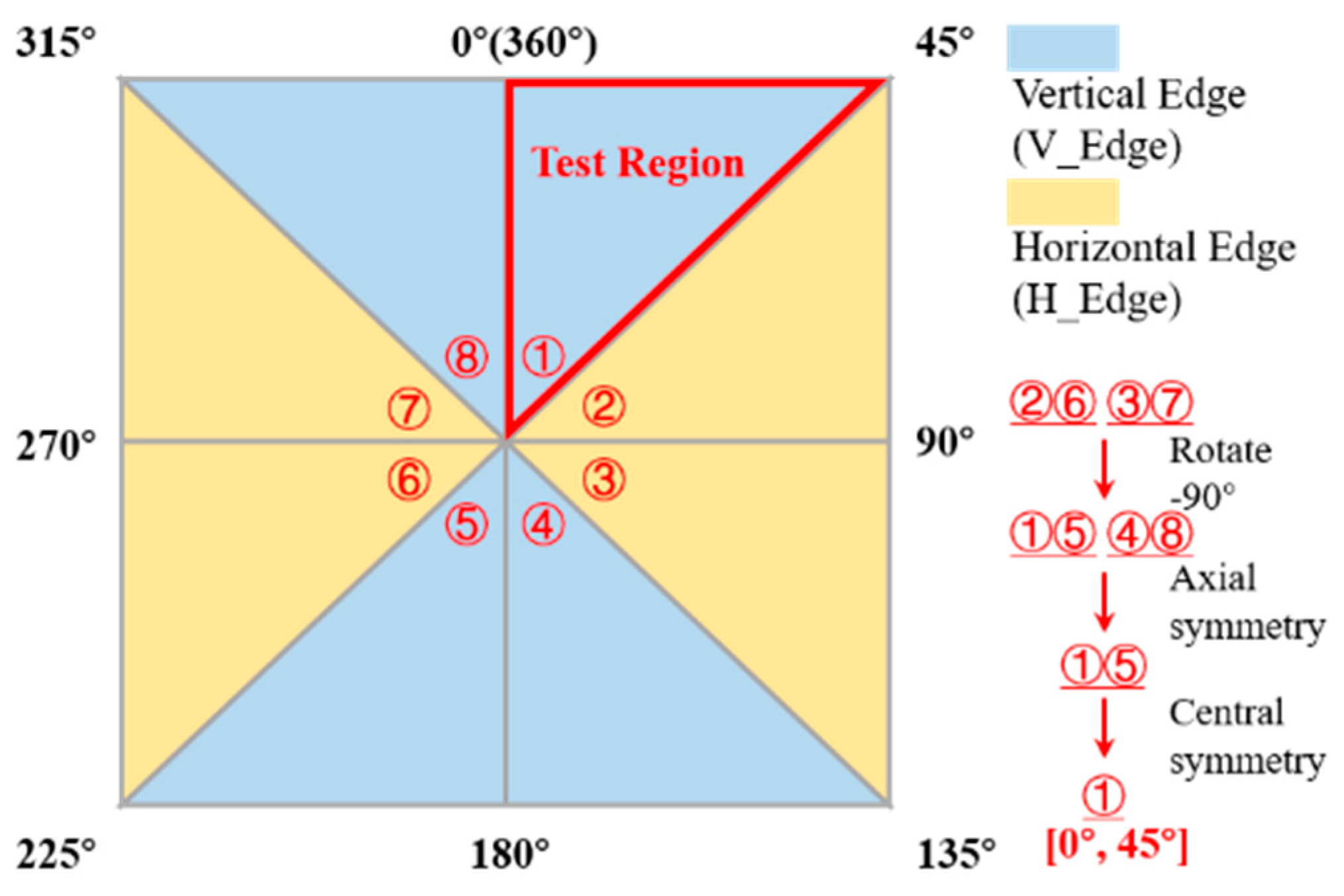
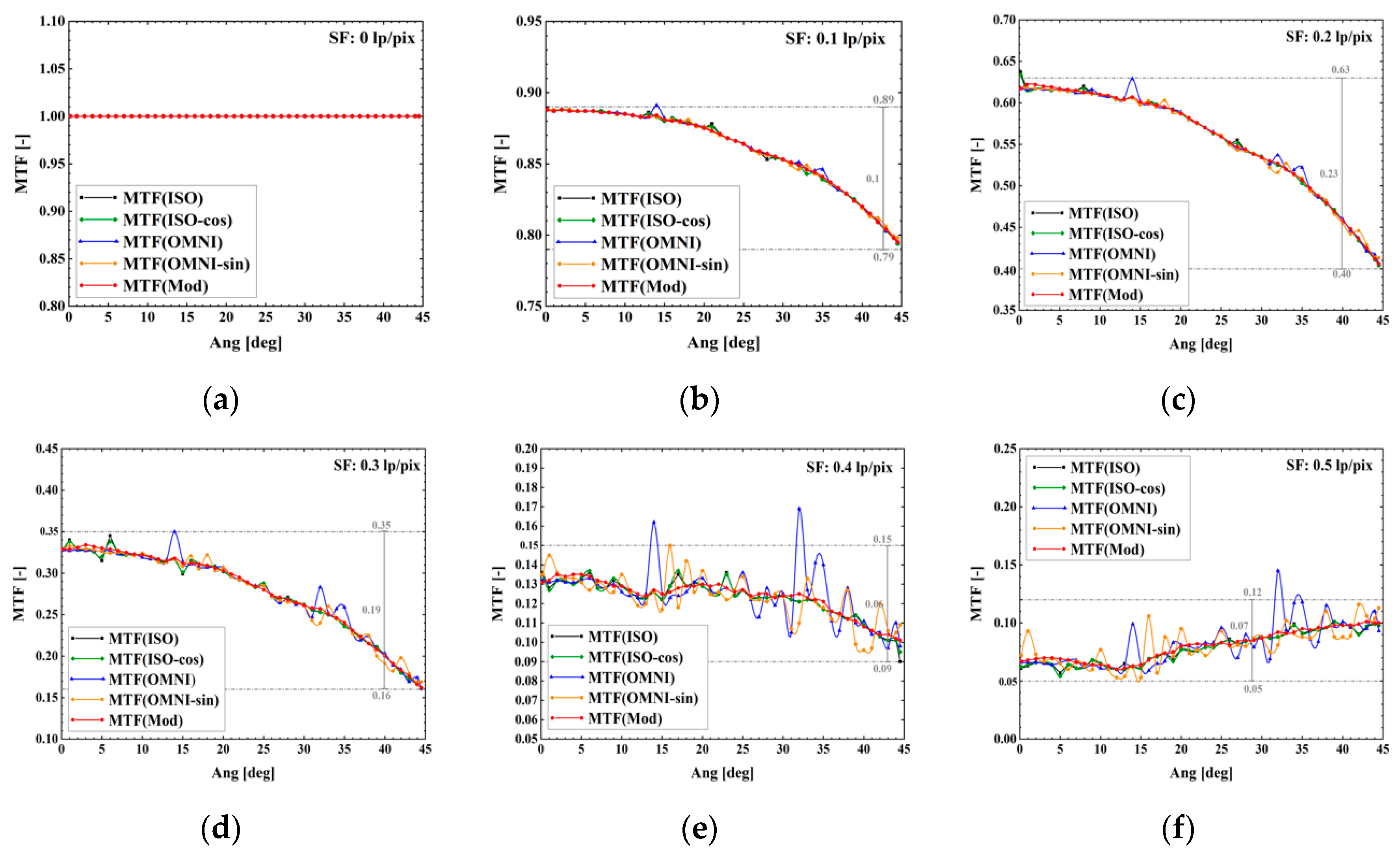
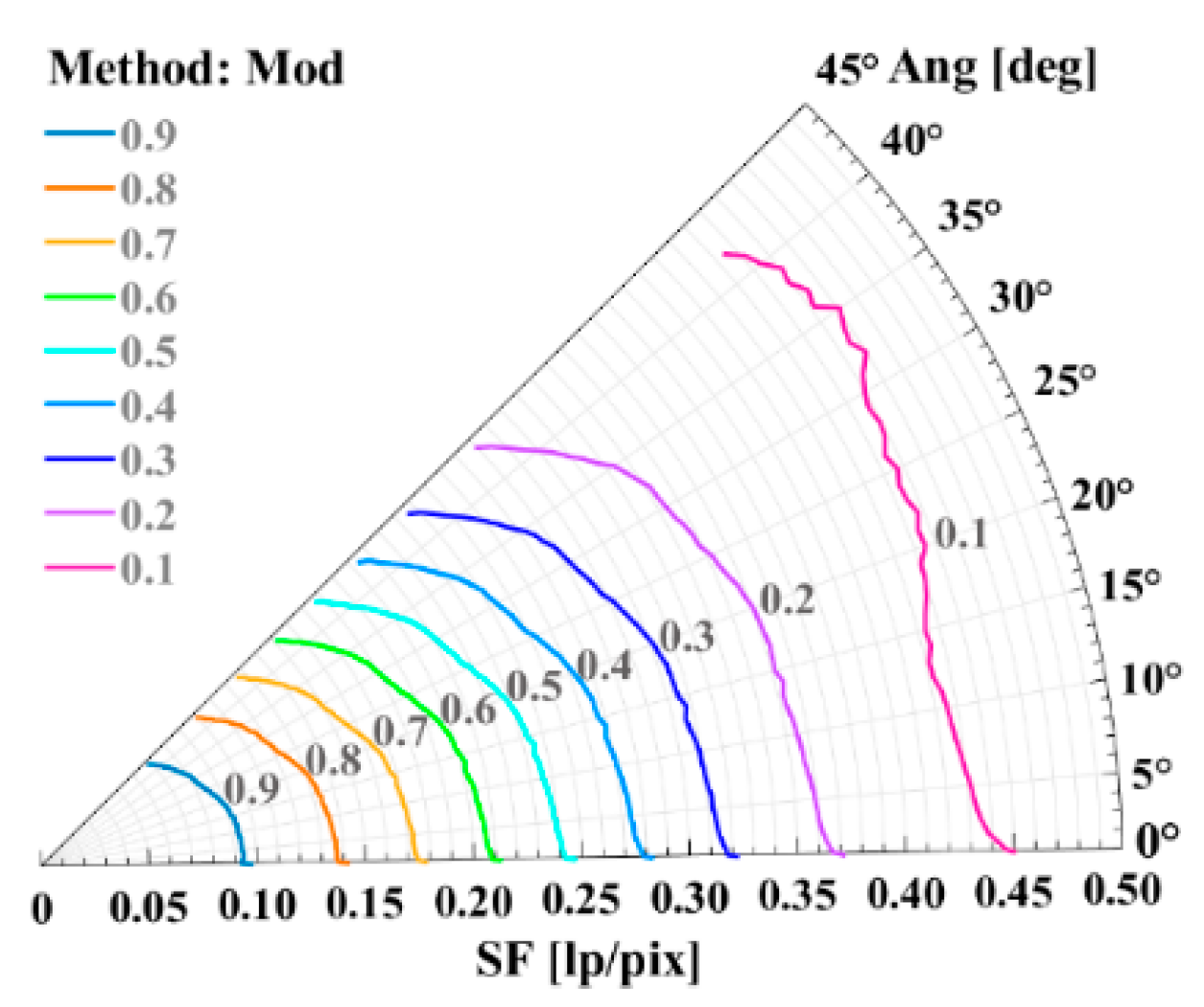
4.1. Rationality of Multidirectional MTF
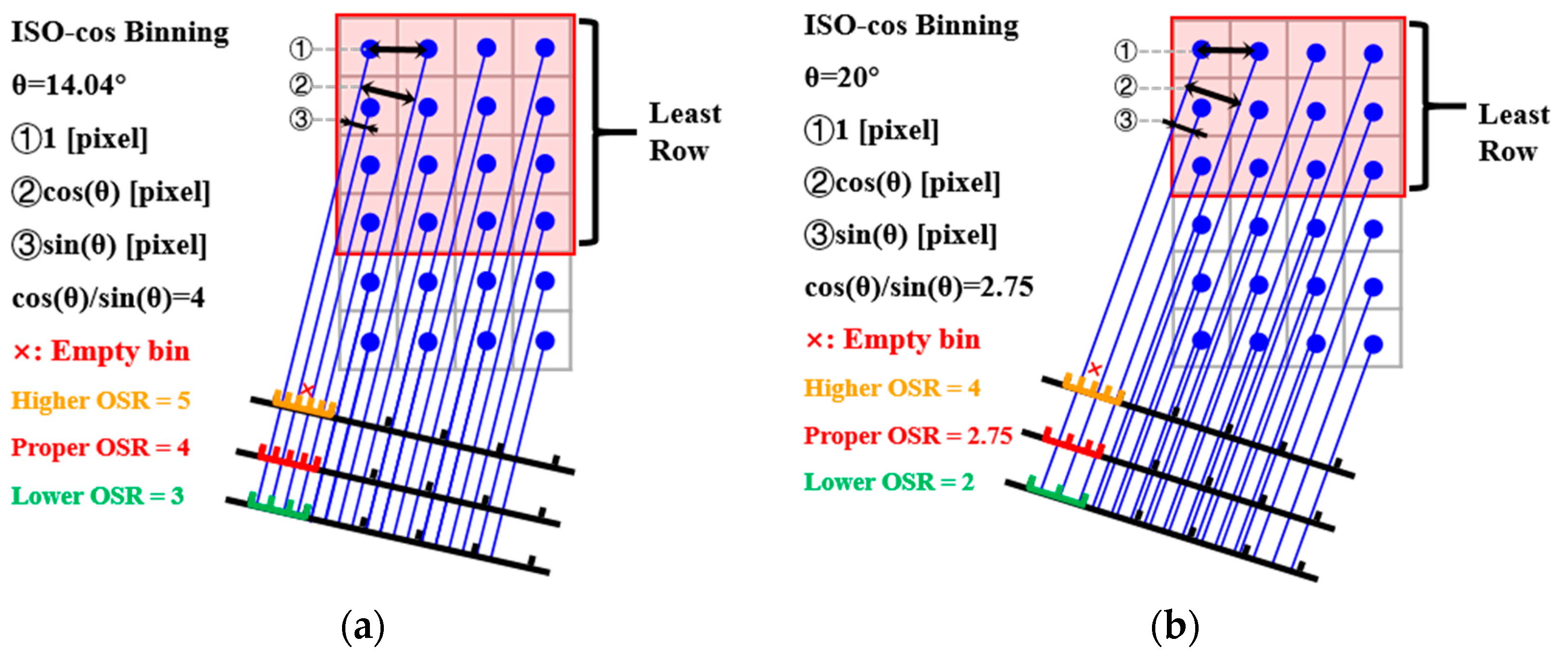
4.2. Modified Adaptive OSR Model
4.3. Multi-state MTF Measurement

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm 1 Automatic determination strategy of multi-ROI for edge image |
| Input: ①Edge image, ②Edge angle(θ), ③Number of edge image row(R). |
| Calculation: ①Least number of valid rows (Rmin = ceil(1/tan(θ))), |
| ②Maximal number of valid row area (Xmax-Rmin = floor(R/Rmin)). |
| where ROI Height is k·Full or g·Rmin (k∈(0,1], g∈Z+); |
| where ROI Position should be determined from Top, Middle or Bottom. |
| if Xmax-Rmin∈(0,3) |
| ROI-Num = 1→ROI1(Full, Middle) |
| elseif Xmax-Rmin∈[3,5) |
| ROI-Num = 4→ROI1(3·Rmin, Top), ROI2(3·Rmin, Middle), ROI3(3·Rmin, Bottom), |
| ROI4(Full, Middle). |
| elseif Xmax-Rmin∈[5,10) |
| ROI-Num = 8→ROI1(3·Rmin, Top), ROI2(3·Rmin, Bottom), ROI3(5·Rmin, Middle), |
| ROI4(5·Rmin, Top), ROI5(5·Rmin, Bottom), ROI6(0.5·Full, Top), |
| ROI7(0.5·Full, Bottom), ROI8(Full, Middle). |
| else Xmax-Rmin> 10 |
| ROI-Num = 10→ROI1(3·Rmin, Top), ROI2(5·Rmin, Bottom), ROI3(8·Rmin, Middle), |
| ROI4(10·Rmin, Middle), ROI5(0.5·Full, Top), ROI6(0.6·Full, Middle), |
| ROI7(0.7·Full, Bottom), ROI8(0.8·Full, Top), ROI9(0.9·Full, Bottom), |
| ROI10(Full, Middle). |
| end |
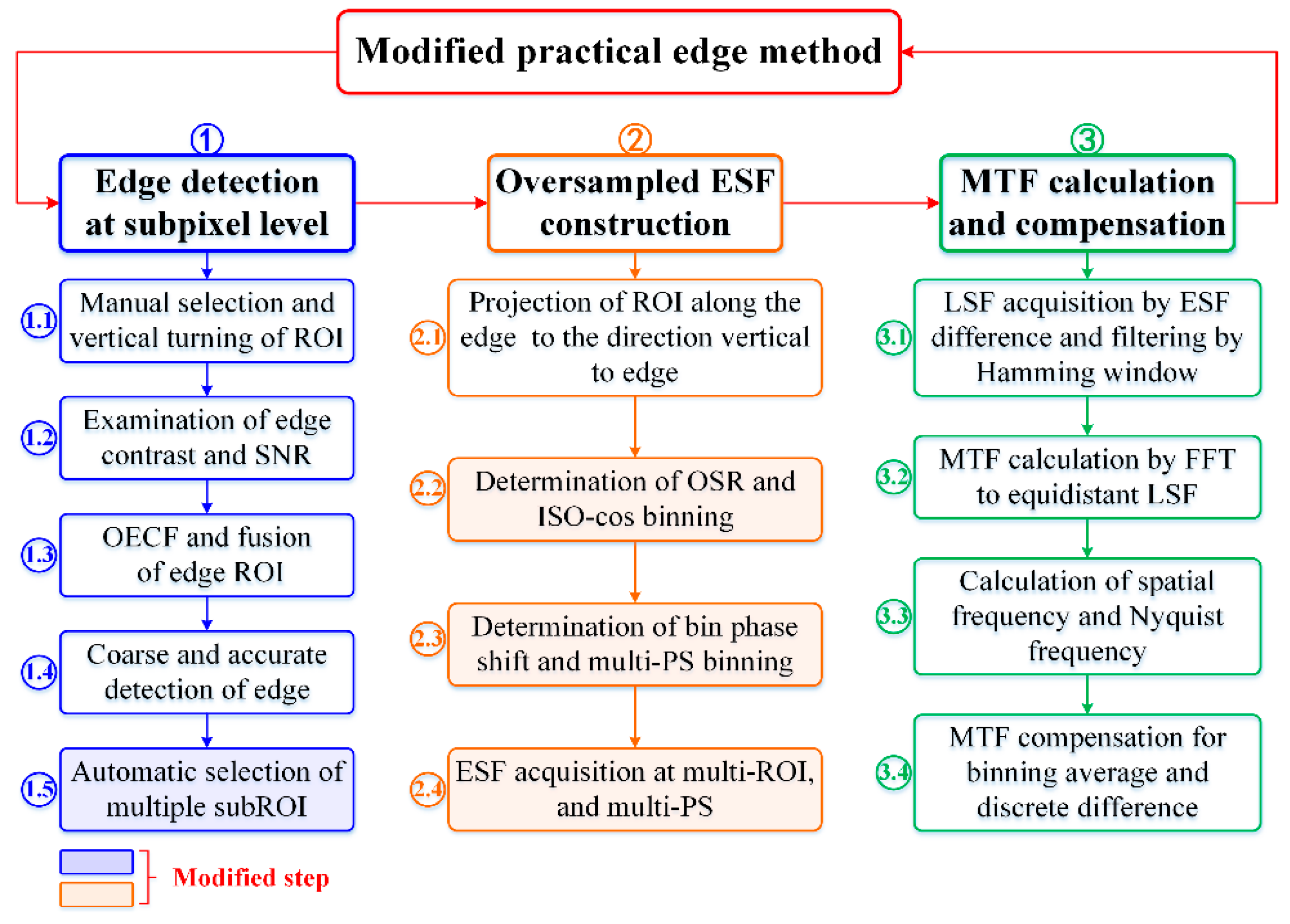
4.4. Modified Practical Edge Method
5. Comparative Experiments and Discussion
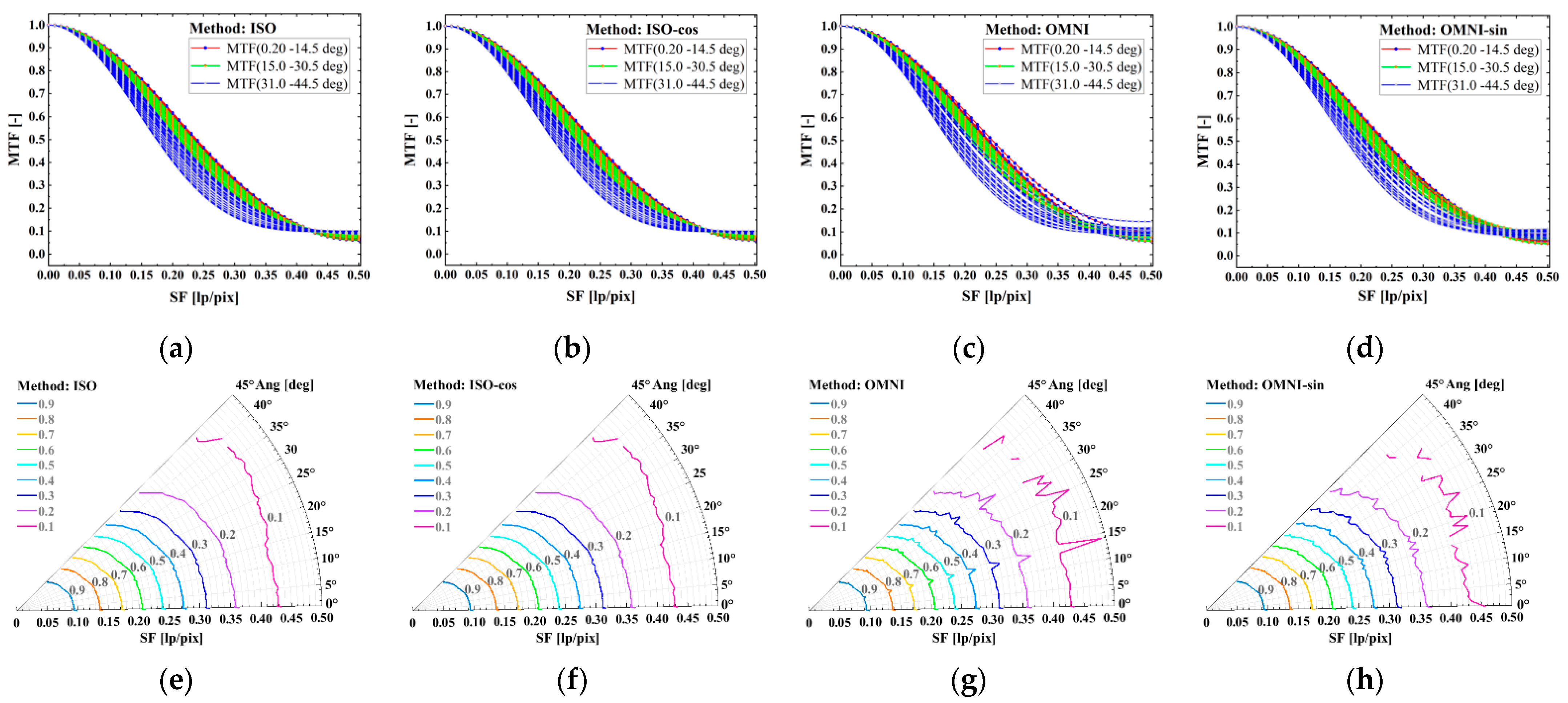
5.1. Simulation: Proposed Method vs. Other Methods
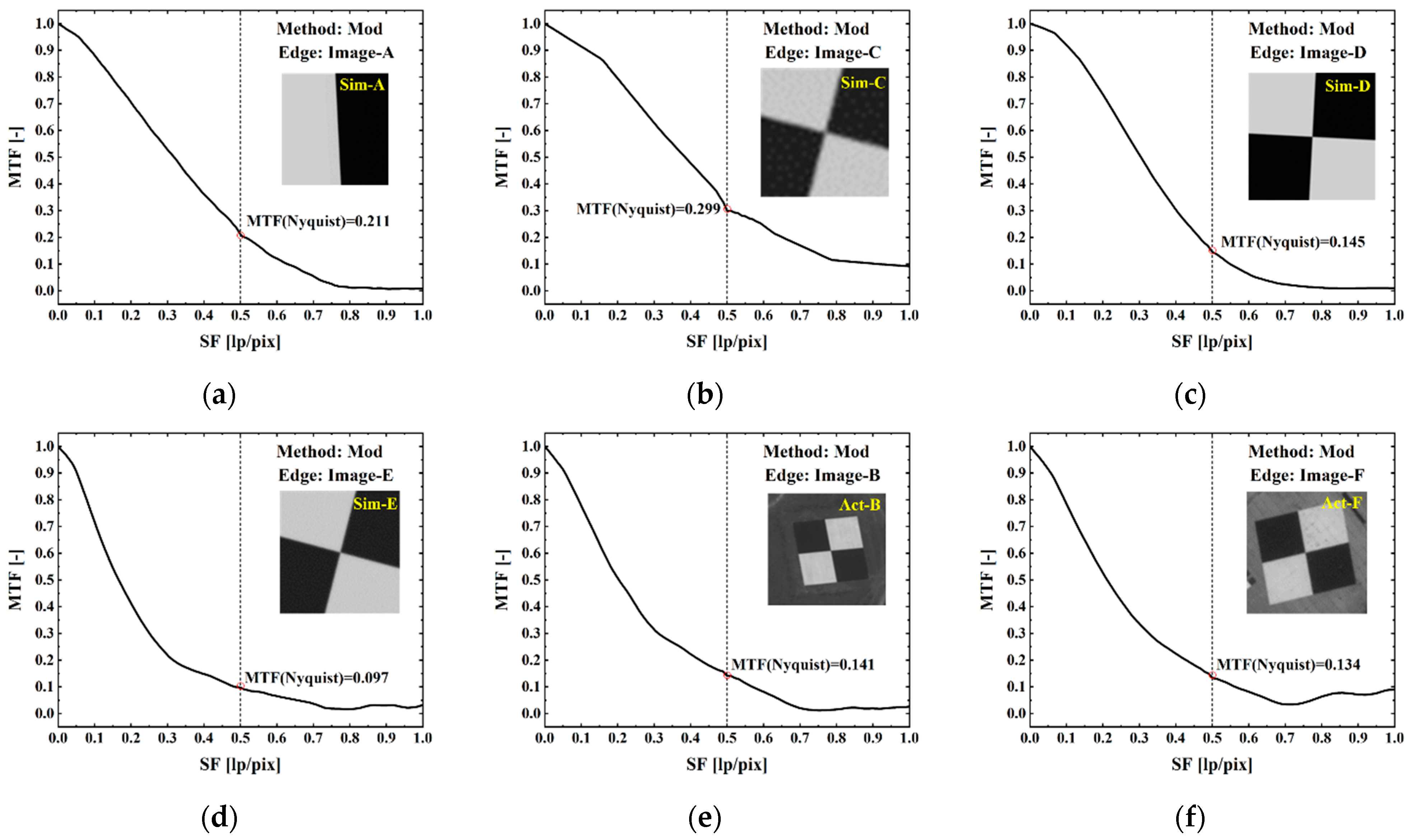
5.2. Experiment: Application to Reference Dataset
5.3. Discussion of Influencing Factors
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Viallefont-Robinet, F.; Helder, D.; Fraisse, R.; Newbury, A.; van den Bergh, F.; Lee, D.; Saunier, S. Comparison of MTF measurements using edge method: Towards reference data set. Opt. Express 2018, 26, 33625–33648. [Google Scholar] [CrossRef] [PubMed]
- Masaoka, K.; Yamashita, T.; Nishida, Y.; Sugawara, M. Modified slanted-edge method and multidirectional modulation transfer function estimation. Opt. Express 2014, 22, 6040–6046. [Google Scholar] [CrossRef] [PubMed]
- Viallefont-Robinet, F.; Leger, D. Improvement of the edge method for on-orbit MTF measurement. Opt. Express 2010, 18, 3531–3545. [Google Scholar] [CrossRef] [PubMed]
- ISO 12233:2017; Photography-Electronic Still Picture Imaging-Resolution and Spatial Frequency Responses, document ISO 12233:2017. Multiple. Distributed through American National Standards Institute (ANSI) : Washington, DC, USA.
- Duan, Y.X.; Xu, S.B.; Yuan, S.C.; Chen, Y.Q.; Li, H.G.; Da, Z.S.; Gao, L.M. Modified slanted-edge method for camera modulation transfer function measurement using nonuniform fast Fourier transform technique. Opt. Eng. 2018, 57, 014103. [Google Scholar] [CrossRef]
- Zhang, H.S.; Li, C.; Duan, Y.X. Modified slanted-edge method to measure the modulation transfer function of camera. Optik 2018, 157, 635–643. [Google Scholar] [CrossRef]
- Masaoka, K. Edge-based modulation transfer function measurement method using a variable oversampling ratio. Opt. Express 2021, 29, 37628–37638. [Google Scholar] [CrossRef] [PubMed]
- Li, T.C.; Feng, H.J.; Xu, Z.H. A new analytical edge spread function fitting model for modulation transfer function measurement. Chin. Opt. Lett. 2011, 9, 031101. [Google Scholar] [CrossRef]
- Xie, X.F.; Fan, H.D.; Wang, A.D.; Zou, N.Y.; Zhang, Y.C. Regularized slanted-edge method for measuring the modulation transfer function of imaging systems. Appl. Opt. 2018, 57, 6552–6558. [Google Scholar] [CrossRef] [PubMed]
- Li, X.B.; Jiang, X.G.; Zhou, C.J.; Gao, C.X.; Xi, X.H. An analysis of the knife-edge method for on-orbit MTF estimation of optical sensors. Int. J. Remote Sens. 2010, 31, 4995–5010. [Google Scholar] [CrossRef]
- Masaoka, K. Accuracy and Precision of Edge-Based Modulation Transfer Function Measurement for Sampled Imaging Systems. IEEE Access 2018, 6, 41079–41086. [Google Scholar] [CrossRef]
- Xie, X.F.; Fan, H.D.; Wang, H.Y.; Wang, Z.B.; Zou, N.Y. Error of the slanted edge method for measuring the modulation transfer function of imaging systems. Appl. Opt. 2018, 57, B83–B91. [Google Scholar] [CrossRef] [PubMed]
- Maruyama, S. Assessment of uncertainty depending on various conditions in modulation transfer function calculation using the edge method. J. Med. Phys. 2021, 46, 221–227. [Google Scholar] [PubMed]
- Masaoka, K. Real-time modulation transfer function measurement system. In Proceedings of the Proc. SPIE Conference on Ultra-High-Definition Imaging Systems II, San Francisco, CA, USA, 2–3 February 2019; Volume 10943, p. 1094309. [Google Scholar]
- Masaoka, K. Practical edge-based modulation transfer function measurement. Opt. Express 2019, 27, 1345–1352. [Google Scholar] [CrossRef] [PubMed]
- Masaoka, K. Line-Based Modulation Transfer Function Measurement of Pixelated Displays. IEEE Access 2020, 8, 196351–196362. [Google Scholar] [CrossRef]
- Zengilowski, G.R.; McMurtry, C.W.; Pipher, J.L.; Reilly, N.S.; Dorn, M.L.; Mainzer, A.K.; Wong, A.F.; Reinhart, L.; Newswander, T.; Luder, R. Modulation transfer function measurements of HgCdTe long wavelength infrared arrays for the Near-Earth Object Surveyor. J. Astron. Telesc. Instrum. Syst. 2022, 8, 23. [Google Scholar] [CrossRef]
- Wang, C.; Zhu, R.F. Optical satellite image MTF compensation for remote-sensing data production. Int. J. Comput. Appl. Technol. 2022, 68, 132–142. [Google Scholar] [CrossRef]
- Takeuchi, T.; Hayashi, N.; Asai, Y.; Kayaoka, Y.; Yoshida, K. Novel method for evaluating spatial resolution of magnetic resonance images. Phys. Eng. Sci. Med. 2022, 45, 487–496. [Google Scholar] [CrossRef] [PubMed]
- Kakinuma, R.; Kawagishi, N.; Yasugi, M.; Yamamoto, H. Influence of incident angle, anisotropy, and floating distance on aerial imaging resolution. OSA Continuum. 2021, 4, 865–878. [Google Scholar] [CrossRef]
- Fang, Y.-C.; Tsay, H.-L. A study of multi-angles knife-edge method applied to digital modulation transfer function measurement. Microsyst. Technol. 2021, 27, 1429–1437. [Google Scholar] [CrossRef]
- Roland, J.K.M. A study of slanted-edge MTF stability and repeatability. In Proceedings of the Proc. SPIE Conference on Image Quality and System Performance XII, San Francisco, CA, USA, 10–12 February 2015; Volume 9396, p. 93960L. [Google Scholar]
- Fang, Y.C.; Tzeng, Y.F.; Wu, K.Y.; Tsay, H.L.; Lin, P.M. Measurement and analysis of modulation transfer function of digital image sensors. Microsyst. Technol. 2022, 28, 137–142. [Google Scholar] [CrossRef]





















| Method | ISO 12233 | ISO-cos | OMNI | OMNI-sin | |
|---|---|---|---|---|---|
| Process | |||||
| Project to | ∥ X-axis | ⊥ Edge | ⊥ Edge | ⊥ Edge | |
| OSR | 4 | 4 | 4 | Variable OSR [7] | |
| Bin Width (pixel) | 1/4 | cos(θ)/4 | 1/4 | 1/(Variable OSR) | |
| Noise Type | Gaussian Noise (Variance) | Uniform Noise (Threshold) | Exponential Noise (Mean) | Speckle Noise (Variance) | SNR (dB) | |
|---|---|---|---|---|---|---|
| Noise Level | ||||||
| 00 (noise free) | 0.000 | 0 | 0 | 0.000 | ∞ | |
| 01 | 0.001 | 1 | 1 | 0.001 | 12.6 | |
| 02 | 0.005 | 2 | 2 | 0.005 | 10.0 | |
| 03 | 0.010 | 3 | 3 | 0.010 | 4.8 | |
| 04 | 0.015 | 4 | 4 | 0.015 | 4.2 | |
| 05 (noise max) | 0.020 | 5 | 5 | 0.020 | 3.9 | |
| MTF | Mod MTF at Nyquist Frequency | Reference [1] MTF Average at Nyquist Frequency | |
|---|---|---|---|
| Edge Image | |||
| Simulated edge image A | 0.221 | 0.20~0.21 | |
| Simulated edge image C | 0.299 | 0.29~0.30 | |
| Simulated edge image D | 0.145 | 0.12~0.14 | |
| Simulated edge image E | 0.097 | 0.08~0.10 | |
| Actual edge image B | 0.141 | 0.13~0.14 | |
| Actual edge image F | 0.134 | 0.12~0.13 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Xu, W.; Piao, Y.; Yue, W. Analysis of Edge Method Accuracy and Practical Multidirectional Modulation Transfer Function Measurement. Appl. Sci. 2022, 12, 12748. https://doi.org/10.3390/app122412748
Wu Y, Xu W, Piao Y, Yue W. Analysis of Edge Method Accuracy and Practical Multidirectional Modulation Transfer Function Measurement. Applied Sciences. 2022; 12(24):12748. https://doi.org/10.3390/app122412748
Chicago/Turabian StyleWu, Yongjie, Wei Xu, Yongjie Piao, and Wei Yue. 2022. "Analysis of Edge Method Accuracy and Practical Multidirectional Modulation Transfer Function Measurement" Applied Sciences 12, no. 24: 12748. https://doi.org/10.3390/app122412748