1. Introduction
Basic human car-following behavior and its impact on traffic stability have been studied extensively in various contexts [
1,
2,
3,
4]. Automated driving technologies, mostly aiming at safe maneuver and rider comforts, have received increasing attention in recent years. Automation can partly alleviate the stress of a driver who requires a high level of concentration for driving explicitly in dense traffic. One of the key functionalities of any driving automation system is to regulate the gap with the preceding vehicle. Adaptive cruise control (ACC), which is such a commercially available automation technology equipped in most existing high-end cars, can dynamically control the vehicle speed and maintain a safe gap. Vehicles with ACC can provide smoother driving with less acceleration variation that directly enhances driving comforts and environmental benefits [
5]. ACC has the potential to improve driving behavior, ameliorate fuel consumption, and provide driver comfort through in-vehicle driver assistance [
6].
The principal objective of ACC is to offer driver assistance by adjusting both the throttle and brake of a vehicle within the restricted acceleration range in a high-speed (e.g., above 40 km/h) driving environment. Recent research on ACC is more focused on the extended range of driving (e.g., stop and go traffic) [
7,
8] and enhancing the efficiency of traffic flows [
9,
10,
11]. By setting the parameters of ACC, e.g., time gap, it is possible to improve traffic flow capacity and performance. In particular, using bi-directional sensing with inter-vehicle communication, cooperative ACC, called CACC, can control vehicles in a platoon by keeping a short time gap between the pairs of vehicles and improving traffic capacity significantly [
9,
12,
13,
14,
15]. CACC can be implemented only when a group of dedicated vehicles with connectivity closely move on the same lane and share the same route without the interference or mixing of traditional vehicles. The prospects of CACC are further limited in heterogeneous traffic as the formation of a platoon or resizing a running platoon by incorporating diverse types of vehicles is technically not feasible. For these reasons, CACC has never been implemented on commercial cars, except for some limited experimental purposes [
16,
17,
18]. Recent research on ACC or car-following schemes using the connectivity of automated vehicles received tremendous interest. A major part of such research introduces connectivity features to develop an enhanced car-following scheme using modified human car-following models [
19,
20,
21]. A robust car-following control strategy is presented considering uncertainty and communication delay [
4]. Although research on such connectivity-based driving is necessary for future transportation systems, research related to existing automated car-following technology or ACC found on commercial cars is very limited [
22,
23].
Basic ACC studies focus on different spacing or time gap policies for individual vehicles without cooperating or communicating with the other vehicles. Several works examined the impacts of ACC-equipped vehicles (or simply, ACC vehicles) with adaptive time gaps on traffic flow at their various penetration rates [
9,
11,
12,
24]. The operating ranges of some commercial ACC are limited to moderate to high speed, e.g., above 40 km/h. ACC often needs to be deactivated when the preceding vehicle brakes sharply unless a very conservative spacing is used [
5,
22]. Furthermore, vehicles with such ACC are not always energy efficient, and they may cause shock waves or congestion due to the presence of disturbances in dense traffic. The offline multi-objective optimization technique was used to optimize parameters in order to have a suitable trade-off between safety and performance objectives [
25]. These ACCs are unable to finetune their driving behavior dynamically by considering the changing trends of the traffic ahead; therefore, their performances are affected greatly in transient conditions.
Various advanced automated vehicle control systems, e.g., MPC, have been investigated recently to overcome the limitations of traditional driving or ACC [
10,
26,
27,
28,
29]. Comfortable and efficient driving behaviors can be realized by anticipating the traffic ahead using information via inter-vehicle communication and taking appropriate control action to drive a vehicle smoothly and improve traffic flows [
30,
31]. In these MPC-based driving systems, using the predicted state of the preceding vehicle, an optimization problem is solved to obtain the control input of the vehicle. Hence, the solution provides anticipatory car-following behavior that improves the driving efficiency of a vehicle by dynamically tuning spacing and speed.
In contrast to these advanced vehicle control, traditional ACC decides the vehicle control input according to the current state of the preceding vehicle; therefore, the vehicle cannot avoid aggressive braking often in varying traffic flow conditions [
10,
22]. Due to high computational cost and complexity in obtaining reliable solutions, MPC is not easy to implement on vehicles despite a potential comfort gain for the driver and environmental benefits. Therefore, the use of these advanced driving systems remains limited mostly in theoretical and simulation studies. Despite being a decades-old technology, none of the existing ACC found on commercial cars uses the advanced optimization-based decision technique. A very recent experimental study on seven different 2018-model-year vehicles with ACC reveals that none of these vehicles are even string stable, i.e., the ACCs can operate the vehicles only at steady speed above some high level and need to be deactivated in complex maneuvers [
32].
Pointing out the potentials and limitations of the predictive optimal control schemes, a simple look-ahead car-following scheme using the intelligent driver model (IDM) [
33] was proposed that takes control decision by predicting the behavior of the preceding vehicle [
34]. A detailed investigation has been conducted recently by applying such a look-ahead car following with the existing driving schemes to observe their impacts on the fuel consumption, the overall traffic flow, and utilization of the intersection at various penetration rates [
35]. In the context of signalized intersection and low-speed driving on the urban roads, the model of commercial ACC with such a look-ahead scheme does not perform well due to its frequent and long deactivation periods. Therefore, how anticipatory driving features influence the operating scope and the performance of existing ACC on the freeway with designed operating speed have not been investigated yet.
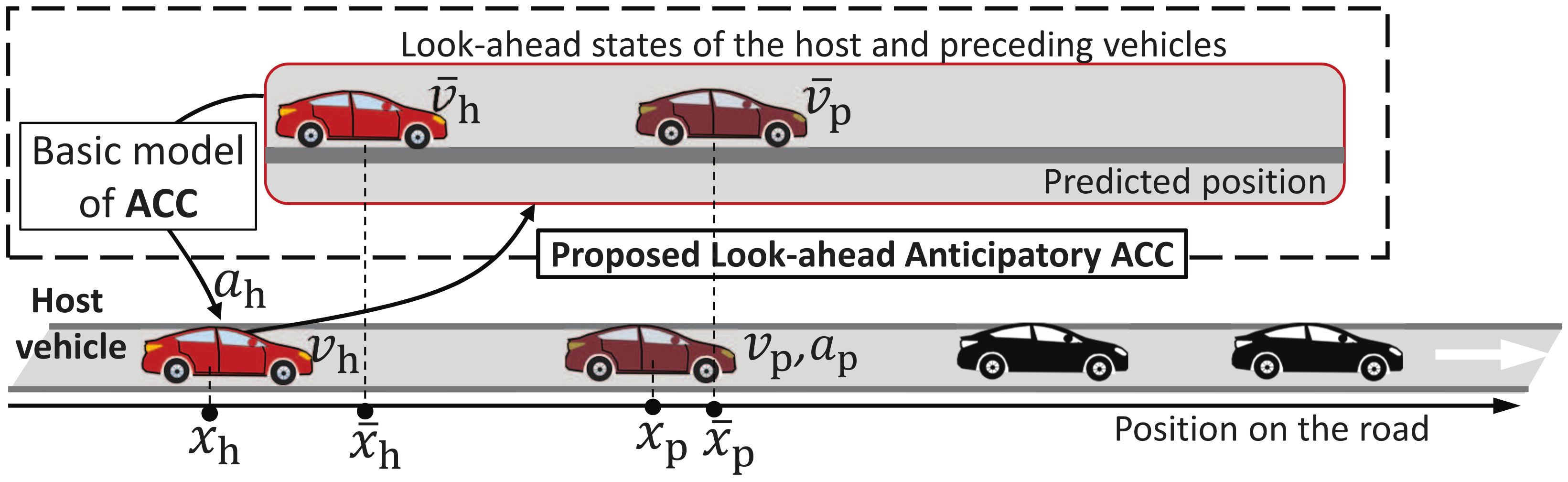
This paper presents a look-ahead scheme of ACC by extending the decision process of an existing ACC available on commercial high-end cars. In the context of freeway driving, the future position and speed of the preceding vehicle after a short period are predicted using a conditional persistence prediction technique and then used to decide the control input of the vehicle by using the model of a commercial ACC that was calibrated using experimental driving data [
22]. Although the look-ahead feature of the proposed ACC is inspired by the MPC-based driving scheme, it completely differs from MPC in the sense that the driving decision is taken in real time using parametric functions instead of rigorous numerical optimization. Therefore, the main contribution is the look-ahead framework that connects prediction and decision-making procedures to the existing ACC employing parametric functions (i.e., without involving numerical optimization) for real-time computation to provide a partly similar behavior pattern of the MPC schemes to some extent. A time-varying prediction horizon and the conditional persistent prediction technique were introduced to keep the look-ahead predicted states reliably accurate despite varying traffic conditions.
The proposed ACC is implemented in a moving horizon fashion, where the control decision is taken considering a look-ahead horizon, but the process is repeated at a small-time step that is a fraction of the horizon. Such feedback features enable the ACC to adapt to the actual traffic conditions timely. Furthermore, this look-ahead technique can be used with any ACC reviewed above to enhance their ability to cope with the varying traffic conditions by taking early anticipatory action. At first, the ability of the proposed ACC in improving driving behavior is observed by measuring a typical driving performance index that is usually used in an optimal driving system. Next, it is evaluated on a group of vehicles in changing situations of dense traffic, where the preceding vehicle accelerates or brakes at different magnitudes. Finally, using an experimental setup in AIMSUN microscopic traffic simulator, the influences of a small percentage of vehicles with the proposed ACC on the overall traffic are evaluated on a freeway. From these evaluations, the potential benefits of the proposed ACC over the original ACC have been investigated.
The structure of this paper is as follows. The next section briefly reviews the vehicle dynamics and traditional ACC and describes the proposed look-ahead scheme of ACC.
Section 3 includes the evaluation settings and describes the evaluation results in three different test scenarios. Finally,
Section 4 concludes the contributions of this paper.
3. Evaluation of the Proposed La-ACC
By using microscopic traffic simulation, the proposed La-ACC is evaluated, and its performances for controlling multiple vehicles in typical freeway congested traffic are compared with the existing ACC as described in
Section 2.1. Most parameters are kept the same as that of the original ACC, and they are directly taken from [
22,
23]. In particular, maximum acceleration and braking are set at 2 m/s
2 and −4 m/s
2, respectively. The parameters
and
are determined by applying sensitivity analysis by balancing both performance enhancement and oscillation suppression in transient situations. A long look-ahead horizon (more than the usual time gap of a driver or driving system) may cause speed oscillations of the vehicle in transient traffic conditions. In particular, the typical time gap of ACC, which can be as low as 1 s, and the look-ahead parameters of (
10) are set at
m/s and
. The parameters of the conditional persistent prediction are tuned as
s,
, and
m/s
2, which ensure a mean square speed prediction error of
km/h for the maximum look-ahead horizon of
s based on observation on the experimental driving data of about 8 km of driving [
36]. The maximum speed
is set at the maximum speed limit of the roads. The built-in fuel consumption model in AIMSUN with calibrated parameters based on the Ford Fiesta car, a light-duty vehicle with an internal combustion engine, is used for evaluation in this study [
37].
It is assumed that ACC is deactivated by the driver when the required braking rate exceeds 50% of the maximum braking limits due to the presence of a slow or braking preceding vehicle; subsequently, the human driver takes control of the vehicle. In particular, in this study, we considered IDM+ (
IDM plus, a modified version of IDM) [
38] as the human driver model, which provides better flowing behavior of vehicles in the synchronized traffic, as it was used with ACC in [
23]. When the vehicle returns at a steady condition (with acceleration less than 0.2 m/s
2), ACC is reactivated after waiting for 30 s.
3.1. Evaluation of the Proposed La-ACC on a Single Vehicle
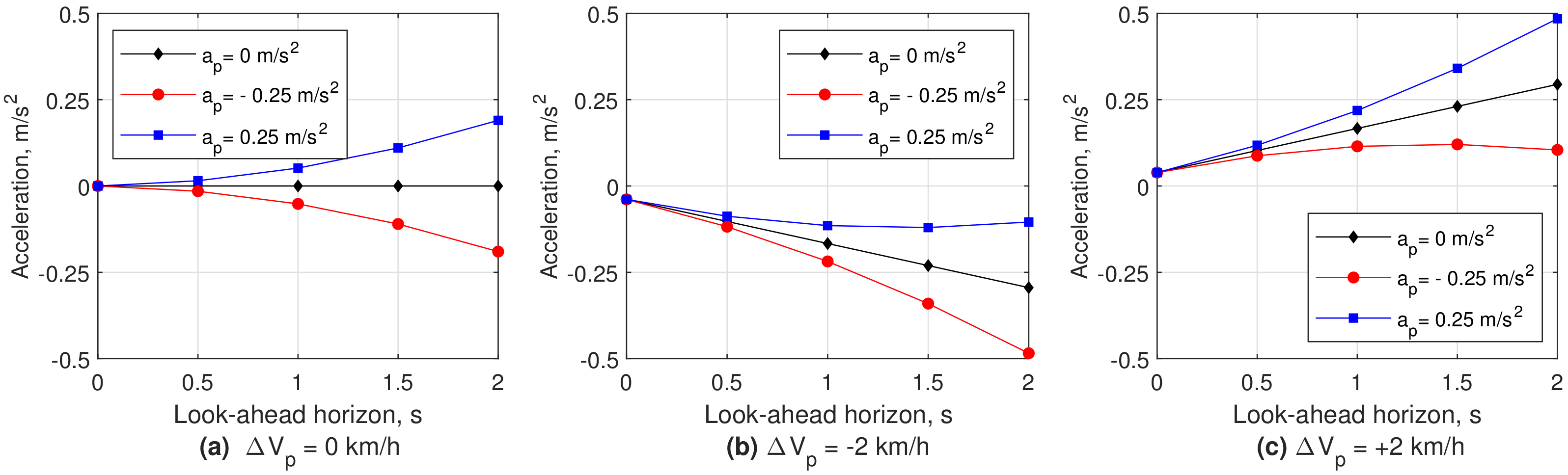
At first, the influence of the maximum look-ahead horizon
on the generated acceleration by La-ACC is observed and shown in
Figure 2. In this observation, the host vehicle is running at a speed of 80 km/h with a gap of 30 m from its preceding vehicle. Three different relative speeds and, for each, three distinct accelerating cases of the preceding vehicle are separately analyzed.
Figure 2a shows the case when both the preceding and host vehicles are running at the same speed of 80 km/h (i.e.,
). For instant acceleration
of the preceding vehicle, i.e., both vehicles are at equilibrium states, La-ACC generates zero acceleration for any look-ahead horizon (i.e., for 0 to 2 sec as shown in the horizontal axis). Note that when the look-ahead horizon
is zero, La-ACC is exactly equivalent to ACC. However, when
or
for the same speed of both vehicles, La-ACC with a longer horizon generates acceleration by aligning to the decelerating/accelerating trend of the preceding vehicle.
Figure 2b,c show similar cases when the preceding vehicle has a relative speed
km/h and
km/h, respectively. Even when
, La-ACC exhibits higher sensitivity than ACC by reflecting the look-ahead states. Often, the speed of a vehicle does not change monotonically in varying dense traffic; therefore, a long horizon may not be suitable for realizing smooth driving.
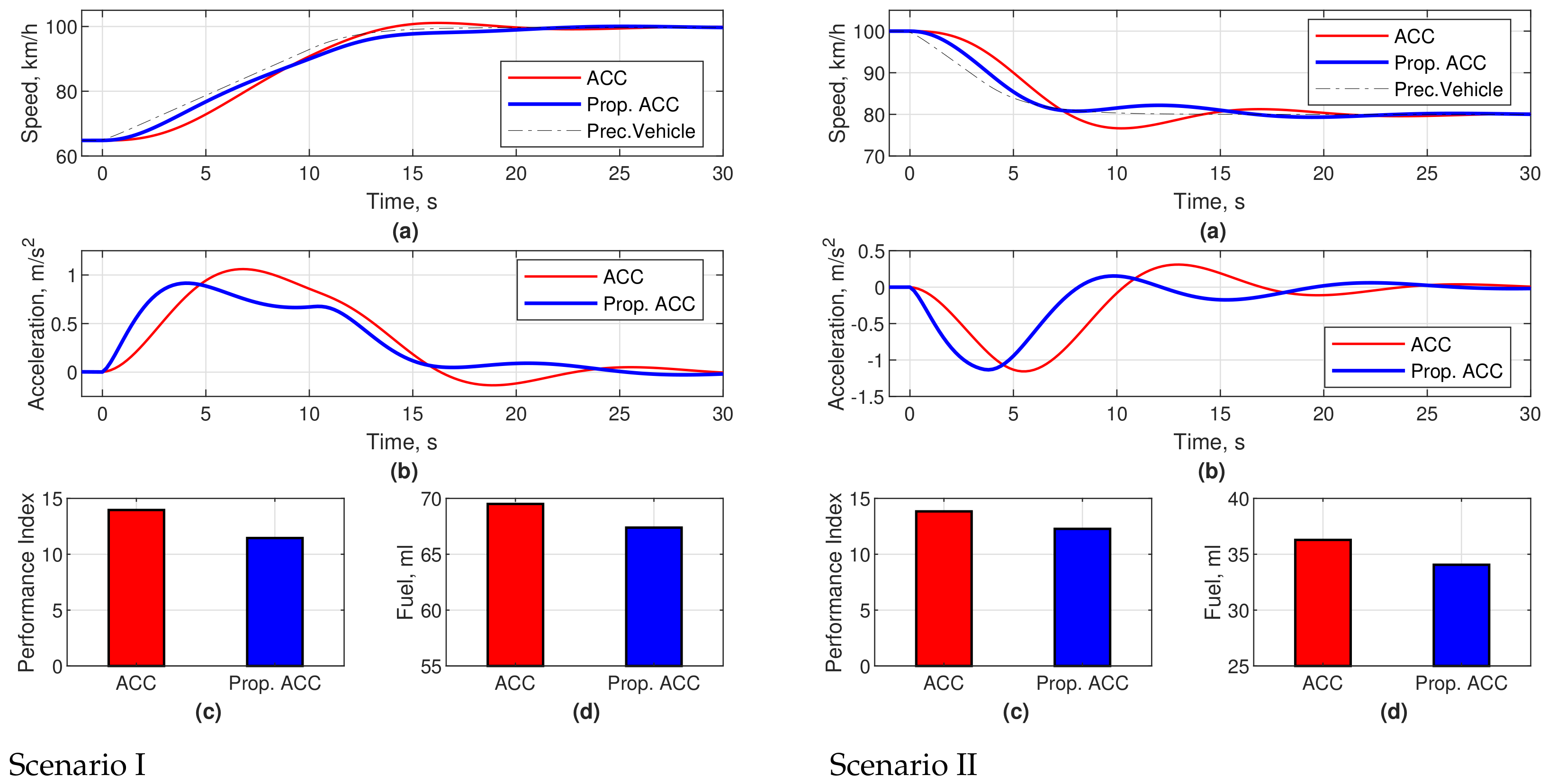
Next, La-ACC with 1 s look-ahead horizon is evaluated by controlling a host vehicle in two typical scenarios, as shown in
Figure 3. In addition, by visualizing the speed and acceleration characteristics of the host vehicle, the quality of driving is also evaluated quantitatively by measuring its performance index and fuel consumption. A typical performance index
, generally employed in the optimal vehicle control problem, is defined as the integral of the weighted driving cost as follows:
for this evaluation of 30 s of driving. The parameters are set as
and
m/s (same as the maximum speed of the preceding vehicle). A low value of
J is desired as it indicates less deviation from the desired speed and low acceleration or braking. Although
J does not include the vehicle’s fuel consumption, the inclusion of the square of speed deviation and the square of acceleration relates
J with fuel consumption indirectly as found from various fuel consumption models, e.g., [
37,
39]. In
Figure 3, Scenario I shows the case when the preceding vehicle speeds up from 65 km/h to 100 km/h in 0 to 15 s, and Scenario II shows the case when the preceding vehicle slows down from 100 km/h to 80 km/h in 0 to 8 s. The instantaneous speed and acceleration characteristics of La-ACC and ACC, taken from independent simulation for the same condition, are shown by red and blue curves, respectively, in each scenario. The speed of the La-ACC vehicle results in less overshoot and converges earlier than the ACC vehicle. For the observed period of 30 s, La-ACC attains a better performance index and lower fuel consumption compared to ACC. Both qualitative and quantitative comparisons indicate the advantages of La-ACC over ACC.
3.2. Evaluation of La-ACC on Multiple Vehicles
A vehicle usually influences the behavior of its followers and sometimes may trigger shockwaves in the following traffic that may eventually turn into a breakdown. Therefore, it is crucial to investigate the relative performances of La-ACC and examine the stability of the vehicles in dense traffic with varying speeds. We have conducted such a study and for a fair evaluation compared the performance with the recent ACC described above.
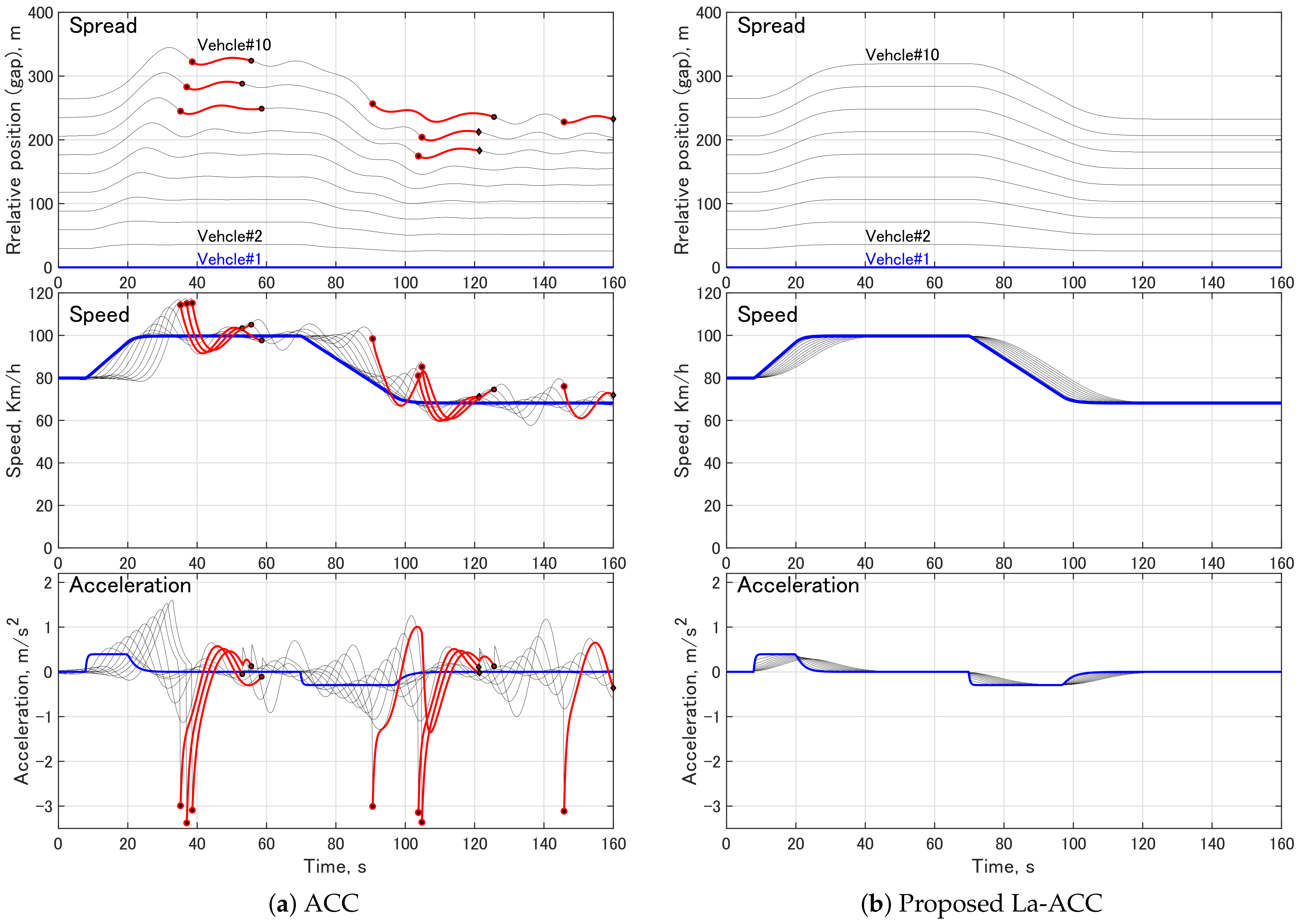
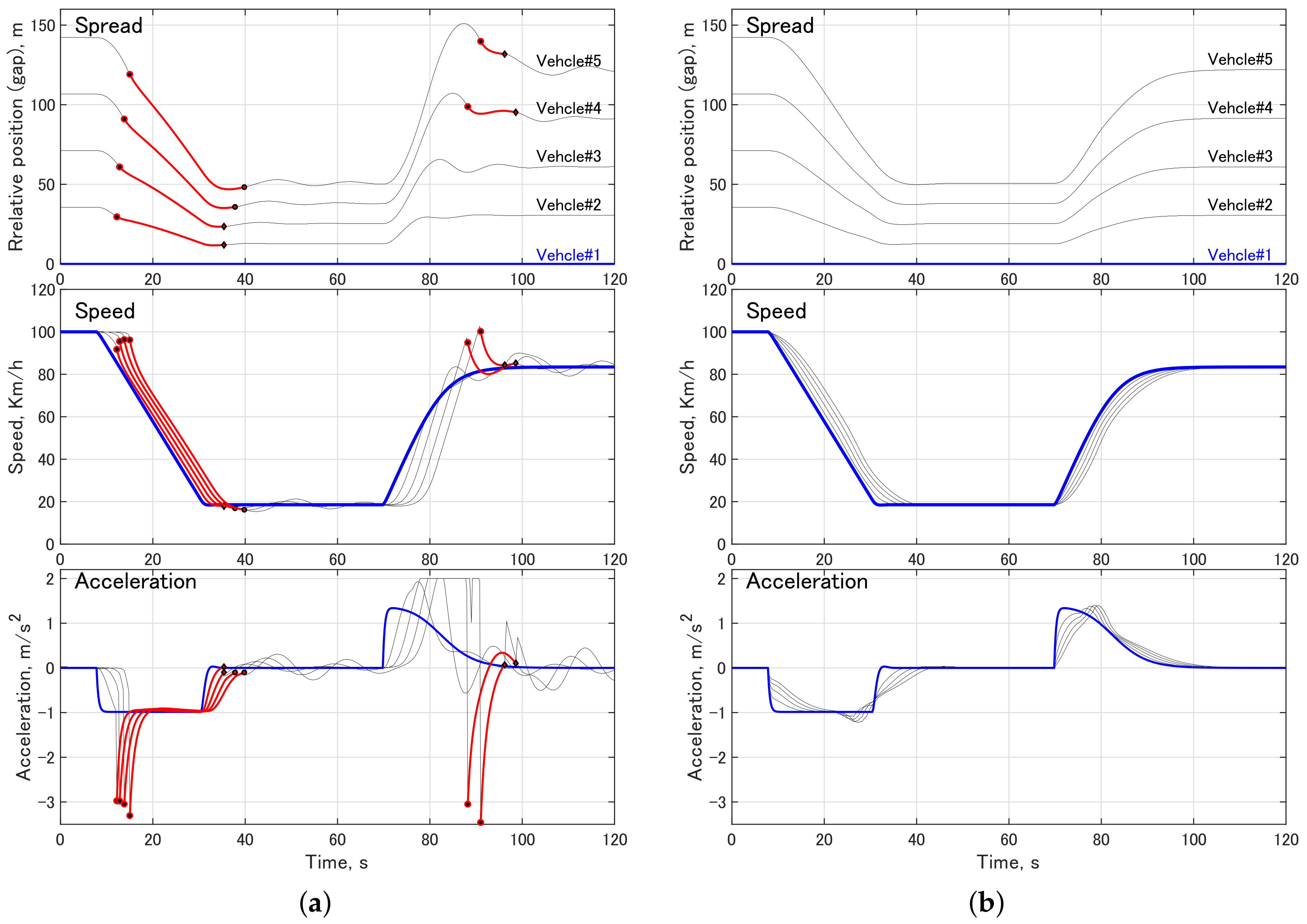
Figure 4a,b illustrate the driving characteristics of a platoon of ten vehicles using ACC and La-ACC, respectively. In each case, the lead (first) vehicle slowly increases its speed from 80 km/h to 100 km/h in 10 s and later slows down to 70 km/h in 30 s. Both acceleration and deceleration are smooth with very low magnitudes (within ±0.4 m/s
). The relative position (the distance from the first vehicle), speed, and acceleration of these vehicles are compared. As in
Figure 4a, the ACC vehicles follow the respective preceding vehicles by causing speed oscillations, which propagate from the second to tenth vehicles. Despite the moderate acceleration of the first vehicle, the eighth to tenth vehicles have to brake aggressively by deactivating ACC temporarily as marked by the red color. These results accord with the results of [
22], where they tested a platoon of five vehicles using ACC and found similar propagation of speed oscillations.
In contrast, the La-ACC vehicles have cautiously followed their respective preceding vehicles and could keep their acceleration limited, as shown in
Figure 4b. For this low magnitude of braking by the first vehicle, the La-ACC vehicles are found fully string table as the magnitudes of their acceleration are never amplified in the following vehicles. Consequently, La-ACC remains activated in the entire driving period, i.e., La-ACC has enhanced the automated driving operating range compared with ACC for the same limits of acceleration and braking.
A similar observation with different levels of acceleration and braking by the preceding vehicle is given in
Appendix A. From these observations, it is clear that our approach ensures better stability of the vehicles, i.e., without a need for deactivation when the leading vehicle changes its speed moderately, resulting in smoother flows of the vehicles with less fuel consumption than the ACC vehicles. However, when the leading vehicle brakes extensively, the La-ACC has to be deactivated similarly to ACC. Therefore, it can be concluded that our proposed approach yields almost the same or better performances compared to the recent ACC in terms of average speed, fuel consumption, and stable operating range.
3.3. Impact of La-ACC Vehicles on Freeway Traffic
Although numerical simulation conducted in controlled scenarios using a few vehicles, as described above, is a typical evaluation approach found in the literature, we consider further evaluation in more realistic traffic using a traffic simulator. Note that experimenting with any driving system by applying on many cars in traffic is not feasible at this point in time.
In real traffic, a vehicle often necessitates braking aggressively, e.g., for cut-in, merging, or any emergency. In such situations, La-ACC may be required to be deactivated too. Furthermore, the estimated acceleration of the preceding vehicle, hence the corresponding look-ahead state, deviates from the actual value found later. Such deviations may affect the performance of the La-ACC vehicle. Considering these facts, La-ACC vehicles’ behavior is investigated in naturalistic traffic using the AIMSUN Microscopic Traffic Simulator [
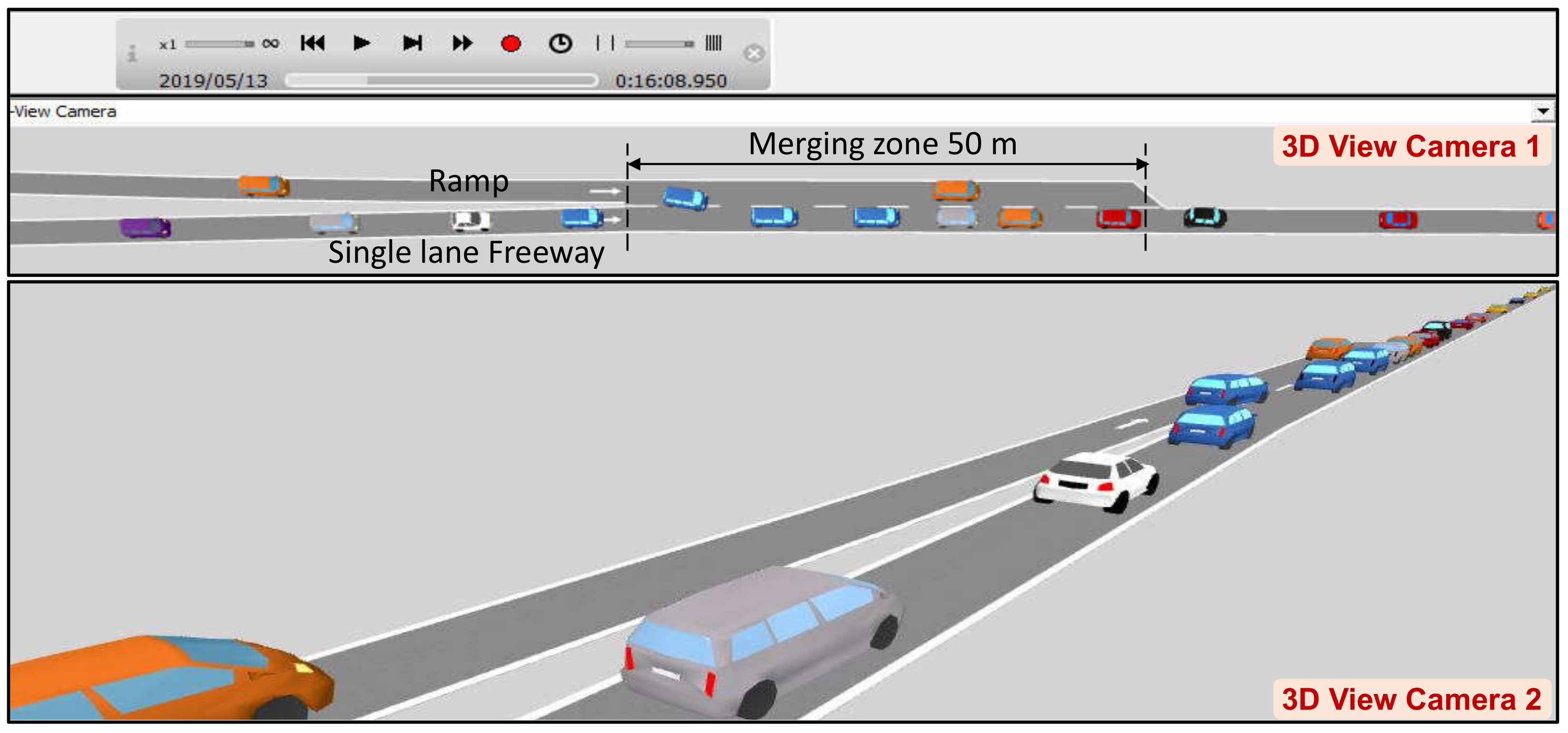
40]. In the simulator, arbitrary vehicles are controlled by La-ACC on a freeway-ramp network with a merging zone of 50 m, as shown in
Figure 5. On the freeway, some vehicles are randomly selected as the host vehicle and controlled by La-ACC. Using an application program interface (API), relevant traffic information from the simulator is obtained to control the host vehicles at every simulation interval of 0.2 s. The incoming traffic on the main road and the ramp is set at approximately 1200 Veh/h and 350 Veh/h, and the desired speeds of the vehicles are sampled from a truncated normal distribution (between 75 km/h to 90 km/h) by the simulator.
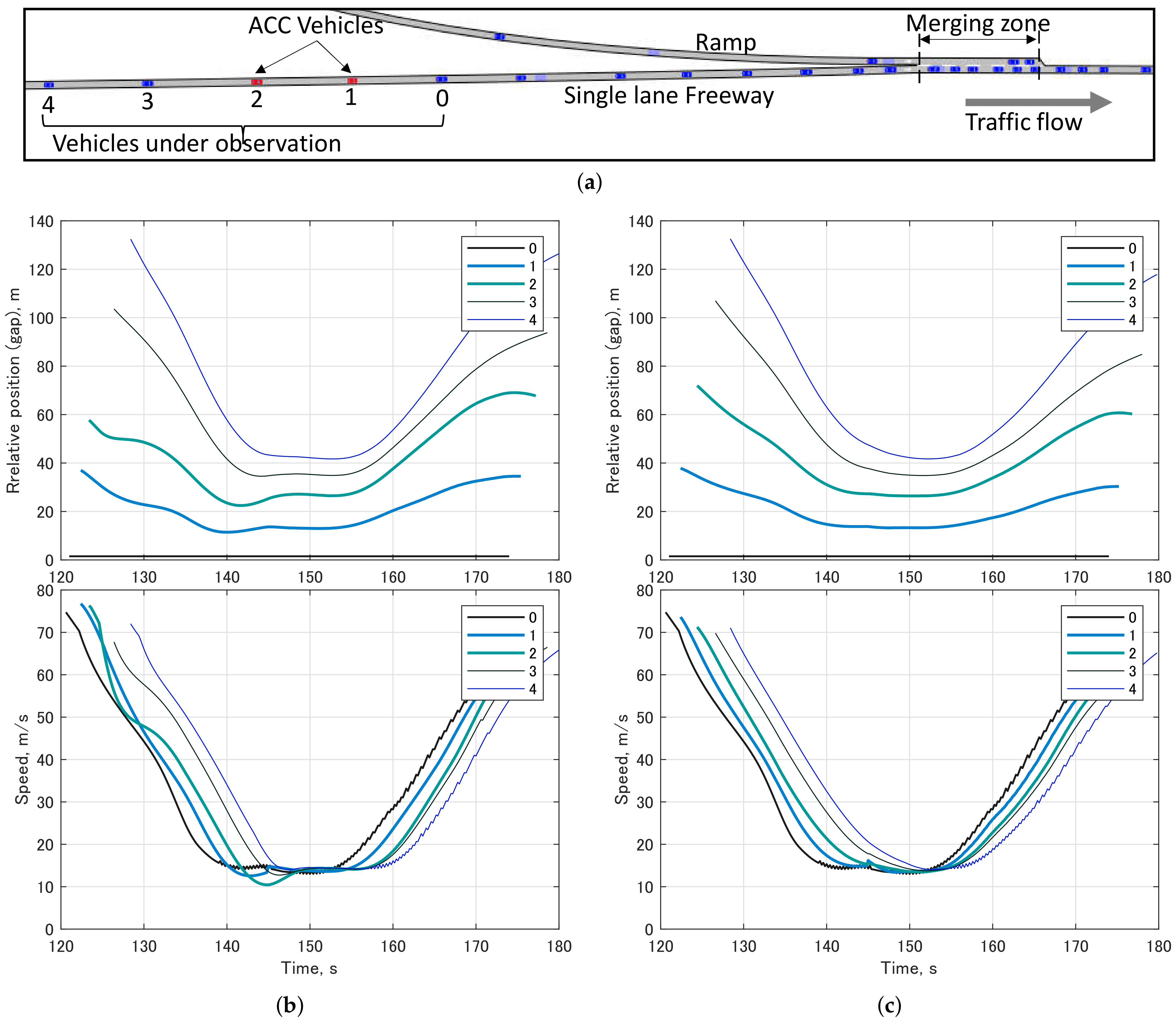
Figure 6a illustrates the initial conditions of five vehicles, where vehicles 1 and 2 are the host vehicles, and the others are human-driven (according to the Gipps car-following model [
1], which is the default control scheme in the AIMSUN simulator). The host vehicles (1 and 2) and their follower vehicles (3 and 4) are observed closely over a distance of 500 m, including 250 m before the merging point and 200 m after the merging zone. With the same aggressive braking behavior of the leading vehicle (vehicle 0) near the merging zone, both the host vehicles are driven by the original ACC and La-ACC in independent simulation, and the corresponding results are shown in
Figure 6b,c, respectively. Both ACCs have to be deactivated as the speeds fall below 20 km/h. However, the vehicles with La-ACC exhibit better speed response than that of the ACC vehicles; consequently, the followers of La-ACC vehicles also improve their speed response while approaching the merging zone.
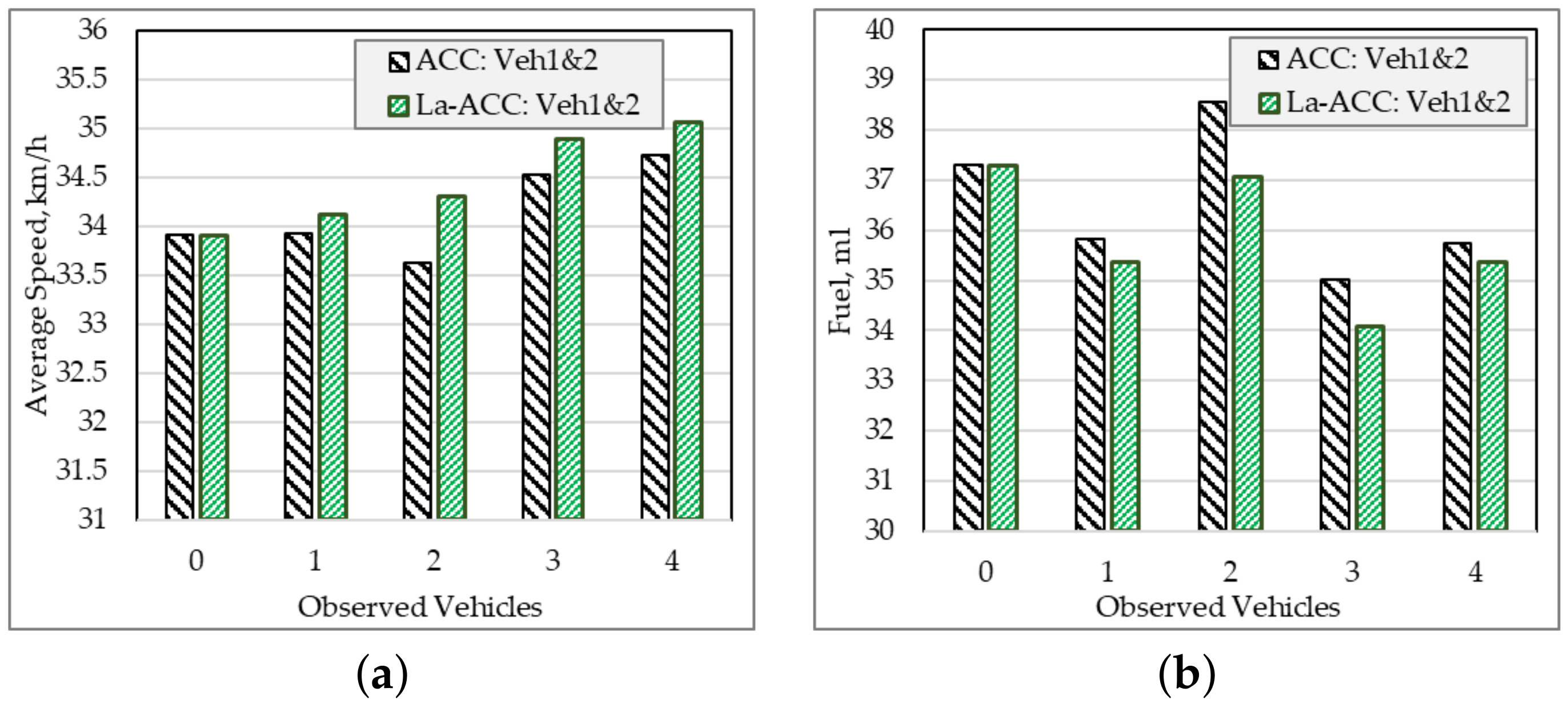
For obtaining a more careful distinction between ACC and La-ACC, the average speed and fuel consumption of these five vehicles are compared in
Figure 7a,b, respectively. Due to the abrupt deceleration of the leading vehicle at the merging zone, the second ACC vehicle (vehicle 2) oscillated its speed (
Figure 6b); consequently, it exhibits the worst average speed and fuel consumption. However, with La-ACC (
Figure 6c), both vehicles 1 and 2 show better average speed and fuel consumption; consequently, their followers, vehicles 3 and 4, also benefit from their behavior.
Finally, the impacts of a small part of La-ACC or ACC vehicles on overall traffic are investigated over a one-hour simulation with the same traffic settings to the network. In this investigation, some vehicles are randomly selected as the host vehicles, and they are driven by La-ACC or ACC in independent simulation. Since ACC vehicles are not string-stable, to avoid high penetration rates of La-ACC or ACC vehicles, the maximum number of the host vehicles is limited to two at a time on the network. Note that approximately 2.3% of vehicles are found to be controlled either by ACC or La-ACC in a one-hour simulation.
Since traffic behavior in a network is uncertain, for a fair comparison, ten sets of one-hour simulations have been conducted independently for each ACC and La-ACC using those vehicles.
Table 1 shows the average performance characteristics obtained from these simulations. From all observed features, it was found that the proposed La-ACC has positive impacts on overall traffic performance compared with ACC. The improvement margins are apparently shallow as the values are averaged for all vehicles traveling through the entire network. The use of La-ACC, instead of ACC on a small part of vehicles, improves traffic density, travel time, and fuel efficiency of the entire traffic system. Traffic delay, harmonic speed, mean queue, and other standard evaluation items are provided by the statistic generator of the AIMSUN simulator, and their computation methods can be found in the dynamic simulator manual of AIMSUN.
4. Discussion
This paper has presented a look-ahead scheme of ACC, called La-ACC, that is easily implementable for automated driving of a vehicle aiming at better driving performance and comfort in high-speed driving. Using the standard model of an existing ACC found on the commercial vehicles, the proposed La-ACC is evaluated. The look-ahead feature is a generic technique that introduces anticipatory behavior into the ACC or car-following models to enhance its original behavior with negligible computational complexity. Therefore, the look-ahead concept is directly integrated into the car-following models. A preliminary study [
34] found that the look-ahead IDM performs better than the conventional IDM in urban traffic, which flows through signalized intersections. It is expected to work well with other parametric car-following models according to our observation. Since our primary concern in this paper is to enhance the performance of ACC used in commercial cars, we do not include such investigations in this paper. However, in our future work, we would like to extensively investigate the usefulness of the look-ahead feature on different ACC or car-following models in various traffic contexts (e.g., traffic on urban roads with signalized intersections and merging scenarios). The proposed look-ahead technique should be fine-tuned further by using experimental driving, considering various factors associated with the natural driving environment.
The proposed La-ACC decides the control input based on prediction such as typical MPC-based driving schemes, although their prediction horizon and technique are different. Specifically, the prediction horizon of La-ACC is only a fraction of the horizon used in MPC. Instead of apprehending the predicted states of the involved vehicles in the entire horizon in MPC, the short horizon or look-ahead step in La-ACC only provides the sense of traffic trends (e.g., slowing, steady, or speeding) to help to take cautious action (i.e., not fully optimal action). La-ACC instantly decides the control input (e.g., in a few microseconds), whereas MPC needs a numerical solution of an optimization problem that usually takes a few hundreds of milliseconds.
La-ACC slightly differs from ACC because it uses the estimated acceleration of the preceding vehicle. However, the purpose of using the preceding vehicle’s estimated acceleration in decision making entirely differs from CACC that aims to maintain specified gaps and speeds for all vehicles in the platoon. Instead of applying the part of the acceleration of the preceding vehicle directly such as in CACC, La-ACC does not use such acceleration directly in the decision making but in determining the predicted state of the preceding vehicle. This distinct feature makes La-ACC more flexible than CACC and applicable to controlling individual vehicles. In a fully connected vehicle environment, information from the multiple preceding vehicles will be available readily to better predict the behavior of the immediate preceding vehicle using some car-following models. In such a scenario, the accuracy of the look-ahead state could be better, resulting in the improved performance of La-ACC. Remarkably, a vehicle with such La-ACC can smooth traffic flows despite traffic shock waves by alleviating them in addition to improving its performance, similar to the MPC-based smart driving presented in [
41]. As the main focus of this study is the existing commercial ACC in a traditional unconnected environment, such an exciting study is kept as future work.


 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}