1. Introduction
The current transportation system has many shortcomings. These include a higher carbon footprint, socioeconomic inequity, longer travel times, and a detrimental impact on air quality. Transportation is critical for a civilization to thrive and prosper. It offers access to healthcare, education, jobs, and other services critical to human well-being and consumption. As a result, many approaches are being investigated to make transportation more sustainable, greener, and future-ready. This has led to exploring various mobility concepts, such as mega urban micro-transit and mobility as a service (MaaS), to reduce the harmful elements associated with transportation [
1].
Integrating many modes of transportation into a single mobility service that is available on-demand from origin to destination is known as Mobility as a Service (MaaS). The many modalities of transportation can be combined while concentrating on the needs of an individual. Such a system can result in many complications for users and greater impedances for the mode interchanges in the mode and route choice modelling. This new mobility form was initially proposed based on the findings of the Swedish GO:SMART project and research at Alto University [
2], and UbiGo. This is an alternative to typical user mobility based on automobile ownership. Mobility is just a commodity the user purchases to complete his intended travel and accomplish the planned activity. It is effectively a chain of steps. Each chain starts at the trip origin, with handover occurring between different modes at each stage [
3].
The last handover occurs for the last travel section leading users directly to their destination. This last handover is called the Last Mile delivery Service (LMS). It is the most critical part of the mobility-as-a-service concept and is one of the critical touchpoints of this futurist mobility concept. To date, it is proving to be a significant challenge to design and model MaaS for the present and future urban living spaces, especially at the end of the journey. Global urbanization is the driving force behind the LMS. Urbanization is the tendency of more people to move towards urban regions and megacities. By 2050, big cities will house 70% of the world’s population, or nearly 6.3 billion people [
4]. This is expected to change the landscape of the cities. The way people live and move around is expected to change drastically. Hence, it is essential to embark on a pathway of taking better ownership of the roadways for all stakeholders, including vulnerable road users.
A better understanding, modelling, and design of the LMS can significantly help decongest urban areas, as more expansive areas will be accessible for residents and shoppers. New shopping districts/centres have sprung up in the past decade, which has led to a change in shopping habits from the traditional high street to more systemized globalized shopping patterns in the form of mega shopping centres. Some of these entities have excellent transportation connectivity, which is critical for successful business development. These may have their own bus station, parking or even a train station. Such a centre can be spread over miles, with multiple car parks. The proximity to the transportation system drives the market potential of a particular commercial space. The same can be valid for a residential area. This has sometimes resulted in social inequity within the general population, as areas with better connectivity can access the services better while paying the price equally for the bad air quality and traffic congestion. Therefore, a proper last-mile delivery system must be explored. As the present problems cannot be solved through the thinking that created them, an out-of-the-box solution must be explored. Such a system should not pollute the environment, provide accessibility, and be based on technological advancements. This system can be a critical steppingstone for a smart, sustainable, and green transportation system.
In smart cities, the shared economy is expected to emerge as a sustainable consumption model, promoting servicing rather than traditional car ownership [
5]. Modelling for future-ready smart cities is further complicated by the concepts of shared living/living streets, which are being promulgated to improve urban living and social interactions, both with the built environment and the associated geographies. Bicycles are being explored in the LMS literature with the broader MaaS. These include studies on bicycles in Belgium (Antwerp) [
6], Austria (Vienna) [
7], and the UK (Cambridge) [
8]. The fundamental advantage of such bike networks is that they may reach users even in places with restricted access, such as pedestrian zones and regions with limited parking [
7]. Another advantage is that, compared to other modes, these tend to improve the required degree of physical fitness. Therefore, such a system can lead to a sustainable transportation system, and an improved healthy lifestyle for the user.
In the current literature, the last mile delivery is primarily focused on providing e-commerce logistic support. The COVID-19 pandemic has enhanced this need. However, this should not let us lose sight of the potential benefits of the LMS in providing intelligent, sustainable, and greener mobility. Such mobility form can ensure that our cities are future-ready, and those future generations can continue to reap the benefits of globalization while minimizing its associated harmful impact. Consequently, given how swiftly and unpredictably last-mile logistics are evolving to meet customer demand for on-demand logistic systems, transportation planners must develop quantifiable network indicators. The age of the bicycle rider is a crucial criterion influencing a rider’s safe infrastructure use. A trip maker’s route selection is influenced by both personal attributes and the behaviour of other road users [
9]. Personal characteristics include age, gender, and experience [
10]. Pucher and Buehler (2008) promoted cycling for the future by urging that cycling be made safe, convenient, and feasible for people of all ages and genders, while building a case for American municipalities to learn from European countries and embrace cycling [
11]. The naturalistic investigation of cyclists discovered that the rider’s age group directly impacts the safe use of the infrastructure. The naturalistic investigation conducted on British roadways [
12] revealed that motorists exhibit behavioural sensitivity to the appearance of bicyclists. As a result, age is commonly documented in the literature as a crucial road safety variable for cyclists, which functions in conjunction with cyclist flow and other road users’ behavioural sensitivity to affect safety in terms of crash frequency and perceived safety. Therefore, the research aims to develop a green intelligent real-time learning framework for the last-mile delivery of mobility as a service, based on a user’s safe infrastructure usage. This aim will be achieved through the following set of objectives:
- (a)
Develop an intelligent real-time learning system for the delivery of the last-mile delivery
- (b)
Develop a hybrid methodology that can model the safety of a particular bicyclist.
- (c)
Create a predictive dynamic safety model that includes age as an output variable.
- (d)
Develop a statistical variable interaction model for a rider’s age and safety.
Through a hybrid approach integrating statistics and supervised machine learning techniques, a knowledge-driven solution based on the specific user rather than generalized safe mobility practices is suggested. One of the most important aspects influencing travel mode and route selection, and safe infrastructure use, is the age of the user (see [
13,
14,
15]). Still, relatively few studies deal with such modelling or the learning system.
The envisioned learning system will include both hardware and software components. Consequently, a hybrid system will be developed that can continually gather data and model it to provide policymakers/city planners with the final needed output that is ready to use. A proactive strategy like this is necessary to achieve the 2030 goal of zero road traffic deaths and to chart a route toward a future-ready, sustainable, integrated transportation system. Intelligent embedded systems must be integrated into transportation research and practice. The suggested intelligent real-time modelling system is explained in the following section, followed by findings and discussion in
Section 3, and conclusions in
Section 4.
2. Proposed Intelligent Real-Time Modelling System
This section details in great depth the proposed real-time intelligent learning system. It primarily consists of four units: (a) Input Learning Unit (ILU): which continuously collects data in real-time from a variety of sources; (b) Safety Predictive Toolkit (SPT): which develops predictive models that can predict safety in real time; (c) Variable causation Processing Unit (VPU); and (d) Last-Mile service Delivery Unit (LMDU): consists of a Route Choice Unit (RCU), and a Mode Choice Unit (MCU).
2.1. Input Learning Unit
The input learning units consist of automatic data collection units that continuously take data from a series of platforms: (a) Police database to access the crash database, (b) TRAffic flow Database System (TRADS) to access the data from traffic cameras and counters, (c) UK Department for Environment, Food and Rural Affairs (DEFRA), for lighting data, and (d) Urban observatory Newcastle for meteorological data. All the data are combined in a single base file used as input by the further consecutive units.
2.2. Safety Predictive Toolkit (SPT)
After a base input file was constructed, the associated dataset noise was first removed before proceeding toward data analysis. Safety Predictive models were constructed in this toolkit by modelling the selected input variables from the literature and mapping them with the desired output variables (
Table 1). Such grouping of the output variables is the recommended division by the Department for Transport (DfT). The modelling was performed through the neural network classifier and deep learning. The input base file was randomly divided in the ratio of 6.5:3.0:0.5 for Training: Validation: and Testing. This division is advised for the network to develop accurate prediction characteristics. This division guarantees that the network has enough data to learn correctly, evaluate the trained model, and apply the models developed to untrained scenarios. The Bernoulli distribution assures that the data are randomly distributed. Four types of input variables were used for constructing the predictive model: (a) Infrastructure, (b) Spatial, (c) Personal attributes, and (d) Environmental variables.
Twelve infrastructure variables were used for modelling: (a) road type, (b) type of intersection, (c) type of junction control, (d) vehicle manoeuvre—the manoeuvre that the rider was executing or purposefully conducting at the moment of the crash, (e) speed limit, (f) carriageway hazard, (g) vehicle junction location, (h) road location of the vehicle, (i) skidding and overturning, and (j) special site conditions (any infrastructure defects at crash location). At junctions, the rider may be compelled to transfer from one hierarchical level of road classification to another. Hence, two further variables were used for modelling: (k) first road class, and (l) second road class. There were four spatial variables used as input variables. These were (a) hour of the crash, (b) day of the crash, (c) month of the crash, and (d) total number of vehicles involved in the crash. The hour, day, and month of the crash were used as lurking variables to represent the traffic flow conditions. Three personal attributes were used: (a) rider gender, (b) breath test, to check whether the rider was intoxicated during the crash, and (c) purpose of the journey undertaken when the crash occurred. Three environmental variables were used for modelling: (a) prevalent lighting conditions, (b) prevalent meteorological conditions, and (c) meteorological road surface conditions.
The proposed learning system tried to mimic the working of the human brain. A multilayer learning system was developed, with two hidden layers between the input and output layers. The backpropagation algorithm-based four-step iterative learning process was used to map the selected input with the output variables.
Step 1: To begin, random weights were assigned to each layer neuron, and activation functions were employed to transmit signals between different layers.
Step 2: The second phase was error modelling. The cross-entropy error function simulated the difference between the output of random weights and the desired output.
Step 3: The first randomly modified synaptic weights were adjusted in the third step: Based on the error computed in step 2, the initially randomly assigned synaptic weights were adjusted. The backpropagation algorithm was used to achieve this modification.
Step 4: The preceding stages were iterated indefinitely until the maximum number of iterations (epochs), or minimal training error change was reached.
The network structure is explicitly described in
Table 2, with the set-out parameters used in the deep learning and neural network classifier. The model was trained by repeatedly exposing the model to input and output samples and modifying the weights to reduce the model’s output error compared to the predicted output. The stochastic gradient descent optimization algorithm was used for this.
2.3. Variable Causation Processing Unit (VPU)
The critical variables in the data learning model were determined through variable importance and normalized importance of each variable concerning the most crucial variable. This was achieved through sensitivity analysis and deep learning. The Boolean logic then followed, presenting the outcome in the form of the single most critical variable impacting the safety of a specific group.
2.4. Last-Mile Delivery Unit (LMDU)
For the last-mile delivery, the results were inputted into diggimap software to select the safest infrastructure and google maps (developed API) for the final correlation. Then, the final route for the last-mile delivery was selected. This was based on the safest route determined by a combination of input variables of variable environmental conditions, infrastructure variables, traffic flow conditions, and rider personal attributes.
A unique hardware system was used for modelling. The hardware included a wireless connection and 128 gigabytes of internal memory. Future studies should look at using the specific processor for the learning system.
2.5. Applied Area
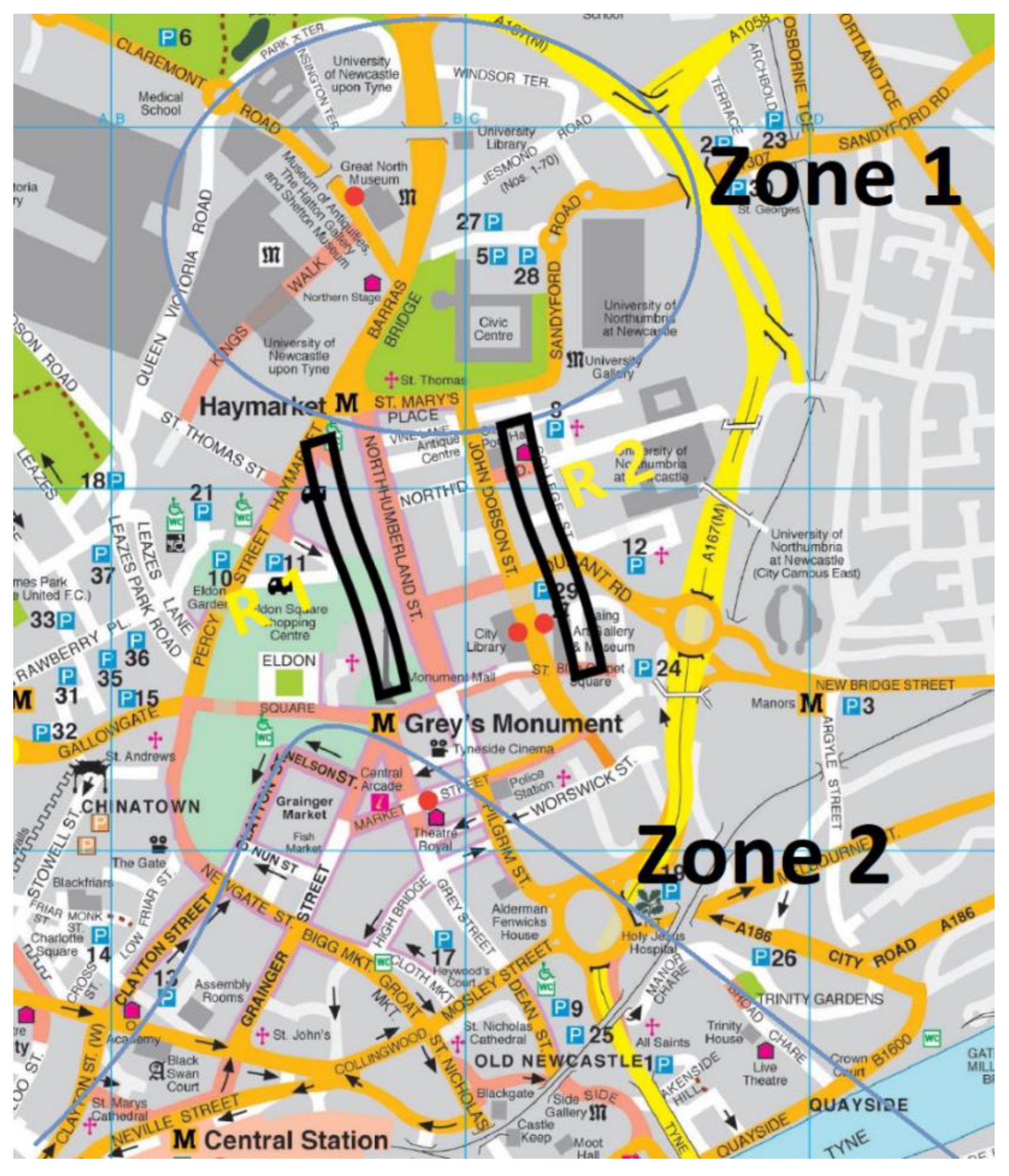
The learning system must be applied in a real-life scenario, as the aim was to develop a system that was applicable and can be used simultaneously by both practitioners and theorists. Hence, the system was applied to the Northeast of England after the theoretical development and evaluation were performed. In the first step, partnerships were formed with the city council, the Department for Transport (DfT), the Department for Environment, Food, and Rural Affairs (DEFRA), and the local observatory. Lighting, collision information, traffic cameras, and counters were accessible and modelled due to such collaborations. The research area’s flow characteristics were gathered via the TRAffic flow Database System (TRADS) by accessing traffic cameras and counters (
Figure 1). For each crash, the precise coordinates were collected and used as input to acquire the relevant infrastructure characteristics. Digimaps is a research group-accessible online map and data delivery service run by EDINA at the University of Edinburgh. This platform was used to collect information on infrastructure based on specified coordinates. It provides realistic infrastructure maps that show current and historical situations. This approach assured that correct infrastructure characteristic were used for modelling based on the temporal conditions of the accident rather than the current conditions. The DEFRA data were utilized to input precise meteorological and illumination conditions. These sensors continuously send data into the learning system, transmitting it as a consolidated base input file.
4. Conclusions
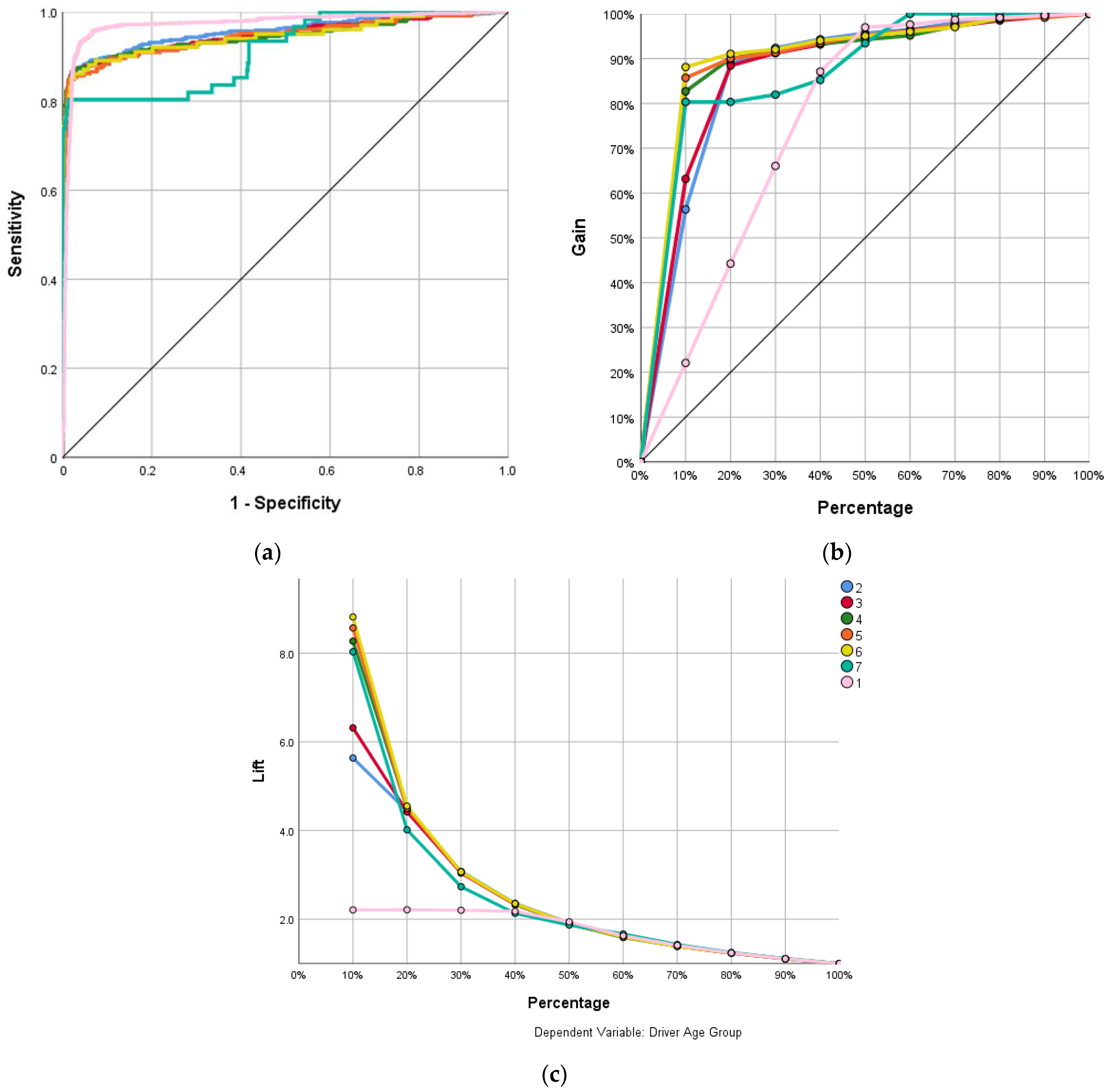
In this paper, an intelligent real-time learning framework for the last mile delivery of mobility as a service based on safe use of infrastructure by users. A proposed intelligent real-time modelling system was proposed and applied to the Northumbria region of England’s northeast. It consists of four units; (a) Input Learning Unit (ILU), (b) Safety Predictive Toolkit (SPT), (c) Variable causation Processing Unit (VPU), and d) Last-Mile service Delivery Unit (LMDU). A knowledge-driven solution based on the specific user rather than generalized safe mobility practices were used for modelling. This was achieved through a hybrid approach integrating mathematics and supervised machine learning techniques. A predictive dynamic safety model was developed, and the interaction of various variables affecting a rider’s safety for the last-mile delivery was modelled. Users’ characteristics of age, which influence mode and route selection, were simulated.
The real-time intelligent learning system was applied as a case study on the northeast of England. The learning model’s average distinguishing power to reliably predict the riskiest age group was 95%, with a standard deviation of 0.02, suggesting a strong prediction accuracy across all age groups. According to the results, different infrastructural networks represent varying risks to riders of various ages. The rider’s age impacts how other road users engage with them. The regional diversity in trip intent and traffic flow conditions were significant elements influencing the safe use of infrastructure for a specific age group. Through the application of the route choice toolkit, on the Newcastle city centre, it was found that cyclists do not only consider the minimum path algorithm. The important elements influencing cycling route choices include perceived safety, lighting circumstances, meteorological conditions, degree of separation, traffic flow, pedestrian conflicts, cyclist flow, and unique infrastructure characteristics.
The study’s findings can significantly influence road legislation, design, and planning. The rider’s age and interaction with the infrastructure under varying traffic flow, environmental, lighting, and meteorological conditions were important factors influencing a cyclist’s safety. These findings provide further encouragement for choosing the last-mile route. The time difference will be merely a few seconds or at most a couple of minutes because of altering the route. However, this can significantly increase both perceived and actual safety. This can be crucial for mode selection and creating confidence in using a bicycle as a means of transportation. The constructed model, which integrated the rider’s fragility, sensitivity to externalities, and the varied safety impact dependent on its features, may even be used for infrastructure that is still in the planning/design phase. This work provides an in-depth understanding of the last-mile sustainable delivery of MaaS, which can be integrated into the presently researched concept of smart cities, mobility hubs, and fifteen-minute cities. It is envisaged that this research would aid in adopting sustainable (green) transportation options and the last-mile delivery of mobility as a service. Future work should aim to uncover the sensitivities of a rider from different countries and make a baseline comparison scenario.








{kind=link}
{kind=link}
{kind=link}
{kind=link}