
Design of a Highly Adaptable Advance Support for a Deep, Fully Mechanized Roadway and Analysis of Its Support Performance

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Characteristics of the Structure of HAAS for Deep, Fully Mechanized Roadways
2.1. Structure of the Support
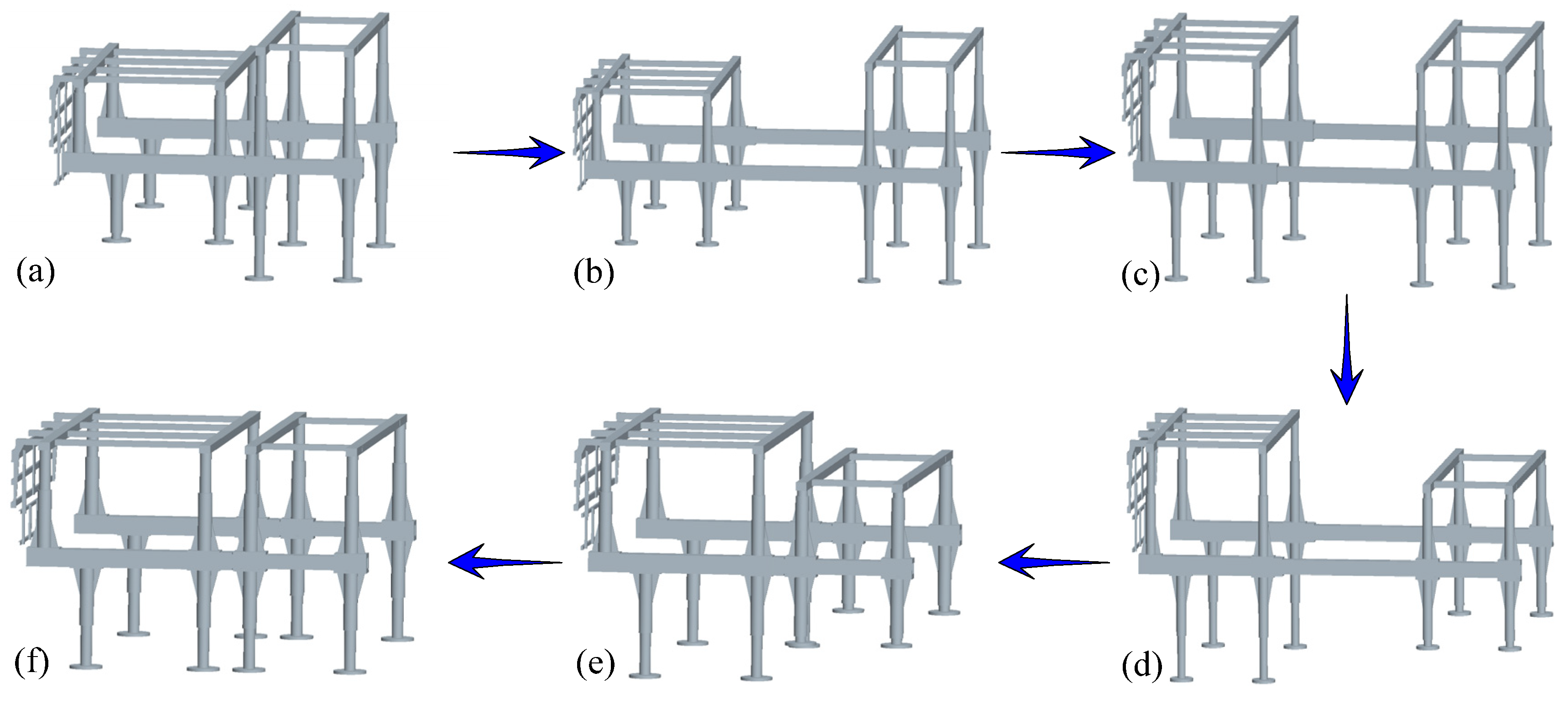
2.2. Working Principle of the Support
- (1)
- After the roadheader finishes a cutting, under the control of the hydraulic system, the column cylinder of the front support contracts. In this way, the lower column rises, while the upper column falls. Ultimately, the column of the front support separates from the roof and the floor (Figure 2a).
- (2)
- Then, the column cylinder of the front support maintains the contraction state. During this process, the advance support underpinned by the rear support pushes the front one forward to the target position with the aid of the hydraulic system (Figure 2b).
- (3)
- While the front support moves to the target position, its column cylinder extends through the hydraulic system. Subsequently, the lower column falls to the floor, and the upper column rises to the roof, thus completing the support for the roof (Figure 2c).
- (4)
- The column cylinder of the rear support contracts under the control of the hydraulic system. Thus, the lower column rises, while the upper column falls. Ultimately, the column of the rear support separates from the roof and the floor (Figure 2d).
- (5)
- The column cylinder of the rear support maintains the contraction state. Meanwhile, through the hydraulic system, the advance support underpinned by the front support pushes the rear one forward to the position nearest to the front support (Figure 2e).
- (6)
- The column cylinder of the rear support extends with the assistance of the hydraulic system. By doing so, the lower column of the rear support falls to the floor, and its upper column rises to the roof. As a result, a whole movement process of the advance support is completed (Figure 2f).
2.3. Technical Characteristics of the Support
- (1)
- Novel structural design
- (2)
- High adaptability
- (3)
- High level of safety and reliability
- (4)
- High excavation efficiency
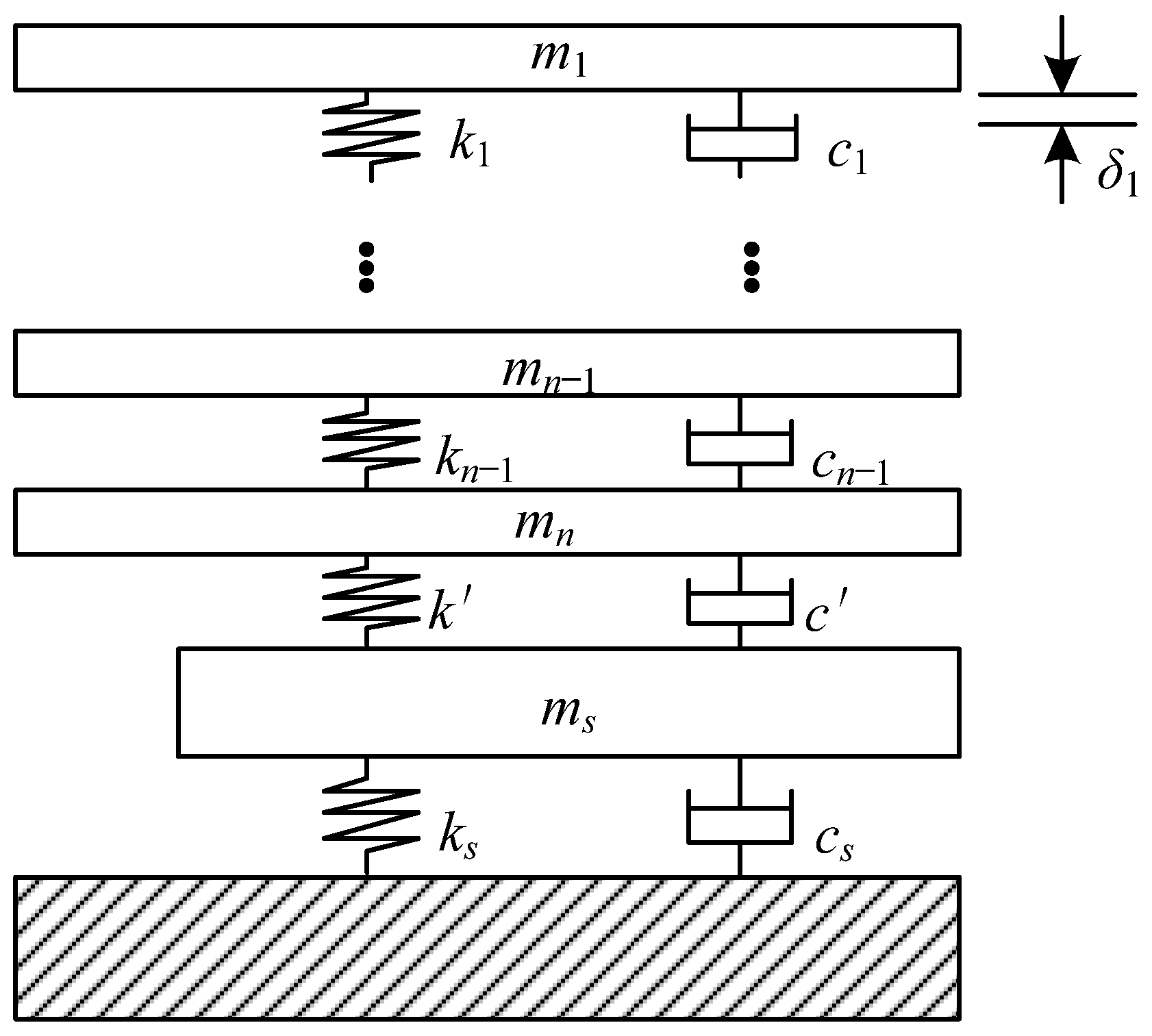
3. Coupling Dynamic Model of the Advance Support and the Roof
- is the acceleration vector of rock blocks;
- is the velocity vector of rock blocks;
- and are the displacement vector of rock blocks and viscoelastic fixing between rock blocks, respectively. , ;
- and is the acceleration of gravity.
4. Stress Analysis on the HAAS for Deep, Fully Mechanized Roadways
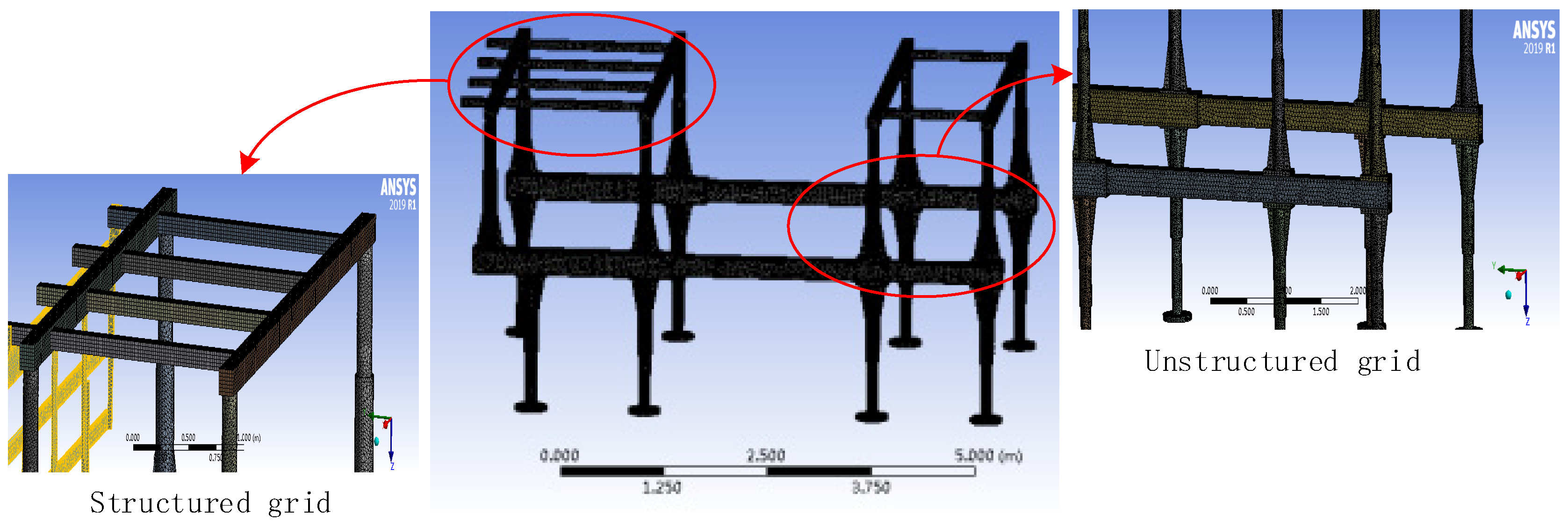
4.1. Model Establishment
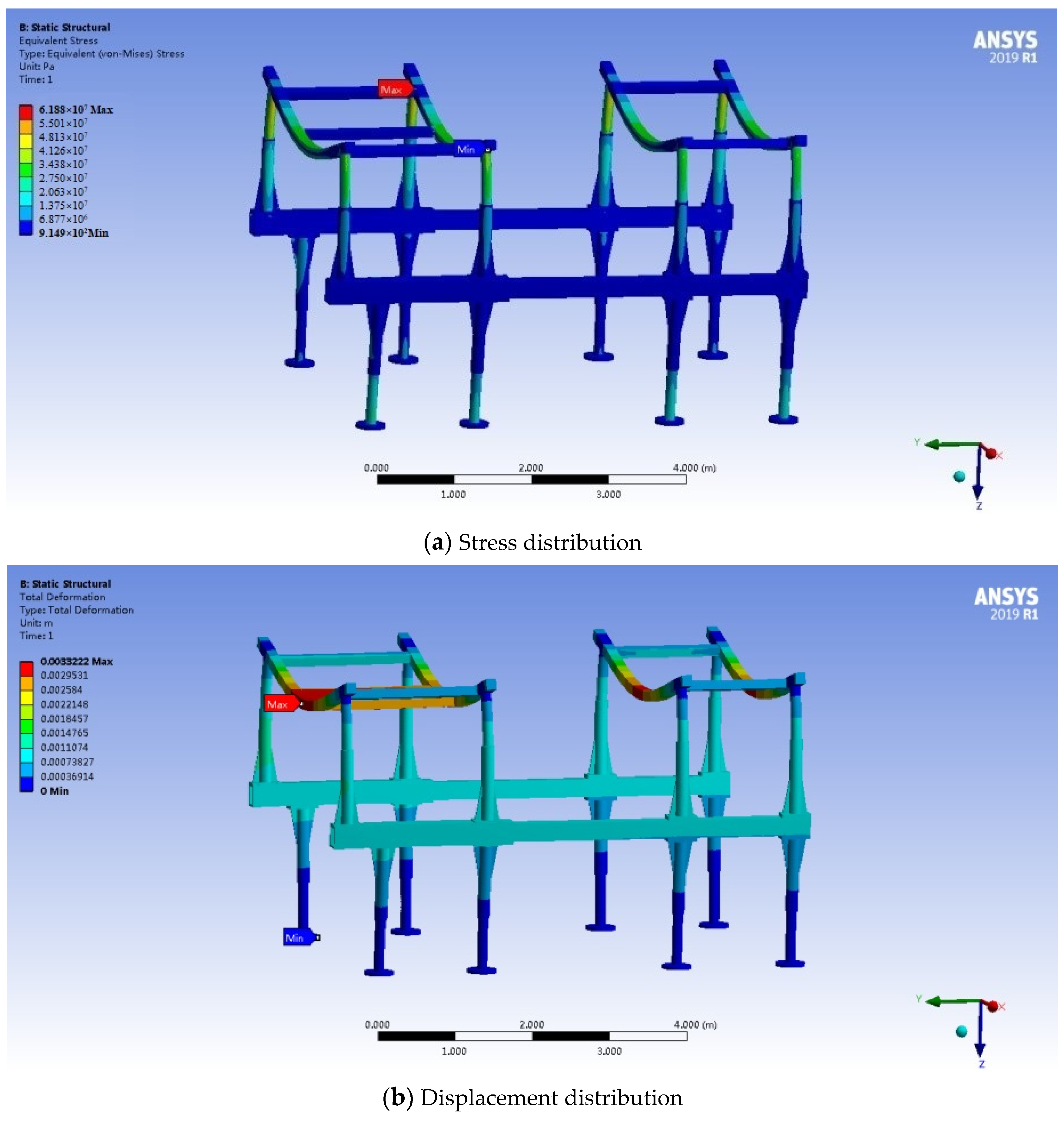
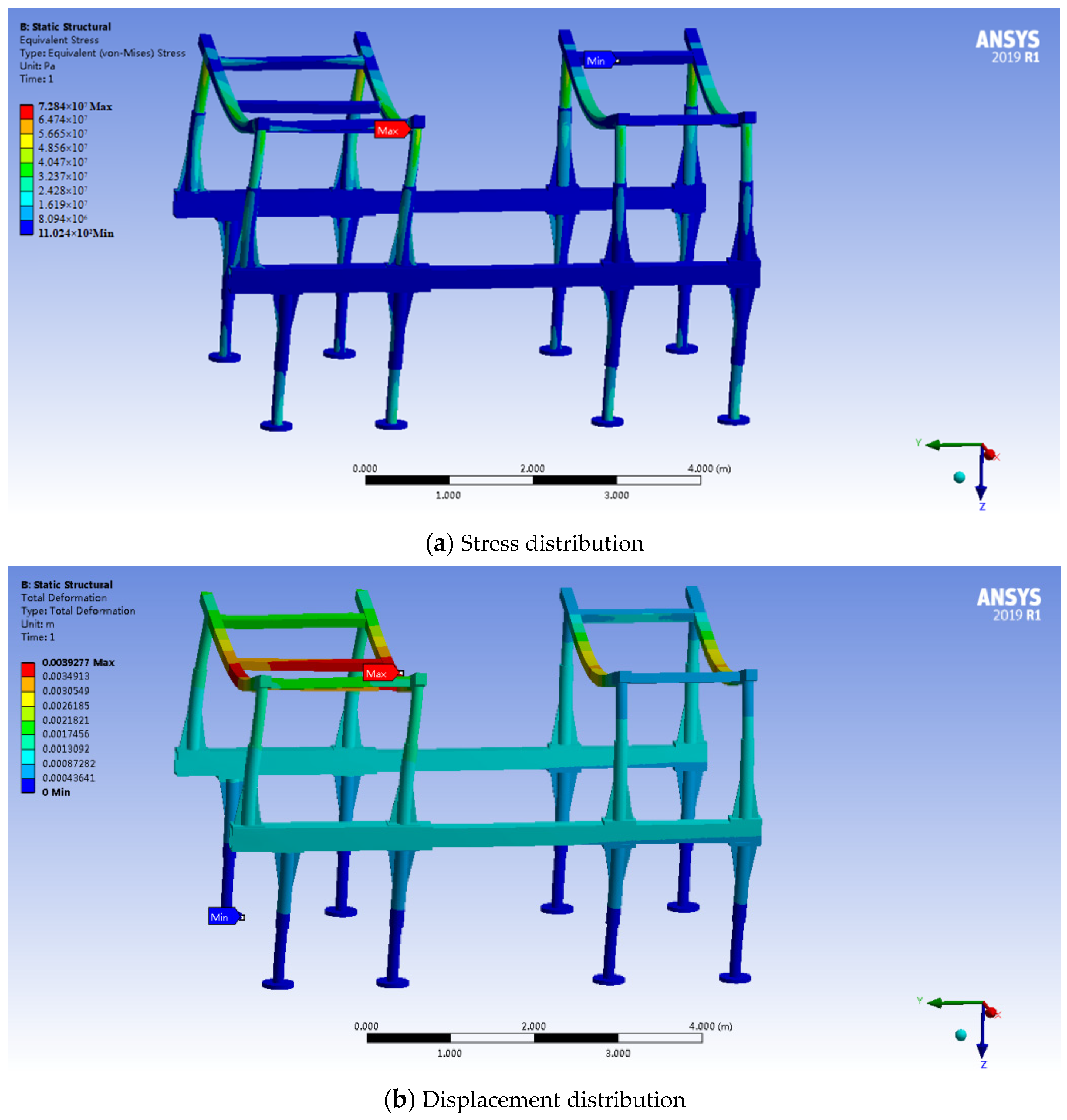
4.2. Stress Analysis on the Advance Support under the Normal External Loads
4.3. Stress Analysis on the Advance Support under the Lateral External-Force Interference
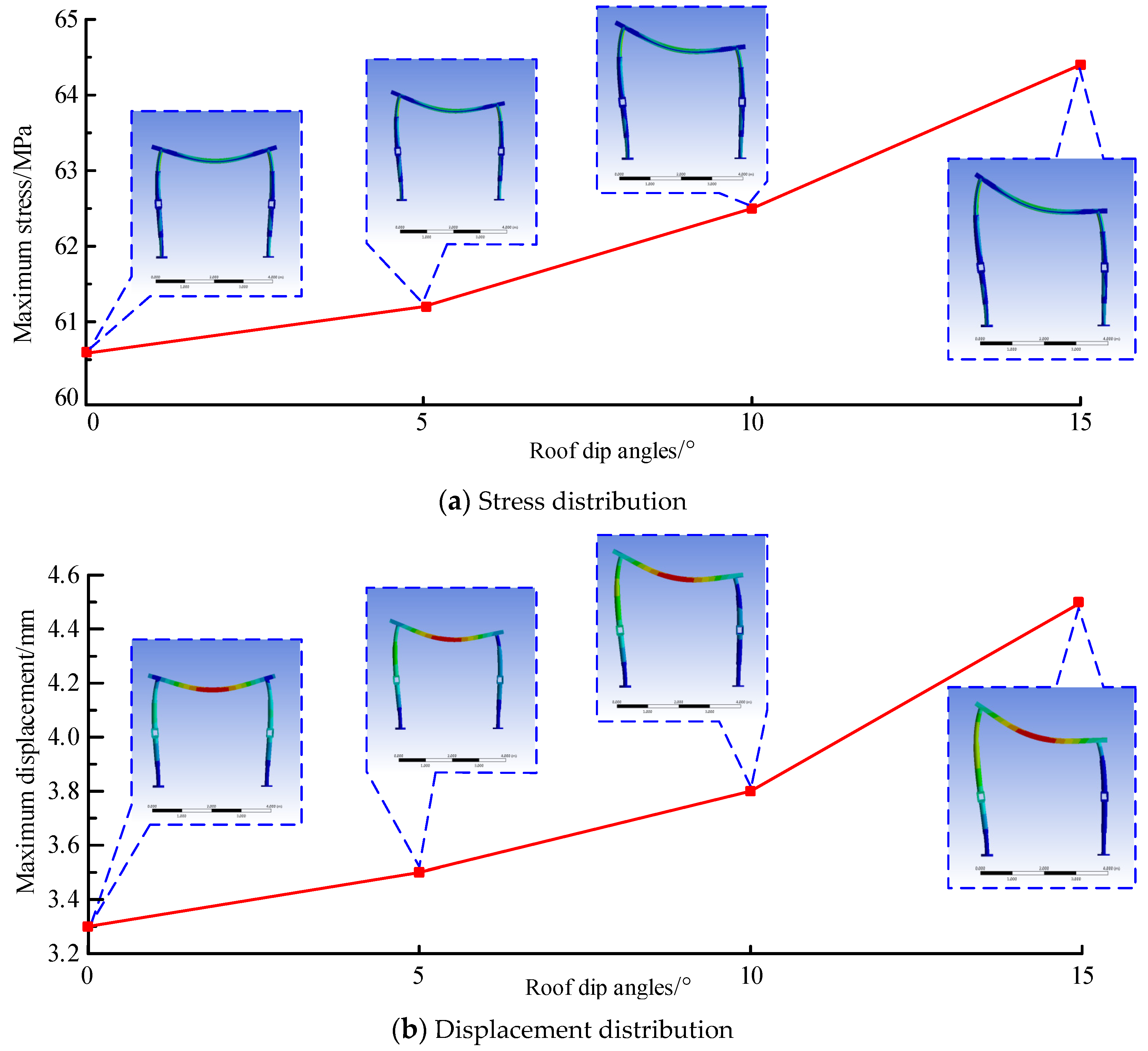
4.4. Stress Analysis on the Advance Support under Different Roof-Dip Angles
5. On-Site-Application Effect
- (1)
- Success in active support: Through the hydraulic system, the advance support successfully provides active support to the roof. The hydraulic support for excavation adopts the frame structure. Additionally, the overall structure of the support bears relatively large roof pressure, with high support strength and effective control of complex surrounding rocks.
- (2)
- Wide coverage of the roof support: The hydraulic support delivers effective support to the roof within 6 m of the roadway head, leaving abundant safe space for operators in the roadway head.
- (3)
- Success in remote control: The operators stand under the permanent support at the back of the advance support so that they can operate the hydraulic system away from the roadway head. In this way, they have no need to approach the roadway head or receive safety threats from the roof, thereby achieving intrinsic safety.
- (4)
- High adaptability of the support: Since the support is well-adapted to changes in the roof-dip angles and roadway slopes, it can be widely used in various roadways with complex conditions.
- (5)
- Improvement of the working cycle: Compared with traditional temporary supports, the hydraulic support with a long step distance extends the working cycle from 1.6 m to 3.2 m, which greatly boosts the single heading level of roadway excavation.
- (6)
- Improvement of support efficiency: The support with low labor intensity is run by only one person. It performs continuous operations of excavation and support. By using support for an extensive cover, the parallel operations with two anchor-drilling machines are now implemented by four machines, greatly improving the efficiency of roadway support.
6. Conclusions
- (1)
- The structure of HAAS for deep, fully mechanized roadways was preliminarily designed. The support arranged the movement mechanism in the middle of the column so as to achieve rapid and flexible movement. Simultaneously, the telescopic support column was hinged with the roof beam, adjusting to the floor undulation of the roadway and the change in the roof-dip angle.
- (2)
- The finite element model of HAAS for deep, fully mechanized roadway was established and the stress and displacement distribution of the advance support under different working conditions were obtained by calculation. The analysis results showed that the support designed for various working conditions bears the pressure from surrounding rocks without being destroyed, which meets the requirements of fully mechanized roadway support. In addition, the relatively great stress and deformation are generally located at the roof beam and column of the support. Factors such as lateral external force and roof-dip angle have a great influence on the support stability.
- (3)
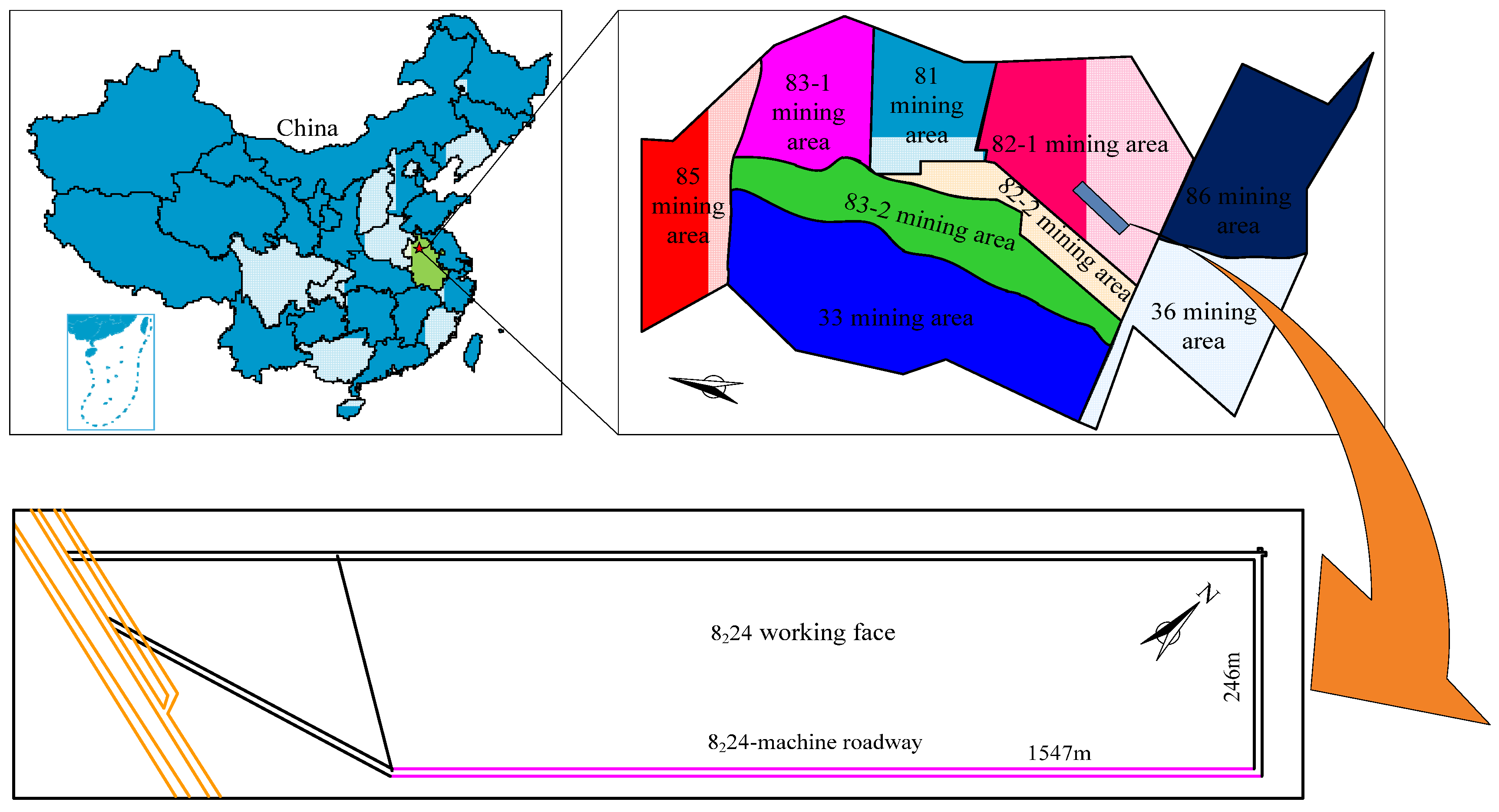
- The on-site application of the 8224-machine roadway in the XT Coal Mine revealed that the HAAS for deep, fully mechanized roadways effectively controls the roof stability. The support also eliminated the difficulty in support movement and enhanced the excavation efficiency of the fully mechanized roadway, saving the costs of manpower and material resources. In addition to notable economic benefits, it also boasts remarkable social benefits, as it improves the working environment of the working face, reduces the labor intensity of workers and resource waste, and achieves the technical progress of intelligent mining in coal mines.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, Q.; Jiang, Z.; Jiang, B.; Gao, H.; Huang, Y.; Zhang, P. Research on an Automatic Roadway Formation Method in Deep Mining Areas by Roof Cutting with High-strength Bolt-grouting. Int. J. Rock Mech. Min. Sci. 2020, 128, 104264. [Google Scholar] [CrossRef]
- Ma, P.; Qian, D.; Zhang, N.; Shimada, H.; Pan, D.; Huang, K. Roof Application of Bolter Miner Rapid Excavation Technology in Deep Underground Roadway in Inner Mongolia: A Case Study. Sustainability 2020, 12, 2588. [Google Scholar] [CrossRef] [Green Version]
- Tang, B.; Yeboah, M.; Cheng, H.; Tang, Y.; Yao, Z.; Wang, C.; Rong, C.; Wang, Z.; Liu, Q. Numerical Study and Field Performance of Rockbolt Support Schemes in Tbm-excavated Coal Mine Roadways: A Case Study. Tunn. Undergr. Space Technol. 2021, 115, 104053. [Google Scholar] [CrossRef]
- Chen, H.; Chen, H.; Xu, Y.; Zhang, D.; Ma, Y.; Mao, J. Research on Attitude Monitoring Method of Advanced Hydraulic Support Based on Multi-sensor Fusion. Measurement 2021, 187, 110341. [Google Scholar] [CrossRef]
- Liu, H.; Jiang, Z.; Chen, W.; Chen, F.; Ma, F.; Li, D.; Liu, Z.; Gao, H. A Simulation Experimental Study on the Advance Support Mechanism of a Roadway Used with the Longwall Coal Mining Method. Energies 2022, 15, 1366. [Google Scholar] [CrossRef]
- Zhang, K.; Li, Y.; Feng, L.; Meng, X.; Zhong, D.; Huang, L. Roof Deformation Characteristics and Experimental Verification of Advanced Coupling Support System Supporting Roadway. Energy Sci. Eng. 2022, 10, 2397–2419. [Google Scholar] [CrossRef]
- Wang, F.; Duan, C.; Tu, S.; Liang, N.; Bai, Q. Hydraulic Support Crushed Mechanism for the Shallow Seam Mining Face Under the Roadway Pillars of Room Mining Goaf. Int. J. Min. Sci. Technol. 2017, 27, 853–860. [Google Scholar] [CrossRef]
- Zhang, X.; Gong, P.; Wang, K.; Li, J.; Jiang, Y. Characteristic and Mechanism of Roof Fracture Ahead of the Face in an LTCC Panel When Passing an Abandoned Roadway: A Case Study from the Shenghua Coal Mine, China. Rock Mech. Rock Eng. 2019, 52, 2775–2788. [Google Scholar] [CrossRef]
- Yang, X.; Huang, R.; Yang, G.; Wang, Y.; Cao, J.; Liu, J.; He, M. Validation Study of No-pillar Mining Method Without Advance Tunneling: A Case Study of a Mine in China. Energy Sci. Eng. 2021, 9, 1761–1772. [Google Scholar] [CrossRef]
- Ge, X.; Xie, J.; Wang, X.; Liu, Y.; Shi, H. A Virtual Adjustment Method and Experimental Study of the Support Attitude of Hydraulic Support Groups in Propulsion State. Measurement 2020, 158, 107743. [Google Scholar] [CrossRef]
- Feng, X.; Ding, Z.; Hu, Q.; Zhao, X.; Ali, M.; Banquando, J.T. Orthogonal Numerical Analysis of Deformation and Failure Characteristics of Deep Roadway in Coal Mines: A Case Study. Minerals 2022, 12, 185. [Google Scholar] [CrossRef]
- Zeng, Q.; Li, Y.; Yang, Y. Dynamic Analysis of Hydraulic Support with Single Clearance. Stroj. Vestn. J. Mech. Eng. 2021, 67, 53–66. [Google Scholar] [CrossRef]
- Liang, M.; Fang, X.; Li, S.; Wu, G.; Ma, M.; Zhang, Y. A Fiber Bragg Grating Tilt Sensor for Posture Monitoring of Hydraulic Supports in Coal Mine Working Face. Measurement 2019, 138, 305–313. [Google Scholar] [CrossRef]
- Li, T.; Wang, J.; Zhang, K.; Zhang, C. Mechanical Analysis of the Structure of Longwall Mining Hydraulic Support. Sci. Prog. 2021, 103, 0036850420936479. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, H.; Gao, K.; Xu, W.; Zeng, Q. New Method and Experiment for Detecting Relative Position and Posture of the Hydraulic Support. IEEE Access 2019, 7, 181842–181854. [Google Scholar] [CrossRef]
- Xie, Y.; Zeng, Q.; Jiang, K.; Meng, Z.; Li, Q.; Zhang, J. Investigation of Dynamic Behaviour of Four-leg Hydraulic Support under Double-Impact Load. Stroj. Vestn. J. Mech. Eng. 2022, 68, 385–394. [Google Scholar] [CrossRef]
- Guo, C.; Mao, J. Anti-impact Load Characteristics of Two-stage Safety Valve for Hydraulic Support. Ain Shams Eng. J. 2022, 13, 101738. [Google Scholar] [CrossRef]
- Hao, Y.; Wu, Y.; Chen, L.; Teng, Y. An Innovative Yielding Prop with High Stable Load Capacity and Long Shrinkage Distance in Coal Mine. Mech. Adv. Mater. Struct. 2019, 26, 1568–1579. [Google Scholar] [CrossRef]
- Yu, Y.; Lu, J.; Pan, Y.; Zhao, X.; Chen, D. Research and Practice on Filling Technology of Fully Mechanized Coal Mining Face through Trend Abandoned Roadway. Sustainability 2021, 13, 9920. [Google Scholar] [CrossRef]
- Juárez-Ferreras, R.; González-Nicieza, C.; Menéndez-Díaz, A.; Álvarez-Vigil, A.E.; Álvarez-Fernández, M.I. Forensic Analysis of Hydraulic Props in Longwall Workings. Eng. Fail. Anal. 2009, 16, 2357–2370. [Google Scholar] [CrossRef]
- Xie, S.; Wu, X.; Chen, D.; Sun, Y.; Wang, E.; Wu, X.; Duan, X.; Jiang, Z.; Qi, P.; Shi, S. Failure Mechanism and Control Technology of Thick and Soft Coal Fully Mechanized Caving Roadway under Double Gobs in Close Coal Seams. Shock Vib. 2020, 2020, 8846014. [Google Scholar] [CrossRef]
- Wang, X.; Yang, Z.; Feng, J.; Liu, H. Stress Analysis and Stability Analysis on Doubly-telescopic Prop of Hydraulic Support. Eng. Fail. Anal. 2013, 3, 274–282. [Google Scholar] [CrossRef]
- Zhang, S.; Fan, G.; Chai, L.; Li, Q.; Chen, M.; Luo, T.; Ren, S. Disaster Control of Roof Falling in Deep Coal Mine Roadway Subjected to High Abutment Pressure. Geofluids 2021, 2021, 8875249. [Google Scholar] [CrossRef]
- Wojciech, S. Modelling and Analysis of Damped Vibration in Hydraulic Cylinder. Math. Comput. Model. Dyn. Syst. 2014, 21, 23–37. [Google Scholar]
- Yuan Ho Shan, R.; Su, X. Deformation Characteristics and Stability Control of a Gateroad in Fully Mechanized Mining with Large Mining Height. Arab. J. Geosci. 2018, 11, 767. [Google Scholar] [CrossRef]
- Tan, Y.; Zhao, T.; Xiao, Y. Quantitative Prop Support Estimation and Remote Monitor Early Warning for Hard Roof Weighting at the Muchengjian Mine in China. Can. Geotech. J. 2010, 47, 947–954. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, K.; Wang, L.; Tian, J.; Ren, B.; Jiang, C.; Wang, S. Design of a Highly Adaptable Advance Support for a Deep, Fully Mechanized Roadway and Analysis of Its Support Performance. Appl. Sci. 2022, 12, 12728. https://doi.org/10.3390/app122412728
Ding K, Wang L, Tian J, Ren B, Jiang C, Wang S. Design of a Highly Adaptable Advance Support for a Deep, Fully Mechanized Roadway and Analysis of Its Support Performance. Applied Sciences. 2022; 12(24):12728. https://doi.org/10.3390/app122412728
Chicago/Turabian StyleDing, Ke, Lianguo Wang, Jiansheng Tian, Bo Ren, Chongyang Jiang, and Shuai Wang. 2022. "Design of a Highly Adaptable Advance Support for a Deep, Fully Mechanized Roadway and Analysis of Its Support Performance" Applied Sciences 12, no. 24: 12728. https://doi.org/10.3390/app122412728