
Toward Efficient Mobile Electric Vehicle Charging under Heterogeneous Battery Switching Technology



Abstract
:1. Introduction
1.1. Motivation
1.2. Introduction of Battery Switch Services
1.3. Study of a Heterogeneous-BS along with Reservations-Enabling
1.4. Contribution of This Paper
- Under heterogeneous battery switching technology, introducing a novel efficient charging mechanism for mobile EV and scheduling technique for depleted battery recharging.
- Proposed a battery reservation mechanism with the coordination of a global controller.
- Proposed algorithms for efficient charging and scheduling technique for depleted batteries recharging.
- The algorithms are discussed formally and compared the results with other benchmarks for measuring efficiency.
1.5. Paper Structure
2. Related Work
2.1. Plug-in Charging Service
2.2. On-the-Move Electric Vehicle Charging Scheduling
2.3. Battery Switching Service for Electric Vehicle
3. System Model
3.1. Overview of System Model
- EV: Each has predetermined minimum threshold where U = {,,, …, }. When SOC of EV is below this threshold, a EV sends the request message to GC for BS. The message contains vehicle ID, location of EV, arrival time, and battery type of EV. Then, the GC checks each BSS in the network according to its battery type and confirm the request to the (requested vehicle) by sending a reply message. When a reply message is delivered to the EV, a driver confirms the recommendation and tried to move EV toward the BSS to switch the battery.
- BSS: Each BSS maintains a stock of a limited number of fully charged batteries. These batteries are grouped into different categories according to heterogeneous EV type. Furthermore, they are defined as a symbolic set X = {type–I; type–II; type–III; …; type–X}. The depleted battery is replaced by a fully charged battery in BSS within 3–5 min. With such operations, these batteries are cycled from BSS to the charging factory for battery recharging to provide efficient service to EV.
- GC: A GC monitors each BSS in the network and manages the switching reservation of . Therefore, GC caches the update information (number of fully charged batteries and available type of ones) periodically to efficiently select the BSS for .
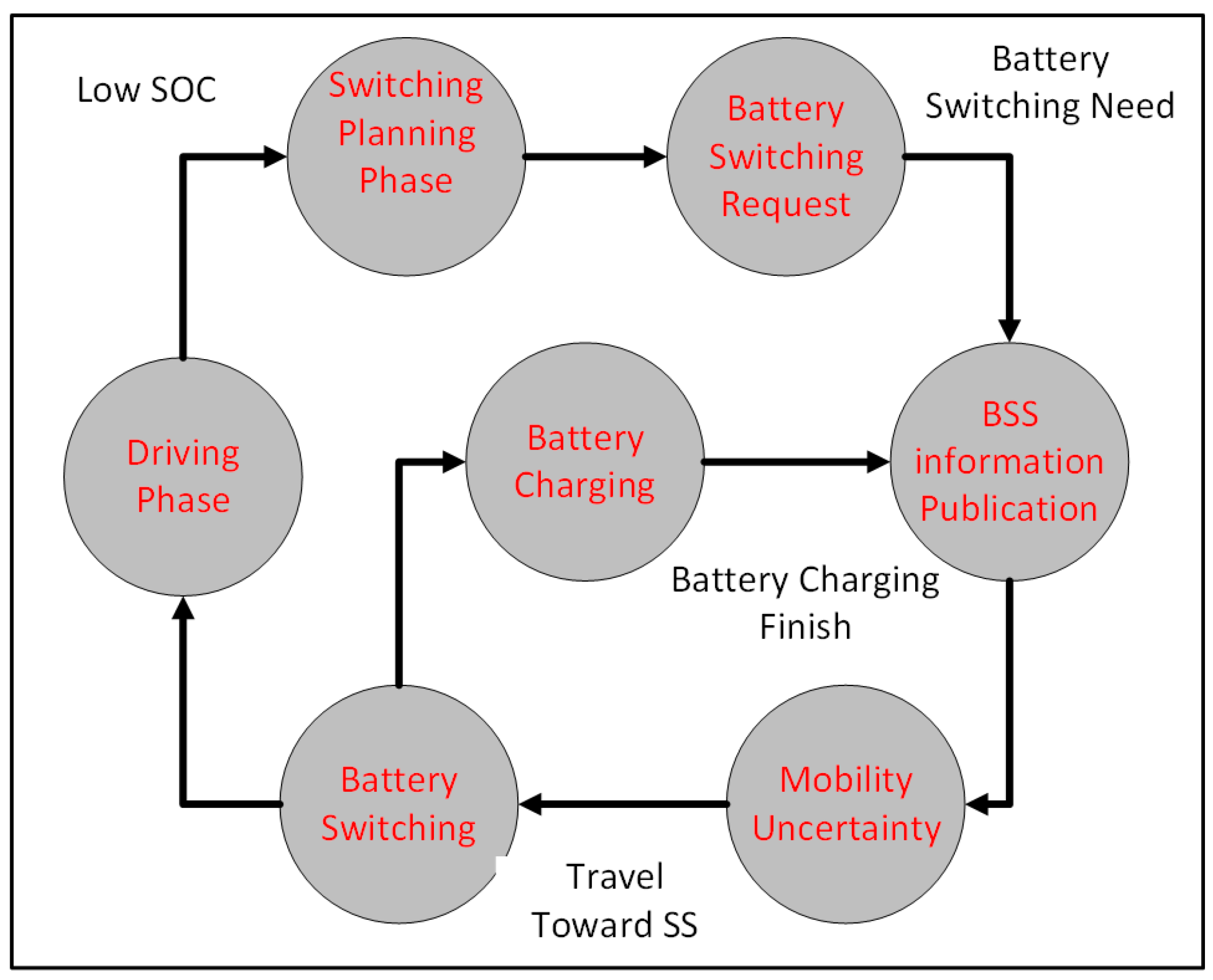
3.2. Heterogeneous Battery Switching Process
- Step 1: The GC checks each BSS in the network periodically and aggregates update information of each BSS. Aggregated information includes the ongoing charging session, number of depleted batteries in the switching station, battery stock availability in the switching station, and available battery types.
- Step 2: The mobile EV checks their SOC continuously. Once the SOC is below the minimum threshold value, the mobile EV informs the GC to require BS service along with its battery type.
- Step 3: Once a battery switch demand is requested to GC, the GC compiles the list of BSS in the network and ranks all of them according to waiting time and switching queue of vehicles. After this job is over, aggregated information regarding the required battery type of EV sends the report back to and refers to the best choice in the network.
- Step 4: The EV confirms the recommendation and sends the reply to GC for reservation.
3.3. Proposed Scheme
- : The denotes the average waiting time for battery switching at each BSS. It includes queuing time () of vehicle for BS and the duration of the switching process.
- : The presents the set of BSS in the network.
- : The denotes the queue of requested vehicles arrived at station.
- : shows the overall waiting time of all vehicles in a BS. It is computed by including , battery recharging time and switching time ().
3.4. Heterogeneous BSS Selection Concerning BS Reservation and Load Balancing across BSS
3.4.1. Global Planing Phase
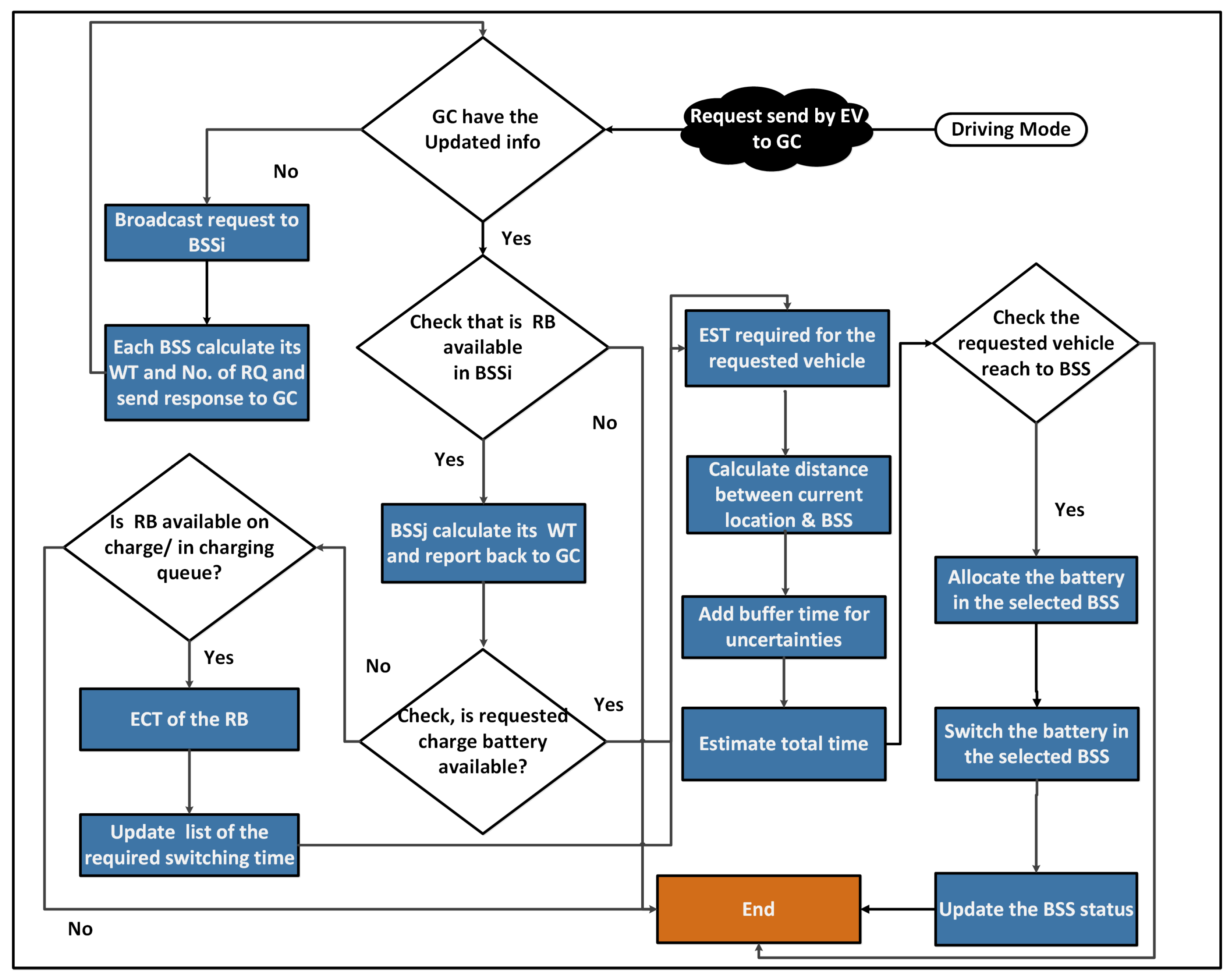
- When SOC of EV is below the minimum threshold, the vehicle sends request to GC for BS reservation along with its personal information including (ID, Current Battery Energy Level (), Current location () and Battery type ()) (line 1 to 3 in Algorithm 1).
- If GC has updated information about (No, of in a network), then it checks the availability of across the network (line 4 and 8 in Algorithm 1). Otherwise, GC broadcasts request across the network along with information of (line 5 in Algorithm 1).
| Algorithm 1 Heterogeneous BS and Load balancing across . |
|
3.4.2. Selection of BSS Phase for BS Service
- Upon sending reservation request from , each BSS check that the required is readily fully charge available (line 8 and 9 in Algorithm 1) only if requested battery () is available across the network.
- If required is available fully charge in , the selected BSS calculates its waiting time and maximum number of stock availability ( > 0) (line 10 and 11 in Algorithm 1).
- For the purpose of estimation ATS such information is additionally needed (ID, , , , ). Thus, for accounting and identifying each and every requested vehicle reach to selected BSS or not, the optimizing equation is given below (line 12 to 14 Algorithm 1).
- After confirming the selection of BSS and reservation response back to GC, the vehicle may need extra time and cannot reach the selected BSS on required time because of road uncertainties including traffic jam signals, road congestion, and accident. By accounting uncertainty time for each the Equation is given below (line 16 Algorithm 1).
- Upon sending request by to GC some time the required battery type is not readily available ( = 0, ) but available on charge. In this case, the vehicle will wait when the required battery type is fully charged according to Equation (6) when = . The switching station will change the status of the number of > 0, X ∈ ) and the update status(line 21 to 24 Algorithm 1).
3.5. Scheduling Technique Under Heterogeneous Battery Switching Station
- All the depleted batteries are remove from the set of requested vehicle and identify it’s current SOC and place it in the (e.g., ) (line 1 to 2 Algorithm 2 (Battery Recharging Scheduling Technique in BSS)).
| Algorithm 2 Battery Recharging Scheduling Technique in BSS. |
|
- According to SOC identifies its belonging charging type, where if it’s SOC>50% its belong to type I due to Shortest Time Charge () if its SOC ≤ 50%, ≥30% its belong to type II and <30% refer to type III because of more recharging time. According to Equation (6) identify its charging time and shift the depleted batteries () from to (line 4 Algorithm 2).
- Hence, the loop is operating until each battery of the is not categorized and cannot assign to the specified Pole j () for recharging the battery as shown in Figure 3.
- After allocating each battery to its specified , start recharging of the batteries. When = the BSS update the list of (line 8 to 11 Algorithm 2).
- If are available in , belong to type X and not schedule according to the required manner, schedule it and repeat operation loop from line 8 to 11 until each is not fully charged.
3.6. Discussion
3.6.1. Issue Regarding Reservation Randomness
3.6.2. Security Issue Regarding Centralize Manner
3.6.3. Discussion Regarding Battery Switching and Plug-in Charging Service
4. Performance Evaluation
4.1. Simulation Configuration Environment
- Coda Automotive
- Wheego Whip
- Hyundai BlueOn
4.2. Evaluation Parameters
4.2.1. Total Time
- The average waiting time which is before switching is required in BSS for achieving service.
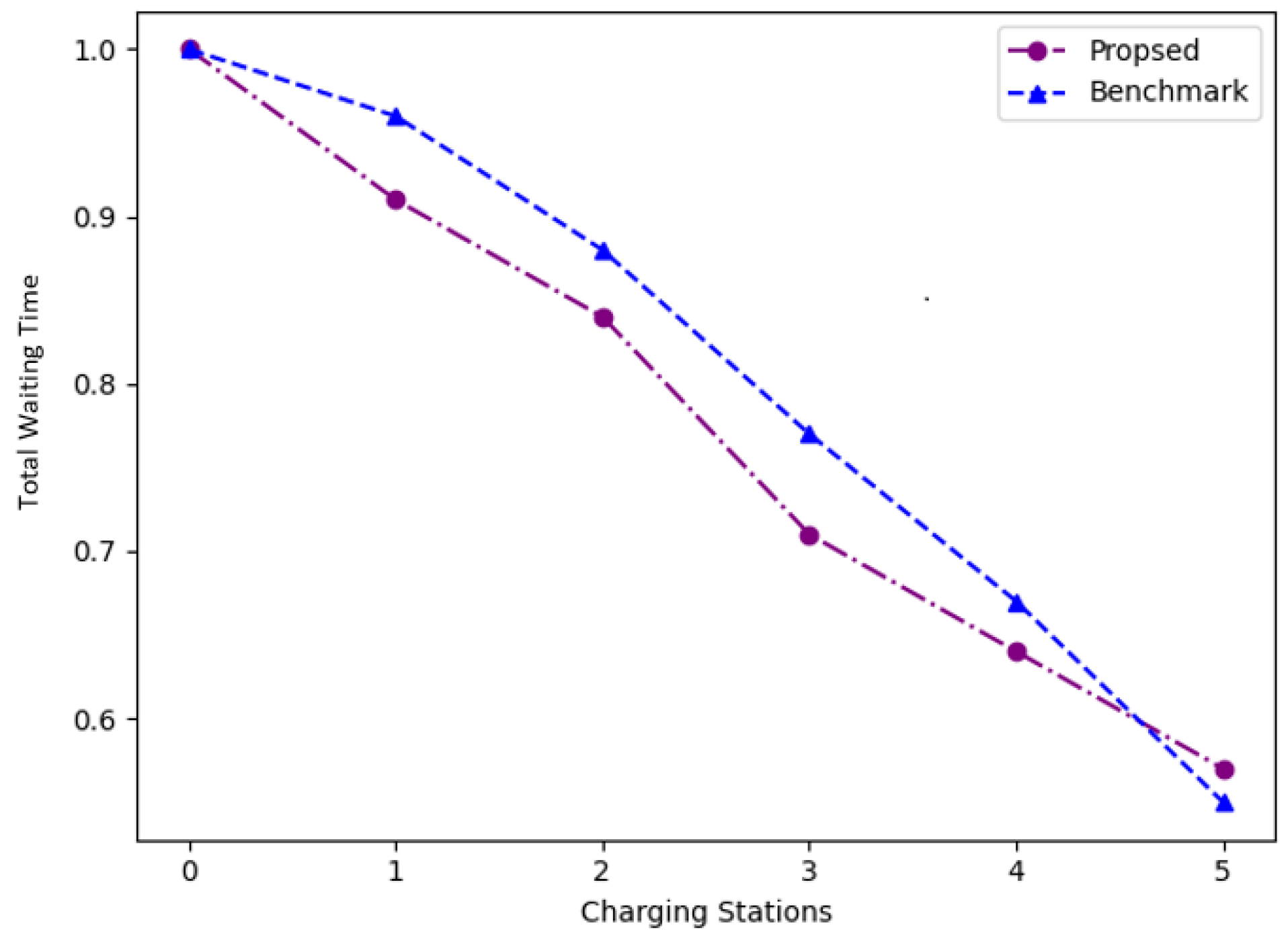
4.2.2. Total Waiting Time for Selection of BSS
- The BSS within the EV reach-ability according to CSOC of EV, that upon charging request to the GC, guarantees the lowest switching delay.
- The foreseen switching delay for EV is computed as the sum of time to complete the switching of EVs currently present at the BSS, switching time of single vehicle and battery recharging time (if required battery type is available on charge).
- If two BSS have the same switching delay, select BSS which has minimum traveled distance and nearest among to .
4.2.3. Number of EV Successfully Reach to BSS
- The experiences of each EV that, how much vehicle reaches to BSS with sufficient energy for switching the battery with inbound communication to GC.
4.2.4. Total Energy Consumption on The Trip
4.3. Influence of Reservation Base EV Density at BSS
4.4. Influence of Optimally Charging Scheduling
4.5. Performance under Heterogeneous BS of Charged EV
5. Conclusions
Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, N.; Wang, M.; Zhang, N.; Shen, X. Energy and information management of electric vehicular network: A survey. IEEE Commun. Surv. Tutor. 2020, 22, 967–997. [Google Scholar] [CrossRef]
- Saputra, Y.M.; Hoang, D.T.; Nguyen, D.N.; Dutkiewicz, E.; Mueck, M.D.; Srikanteswara, S. Energy demand prediction with federated learning for electric vehicle networks. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Savari, G.F.; Krishnasamy, V.; Sathik, J.; Ali, Z.M.; Aleem, S.H.E.A. Internet of Things based real-time electric vehicle load forecasting and charging station recommendation. ISA Trans. 2020, 97, 431–447. [Google Scholar] [CrossRef]
- Jia, Q.; Long, T. A review on charging behavior of electric vehicles: Data, model, and control. Control Theory Technol. 2020, 18, 217–230. [Google Scholar] [CrossRef]
- Muratori, M. Impact of uncoordinated plug-in electric vehicle charging on residential power demand. Nat. Energy 2018, 3, 193–201. [Google Scholar] [CrossRef]
- Yahyazadeh, S.; Khaleghi, M.; Farzamkia, S.; Khoshkbar-Sadigh, A. A New Structure of Bidirectional DC-DC Converter for Electric Vehicle Applications. In Proceedings of the 2020 11th Power Electronics, Drive Systems, and Technologies Conference (PEDSTC), Tehran, Iran, 4–6 February 2020; pp. 1–6. [Google Scholar]
- Cao, Y.; Miao, Y.; Min, G.; Wang, T.; Zhao, Z.; Song, H. Vehicular-publish/subscribe (VP/S) communication enabled on-the-move EV charging management. IEEE Commun. Mag. 2016, 54, 84–92. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Cao, Y.; Peng, L.; Li, J.; Ahmad, N.; Yu, S. Mobile Charging as a Service: A Reservation-Based Approach. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1976–1988. [Google Scholar] [CrossRef]
- Al-Ogaili, A.S.; Hashim, T.J.T.; Rahmat, N.A.; Ramasamy, A.K.; Marsadek, M.B.; Faisal, M.; Hannan, M.A. Review on scheduling, clustering, and forecasting strategies for controlling electric vehicle charging: Challenges and recommendations. IEEE Access 2019, 7, 128353–128371. [Google Scholar] [CrossRef]
- Cao, Y.; Liu, S.; He, Z.; Dai, X.; Xie, X.; Wang, R.; Yu, S. Electric Vehicle Charging Reservation Under Preemptive Service. In Proceedings of the 2019 1st International Conference on Industrial Artificial Intelligence (IAI), Shenyang, China, 23–27 July 2019; pp. 1–6. [Google Scholar]
- Zhao, Y.; He, X.; Yao, Y.; Huang, J. Plug-in electric vehicle charging management via a distributed neurodynamic algorithm. Appl. Soft Comput. 2019, 80, 557–566. [Google Scholar] [CrossRef]
- Alsabbagh, A.; Yin, H.; Ma, C. Distributed charging management of multi-class electric vehicles with different charging priorities. IET Gener. Transm. Distrib. 2019, 13, 5257–5264. [Google Scholar] [CrossRef]
- Sachan, S.; Deb, S.; Singh, S.N. Different charging infrastructures along with smart charging strategies for electric vehicles. Sustain. Cities Soc. 2020, 2020, 102238. [Google Scholar] [CrossRef]
- Vacheva, G.; Gilev, B.; Hinov, N. Development of Control Strategy for Charging Electric Vehicles in Micro and Nanogrid. In Proceedings of the 2018 International Conference on High Technology for Sustainable Development (HiTech), Sofia, Bulgaria, 11–14 June 2018; pp. 1–4. [Google Scholar]
- Zweistra, M.; Janssen, S.; Geerts, F. Large scale smart charging of electric vehicles in practice. Energies 2020, 13, 298. [Google Scholar] [CrossRef] [Green Version]
- Ning, Z.; Huang, J.; Wang, X.; Rodrigues, J.J.P.C.; Guo, L. Mobile edge computing-enabled Internet of vehicles: Toward energy-efficient scheduling. IEEE Netw. 2019, 33, 198–205. [Google Scholar] [CrossRef]
- Ban, M.; Yu, J.; Li, Z.; Guo, D.; Ge, J. Battery Swapping: An aggressive approach to transportation electrification. IEEE Electrif. Mag. 2019, 7, 44–54. [Google Scholar] [CrossRef]
- Cao, Y.; Yang, S.; Min, G.; Zhang, X.; Song, H.; Kaiwartya, O.; Aslam, N. A cost-efficient communication framework for battery-switch-based electric vehicle charging. IEEE Commun. Mag. 2017, 55, 162–169. [Google Scholar] [CrossRef]
- Yang, J.; Guo, F.; Zhang, M. Optimal planning of swapping/charging station network with customer satisfaction. Transp. Res. Part E Logist. Transp. Rev. 2017, 103, 174–197. [Google Scholar] [CrossRef]
- Wu, H.; Pang, G.K.H.; Choy, K.L.; Lam, H.Y. An optimization model for electric vehicle battery charging at a battery swapping station. IEEE Trans. Veh. Technol. 2017, 67, 881–895. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, T.; Yao, S.; Soh, C.B.; Wang, P. Distributed operation management of battery swapping-charging systems. IEEE Trans. Smart Grid 2018, 10, 5320–5333. [Google Scholar] [CrossRef]
- Zhang, X.; Cao, Y.; Peng, L.; Ahmad, N.; Xu, L. Towards Efficient Battery Swapping Service Operation under Battery Heterogeneity. IEEE Trans. Veh. Technol. 2020, 69, 6107–6118. [Google Scholar] [CrossRef]
- Onur, E. A dynamic charging strategy with hybrid fast charging station for electric vehicles. Energy 2020, 2020, 117680. [Google Scholar]
- Shamsdin, S.H.; Seifi, A.; Rostami-Shahrbabaki, M.; Rahrovi, B. Plug-in electric vehicle optimization and management charging in a smart parking lot. In Proceedings of the 2019 IEEE Texas Power and Energy Conference (TPEC), College Station, TX, USA, 7–8 February 2019; pp. 1–7. [Google Scholar]
- Yi, Z.; Scoffield, D. A data-driven framework for residential electric vehicle charging load profile generation. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Bangkok, Thailand, 6–9 June 2018; pp. 519–524. [Google Scholar]
- Das, H.S.; Rahman, M.M.; Li, S.; Tan, C.W. Electric vehicles standards, charging infrastructure, and impact on grid integration: A technological review. Renew. Sustain. Energy Rev. 2020, 120, 109618. [Google Scholar] [CrossRef]
- Khan, W.; Ahmad, F.; Alam, M.S. Fast EV charging station integration with grid ensuring optimal and quality power exchange. Eng. Sci. Technol. Int. J. 2019, 22, 143–152. [Google Scholar] [CrossRef]
- Solanke, T.U.; Ramachandaramurthy, V.K.; Yong, J.Y.; Pasupuleti, J.; Kasinathan, P.; Rajagopalan, A. A review of strategic charging–discharging control of grid-connected electric vehicles. J. Energy Storage 2020, 28, 101193. [Google Scholar] [CrossRef]
- Deilami, S. Online coordination of plug-in electric vehicles considering grid congestion and smart grid power quality. Energies 2018, 11, 2187. [Google Scholar] [CrossRef] [Green Version]
- Ma, Z.; Callaway, D.S.; Hiskens, I.A. Decentralized charging control of large populations of plug-in electric vehicles. IEEE Trans. Control Syst. Technol. 2011, 21, 67–78. [Google Scholar] [CrossRef]
- Carli, R.; Dotoli, M. A decentralized control strategy for optimal charging of electric vehicle fleets with congestion management. In Proceedings of the 2017 IEEE International Conference on Service Operations and Logistics, and Informatics (SOLI), Bari, Italy, 18–20 September 2017; pp. 63–67. [Google Scholar]
- Stüdli, S.; Crisostomi, E.; Middleton, R.; Shorten, R. A flexible distributed framework for realising electric and plug-in hybrid vehicle charging policies. Int. J. Control 2012, 85, 1130–1145. [Google Scholar] [CrossRef]
- Cao, Y.; Wang, T.; Kaiwartya, O.; Min, G.; Ahmad, N.; Abdullah, A.H. An EV charging management system concerning drivers’ trip duration and mobility uncertainty. IEEE Trans. Syst. Man Cybern. Syst. 2016, 48, 596–607. [Google Scholar] [CrossRef] [Green Version]
- Barhagh, S.S.; Abapour, M.; Mohammadi-Ivatloo, B. Optimal Scheduling of Electric Vehicles and Photovoltaic Systems in Residential Complexes under Real-Time Pricing Mechanism. J. Clean. Prod. 2019, 246, 119041. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, C.; Sun, C.; Chen, Z.; Li, G.; Liu, Y. Cooperative charging management for electric vehicles via mobile edge computation. J. Power Sources 2020, 474, 228533. [Google Scholar] [CrossRef]
- Ma, Z.; Callaway, D.; Hiskens, I. Decentralized charging control for large populations of plug-in electric vehicles: Application of the Nash certainty equivalence principle. In Proceedings of the 2010 IEEE International Conference on Control Applications, Harbin, China, 20–23 June 2010; pp. 191–195. [Google Scholar]
- Carli, R.; Dotoli, M. A distributed control algorithm for waterfilling of networked control systems via consensus. IEEE Control Syst. Lett. 2017, 1, 334–339. [Google Scholar] [CrossRef]
- Sarker, M.R.; Pandžić, H.; Ortega-Vazquez, M.A. Optimal operation and services scheduling for an electric vehicle battery swapping station. IEEE Trans. Power Syst. 2014, 30, 901–910. [Google Scholar] [CrossRef]
- Kang, Q.; Wang, J.; Zhou, M.; Ammari, A.C. Centralized charging strategy and scheduling algorithm for electric vehicles under a battery swapping scenario. IEEE Trans. Intell. Transp. Syst. 2015, 17, 659–669. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, Y.; Ge, S.; Gu, C.; Li, F. Day-ahead scheduling for an electric vehicle PV-based battery swapping station considering the dual uncertainties. IEEE Access 2019, 7, 115625–115636. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Papers | Checking Parameters | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Author [Reference No] | DC Fast-Charging | Charging Scheduling | Data Driven Framework | AC Charging Technologies | Solar PV Generation | NOL-MSSCA | Charging Reservation | Locally and Globally Scheduling | RouteOptimization |
| Elma, Onur [23] | Yes | No | No | No | No | No | No | No | Yes |
| Shamsdin et al. [24] | Yes | Yes | No | No | No | No | No | No | Yes |
| Yi, Zonggen et al. [25] | Yes | No | Yes | No | No | No | No | No | No |
| Das, H.S. et al. [26] | Yes | Yes | No | Yes | No | No | No | No | No |
| Khan et al. [27] | Yes | No | No | No | Yes | No | No | No | No |
| Deliami et al. [29] | Yes | Yes | No | No | No | Yes | No | No | No |
| Cao et al. [30] | Yes | Yes | No | No | No | No | Yes | No | No |
| S.S. Barhagh et al. [31] | Yes | Yes | No | No | No | No | No | Yes | No |
| Zhang et al. [32] | Yes | Yes | No | No | No | No | No | No | Yes |
| Solanke et al. [28] | Yes | Yes | No | No | No | No | Yes | No | Yes |
| Symbol | Description |
|---|---|
| U | Set of total vehicle |
| BSS | Battery Switching Station |
| Requested Battery | |
| Requested Vehicle | |
| Queue of Depleted Battery | |
| Maximum number of battery stock | |
| ATS | Available Time for switch |
| Nonlinear Online Maximum Sensitivity selection Based Charging Algorithm | |
| Buffer Time | |
| EST | Estimate Total Time |
| Estimate Energy Consumption | |
| Initial Time | |
| Final Time | |
| Battery recharging Time | |
| Estimate Switching Time | |
| Estimate Arrival Time at BSS | |
| Extra Time for Uncertainty | |
| Switching Time | |
| Number of Vehicle | |
| Current Battery Energy Level | |
| Expected Charging Time of drained battery | |
| Maximum Battery Energy Level | |
| V | Velocity |
| Charging Power | |
| Energy Consumption Per meter | |
| d | Distance |
| r | position Vector |
| Position Vector of BSS | |
| Position Vector of vehicle | |
| Maximum Stock availability of Battery | |
| Overall Waiting Time of each Vehicle in BSS | |
| Number of charging Pole for recharging Battery | |
| Queue of Requested Vehicle | |
| Line of Depleted Battery recharging Queue | |
| Total number of BSS in the Network |
| Parameters | Values |
|---|---|
| Simulation Area | 4500 × 3400 m2 |
| Total Number of EV | 300 |
| Speed of vehicle | 30 to 40 Km/h |
| Deployed Number of BSS | 6 |
| Total Simulation Time | 12 h |
| Type’s of Batteries | (1) Coda Automotive (2) Wheego Whip (3) Hyundai BlueOn |
| Battery Size | (1) 33.8 KWh (2) 30 KWh (3) 16.4 KWh |
| Minimum SOC Threshold | (1) 30% (2) 40% (3) 50% |
| Maximum Traveling Distance | (1) 190 km (2) 160 km (3) 140 km |
| Initially Hold Number of batteries at each BSS | 10 |
| Distribution of Batteries Across the Network for 300 EV fleet | 60 |
| Charging Power of recharging the battery | 10 KW |
| Battery Switch Time | 3 min |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad, A.; Ullah, Z.; Khalid, M.; Ahmad, N. Toward Efficient Mobile Electric Vehicle Charging under Heterogeneous Battery Switching Technology. Appl. Sci. 2022, 12, 904. https://doi.org/10.3390/app12020904
Ahmad A, Ullah Z, Khalid M, Ahmad N. Toward Efficient Mobile Electric Vehicle Charging under Heterogeneous Battery Switching Technology. Applied Sciences. 2022; 12(2):904. https://doi.org/10.3390/app12020904
Chicago/Turabian StyleAhmad, Afaq, Zahid Ullah, Muhammad Khalid, and Naveed Ahmad. 2022. "Toward Efficient Mobile Electric Vehicle Charging under Heterogeneous Battery Switching Technology" Applied Sciences 12, no. 2: 904. https://doi.org/10.3390/app12020904