
Modelling the Interaction between a Laterally Deflected Car Tyre and a Road Surface

 , , and
, , and
Abstract
:1. Introduction
2. The Tyre–Road Model
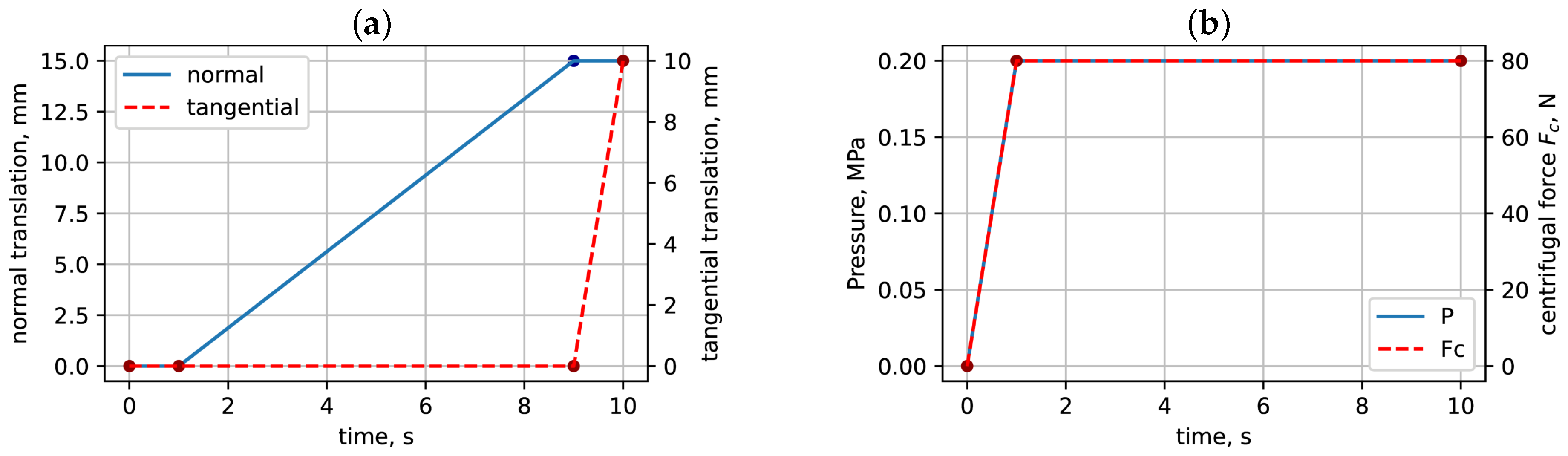
2.1. Problem Description
2.2. Tyre–Road Geometry
2.3. Mechanical Properties of Components
2.4. Tyre Material Model
2.5. Contact Interaction Asymmetry
2.6. Contact Friction Coefficient
2.7. Tyre–Road Finite Element Mesh
3. Results and Discussion
4. Conclusions
- 1.
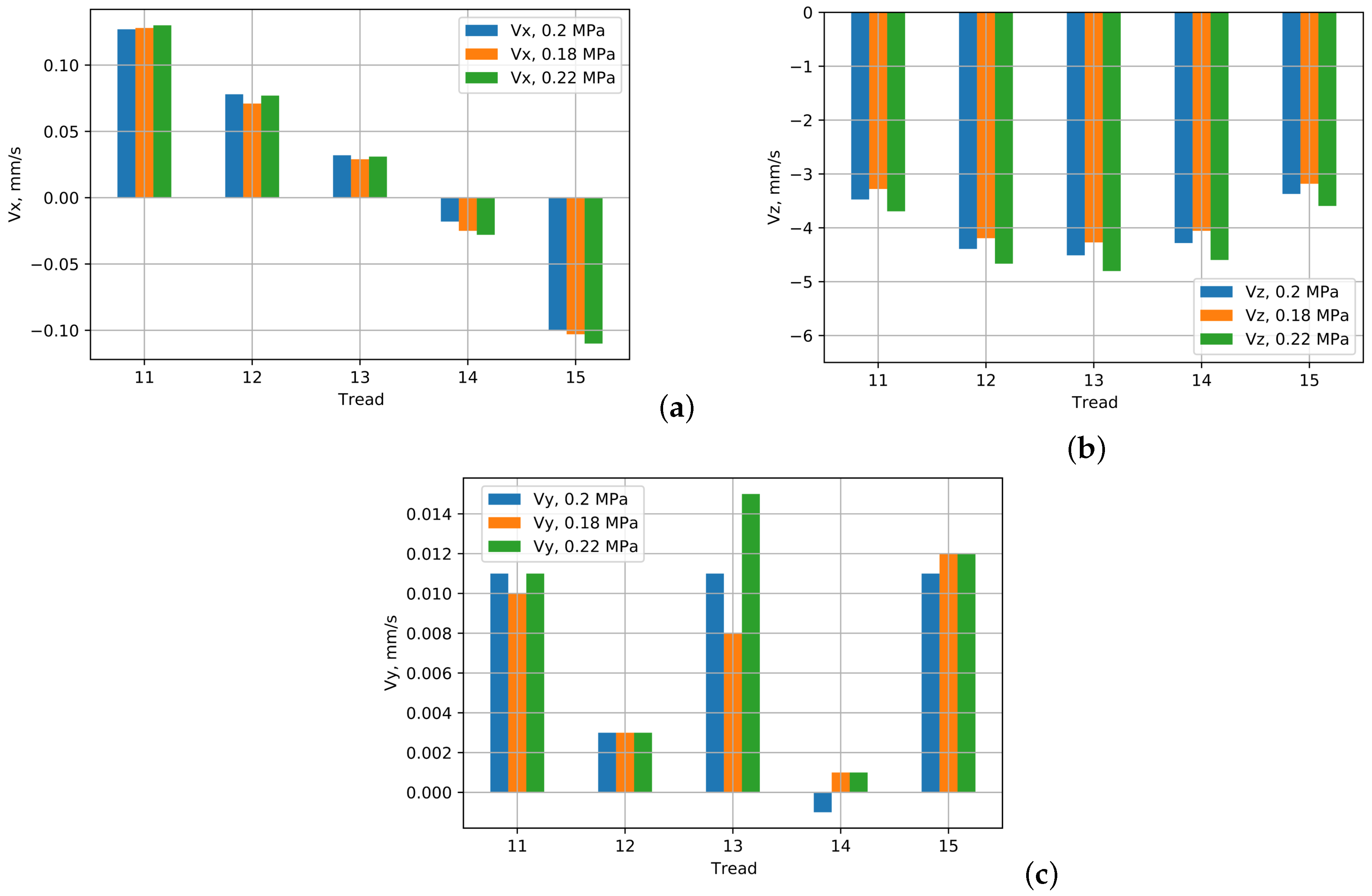
- In the case of a slight asymmetry in the tread pattern of the tyre, in the contact area between the tyre and the road surface, the slip velocities of the treads at opposite points in the contact area (11 and 15) in the radial direction of the tyre were different in size and opposite signs. This suggests that the treads on different sides of the contact zone would generate different frictional forces and have different amounts of tread wear. Tread slip rates in the longitudinal contact zone of the tyre in the transverse section of the contact zone were almost the same. This trend of slip speeds was observed for different tyre pressures.
- 2.
- In the case of a slight asymmetry in the tread pattern of the tyre, it was found that, in the area of contact between the tyre and the road surface, the vertical velocity distributions of the treads in the transverse direction of the tyre (11 to 15 treads) were almost the same.
- 3.
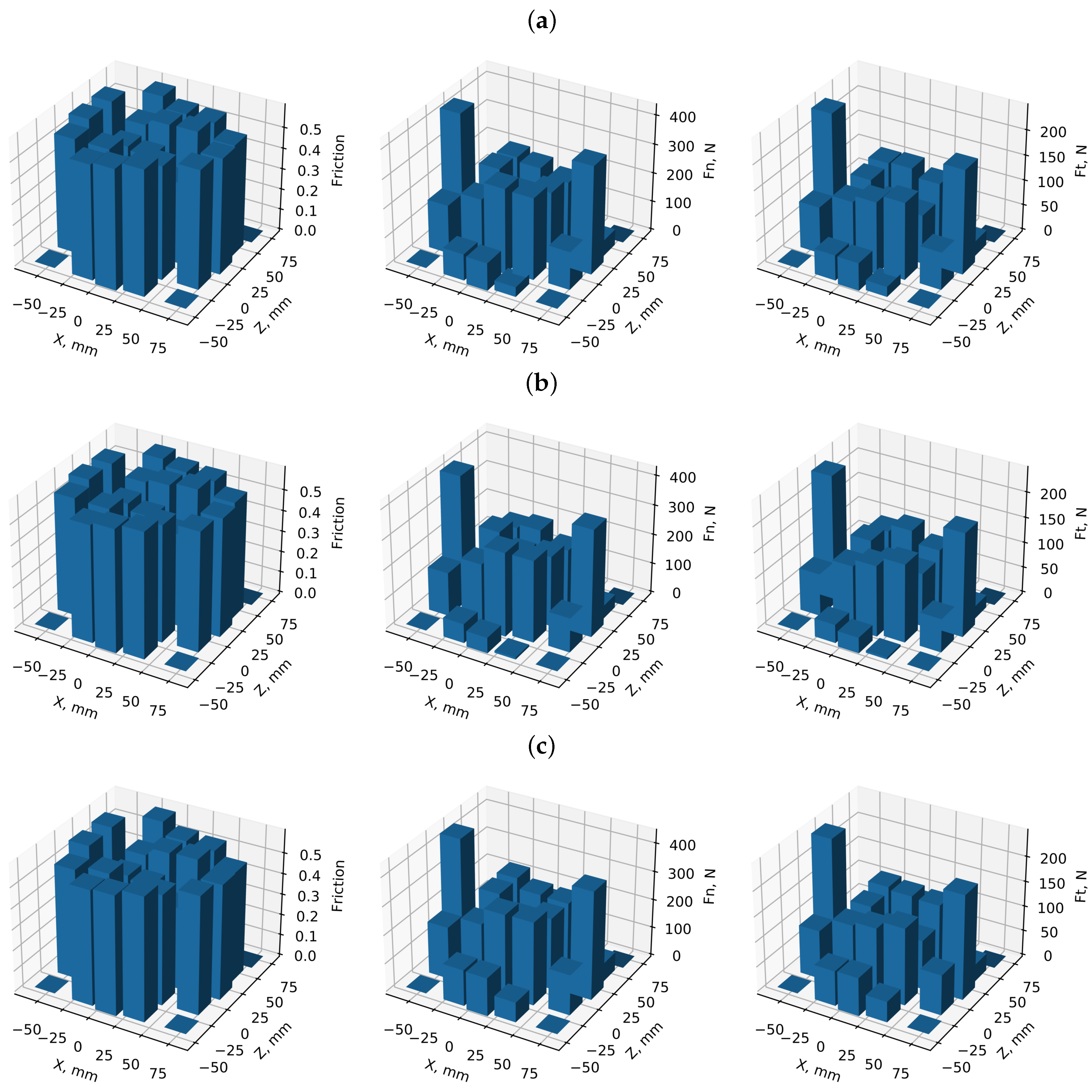
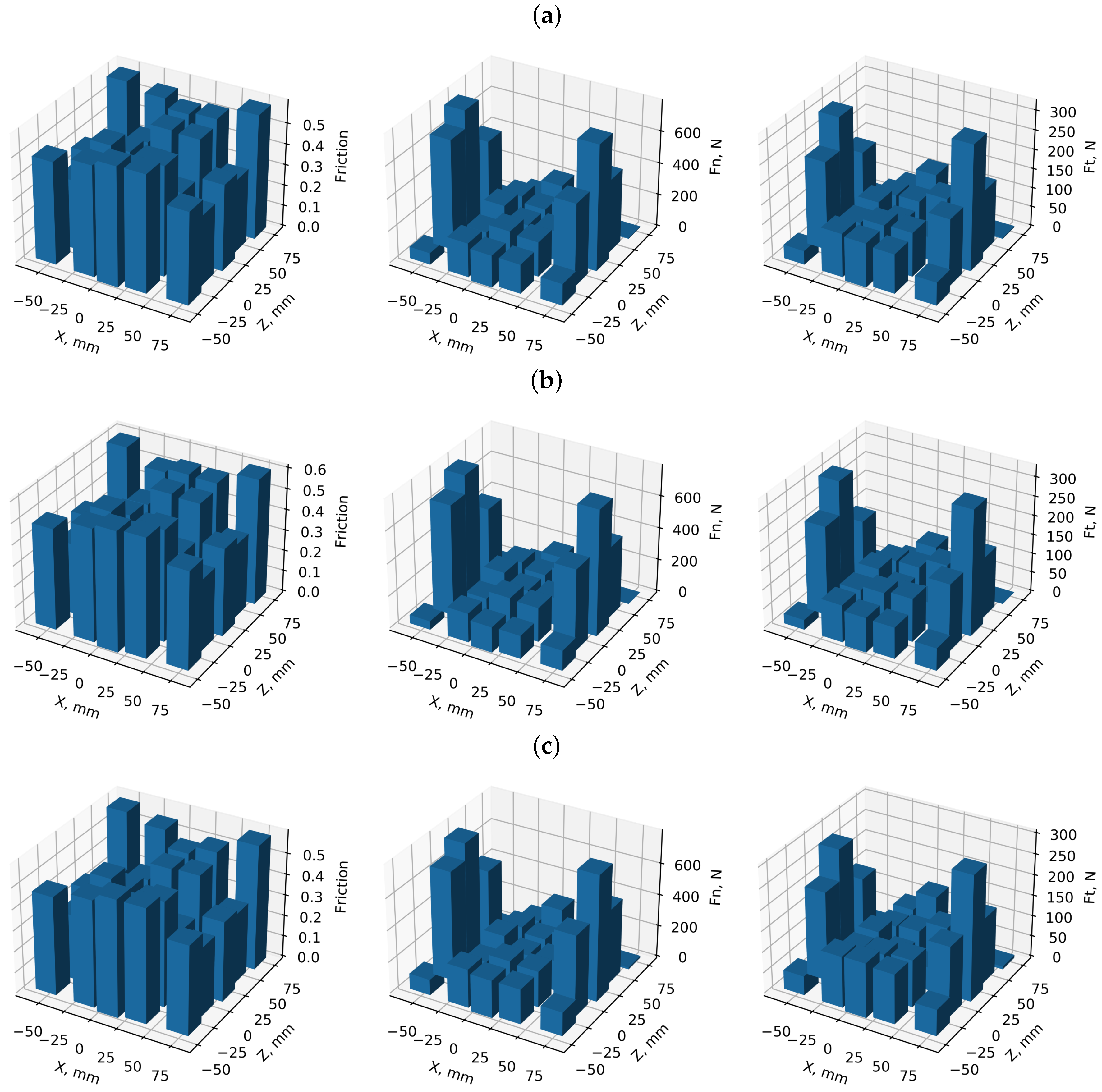
- Due to the slight asymmetry of the tyre tread pattern, the contact normal and tangential tread forces at the edges of the tyre were higher than at the centre of contact of the tyre, and the right and left tread forces were different, a trend that persisted at different wheel vertical loads of 4 kN and 6 kN.
- 4.
- Finally, when talking about the safety of a moving car, we should keep in mind the asymmetry of tyre tread patterns, which can influence instability due to asymmetric tangential forces in the tyre contact zone during braking when the tyre is in an overdeflected state.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Singh, K.B.; Arat, M.A.; Taheri, S. Literature review and fundamental approaches for vehicle and tire state estimation. Veh. Syst. Dyn. 2019, 57, 1643–1665. [Google Scholar] [CrossRef]
- Ge, H.; Quezada, J.C.; Houerou, V.L.; Chazallon, C. Multiscale analysis of tire and asphalt pavement interaction via coupling FEM–DEM simulation. Eng. Struct. 2022, 256, 113925. [Google Scholar] [CrossRef]
- Tomaraee, P.; Mardani, A.; Mohebbi, A.; Taghavifar, H. Relationships among the contact patch length and width, the tire deflection and the rolling resistance of a free-running wheel in a soil bin facility. Span. J. Agric. Res. 2015, 13, e0211. [Google Scholar] [CrossRef] [Green Version]
- Janulevičius, A.; Damanauskas, V. Prediction of tractor drive tire slippage under different inflation pressures. J. Terramech. 2022, 101, 23–31. [Google Scholar] [CrossRef]
- Jun, H.; Way, T.; Löfgren, B.; Landström, M.; Bailey, A.; Burt, E.; McDonald, T. Dynamic Load and Inflation Pressure Effects on Contact Pressure of a Forestry Forwarder Tire. J. Terramech. 2004, 41, 209–222. [Google Scholar] [CrossRef]
- Smith, W.; Melanz, D.; Senatore, C.; Iagnemma, K.; Peng, H. Comparison of discrete element method and traditional modeling methods for steady-state wheel-terrain interaction of small vehicles. J. Terramech. 2014, 56, 61–75. [Google Scholar] [CrossRef]
- Hernandez, J.A.; Al-Qadi, I.L. Tire–pavement interaction modelling: Hyperelastic tire and elastic pavement. Road Mater. Pavement Des. 2017, 18, 1067–1083. [Google Scholar] [CrossRef]
- Sha, J.; Wu, J.; Wang, Y.S.; Su, B.L.; Liu, Q. Experimental and Numerical Studies on Tire Tread Block Friction Characteristics Based on a New Test Device. Adv. Mater. Sci. Eng. 2014, 2014, 816204. [Google Scholar] [CrossRef] [Green Version]
- Bogdevičius, M.; Ružinskas, A.; Vadlūga, V.; Bogdevičius, P.; Kačianauskas, R.; Maknickas, A.; Gauterin, F. Investigation Of Tire Force Transmission On Interaction With Slush. Transp. Probl. 2019, 14, 13–21. [Google Scholar] [CrossRef] [Green Version]
- Tolpekina, T.V.; Persson, B.N.J. Adhesion and Friction for Three Tire Tread Compounds. Lubricants 2019, 7, 20. [Google Scholar] [CrossRef]
- Yamakawa, J.; Yoshimura, S.; Watanabe, K. A tire model for vehicle motion analysis on dry sand. J. Terramech. 2014, 56, 49–59. [Google Scholar] [CrossRef]
- Lee, J.H. Calibration and validation of a tire–snow interaction model. J. Terramech. 2013, 50, 289–302. [Google Scholar] [CrossRef]
- Choi, J.; Cho, J.; Woo, J.; Kim, K.W. Numerical investigation of snow traction characteristics of 3-D patterned tire. J. Terramech. 2012, 49, 81–93. [Google Scholar] [CrossRef]
- Walus, K.J.; Olszewski, Z. Analysis of tire-road contact under winter conditions. Proc. World Congr. Eng. 2011, 1, 1546. [Google Scholar]
- Shoop, S.; Kestler, K.; Haehnel, R. Finite element modeling of tires on snow. Tire Sci. Technol. 2006, 34, 2–37. [Google Scholar] [CrossRef]
- Bailer, A.; Raper, R.; Way, T.; Burt, E.; Johnson, C. Soil Stress under a Tractor Tire at Various Load and Inflation Pressures. J. Terramech. 1996, 33, 1–11. [Google Scholar] [CrossRef]
- Giessler, M.; Gauterin, F.; Wiese, K.; Wies, B. Influence of Friction Heat on Tire Traction on Ice and Snow. Tire Sci. Technol. 2010, 38, 4–23. [Google Scholar] [CrossRef]
- Ge, Y.; Yan, Y.; Yan, X.; Meng, Z. Extending the tire dynamic model range of operating conditions based on finite element method. Adv. Mech. Eng. 2022, 14, 16878132221085454. [Google Scholar] [CrossRef]
- El-Sayegh, Z.; El-Gindy, M. Cornering characteristics of a truck tire on wet surface using finite element analysis and smoothed-particle hydrodynamics. Int. J. Dyn. Control 2018, 6, 1567–1576. [Google Scholar] [CrossRef]
- Yamashita, H.; Chen, G.; Ruan, Y.; Jayakumar, P.; Sugiyama, H. Hierarchical Multiscale Modeling of Tire–Soil Interaction for Off-Road Mobility Simulation. J. Comput. Nonlinear Dyn. 2019, 14, 061007. [Google Scholar] [CrossRef]
- Hou, Y.; Wang, X.; Sun, W.; Wang, L. A multiscale DEM-FEM approach to investigate the tire–pavement friction. Int. J. Pavement Eng. 2018, 19, 399–406. [Google Scholar] [CrossRef]
- Bui, H.; Fukagawa, R.; Sako, K.; Ohno, S. Lagrangian meshfree particles method (SPH) for large deformation and failure flows of geomaterial using elastic–plastic soil constitutive model. Int. J. Numer. Anal. Methods Geomech. 2008, 32, 1537–1570. [Google Scholar] [CrossRef]
- Tang, X.; Xie, J.; Xie, H.; Zhang, H. Predictions of three-dimensional contact stresses of a radial truck tire under different driving modes. Adv. Mech. Eng. 2022, 14, 16878132221092346. [Google Scholar] [CrossRef]
- Cho, J.; Kim, K.; Yoo, W.; Hong, S. Mesh generation considering detailed tread blocks for reliable 3D tire analysis. Adv. Eng. Softw. 2004, 35, 105–113. [Google Scholar] [CrossRef]
- Tire Maintenance Manual. 2008. Available online: https://www.yumpu.com/en/document/view/6897894/tire-maintenance-manual-goodyear-off-the-road-otr (accessed on 1 June 2022).
- Maknickas, A.; Ardatov, O.; Bogdevičius, M.; Kačianauskas, R. Numerical characterisation of car tyre deflections due to overload. AIP Conf. Proc. 2022, 2425, 290007. [Google Scholar] [CrossRef]
- Solidworks. [Computational Software]. 2020. Available online: https://help.solidworks.com/2020/english/SolidWorks/cworks/c_Nonlinear_Dynamic_Studies.htm (accessed on 1 June 2022).
- Mooney, M. A theory of large elastic deformation. J. Appl. Phys. 1940, 11, 582–592. [Google Scholar] [CrossRef]
- Erdogan, G.; Alexander, L.; Rajamani, R. Estimation of Tire-Road Friction Coefficient Using a Novel Wireless Piezoelectric Tire Sensor. IEEE Sens. J. 2011, 11, 267–279. [Google Scholar] [CrossRef]
- Solidworks. [Computational Software]. 2020. Available online: https://help.solidworks.com/2020/english/solidworks/cworks/c_solid_mesh.htm (accessed on 1 June 2022).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part | Material | Elastic Modulus, MPa | Poisson Coefficient |
|---|---|---|---|
| Rim | Aluminium | 69,000 | 0.33 |
| Elastic sub-layer | Composite | 200 | 0.394 |
| Base | Road surface | 4800 | 0.28 |
| Internal Pressure, MPa | |||||||
|---|---|---|---|---|---|---|---|
| 1.8 | 2.0 | 2.2 | Load, kN | ||||
| Direction | x | z | x | z | x | z | |
| skewness | 0.0132 | 0.0179 | 0.0211 | 0.0127 | 0.0219 | 0.0098 | 4 |
| asymmetry | 1.101 | - | 1.092 | - | 1.089 | - | |
| asymmetry | 0.979 | - | 0.985 | - | 1.015 | - | |
| skewness | 0.0004 | 0.0193 | 0.0144 | 0.0246 | 0.0148 | 0.0255 | 6 |
| asymmetry | 1.070 | - | 1.068 | - | 1.064 | - | |
| asymmetry | 1.105 | - | 1.084 | - | 1.071 | - | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maknickas, A.; Ardatov, O.; Bogdevičius, M.; Kačianauskas, R. Modelling the Interaction between a Laterally Deflected Car Tyre and a Road Surface. Appl. Sci. 2022, 12, 11332. https://doi.org/10.3390/app122211332
Maknickas A, Ardatov O, Bogdevičius M, Kačianauskas R. Modelling the Interaction between a Laterally Deflected Car Tyre and a Road Surface. Applied Sciences. 2022; 12(22):11332. https://doi.org/10.3390/app122211332
Chicago/Turabian StyleMaknickas, Algirdas, Oleg Ardatov, Marijonas Bogdevičius, and Rimantas Kačianauskas. 2022. "Modelling the Interaction between a Laterally Deflected Car Tyre and a Road Surface" Applied Sciences 12, no. 22: 11332. https://doi.org/10.3390/app122211332