
Detection of Pits by Conjugate Lines: An Algorithm for Segmentation of Overlapping and Adhesion Targets in DE-XRT Sorting Images of Coal and Gangue



Abstract
:1. Introduction
- (1)
- This paper defines the adhesion form of the coal and gangue image target and provides the judgment method. Concave defects are classified according to different adhesion forms, and a pit point detection algorithm is designed for the concave defects.
- (2)
- It is proposed for the first time that conjugate lines be used to detect the pit point of the concave defect. The overlapping and adhesion target segmentation problem is solved with the minimum distance search method. It lays a foundation for further identification and positioning of coal and gangue.
- (3)
- The algorithm’s applicability is verified through experiments, and the algorithm’s limitations are analyzed.
2. Materials and Methods
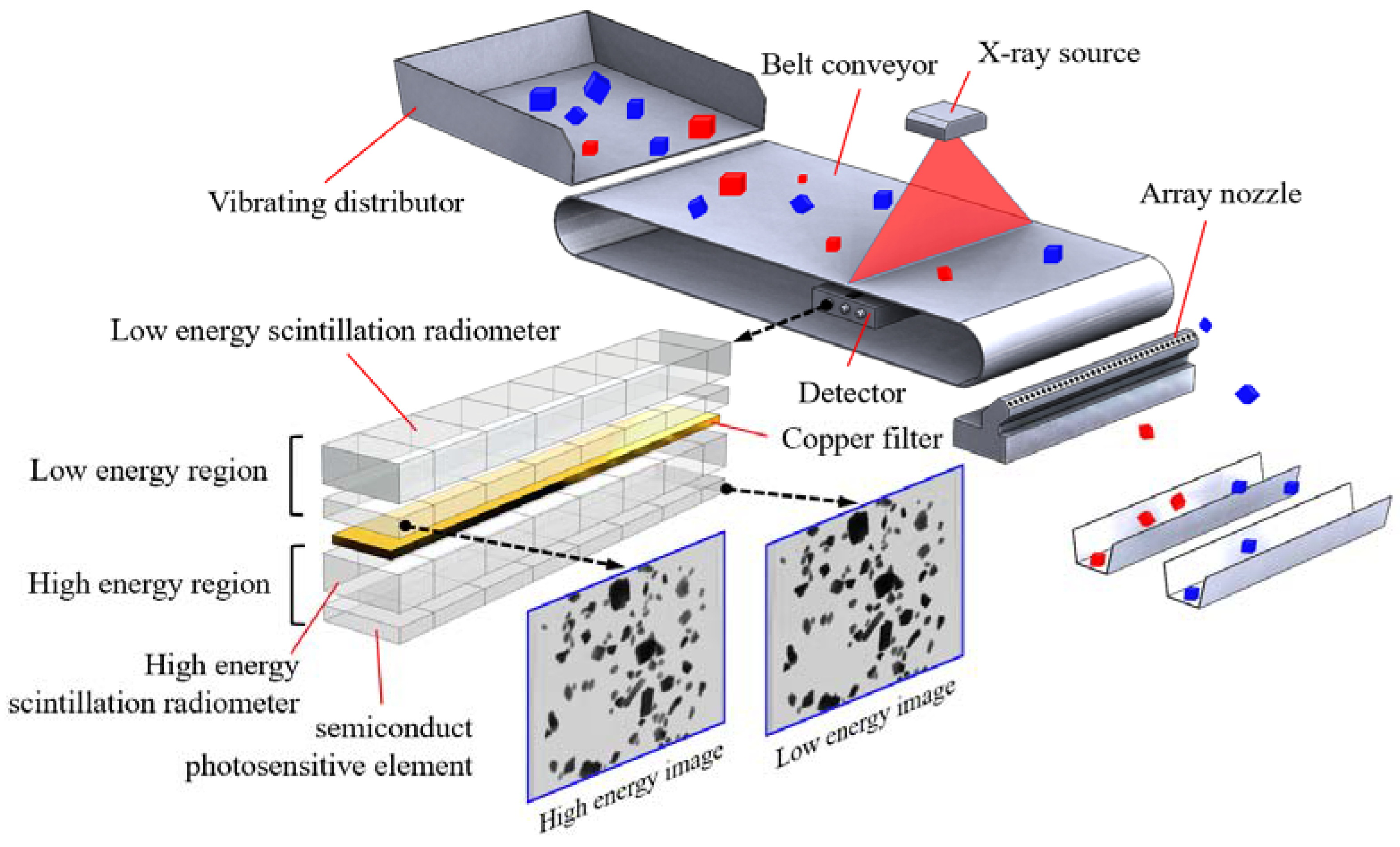
2.1. Experimental Platform and Materials
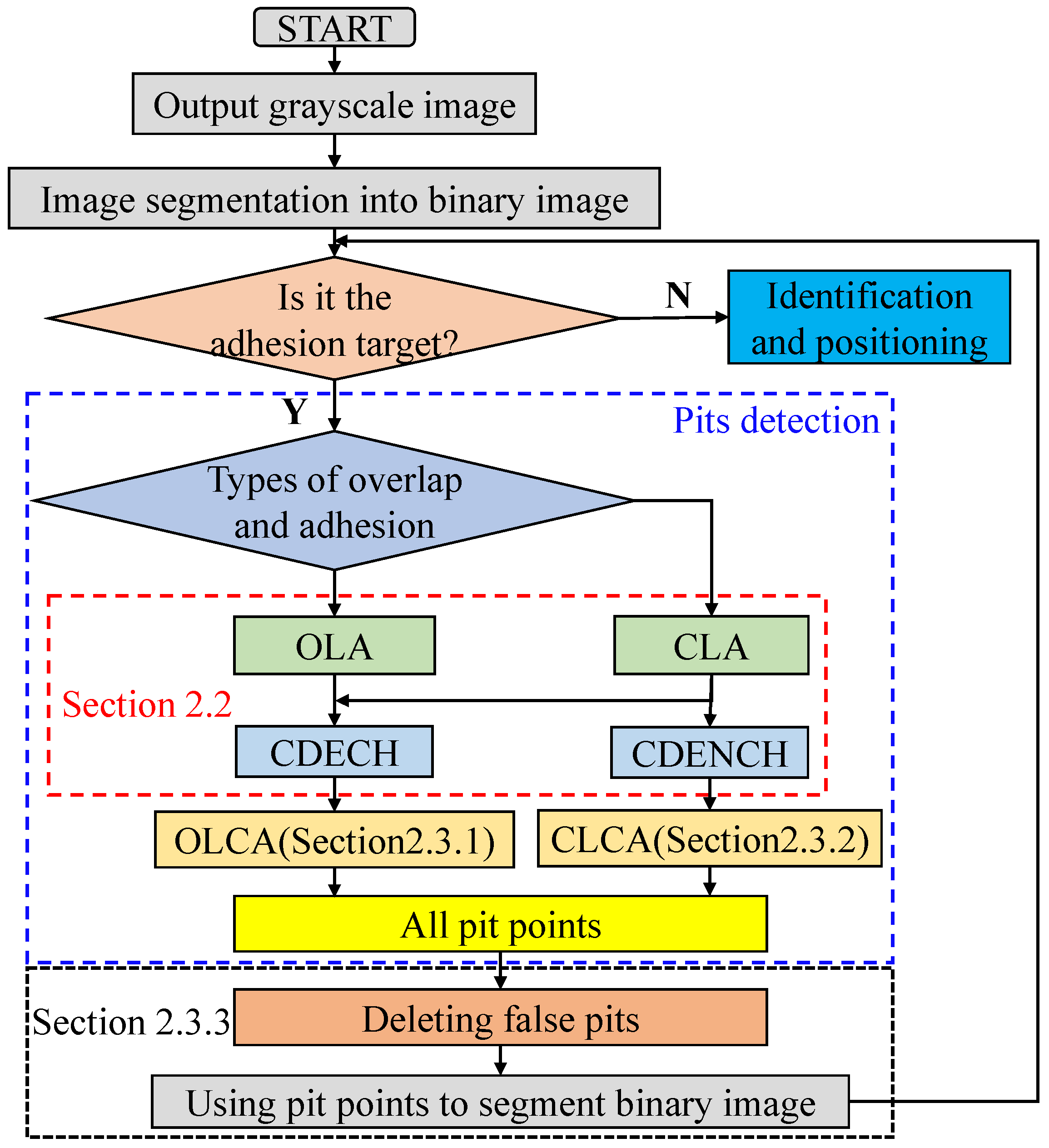
2.2. Image Processing Methods
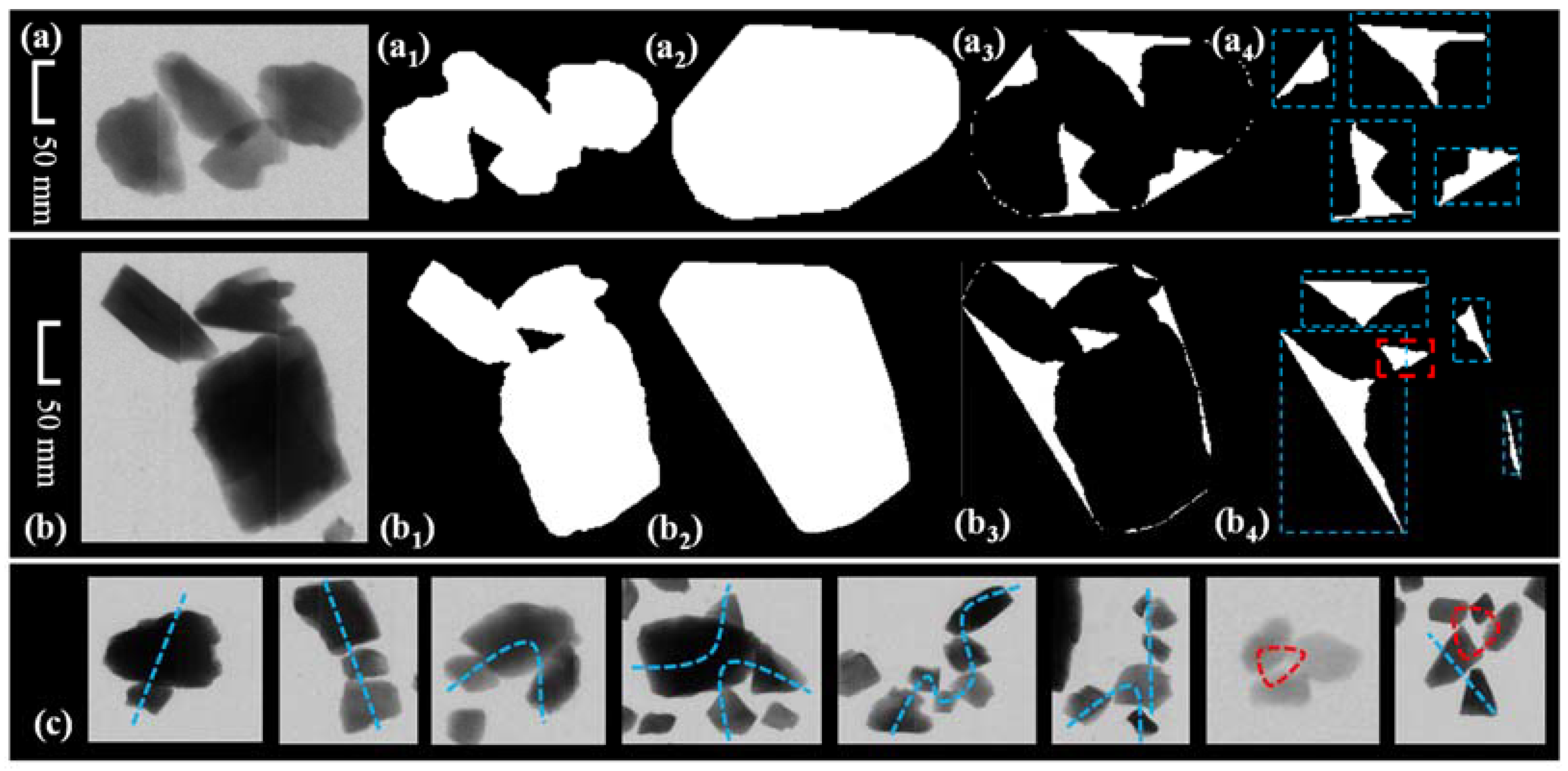
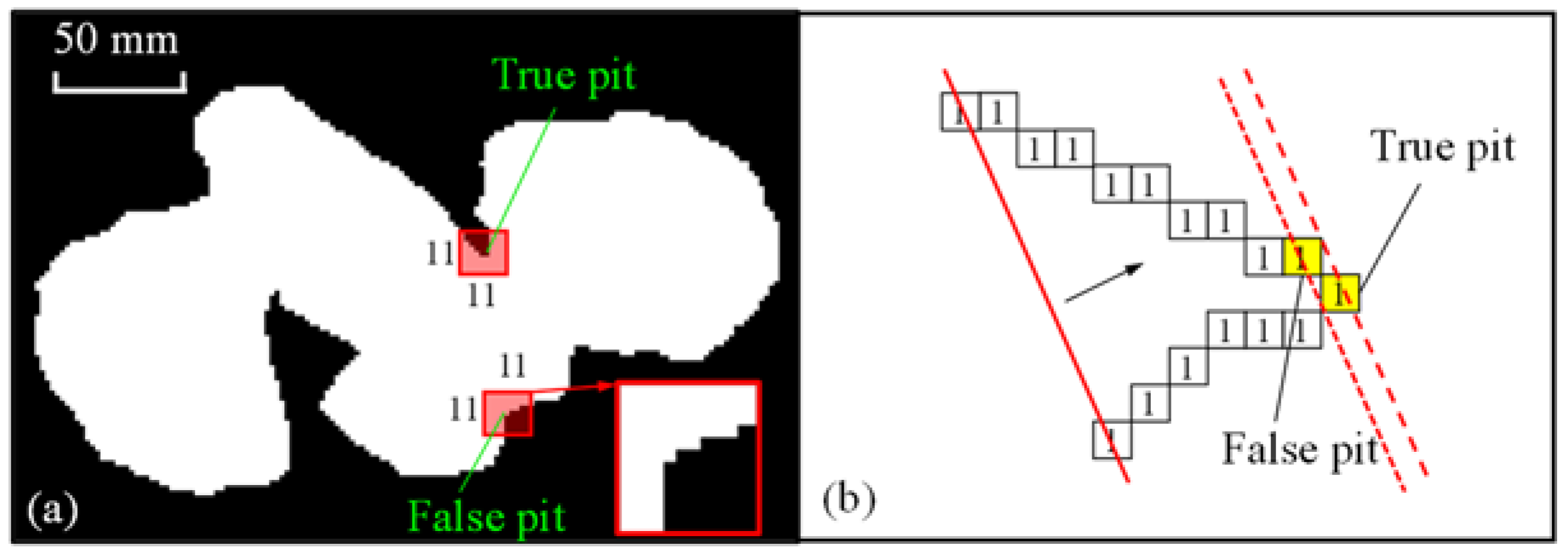
2.2.1. Types of Concave Defects and Adhesion Targets
- (1)
- Concave defects at the edge of the convex hull (CDECH). Close to the edge of the bw (a1).
- (2)
- Concave defect at the edge of the non-convex hull (CDENCH). Not close to the edge of the bw (a1).
- (1)
- If the concave defects in the adhesion target are all CDECH, the adhesion is OLA.
- (2)
- If there is a CDENCH in the adhesion target, the adhesion is CLA.
2.2.2. Method for Judging OLA and CLA
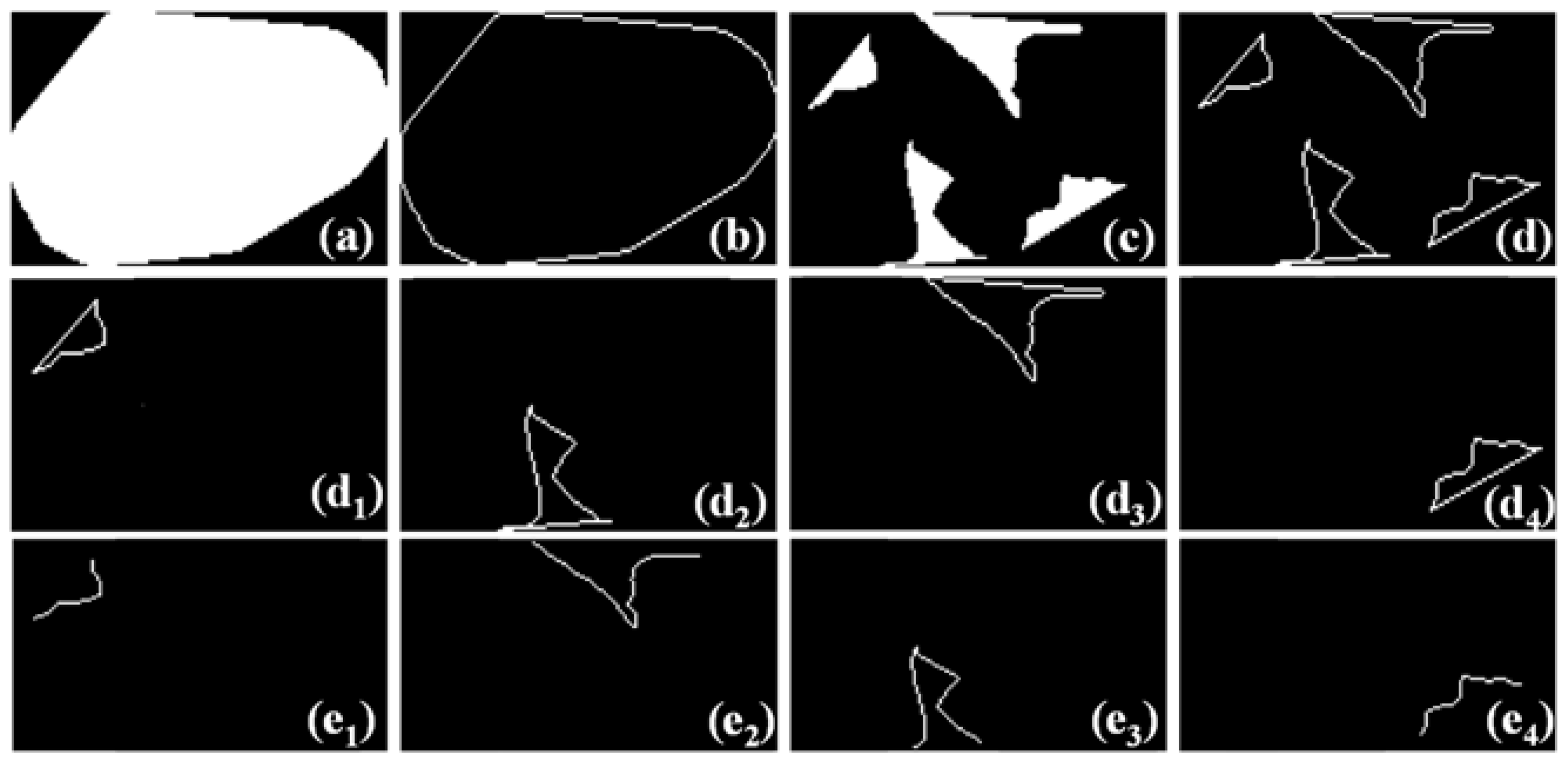
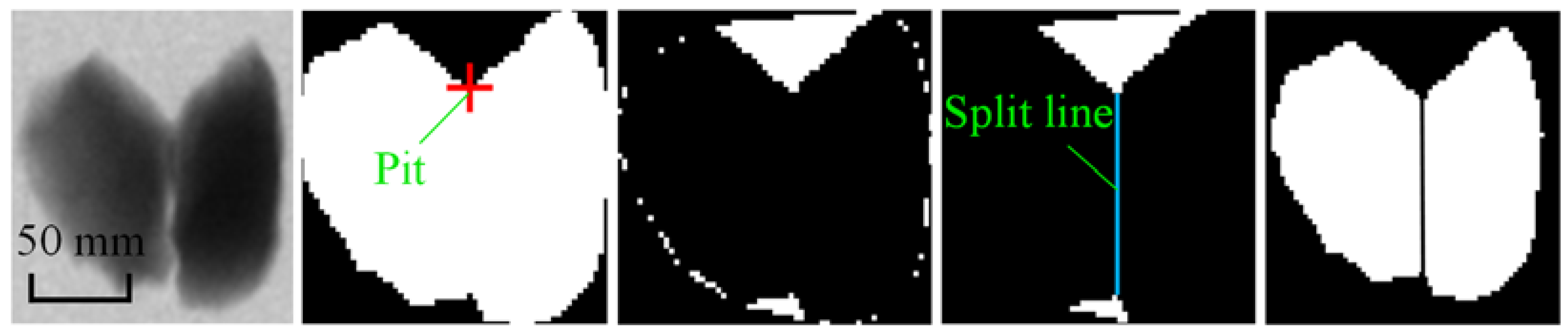
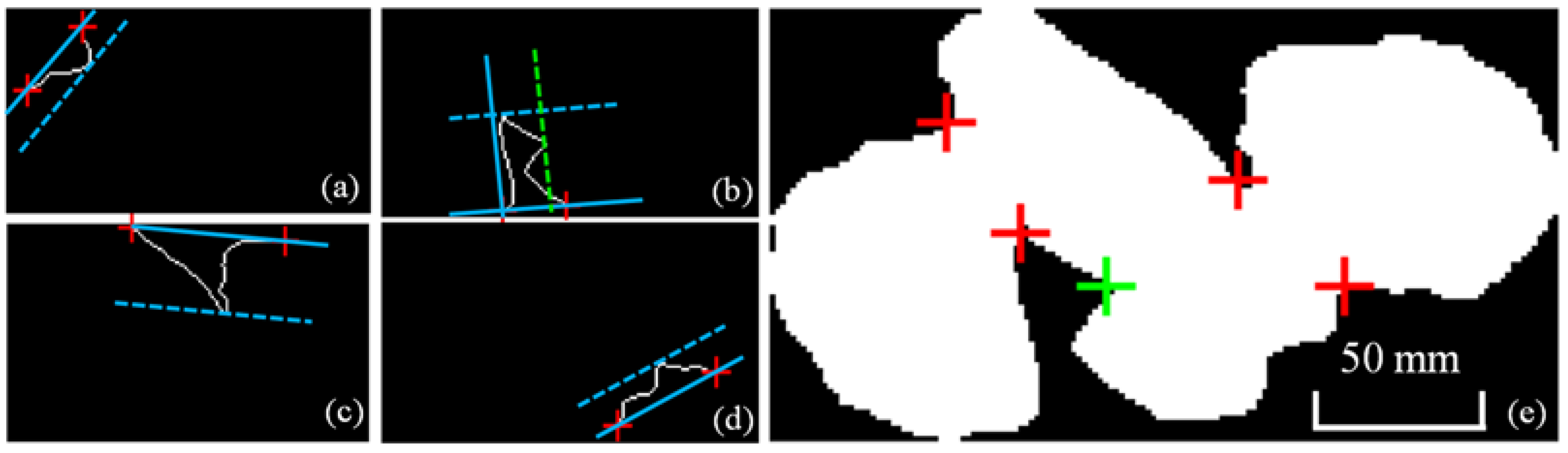
2.3. Pit Detection Method
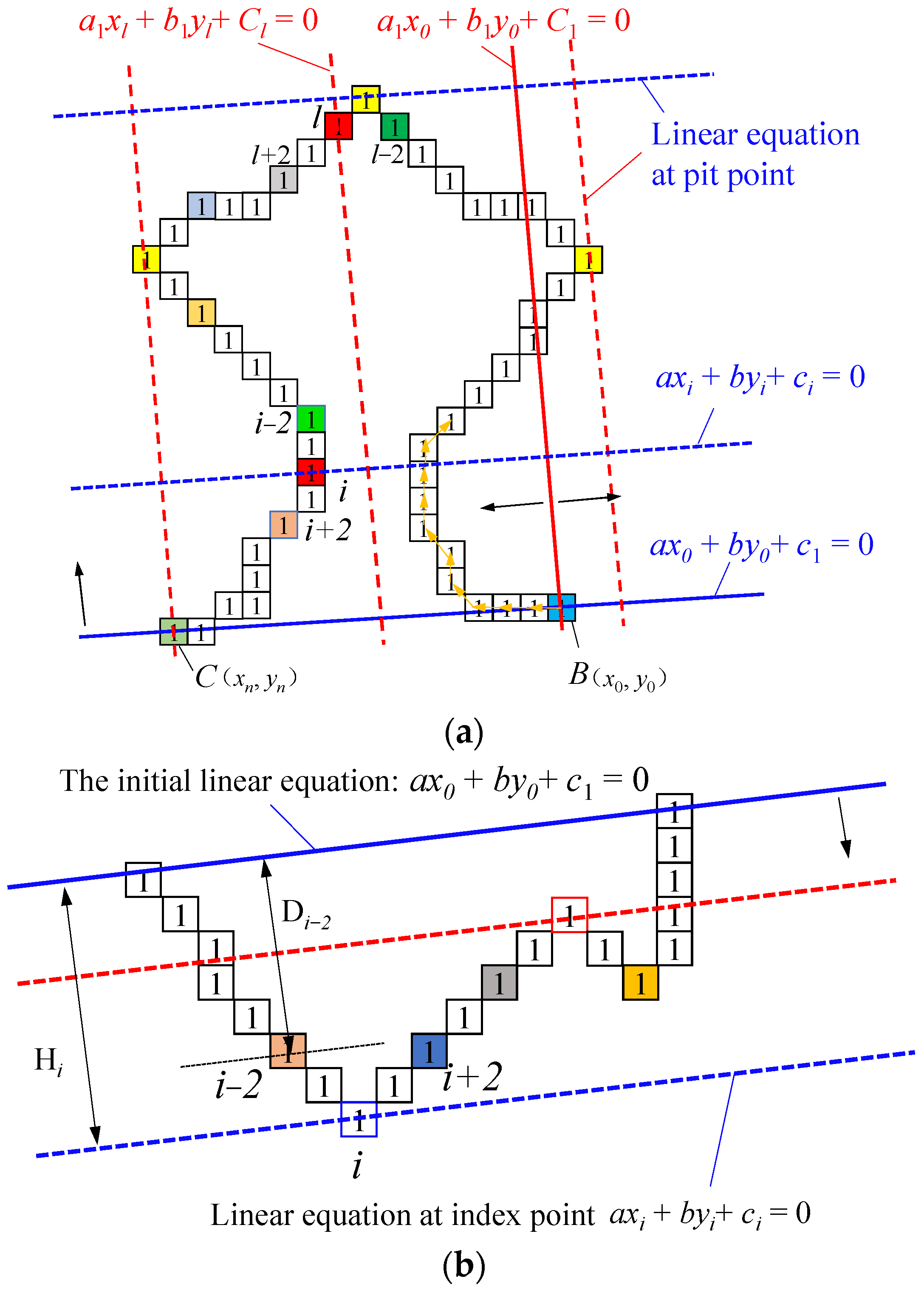
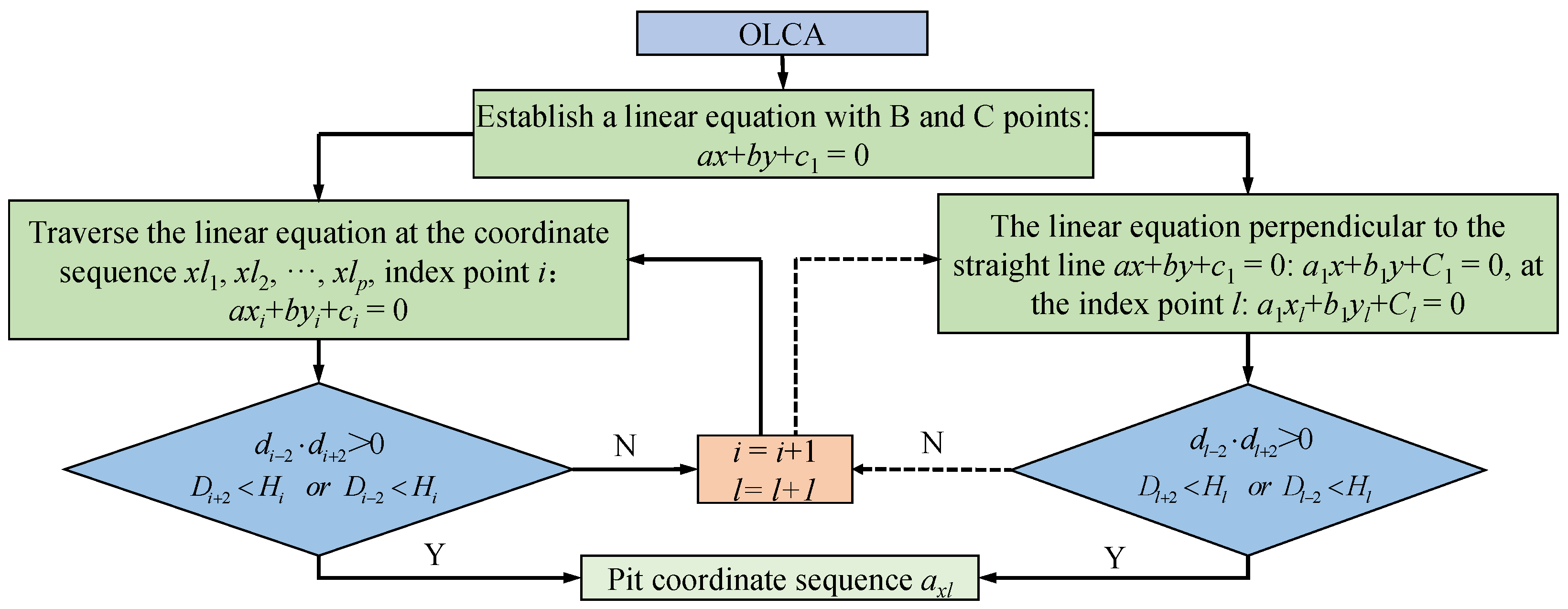
2.3.1. Open-Loop Crossover Algorithm (OLCA)
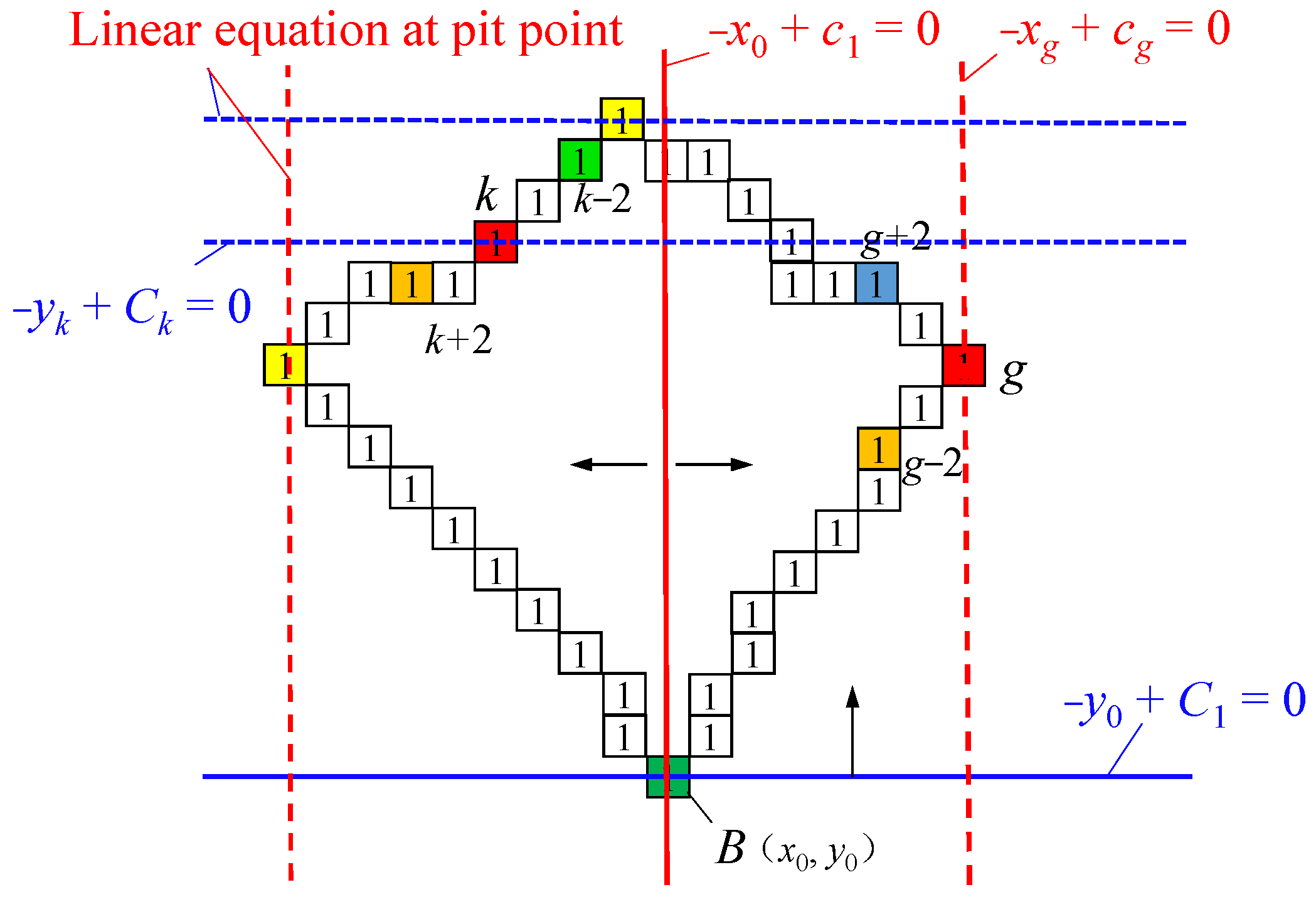
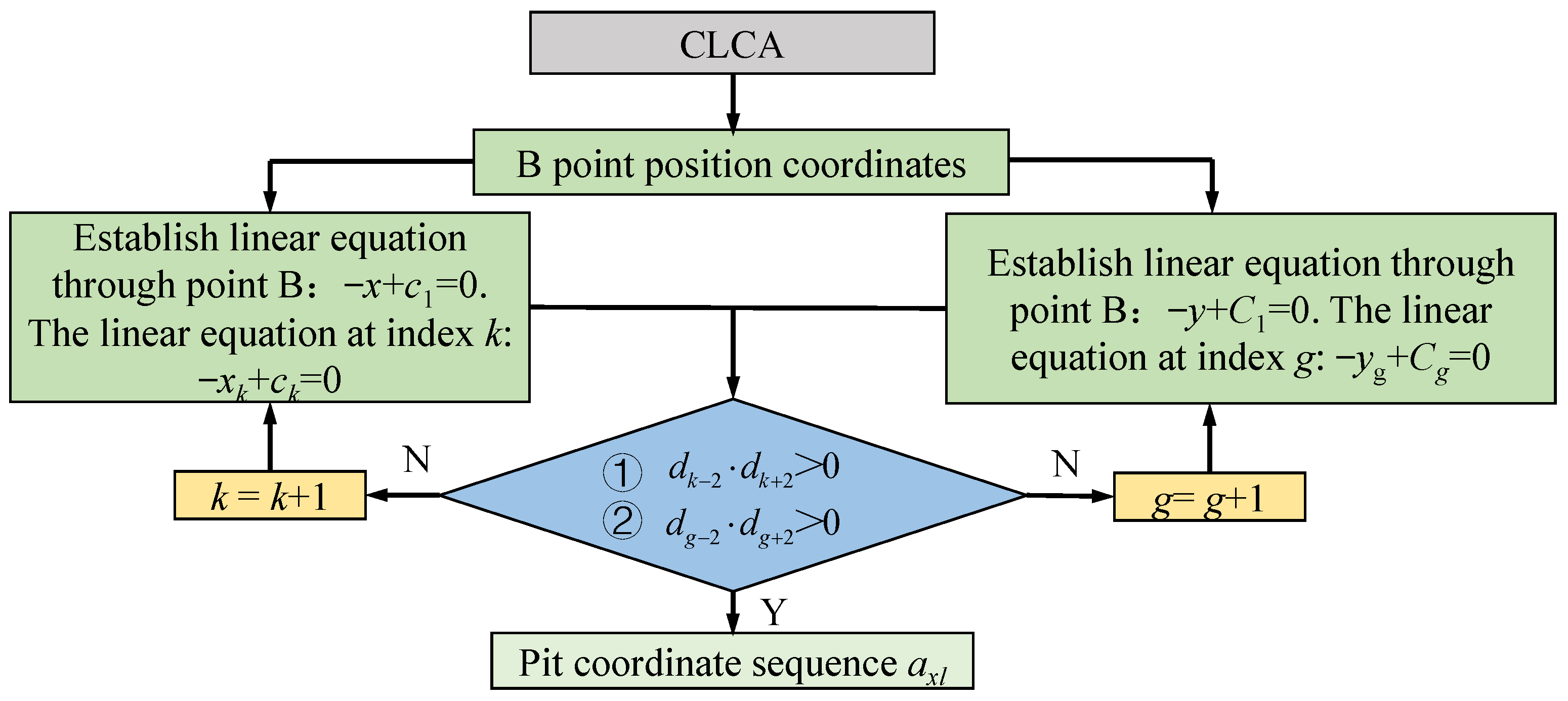
2.3.2. Closed-Loop Crossover Algorithm (CLCA)
2.3.3. False Pit Rejection and Image Segmentation Methods
3. Results and Discussion
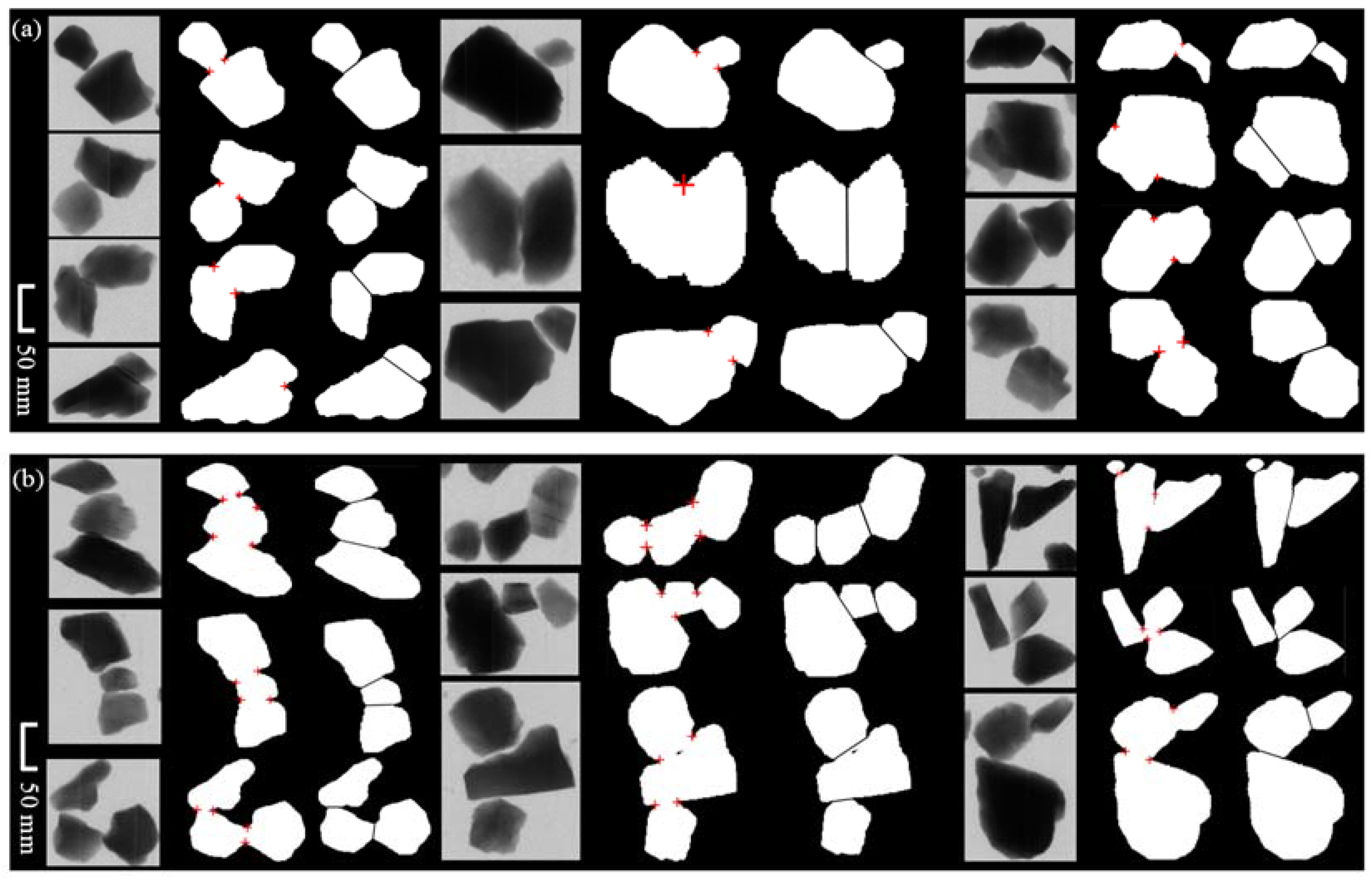
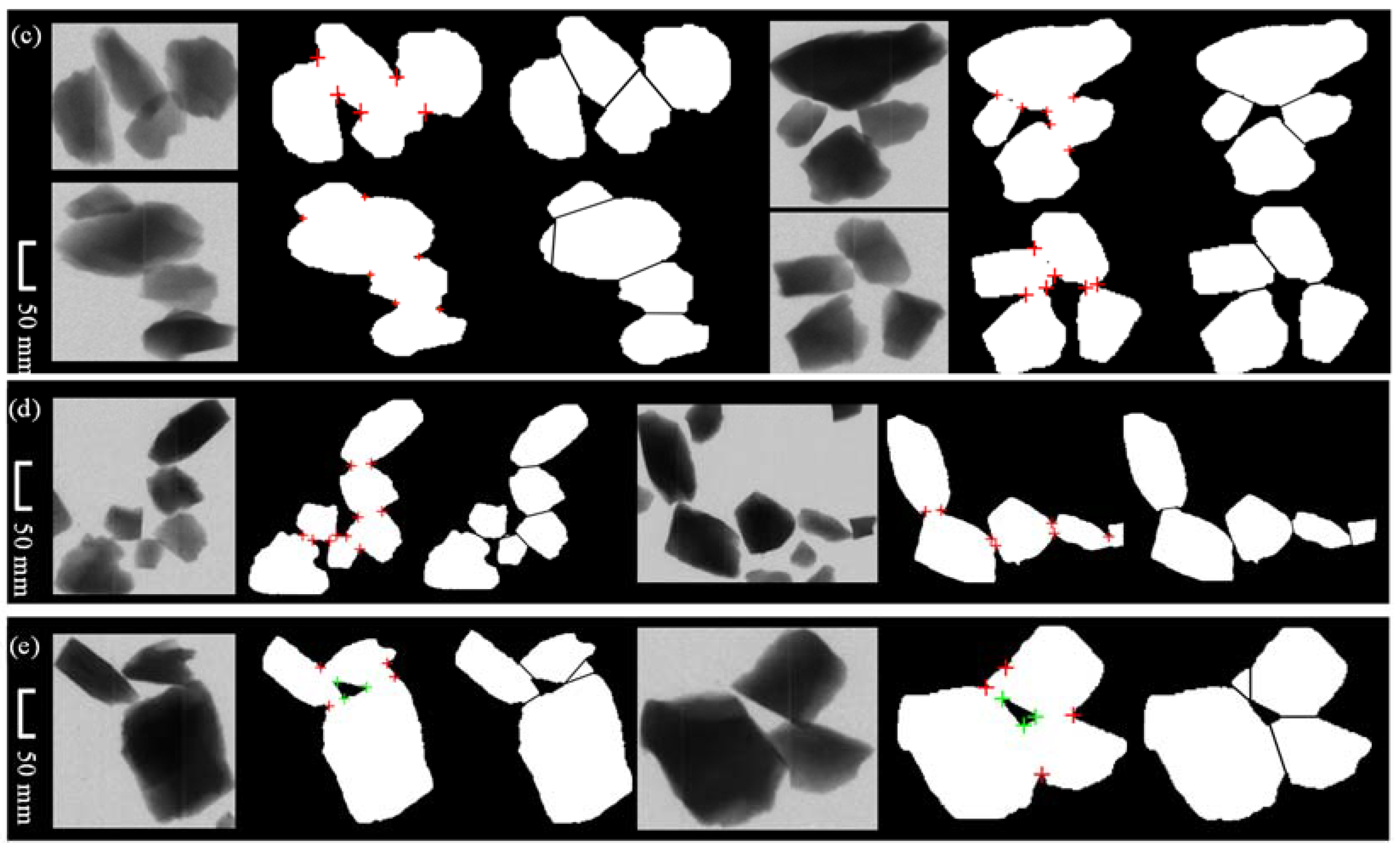
3.1. Pit Detection and Segmentation
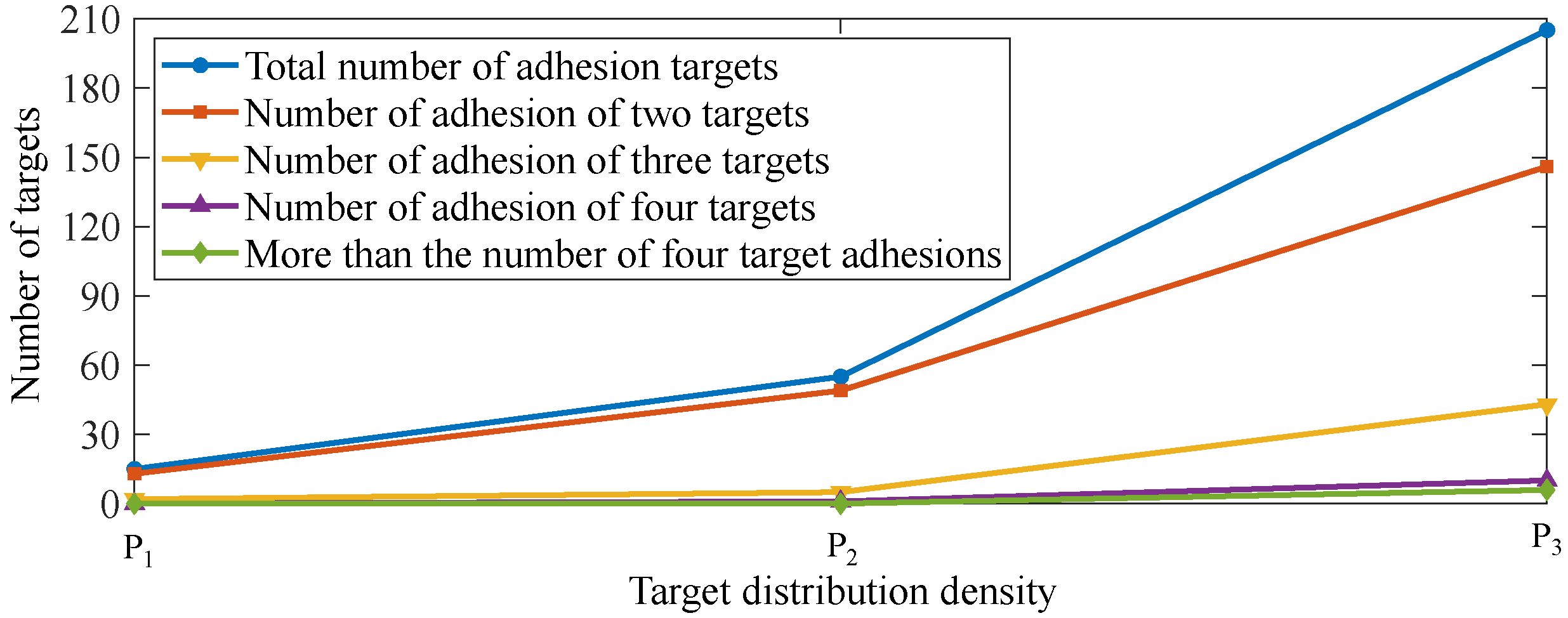
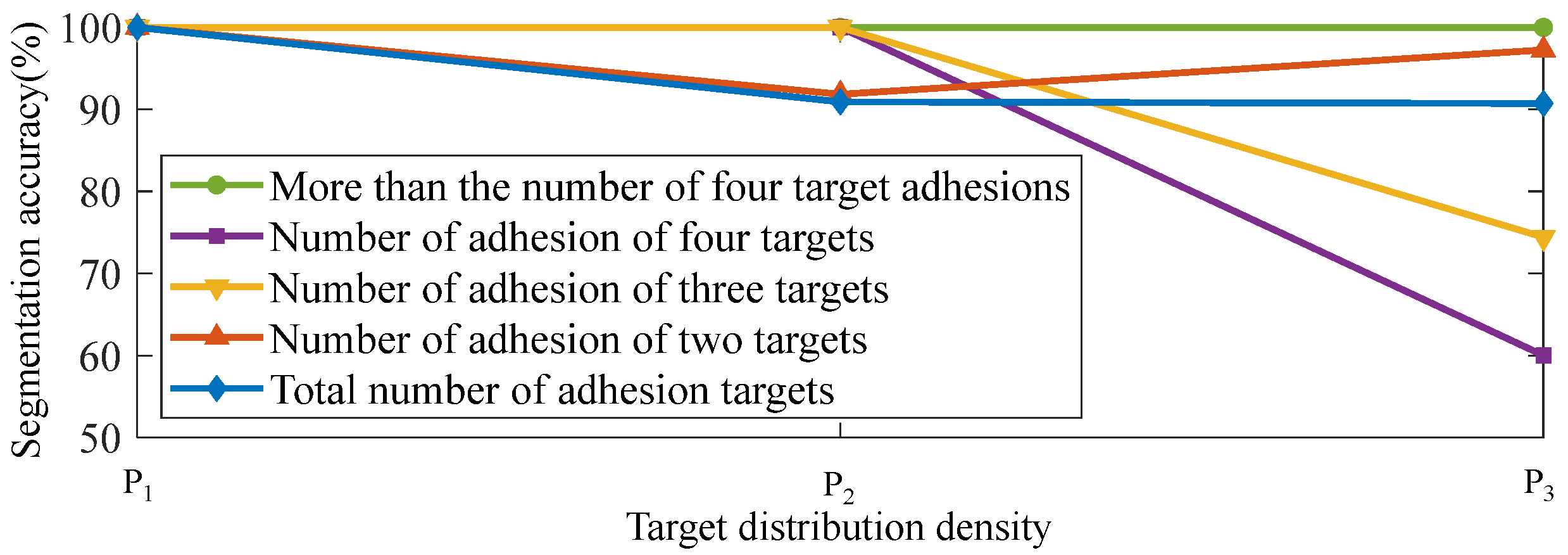
3.2. Experimental Validation
- (1)
- Irregular-shaped coal and gangue had concave defects, and more pits were detected, resulting in over-segmentation errors (Figure 18a);
- (2)
- Pit detection or minimum distance search method was adopted to obtain the wrong pit position and wrong dividing line (Figure 18b).
3.3. Experimental Comparison
3.4. Application in Research and Industry
4. Conclusions
- (1)
- Adhesion targets can be divided into OLA and CLA. Furthermore, OLA and CLA concave defects can be classified into CDECH and CDENCH. The method of judging OLA and CLA is proposed in this paper.
- (2)
- A pit detection and segmentation algorithm for overlapping and sticking targets is proposed. OLCA and CLCA are established, and conjugate lines detect pits. OLCA and CLCA detect CDECH and CDENCH, which can catch as many pits as possible. The minimum distance search method obtains the dividing line to complete the segmentation. The segmentation accuracy of the adhesion target was found to be 90.73%. It is especially suitable for the segmentation of double-target adhesion, and the highest segmentation accuracy reached 97.26%.
- (3)
- It is necessary to consider increasing the mechanism of pre-queuing coal and gangue to reduce the probability of overlapping and adhesion between large targets and small targets because the overlapping and adhesion of many large and small targets is the main factor that causes the low segmentation accuracy.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| OLA | Open-loop adhesion |
| CLA | Closed-loop adhesion |
| OLCA | Open-loop crossover algorithm |
| CLCA | Closed-loop crossover algorithm |
| CDECH | Concave defects at the edge of the convex hull |
| CDENCH | Concave defect at the edge of the non-convex hull |
| WA | Watershed algorithm |
| DE-XRT | Dual-energy X-ray transmission |
References
- Xie, Y.T.; Chi, X.W.; Li, H.Y.; Wang, F.W.; Yan, L.T.; Zhang, B.; Zhang, Q.J. Coal and Gangue Recognition Method Based on Local Texture Classification Network for Robot Picking. Appl. Sci. 2021, 11, 11495. [Google Scholar] [CrossRef]
- He, L.; Wang, S.; Guo, Y.C.; Hu, K.; Cheng, G.; Wang, X.Q. Study of raw coal identification method by dual-energy X-ray and dual-view visible light imaging. Int. J. Coal Prep. Util. 2022. [Google Scholar] [CrossRef]
- Liu, K.; Zhang, X.; Chen, Y.Q. Extraction of coal and gangue geometric features with multifractal detrending fluctuation analysis. Appl. Sci. 2018, 8, 463. [Google Scholar] [CrossRef]
- Guo, Y.C.; He, L.; Liu, P.Z.; Wang, X. Multi-dimensional analysis and recognition method of coal and gangue dual-energy X-ray images. J. China Coal Soc. 2021, 1, 300–309. [Google Scholar]
- Li, D.J.; Meng, G.Y.; Sun, Z.Y.; Xu, L.L. Autonomous Multiple Tramp Materials Detection in Raw Coal Using Single-Shot Feature Fusion Detector. Appl. Sci. 2021, 12, 107. [Google Scholar] [CrossRef]
- Shang, D.Y.; Wang, Y.W.; Yang, Z.Y.; Wang, J.J.; Liu, Y. Study on comprehensive calibration and image sieving for coal-gangue separation parallel robot. Appl. Sci. 2020, 10, 7059. [Google Scholar] [CrossRef]
- Li, M.; Duan, Y.; He, X.L.; Yang, M.L. Image positioning and identification method and system for coal and gangue sorting robot. Int. J. Coal Prep. Util. 2020, 42, 1759–1777. [Google Scholar] [CrossRef]
- Win, K.P.; Kitjaidure, Y.; Hamamoto, K.; Myo Aung, T. Computer-assisted screening for cervical cancer using digital image processing of pap smear images. Appl. Sci. 2020, 10, 1800. [Google Scholar] [CrossRef]
- He, L. Droplets Image Segmentation Method Based on Machine learning and Watershed. Converter 2021, 2021, 219–227. [Google Scholar]
- Cheng, P.; Liu, Y.K.; Gui, W.H.; Tang, Z.H.; Chen, Q. Bubble Image Segmentation Based on a Novel Watershed Algorithm With an Optimized Mark and Edge Constraint. IEEE Trans. Instrum. Meas. 2021, 71, 1–10. [Google Scholar]
- Sun, A.Y.; Jia, W.B.; Hei, D.Q.; Yang, Y.Y.; Cheng, K.; Li, J.T.; Wang, Z.L.; Tang, Y.J. Application of concave point matching algorithm in segmenting overlapping coal particles in X-ray images. Miner. Eng. 2021, 171, 107096. [Google Scholar] [CrossRef]
- Zhang, W.J.; Li, H.Q. Automated segmentation of overlapped nuclei using concave point detection and segment grouping. Pattern Recogn. 2017, 71, 349–360. [Google Scholar] [CrossRef]
- Tan, S.Y.; Ma, X.; Mai, Z.J.; Qi, L.; Wang, Y.W. Segmentation and counting algorithm for touching hybrid rice grains. Comput. Electron. Agric. 2019, 162, 493–504. [Google Scholar] [CrossRef]
- Bai, X.Z.; Sun, C.M.; Zhou, F.G. Splitting touching cells based on concave points and ellipse fitting. Pattern Recogn. 2009, 42, 2434–2446. [Google Scholar] [CrossRef]
- Bai, F.Y.; Fan, M.Q.; Yang, H.L.; Dong, L.P. Image segmentation method for coal particle size distribution analysis. Particuology 2021, 56, 163–170. [Google Scholar] [CrossRef]
- Ji, X.Q.; Li, Y.; Cheng, J.Z.; Yu, Y.H.; Wang, M.J. Cell image segmentation based on an improved watershed algorithm. In Proceedings of the 2015 8th International Congress on Image and Signal Processing (CISP), Shenyang, China, 14–16 October 2015. [Google Scholar]
- Wu, Y.; Wang, W.; Zhang, F.; Xiao, Z.T.; Wu, J.; Geng, L. Nanoparticle size measurement method based on improved watershed segmentation. In Proceedings of the 2018 International Conference on Electronics and Electrical Engineering Technology, Tianjin, China, 19–21 September 2018; pp. 232–237. [Google Scholar]
- Liang, X.M.; Tian, T.; Liu, W.T.; Niu, F.S. Flotation froth image segmentation based on highlight correction and parameter adaptation. Min. Metall. Explor. 2020, 37, 467–474. [Google Scholar] [CrossRef]
- Zhu, Q.D.; Liu, B.B.; Li, Y. Stacked Particle Size Measurement Method Based on Data Processing. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019. [Google Scholar]
- Perkins, J.; Williams, O.; Wu, T.; Lester, E. Automated image analysis techniques to characterise pulverised coal particles and predict combustion char morphology. Fuel 2020, 259, 116022. [Google Scholar] [CrossRef]
- Furat, O.; Wang, M.Y.; Neumann, M.; Petrich, L.; Weber, M.; Krill III, C.E.; Schmidt, V. Machine learning techniques for the segmentation of tomographic image data of functional materials. Front. Mater. 2019, 6, 145. [Google Scholar] [CrossRef]
- Furat, O.; Leißner, T.; Ditscherlein, R.; Šedivý, O.; Weber, M.; Bachmann, K.; Schmidt, V. Description of ore particles from X-ray microtomography (XMT) images, supported by scanning electron microscope (SEM)-based image analysis. Microsc. Microanal. 2018, 5, 461–470. [Google Scholar] [CrossRef]
- Wang, Z.; Li, D.Y.; Zheng, X.; Xie, D.D. A Novel Coal Dust Characteristic Extraction to Enable Particle Size Analysis. IEEE Trans. Instrum. Meas. 2021, 70, 1–12. [Google Scholar] [CrossRef]
- Farhan, M.; Yli-Harja, O.; Niemistö, A. A novel method for splitting clumps of convex objects incorporating image intensity and using rectangular window-based concavity point-pair search. Pattern Recogn. 2013, 46, 741–751. [Google Scholar] [CrossRef]
- Lin, X.M.; Chen, Y.B. Application of concave point matching algorithm in rice image segmentation. J. Qujing Norm. Univ. 2018, 3, 36–39. [Google Scholar]
- Zhang, R.H.; Wu, J. Segmentation algorithm of adherent cells based on edge chain code information. J. Beijing Inst. Technol. 2013, 7, 747–753. [Google Scholar]
- Bai, Y.F.; Yang, M.L.; Zhang, X.; Lin, J. Concave matching segmentation algorithm for multi-bee overlapping images. Chin. J. Agric. Chem. 2020, 6, 188–193. [Google Scholar]
- Sklansky, J. Finding the convex hull of a simple polygon. Pattern Recogn. Lett. 1982, 2, 79–83. [Google Scholar] [CrossRef]
- Zhang, B.Q.; Qiu, Y.L.; Wang, X.Y.; Lu, H.S.; Wang, F.J. Research on the Method of Individual Identification of Chickens Based on Depth Image. J. Phys. Conf. Ser. 2020, 1631, 012018. [Google Scholar] [CrossRef]
- Gao, H.; Zhen, T.; Li, Z.H. Overview of segmentation methods of conglutinated particle images. Chin. J. Cereals Oils 2022, 37, 1–14. [Google Scholar]
- Wu, K. Image segmentation of conglutinated rocks combining level set and watershed. Inf. Commun. 2018, 3, 141–142. [Google Scholar]
- He, L.; Wang, S.; Guo, Y.C.; Cheng, G.; Hu, K.; Zhao, Y.Q.; Wang, X. Multi-scale coal and gangue dual-energy X-ray image concave point detection and segmentation algorithm. Measurement 2022, 196, 111041. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Comparison of Segmentation Methods | Adhesion Target | 2-Adhesion | 3-Adhesion | 4-Adhesion | >4-Adhesion | CLA | |
|---|---|---|---|---|---|---|---|
| Method 1 | Total | 274 | 127 | 103 | 31 | 13 | 4 |
| Correct | 203 | 102 | 78 | 18 | 5 | 3 | |
| Over-segmentation | 40 | 14 | 16 | 5 | 5 | 1 | |
| Under-segmentation | 31 | 11 | 9 | 8 | 3 | 0 | |
| Accuracy % | 74.08 | 80.31 | 75.72 | 58.01 | 38.46 | 75 | |
| Method 2 | Correct | 177 | 84 | 72 | 17 | 4 | 1 |
| Over-segmentation | 51 | 32 | 11 | 5 | 3 | 0 | |
| Under-segmentation | 46 | 11 | 20 | 9 | 6 | 3 | |
| Accuracy % | 64.59 | 66.14 | 69.90 | 54.83 | 30.76 | 25 | |
| Method 3 | Correct | 232 | 122 | 87 | 18 | 5 | 2 |
| Over-segmentation | 7 | 5 | 1 | 1 | 0 | 0 | |
| Under-segmentation | 35 | 0 | 15 | 12 | 8 | 2 | |
| Accuracy % | 84.67 | 96.06 | 84.46 | 58.01 | 38.46 | 50 | |
| Method 4 | Correct | 250 | 123 | 93 | 24 | 10 | 3 |
| Over-segmentation | 6 | 4 | 1 | 1 | 0 | 1 | |
| Under-segmentation | 18 | 0 | 9 | 6 | 3 | 0 | |
| Accuracy % | 91.24 | 96.85 | 90.29 | 77.42 | 76.92 | 75 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, L.; Wang, S.; Guo, Y. Detection of Pits by Conjugate Lines: An Algorithm for Segmentation of Overlapping and Adhesion Targets in DE-XRT Sorting Images of Coal and Gangue. Appl. Sci. 2022, 12, 9850. https://doi.org/10.3390/app12199850
He L, Wang S, Guo Y. Detection of Pits by Conjugate Lines: An Algorithm for Segmentation of Overlapping and Adhesion Targets in DE-XRT Sorting Images of Coal and Gangue. Applied Sciences. 2022; 12(19):9850. https://doi.org/10.3390/app12199850
Chicago/Turabian StyleHe, Lei, Shuang Wang, and Yongcun Guo. 2022. "Detection of Pits by Conjugate Lines: An Algorithm for Segmentation of Overlapping and Adhesion Targets in DE-XRT Sorting Images of Coal and Gangue" Applied Sciences 12, no. 19: 9850. https://doi.org/10.3390/app12199850