
Collaborative Detection of Black Hole and Gray Hole Attacks for Secure Data Communication in VANETs
 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Using the linked dominant set (CDS) approach, we present a detection method for harmful Black Holes and Gray Holes using the nodes for intrusion detection. When used in dense networks, the proposed method is also effective in distinguishing hostile nodes, particularly those that use clever Gray Hole attacks.
- We use neural networks for efficient detection of attacks that results in better throughput as compared to conventional schemes.
- Comprehensive experimental results reveal that the proposed approach is an effective strategy for Black and Gray Hole attack identification compared with the state-of-the-art techniques.
2. Literature Review
3. Research Methodology
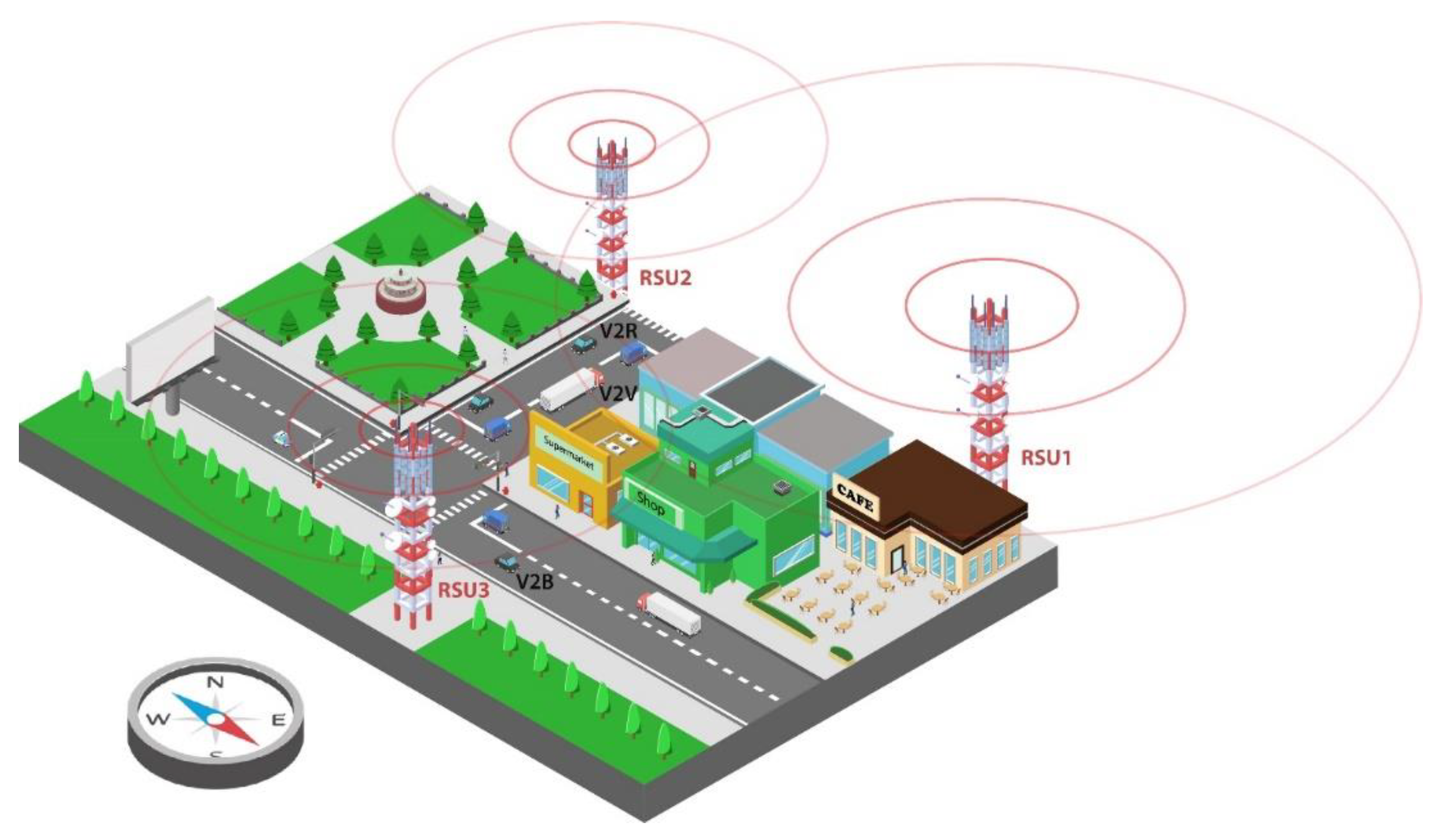
3.1. Technical Overview
3.2. Network Simulator 2 (NS-2)
3.3. Performance Evaluation
3.3.1. Dead Nodes Numbers
3.3.2. Alive Nodes Numbers
3.3.3. Cost Factor Calculation
- Sensor node energy
- Required Transmission powerwhere SNR is signal to noise ratio.
3.3.4. Performance Evaluation Metrics Compared with Other Protocols
Network Lifetime
3.3.5. Period of Stability
3.3.6. Residual Energy
3.3.7. Throughput
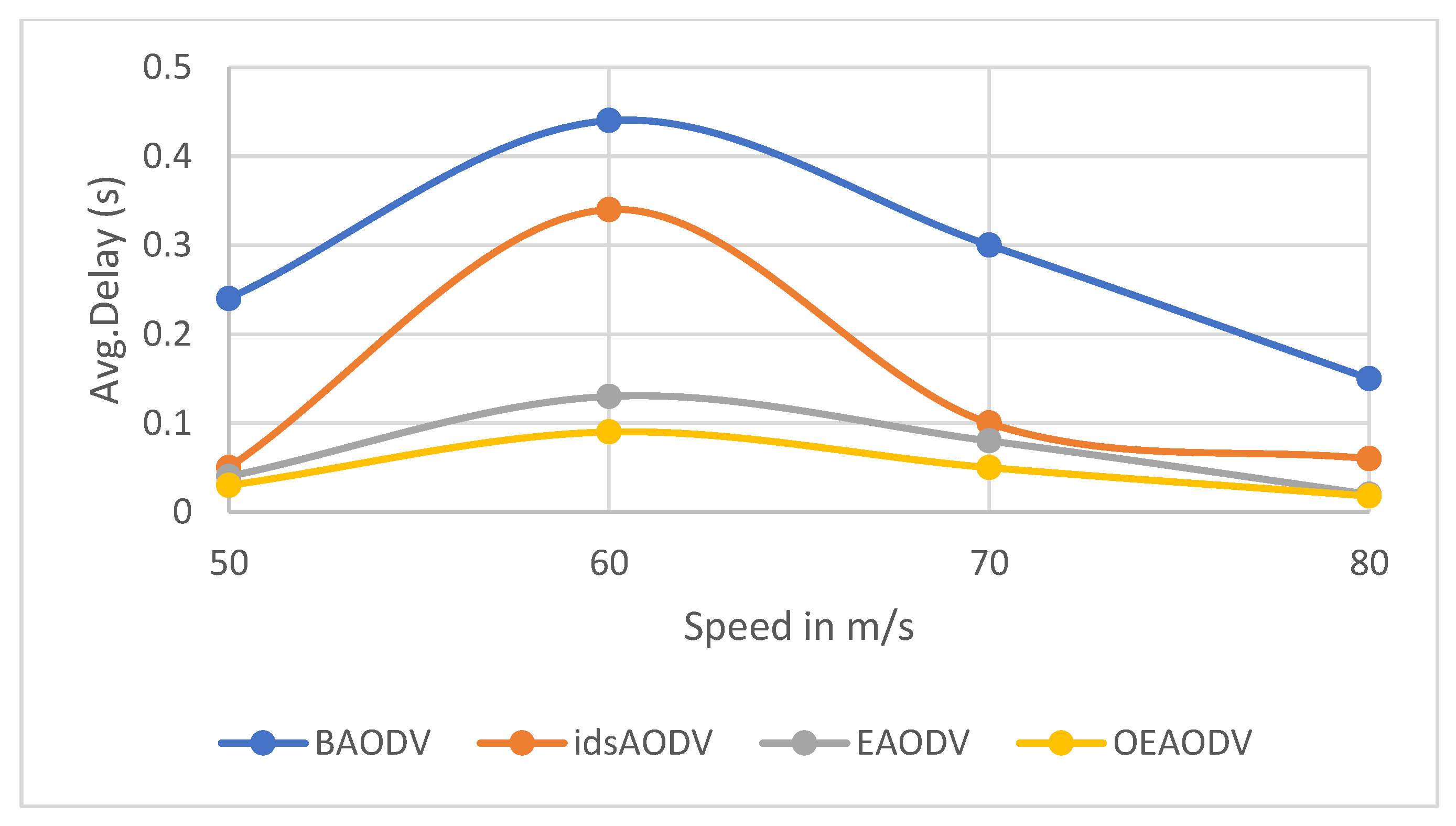
3.3.8. End to End Delay
4. Model Design and Implementation
4.1. System Model
4.1.1. Vehicle Behavior’s Stochastic Properties
4.1.2. Probabilistic Modeling
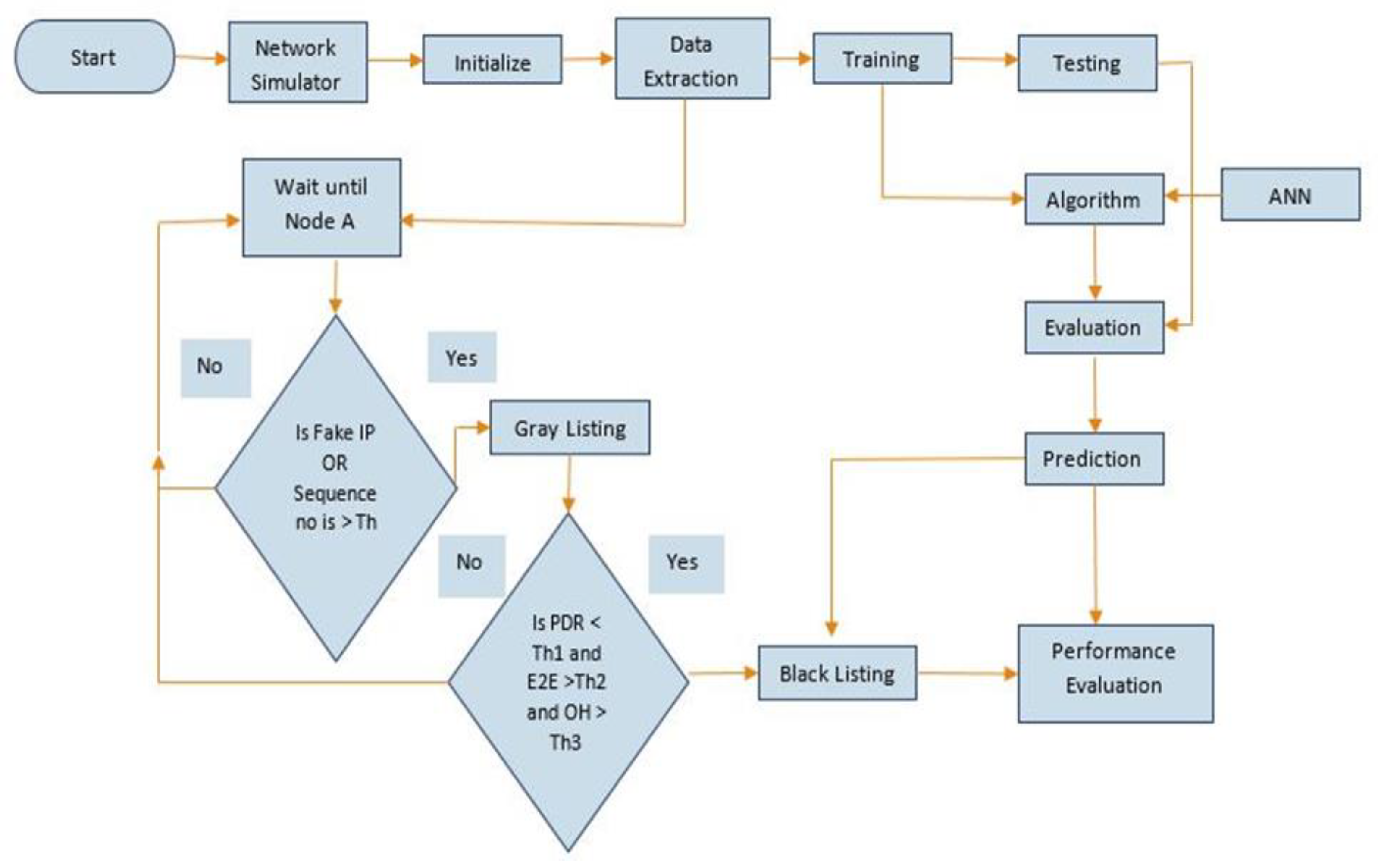
4.2. Proposed Technique
| Algorithm 1 Optimized enhanced ad hoc on-demand distance vector protocol |
| Input: Insecure data communication with Black Hole and Gray Hole attacks Output: Secure data communication with Black Hole and Gray Hole attacks 1: Start 2: SN floods RREQ with Fake IP 3: If (IN reply back to Fake IP) OR (Seq > Th1) (GrayListing) 4: SPN Affirmation 5: Initialization of normal AODV route discovery 6: Data packets Routing 7: If (PDR < Th2 and E2E delay > Th3 and overhead(OH) > Th4) or (Blacklisting) 8: MN Affirmation 9: Blacklisting MN 10: Addition of extra field in RREQ to encapsulate ID of MN for alarm 11: else 12: AODV (); 13: end if 14: else 15: start (); 16: end if 17: End |
5. Results and Discussion
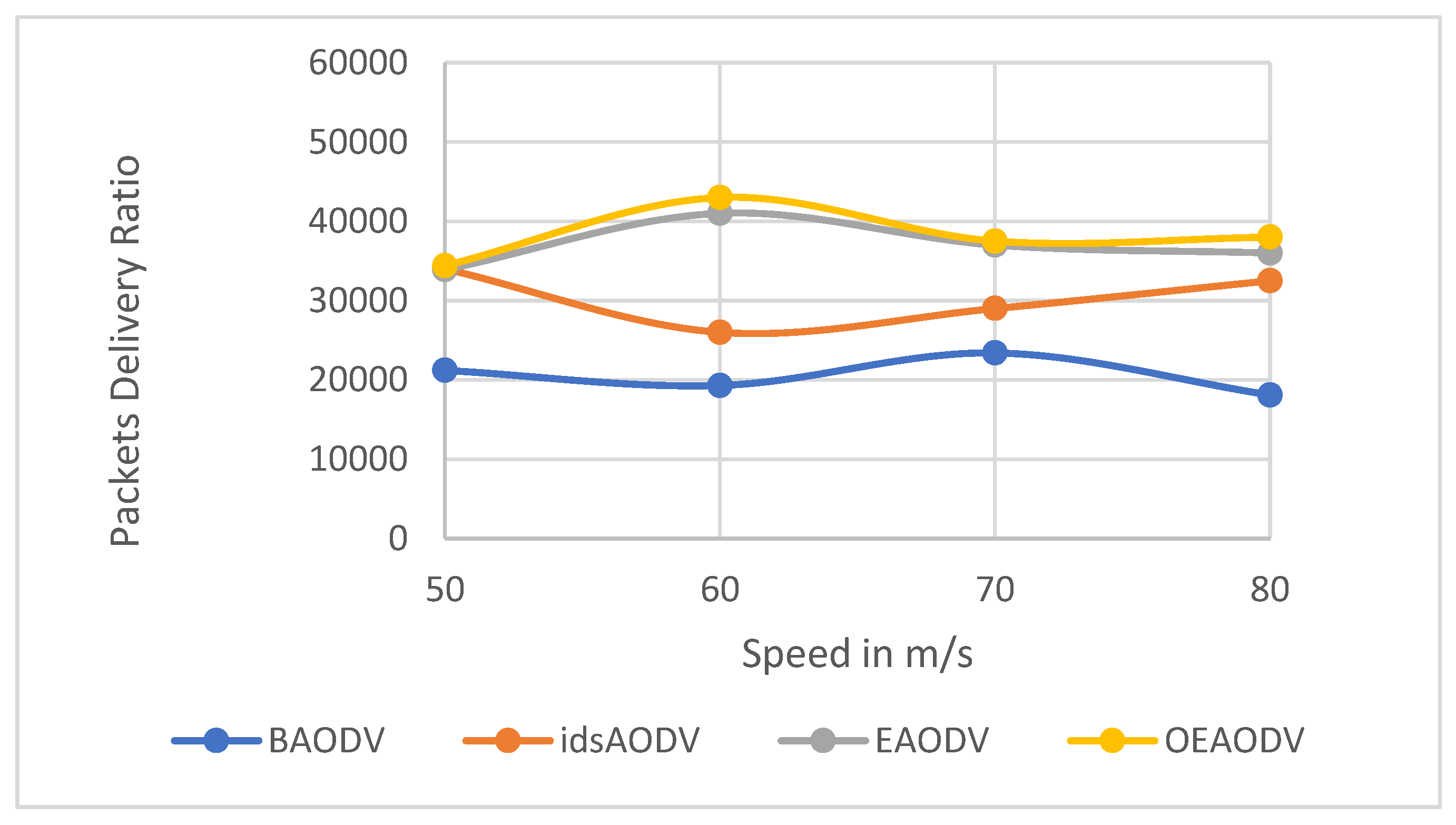
5.1. Packet Delivery Ratio (PDR)
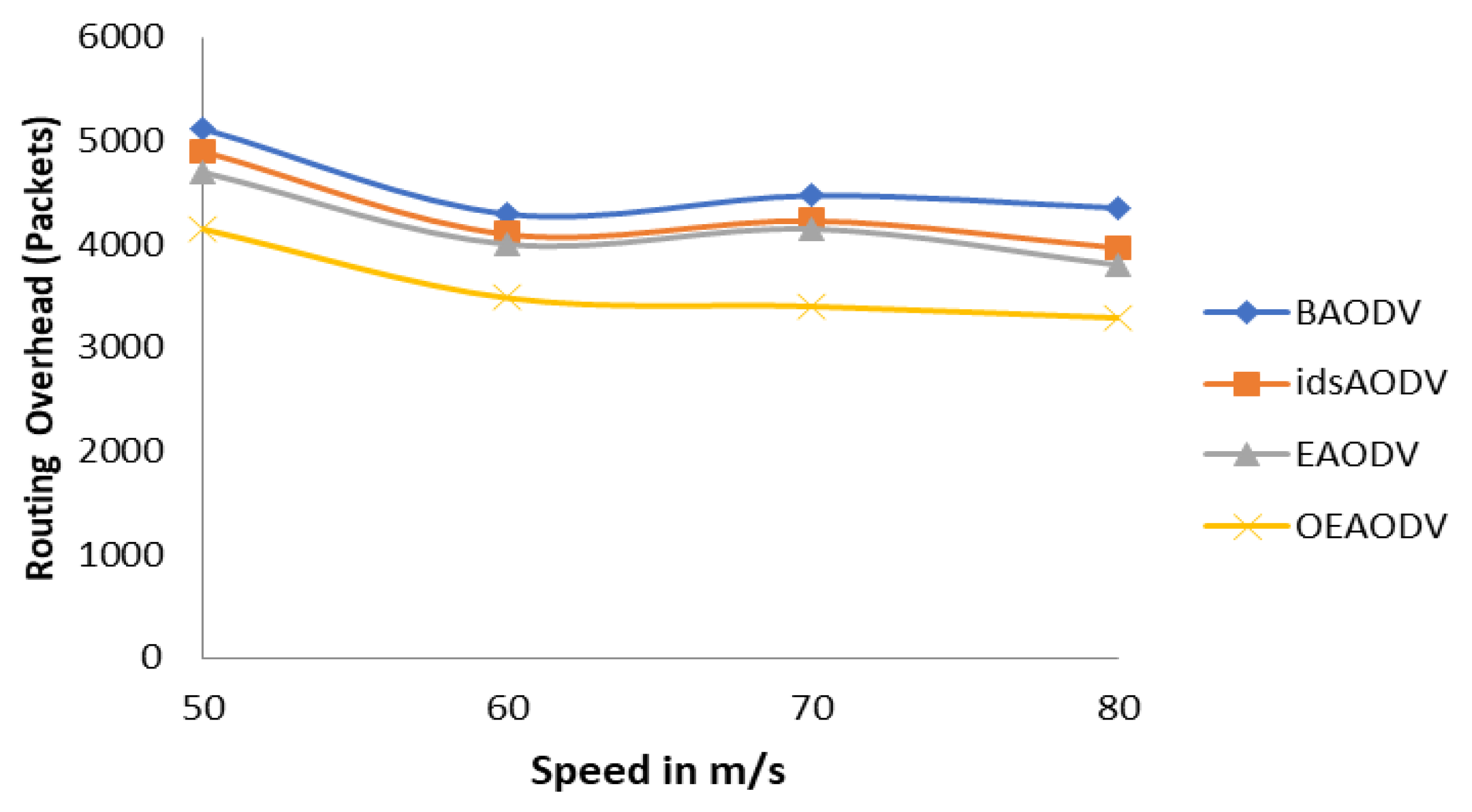
5.2. Routing Overhead (ROH)
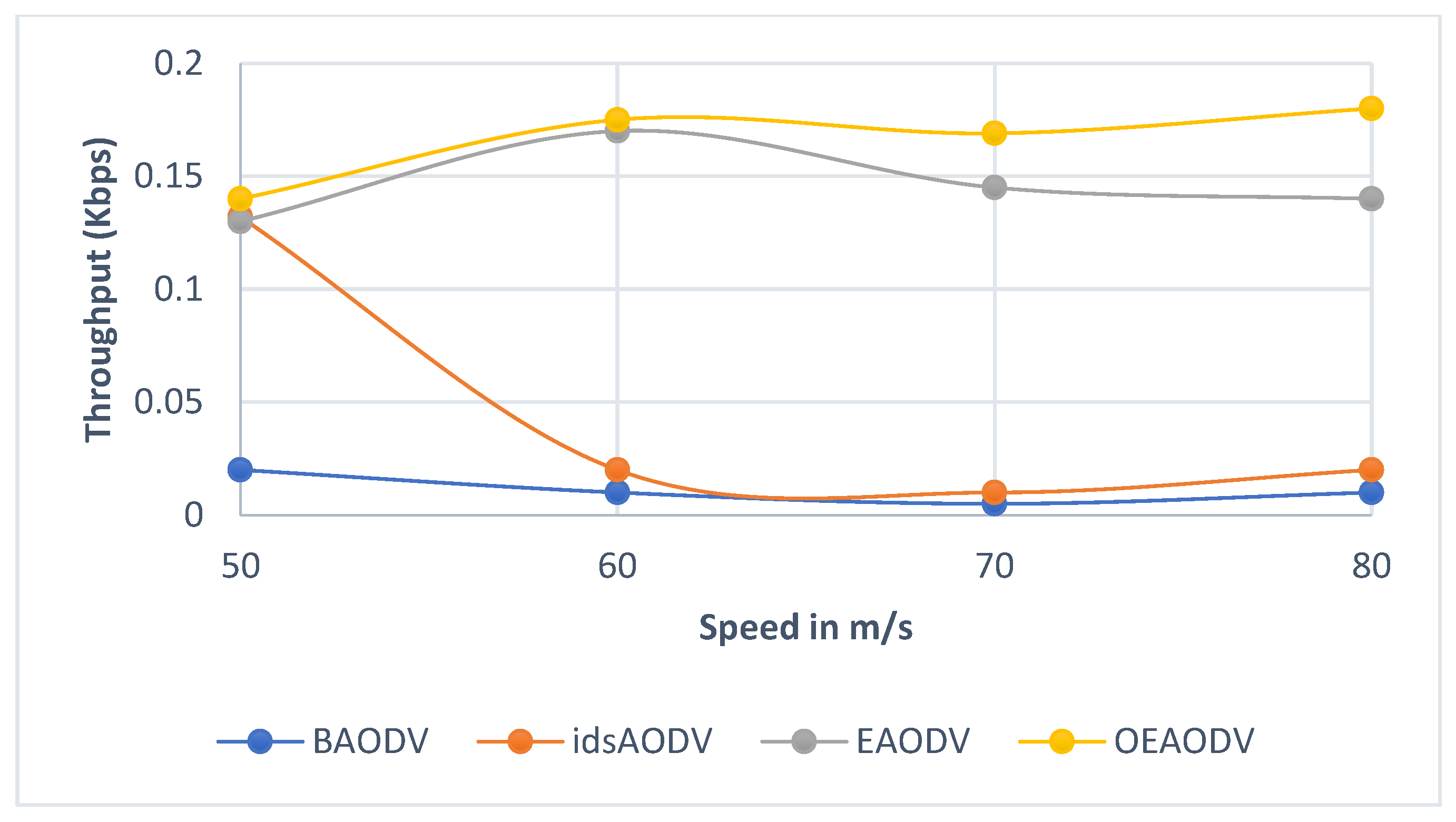
5.3. Throughput
5.4. Packet Loss Rate (PLR)
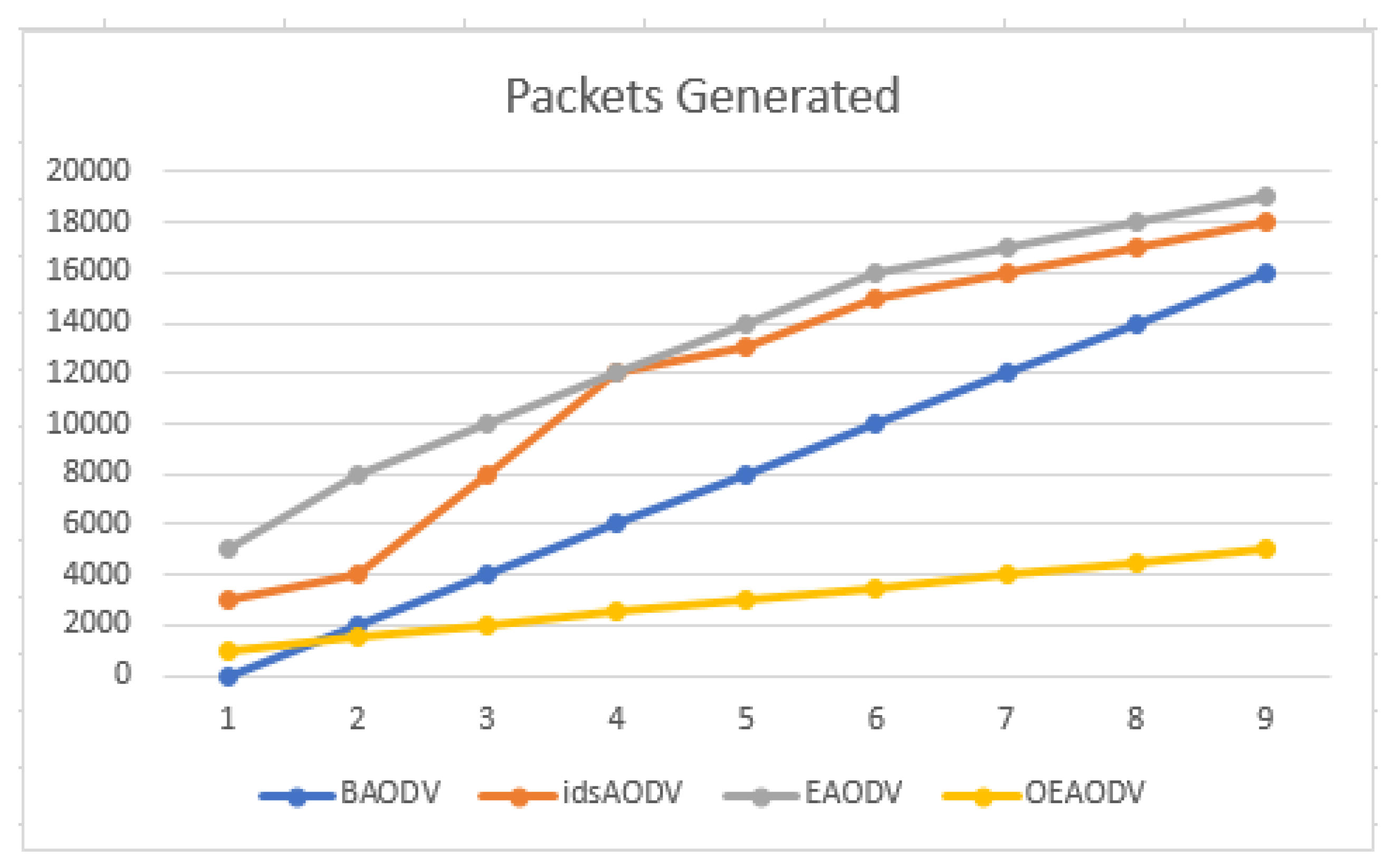
5.5. Packets Generated
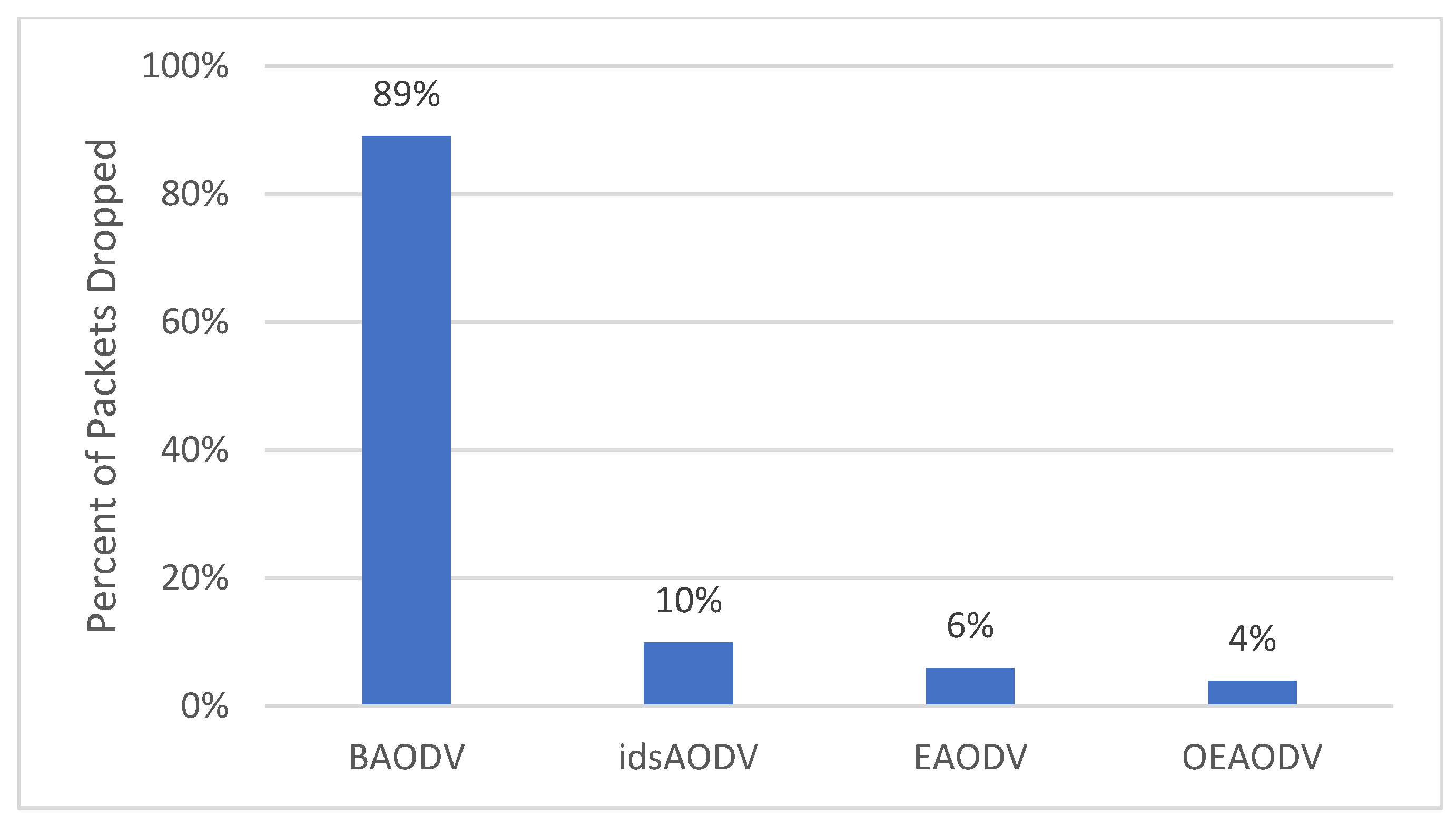
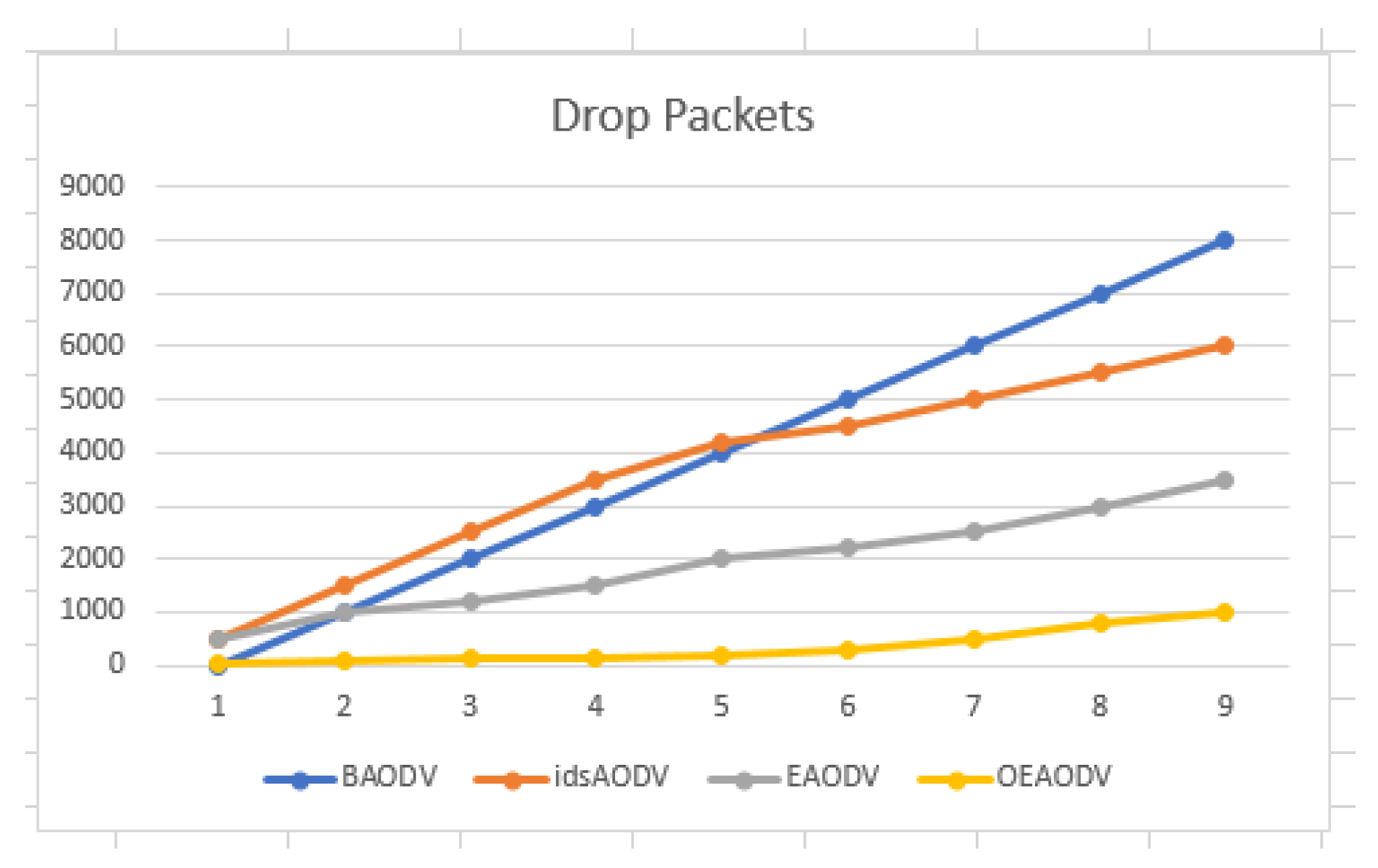
5.6. Packets Dropped
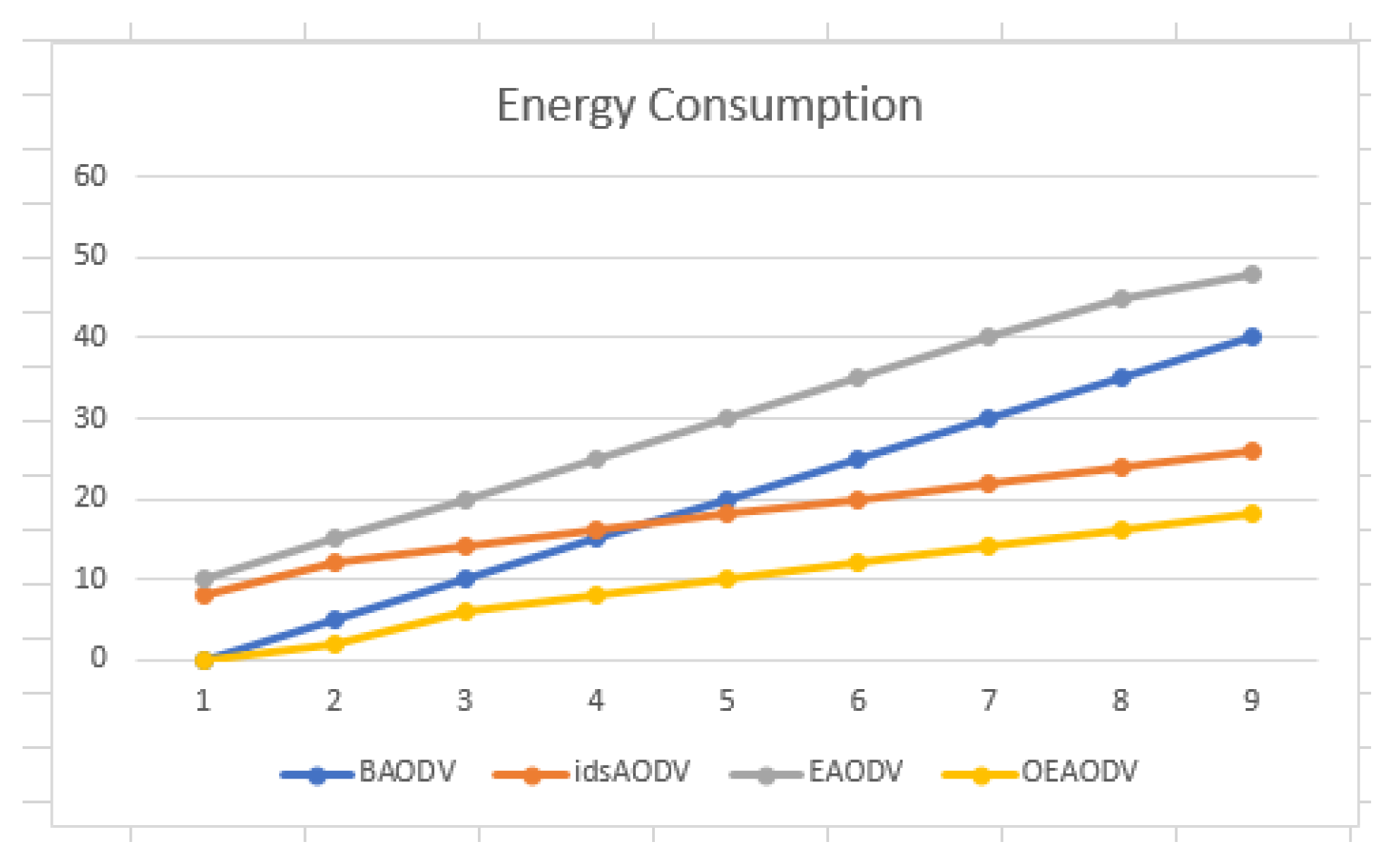
5.7. Energy Consumption
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dhyani, I.; Goel, N.; Sharma, G.; Mallick, B. A reliable tactic for detecting black hole attack in vehicular ad hoc networks. In Advances in Computer and Computational Sciences; Springer: Berlin/Heidelberg, Germany, 2017; pp. 333–343. [Google Scholar]
- MacCartney, G.R.; Rappaport, T.S.; Samimi, M.K.; Sun, S. Millimeter-wave omnidirectional path loss data for small cell 5G channel modeling. IEEE Access 2015, 3, 1573–1580. [Google Scholar] [CrossRef]
- Ali Zardari, Z.; He, J.; Zhu, N.; Mohammadani, K.H.; Pathan, M.S.; Hussain, M.I.; Memon, M.Q. A dual attack detection technique to identify black and gray hole attacks using an intrusion detection system and a connected dominating set in MANETs. Future Internet 2019, 11, 61. [Google Scholar] [CrossRef] [Green Version]
- Ali Alheeti, K.M.; Gruebler, A.; McDonald-Maier, K. Intelligent intrusion detection of gray hole and rushing attacks in self-driving vehicular networks. Computers 2016, 5, 16. [Google Scholar] [CrossRef] [Green Version]
- Irwin, R. Violence against Health Workers in Complex Security Environments; SIPRI: Stockholm, Sweden, 2014. [Google Scholar]
- Acquisti, A.; Carrara, E.; Stutzman, F.; Callas, J.; Schimmer, K.; Nadjm, M.; Gorge, M.; Ellison, N.; King, P.; Gross, R. Security Issues and Recommendations for Online Social Networks; ENISA Position Paper No. 1; ENISA—European Network and Information Security Agency: Heraklion, Greece, 2007; Volume 43. [Google Scholar]
- Huang, K.; Zhou, C.; Tian, Y.-C.; Tu, W.; Peng, Y. Application of Bayesian network to data-driven cyber-security risk assessment in SCADA networks. In Proceedings of the 2017 27th International Telecommunication Networks and Applications Conference (ITNAC), Melbourne, VIC, Australia, 22–24 November 2017; IEEE: New York, NY, USA, 2017. [Google Scholar]
- Kannan, R.; Ray, L.; Durresi, A.; Iyengar, S. Security-performance tradeoffs of inheritance based key predistribution for wireless sensor networks. arXiv 2004. [Google Scholar] [CrossRef]
- Elsaeidy, A.; Elgendi, I.; Munasinghe, K.S.; Sharma, D.; Jamalipour, A. A smart city cyber security platform for narrowband networks. In Proceedings of the 2017 27th International Telecommunication Networks and Applications Conference (ITNAC), Melbourne, VIC, Australia, 22–24 November 2017; IEEE: New York, NY, USA, 2017. [Google Scholar]
- Reddy, G. A Delay Sensitive Multi-Path Selection to Prevent the Rushing Attack in VANET. In Proceedings of the 2021 5th International Conference on Information Systems and Computer Networks (ISCON), Mathura, India, 22–23 October 2021; IEEE: New York, NY, USA, 2021. [Google Scholar]
- Sayan, C.; Hariri, S.; Ball, G. Cyber security assistant: Design overview. In Proceedings of the 2017 IEEE 2nd International Workshops on Foundations and Applications of Self* Systems (FAS* W), Tucson, AZ, USA, 18–22 September 2017; IEEE: New York, NY, USA, 2017. [Google Scholar]
- Nair, R.; Ragab, M.; Mujallid, O.A.; Mohammad, K.A.; Mansour, R.F.; Viju, G.K. Impact of wireless sensor data mining with hybrid deep learning for human activity recognition. Wirel. Commun. Mob. Comput. 2022, 2022, 9457536. [Google Scholar] [CrossRef]
- Tagarev, T. Digilience—A Platform for Digital Transformation, Cyber Security and Resilience. Inf. Secur. 2019, 43, 7–10. [Google Scholar] [CrossRef]
- Hamdi, M.M.; Audah, L.; Abood, M.S.; Rashid, S.A.; Mustafa, A.S.; Mahdi, H.; Al-Hiti, A.S. A review on various security attacks in vehicular ad hoc networks. Bull. Electr. Eng. Inform. 2021, 10, 2627–2635. [Google Scholar] [CrossRef]
- Singhal, P.; Raul, N. Malware detection module using machine learning algorithms to assist in centralized security in enterprise networks. arXiv 2012, arXiv:1205.3062. [Google Scholar] [CrossRef]
- Ali, S.; Islam, N.; Rauf, A.; Din, I.U.; Guizani, M.; Rodrigues, J.J.P.C. Privacy and security issues in online social networks. Future Internet 2018, 10, 114. [Google Scholar] [CrossRef] [Green Version]
- Ślezak, D.; Chadzyńska-Krasowska, A.; Holland, J.; Synak, P.; Glick, R.; Perkowski, M. Scalable cyber-security analytics with a new summary-based approximate query engine. In Proceedings of the 2017 IEEE International Conference on Big Data (Big Data), Boston, MA, USA, 11–14 December 2017; IEEE: New York, NY, USA, 2017. [Google Scholar]
- Andrade, R.O.; Yoo, S.G. Cognitive security: A comprehensive study of cognitive science in cybersecurity. J. Inf. Secur. Appl. 2019, 48, 102352. [Google Scholar] [CrossRef]
- Moustafa, A.A.; Bello, A.; Maurushat, A. The role of user behaviour in improving cyber security management. Front. Psychol. 2021, 1969. [Google Scholar] [CrossRef]
- Stacey, T.R.; Helsley, R.E.; Baston, J.V. Identifying information security threats. Inf. Syst. Secur. 1996, 5, 50–59. [Google Scholar]
- Nieles, M.; Dempsey, K.; Pillitteri, V. NIST Special Publication 800-12 Revision 1: An Introduction to Information Security; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2017. [Google Scholar]
- Zafar, F.; Khattak, H.A.; Aloqaily, M.; Hussain, R. Carpooling in Connected and Autonomous Vehicles: Current Solutions and Future Directions. ACM Comput. Surv. (CSUR) 2021, 54, 218. [Google Scholar] [CrossRef]
- Safaa, O.; Firas, S. On the Designing of two grains levels network intrusion detection system. Karbala Int. J. Mod. Sci. 2015, 1, 15–25. [Google Scholar]
- Singh, R.; Kumar, H.; Singla, R. An intrusion detection system using network traffic profiling and online sequential extreme learning machine. Expert Syst. Appl. 2015, 42, 86. [Google Scholar] [CrossRef]
- Rajasekharaiah, K.; Dule, C.S.; Sudarshan, E. Cyber Security Challenges and its Emerging Trends on Latest Technologies. In Proceedings of the International Conference on Recent Advancements in Engineering and Management (ICRAEM-2020), Warangal, India, 9–10 October 2020. [Google Scholar]
- Papamartzivanos, D.; Mármol, F.G.; Kambourakis, G. Dendron: Genetic trees driven rule induction for network intrusion detection systems. Future Gener. Comput. Syst. 2018, 79, 558–574. [Google Scholar] [CrossRef]
- Sornsuwit, P.; Jaiyen, S. A new hybrid machine learning for cybersecurity threat detection based on adaptive boosting. Appl. Artif. Intell. 2019, 33, 462–482. [Google Scholar] [CrossRef]
- Louvieris, P.; Clewley, N.; Liu, X. Effects-based feature identification for network intrusion detection. Neurocomputing 2013, 121, 265–273. [Google Scholar] [CrossRef]
- Harb, H.M.; Desuky, A.S. Adaboost ensemble with genetic algorithm post optimization for intrusion detection. Int. J. Comput. Sci. Issues IJCSI 2011, 8, 28. [Google Scholar]
- Kabir, E.; Hu, J.; Wang, H.; Zhuo, G. A novel statistical technique for intrusion detection systems. Future Gener. Comput. Syst. 2018, 79, 303–318. [Google Scholar] [CrossRef] [Green Version]
- Salih, A.A.; Adnan Mohsin, A. Evaluation of classification algorithms for intrusion detection system: A review. J. Soft Comput. Data Min. 2021, 2, 31–40. [Google Scholar] [CrossRef]
- Liu, X. An optimal-distance-based transmission strategy for lifetime maximization of wireless sensor networks. IEEE Sens. J. 2014, 15, 3484–3491. [Google Scholar] [CrossRef]
- Chou, D.; Jiang, M. A survey on data-driven network intrusion detection. ACM Comput. Surv. CSUR 2021, 54, 182. [Google Scholar] [CrossRef]
- Sajjad, S.M.; Mufti, M.R.; Yousaf, M.; Aslam, W.; Alshahrani, R.; Nemri, N.; Afzal, H.; Khan, M.A.; Chen, C.M. Detection and Blockchain-Based Collaborative Mitigation of Internet of Things Botnets. Wirel. Commun. Mob. Comput. 2022, 2022, 1194899. [Google Scholar] [CrossRef]
- Abdullah, A.M.; Ullah, I.; Khan, M.A.; Alsharif, M.H.; Mostafa, S.M.; Wu, J.M.T. An Efficient Multidocument Blind Signcryption Scheme for Smart Grid-Enabled Industrial Internet of Things. Wirel. Commun. Mob. Comput. 2022, 2022, 7779152. [Google Scholar] [CrossRef]
- Adeel, A.; Ali, M.; Khan, A.N.; Khalid, T.; Rehman, F.; Jararweh, Y.; Shuja, J. A multi-attack resilient lightweight IoT authentication scheme. Trans. Emerg. Telecommun. Technol. 2022, 33, e3676. [Google Scholar] [CrossRef]
- Khurshid, A.; Khan, A.N.; Khan, F.G.; Ali, M.; Shuja, J.; Khan, A.U.R. Secure-CamFlow: A device-oriented security model to assist information flow control systems in cloud environments for IoTs. Concurr. Comput. Pract. Exp. 2019, 31, e4729. [Google Scholar] [CrossRef]
- Palma, A.; Pereira, P.R.; Pereira, P.R.; Casaca, A. Multicast routing protocol for Vehicular Delay-Tolerant Networks. In Proceedings of the 2012 IEEE 8th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Barcelona, Spain, 8–10 October 2012; pp. 753–760. [Google Scholar] [CrossRef]
- Trivedi, I.N.; Jangir, P.; Parmar, S.A.; Jangir, N. Optimal power flow with voltage stability improvement and loss reduction in power system using Moth-Flame Optimizer. Neural Comput. Appl. 2018, 30, 1889–1904. [Google Scholar] [CrossRef]
- Aadil, F.; Raza, A.; Khan, M.F.; Maqsood, M.; Mehmood, I.; Rho, S. Energy aware cluster-based routing in flying ad-hoc networks. Sensors 2018, 18, 1413. [Google Scholar] [CrossRef] [Green Version]
- Panda, D.K.; Ranjan Kumar, D. Reliability evaluation and analysis of mobile ad hoc networks. Int. J. Electr. Comput. Eng. 2017, 7, 479. [Google Scholar] [CrossRef]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Younas, S.; Rehman, F.; Maqsood, T.; Mustafa, S.; Akhunzada, A.; Gani, A. Collaborative Detection of Black Hole and Gray Hole Attacks for Secure Data Communication in VANETs. Appl. Sci. 2022, 12, 12448. https://doi.org/10.3390/app122312448
Younas S, Rehman F, Maqsood T, Mustafa S, Akhunzada A, Gani A. Collaborative Detection of Black Hole and Gray Hole Attacks for Secure Data Communication in VANETs. Applied Sciences. 2022; 12(23):12448. https://doi.org/10.3390/app122312448
Chicago/Turabian StyleYounas, Shamim, Faisal Rehman, Tahir Maqsood, Saad Mustafa, Adnan Akhunzada, and Abdullah Gani. 2022. "Collaborative Detection of Black Hole and Gray Hole Attacks for Secure Data Communication in VANETs" Applied Sciences 12, no. 23: 12448. https://doi.org/10.3390/app122312448