
An Improved NSGA-II Algorithm Based on Adaptive Weighting and Searching Strategy

Abstract
:1. Introduction
- 1.
- An improved non-dominated ranking genetic algorithm is proposed to enhance the search ability by using Levy flight and random walk strategy, which can provide a larger search range and better local search ability.
- 2.
- To improve the accuracy and speed of convergence, an adaptive parameter is designed, which balances the exploration and development periods.
2. Preliminaries
2.1. Multi-Objective Optimization
2.2. NSGA-II Algorithm
3. Improved NSGA-II Algorithm
3.1. Levy Flight Strategy for Global Search
3.1.1. Levy Distribution
3.1.2. Levy Flight
3.2. Random Walk Strategy for Local Search
3.3. Framework and Details of INSGA-II Algorithm
- 1.
- The population distances of neighboring generations are consecutively less than the threshold.
- 2.
- The number of iterations reaches the maximum set value.
- 1.
- Initial population and set the evolutionary generation Gen = 1;
- 2.
- Generate the first generation sub-population by the Levy flight strategy and random wandering strategy and make the evolutionary generation Gen = 2;
- 3.
- Combine the parent population with the offspring population to form a new population.
- 4.
- Determine whether a new parent population has been generated; if not, calculate the objective function of individuals in the new population, and perform operations, such as fast non-dominated sorting, calculating crowding, and elite strategy, to generate a new parent population. Otherwise, go to step 5;
- 5.
- Perform adaptive iteration operations on the generated parent population to generate the child population;
- 6.
- Determine whether the termination condition is reached or whether Gen is equal to the maximum evolutionary generation; if neither is satisfied, the evolutionary generation Gen = Gen + 1 and return to step 3. Otherwise, run to the end.
4. Case Studies
4.1. Pareto Performance Evaluation Metrics
- 1.
- Inverted generational distanceIGD [16] is an average minimum distance between the solution set obtained from the search for the best and the true solution set. The decrease in the value of IGD means that the algorithm converges more effectively and is more closely related to the real Pareto front. The mathematical expression is as follows:in which is the ideal Pareto front, P is the collection of optimized solutions acquired from the algorithm, is the minimum Euclidean distance between the solution x of true Pareto and the found Pareto solution P obtained by the algorithm, and is the number of solutions in the solution set .
- 2.
- HypervolumeThe hypervolume [17] indicator refers to the volume of the area surrounded by the optimal set of solutions obtained by the algorithm and the selected reference points in the target space. With a larger value of HV, it means that the comprehensive performance of the algorithm is better. The mathematical expression is as follows:The HV metric allows assessing the convergence and diversity of the dominant solution set. In addition, the HV metric is obtained without real solution sets, so it can be widely used for engineering problems with unknown results in the real world.
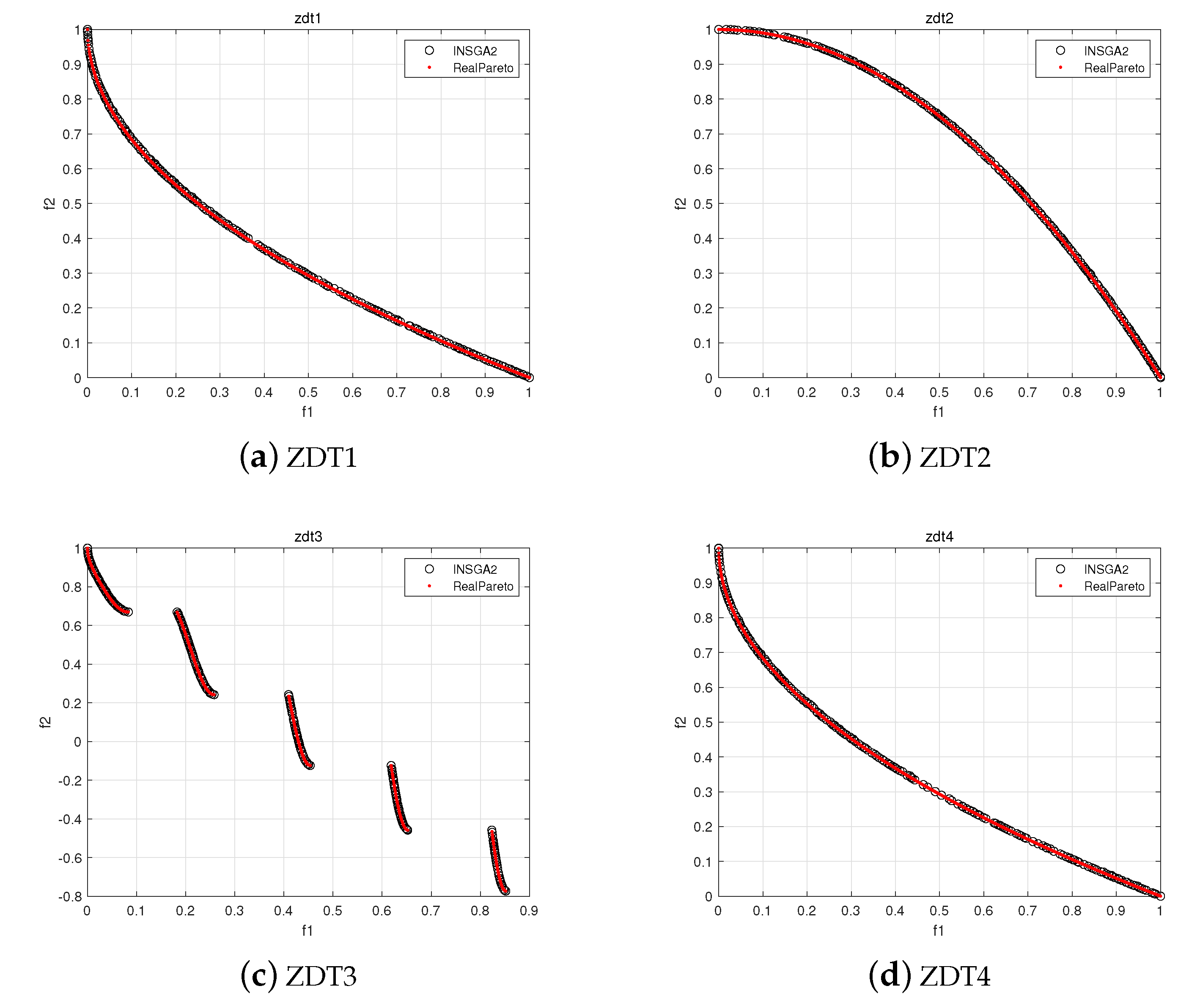
4.2. ZDT Test Functions
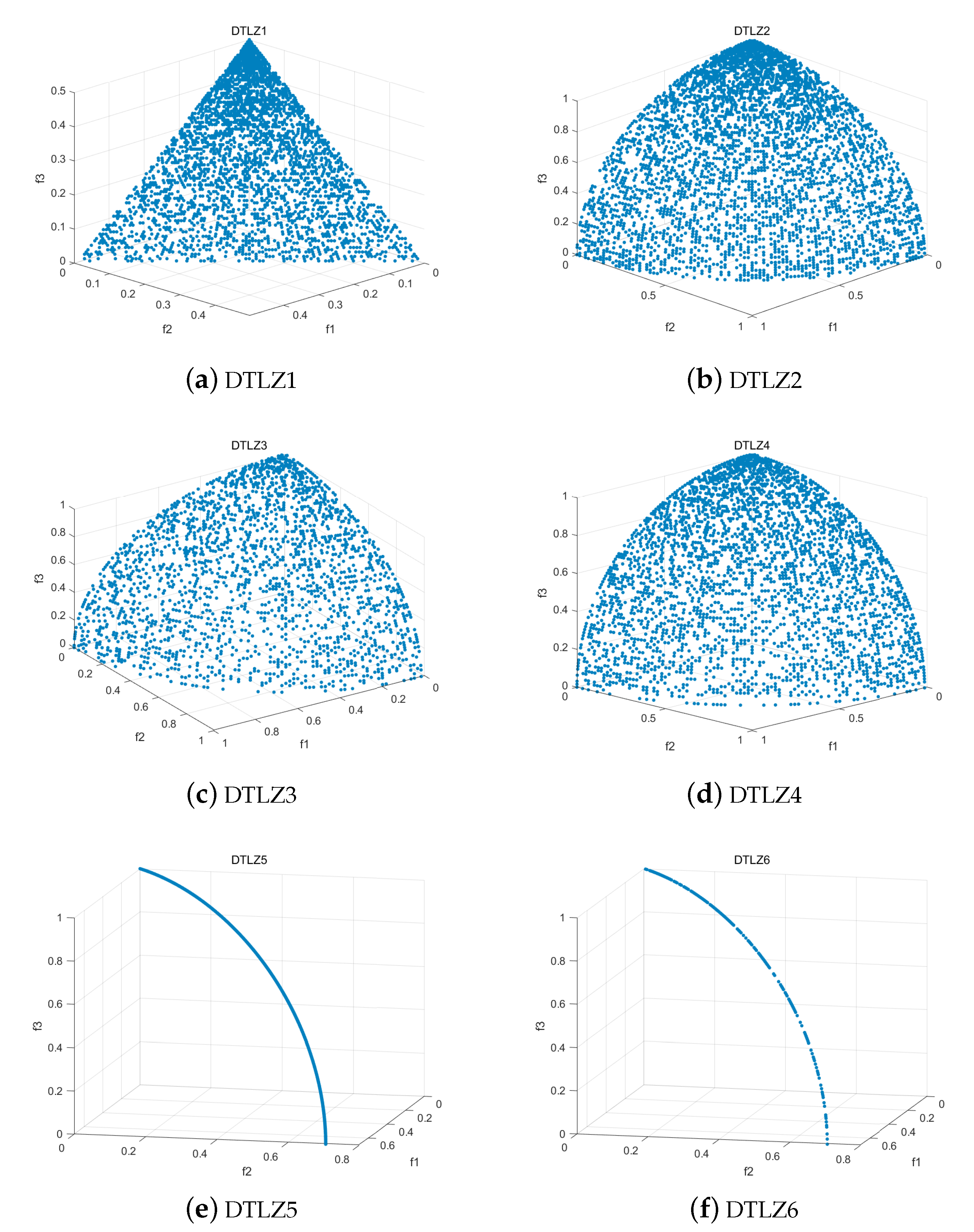
4.3. DTLZ Test Functions
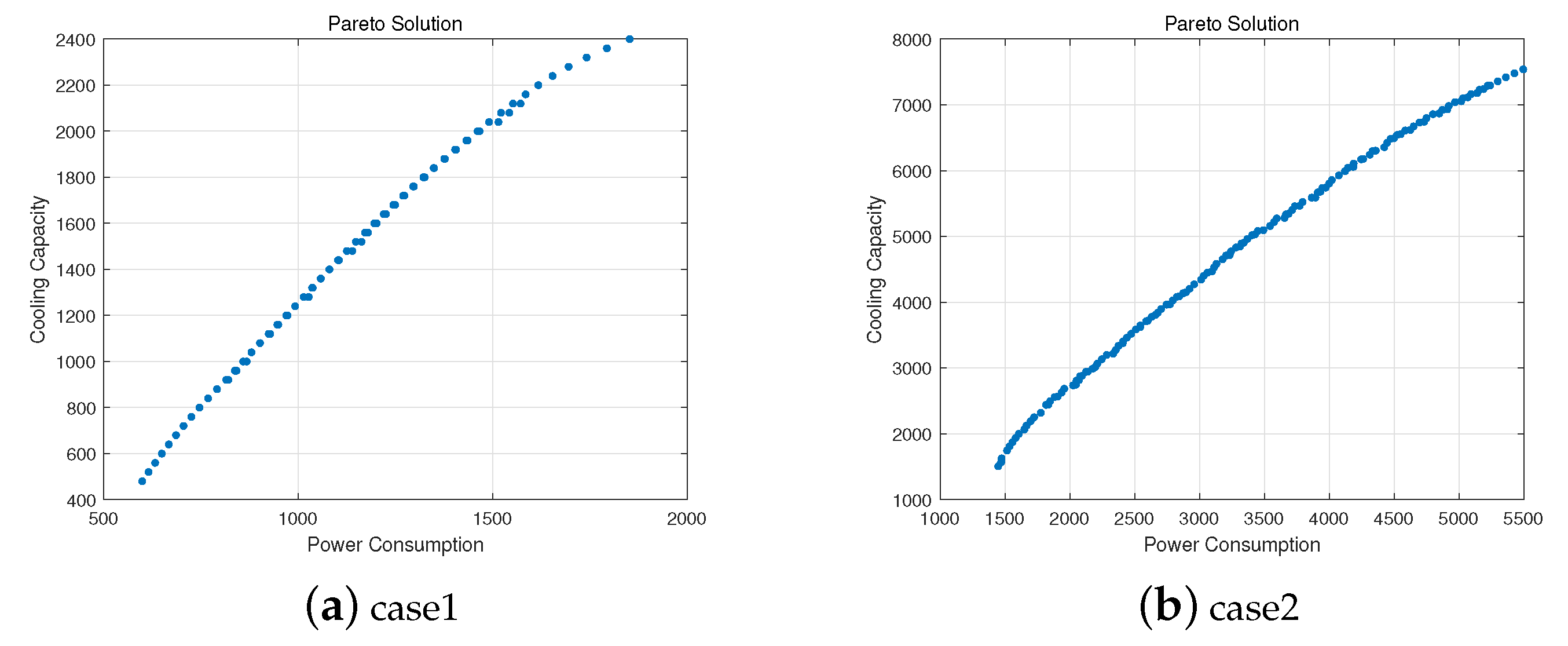
4.4. Parallel Chiller System
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Coello, C.A.C.; Brambila, S.G.; Gamboa, J.F.; Tapia, M.G.C. Multi-Objective Evolutionary Algorithms: Past, Present, and Future. In Black Box Optimization, Machine Learning, and No-Free Lunch Theorems; Pardalos, P.M., Rasskazova, V., Vrahatis, M.N., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 137–162. [Google Scholar]
- Zhong, K.; Zhou, G.; Deng, W.; Zhou, Y.; Luo, Q. MOMPA: Multi-objective marine predator algorithm. Comput. Methods Appl. Mech. Eng. 2021, 385, 114029. [Google Scholar] [CrossRef]
- Vikhar, P. Evolutionary algorithms: A critical review and its future prospects. In Proceedings of the 2016 International Conference on Global Trends in Signal Processing, Information Computing and Communication (ICGTSPICC), Jalgaon, India, 22–24 December 2016; pp. 261–265. [Google Scholar]
- Nedjah, N.; Mourelle, L. Evolutionary multi-objective optimisation: A survey. Int. J.-Bio-Inspired Comput. 2015, 7, 1–25. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Tian, Y.; Cheng, R.; Zhang, X.; Su, Y.; Jin, Y. A Strengthened Dominance Relation Considering Convergence and Diversity for Evolutionary Many-Objective Optimization. IEEE Trans. Evol. Comput. 2019, 23, 331–345. [Google Scholar] [CrossRef] [Green Version]
- Coello, C. Multi-Objective Evolutionary Algorithms in Real-World Applications: Some Recent Results and Current Challenges; Springer: Cham, Switzerland, 2015; pp. 3–18. [Google Scholar]
- Emmerich, M.; Deutz, A. A tutorial on multiobjective optimization: Fundamentals and evolutionary methods. Nat. Comput. 2018, 17, 585–609. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zitzler, E.; Thiele, L. Multiobjective evolutionary algorithms: A comparative case study and the strength Pareto approach. IEEE Trans. Evol. Comput. 1999, 3, 257–271. [Google Scholar] [CrossRef] [Green Version]
- Srinivas, N.; Deb, K. Multiobjective Optimization Using Nondominated Sorting in Genetic Algorithms. Evol. Comput. 1994, 2, 221–248. [Google Scholar] [CrossRef]
- Kukkonen, S.; Deb, K. Improved Pruning of Non-Dominated Solutions Based on Crowding Distance for Bi-Objective Optimization Problems. In Proceedings of the 2006 IEEE International Conference on Evolutionary Computation, Vancouver, BC, Canada, 16–21 July 2006; pp. 1179–1186. [Google Scholar]
- Viswanathan, G.; Afanasyev, V.; Buldyrev, S.V.; Havlin, S.; da Luz, M.; Raposo, E.; Stanley, H. Lévy flights search patterns of biological organisms. Phys. A Stat. Mech. Its Appl. 2001, 295, 85–88. [Google Scholar] [CrossRef]
- Elarbi, M.; Bechikh, S.; Gupta, A.; Ben Said, L.; Ong, Y.S. A New Decomposition-Based NSGA-II for Many-Objective Optimization. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1191–1210. [Google Scholar] [CrossRef]
- Li, R.; Gong, W.; Lu, C. Self-adaptive multi-objective evolutionary algorithm for flexible job shop scheduling with fuzzy processing time. Comput. Ind. Eng. 2022, 168, 108099. [Google Scholar] [CrossRef]
- Rodríguez Villalobos, C.A.; Coello Coello, C.A. A New Multi-Objective Evolutionary Algorithm Based on a Performance Assessment Indicator. In Proceedings of the 14th Annual Conference on Genetic and Evolutionary Computation, Philadelphia, PA, USA, 7–11 July 2012; Association for Computing Machinery: New York, NY, USA, 2012; GECCO ’12, pp. 505–512. [Google Scholar]
- Sun, Y.; Yen, G.G.; Zhang, Y. IGD Indicator-Based Evolutionary Algorithm for Many-Objective Optimization Problems. IEEE Trans. Evol. Comput. 2018, 23, 173–187. [Google Scholar] [CrossRef] [Green Version]
- Ishibuchi, H.; Imada, R.; Yu, S.; Nojima, Y. How to Specify a Reference Point in Hypervolume Calculation for Fair Performance Comparison. Evol. Comput. 2018, 26, 1–29. [Google Scholar] [CrossRef] [PubMed]
- Deb, K.; Sinha, A.; Kukkonen, S. Multi-objective test problems, linkages, and evolutionary methodologies. In Proceedings of the 8th Annual Conference on Genetic and Evolutionary Computation, Seattle, WD, USA, 8–12 July 2006; Volume 2, pp. 1141–1148. [Google Scholar]
- Zhang, Q.; Hui, L. MOEA/D: A Multiobjective Evolutionary Algorithm Based on Decomposition. IEEE Trans. Evol. Comput. 2008, 11, 712–731. [Google Scholar] [CrossRef]
- Zitzler, E.; Künzli, S. Indicator-Based Selection in Multiobjective Search. In Proceedings of the 8th International Conference on Parallel Problem Solving from Nature, Birmingham, UK, 18–22 September 2004. [Google Scholar]
- Zitzler, E.; Laumanns, M.; Thiele, L. SPEA2: Improving the Strength Pareto Evolutionary Algorithm. In Proceedings of the EUROGEN Conference, Lake Como, Italy, 15 April 2001; pp. 95–100. [Google Scholar]
- Datta, R.; Pradhan, S.; Bhattacharya, B. Analysis and Design Optimization of a Robotic Gripper Using Multiobjective Genetic Algorithm. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 16–26. [Google Scholar] [CrossRef]
- Chang, Y.C. Genetic algorithm based optimal chiller loading for energy conservation. Appl. Therm. Eng. 2005, 25, 2800–2815. [Google Scholar] [CrossRef]
- Tamayo-Rivera, L.; Hirata-Flores, F.I.; Ndez, J.A.R.H.; Rangel-Rojo, R. Survey of multi-objective optimization methods for engineering, structural multidisciplinary optimization. Struct. Multidiscip. Optim. 2018, 26, 369–395. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function Name | Mathematical Formula | Function Characteristic |
|---|---|---|
| ZDT1 | where | Convex, continuous |
| ZDT2 | where | Concave, continuous |
| ZDT3 | where | Concave, discontinuous |
| ZDT4 | where | Convex, multi-modal |
| Test Function | Comparison | Algorithm | |||
|---|---|---|---|---|---|
| NSGA-II | MOEA/D | IBEA | SPEA2 | INSGA-II | |
| ZDT1 | 0.0052 | 0.0271 | 0.0041 | 0.0042 | 0.0015 |
| ZDT2 | 0.0027 | 0.0132 | 0.0025 | 0.0032 | 0.0016 |
| ZDT3 | 0.0143 | 0.0471 | 0.0083 | 0.0091 | 0.0032 |
| ZDT4 | 0.0072 | 0.0147 | 0.0065 | 0.0062 | 0.0023 |
| Test Function | Comparison | Algorithm | |||
|---|---|---|---|---|---|
| NSGA-II | MOEA/D | IBEA | SPEA2 | INSGA-II | |
| ZDT1 | 0.7124 | 0.6951 | 0.7199 | 0.7191 | 0.9115 |
| ZDT2 | 0.6074 | 0.5865 | 0.6175 | 0.6327 | 0.8592 |
| ZDT3 | 0.7331 | 0.5753 | 0.7486 | 0.7362 | 0.9269 |
| ZDT4 | 0.7083 | 0.6608 | 0.7168 | 0.7240 | 0.8866 |
| Function Name | Mathematical Formula |
|---|---|
| DTLZ1 | |
| DTLZ2 | |
| DTLZ3 | |
| DTLZ4 | |
| DTLZ5 | |
| DTLZ6 |
| Test Function | Comparison | Algorithm | |||
|---|---|---|---|---|---|
| NSGA-II | MOEA/D | IBEA | SPEA2 | INSGA-II | |
| DTLZ1 | 0.131 | 0.236 | 0.097 | 0.089 | 0.085 |
| DTLZ2 | 0.377 | 0.576 | 0.284 | 0.262 | 0.205 |
| DTLZ3 | 1.741 | 2.464 | 1.074 | 1.191 | 0.807 |
| DTLZ4 | 0.561 | 0.896 | 0.320 | 0.334 | 0.231 |
| DTLZ5 | 0.142 | 0.264 | 0.092 | 0.089 | 0.053 |
| DTLZ6 | 0.278 | 0.529 | 0.108 | 0.095 | 0.052 |
| Test Case | Chiller | Capacity | ||||
|---|---|---|---|---|---|---|
| Case 1 | 1 | 100.95 | 818.61 | −973.43 | 788.55 | 800 |
| 2 | 66.598 | 606.34 | −380.58 | 275.95 | 800 | |
| 3 | 130.09 | 304.58 | 14.377 | 99.80 | 800 | |
| Case 2 | 1 | 399.345 | −122.12 | 770.46 | - | 1200 |
| 2 | 287.116 | 80.04 | 700.48 | - | 1280 | |
| 3 | −120.505 | 1525.99 | −502.14 | - | 1280 | |
| 4 | −19.121 | 898.76 | −98.15 | - | 1280 | |
| 5 | −95.029 | 1202.39 | −352.16 | - | 1250 | |
| 6 | 191.750 | 224.86 | 524.04 | - | 1250 |
| Load Requirements | NSGA-II | MOEA/D | IBEA | SPEA2 | INSGA-II |
|---|---|---|---|---|---|
| 2160 | 1589.4 | 1591.2 | 1574.9 | 1575.3 | 1565.3 |
| 1920 | 1419.4 | 1421.1 | 1413.4 | 1412.4 | 1406.5 |
| 1680 | 1250.6 | 1251.3 | 1247.9 | 1244.5 | 1242.5 |
| 1440 | 1007.4 | 1017.2 | 998.3 | 997.1 | 994.9 |
| 1200 | 923.1 | 945.8 | 862.2 | 854.6 | 842.7 |
| 960 | 742.8 | 781.4 | 715.3 | 712.0 | 697.8 |
| Load Requirements | NSGA-II | MOEA/D | IBEA | SPEA2 | INSGA-II |
|---|---|---|---|---|---|
| 6850 | 4768.3 | 4819.5 | 4758.0 | 4754.6 | 4743.4 |
| 6470 | 4449.6 | 4453.4 | 4432.9 | 4431.1 | 4423.3 |
| 6090 | 4185.8 | 4189.9 | 4161.6 | 4152.4 | 4142.7 |
| 5710 | 3940.7 | 3951.0 | 3922.4 | 3918.2 | 3904.6 |
| 5330 | 3656.2 | 3682.5 | 3641.4 | 3638.3 | 3626.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, J.; Yang, X.; Wang, C.; Tu, R.; Zhang, T. An Improved NSGA-II Algorithm Based on Adaptive Weighting and Searching Strategy. Appl. Sci. 2022, 12, 11573. https://doi.org/10.3390/app122211573
Hao J, Yang X, Wang C, Tu R, Zhang T. An Improved NSGA-II Algorithm Based on Adaptive Weighting and Searching Strategy. Applied Sciences. 2022; 12(22):11573. https://doi.org/10.3390/app122211573
Chicago/Turabian StyleHao, Jian, Xu Yang, Chen Wang, Rang Tu, and Tao Zhang. 2022. "An Improved NSGA-II Algorithm Based on Adaptive Weighting and Searching Strategy" Applied Sciences 12, no. 22: 11573. https://doi.org/10.3390/app122211573