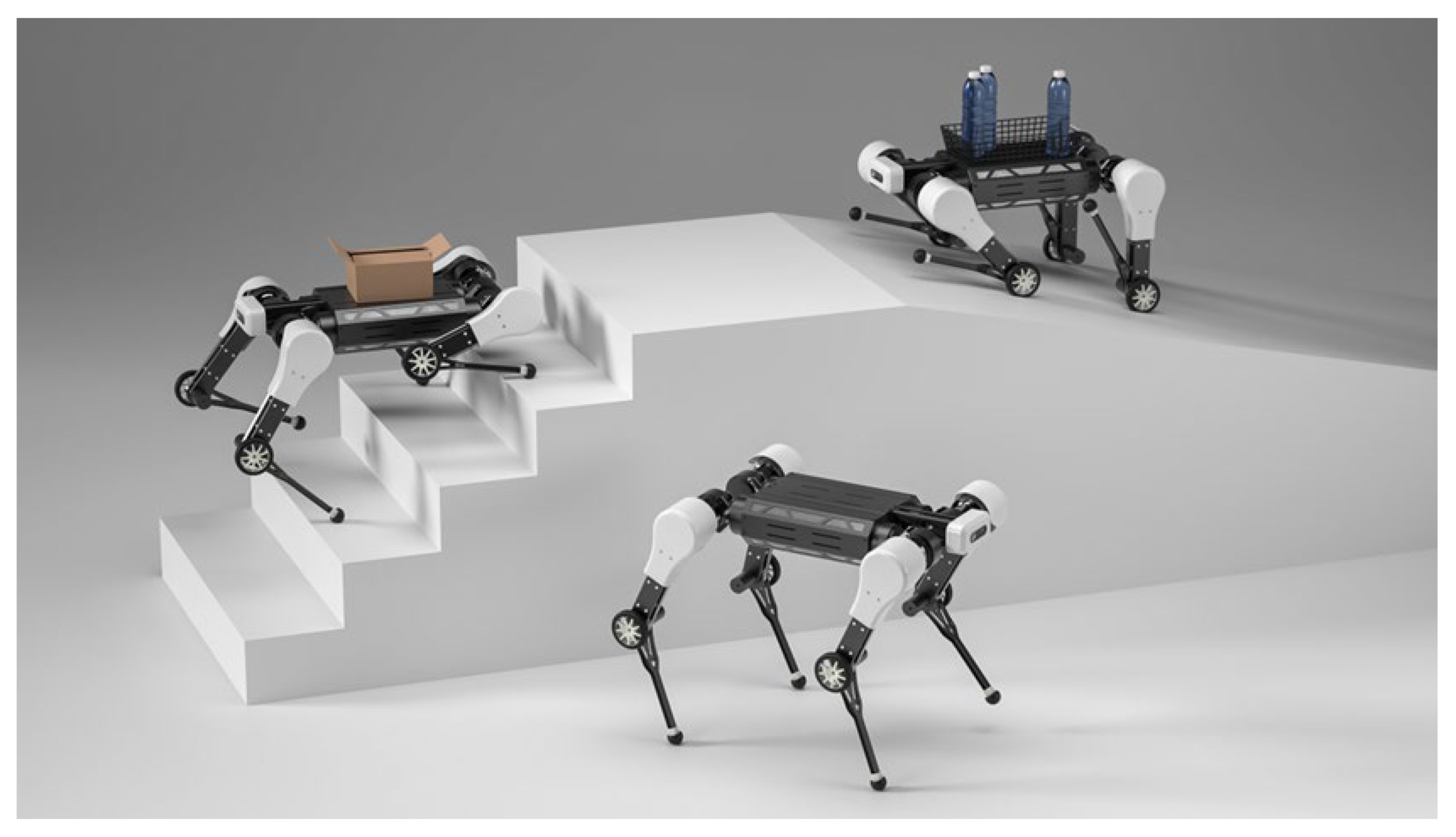
Figure 1.
The design of the quadruped-assistive-robot platform. The wheel-footed robot can carry items while keeping the torso horizontal.
Figure 1.
The design of the quadruped-assistive-robot platform. The wheel-footed robot can carry items while keeping the torso horizontal.
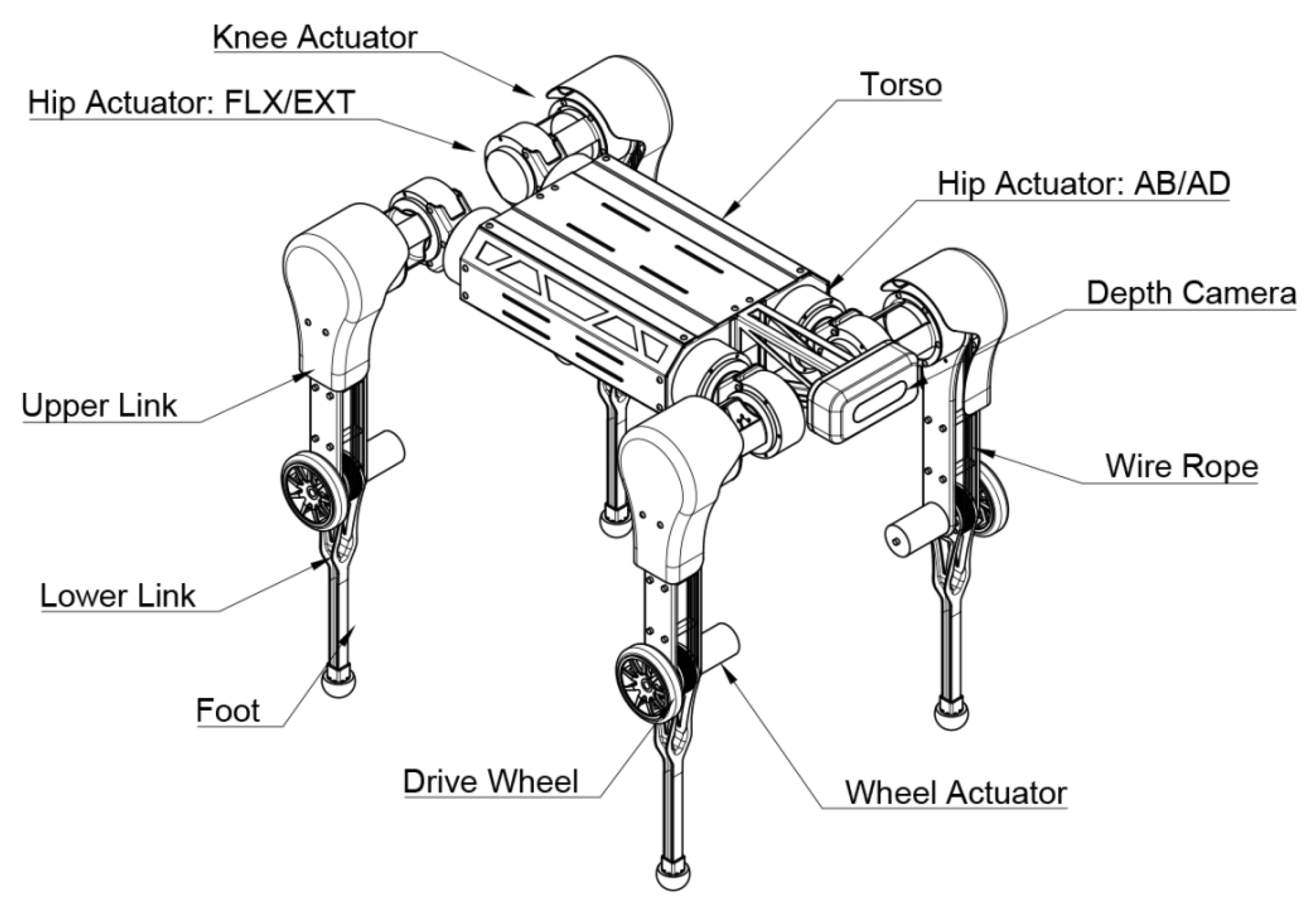
Figure 2.
The designed structure of the robot platform.
Figure 2.
The designed structure of the robot platform.
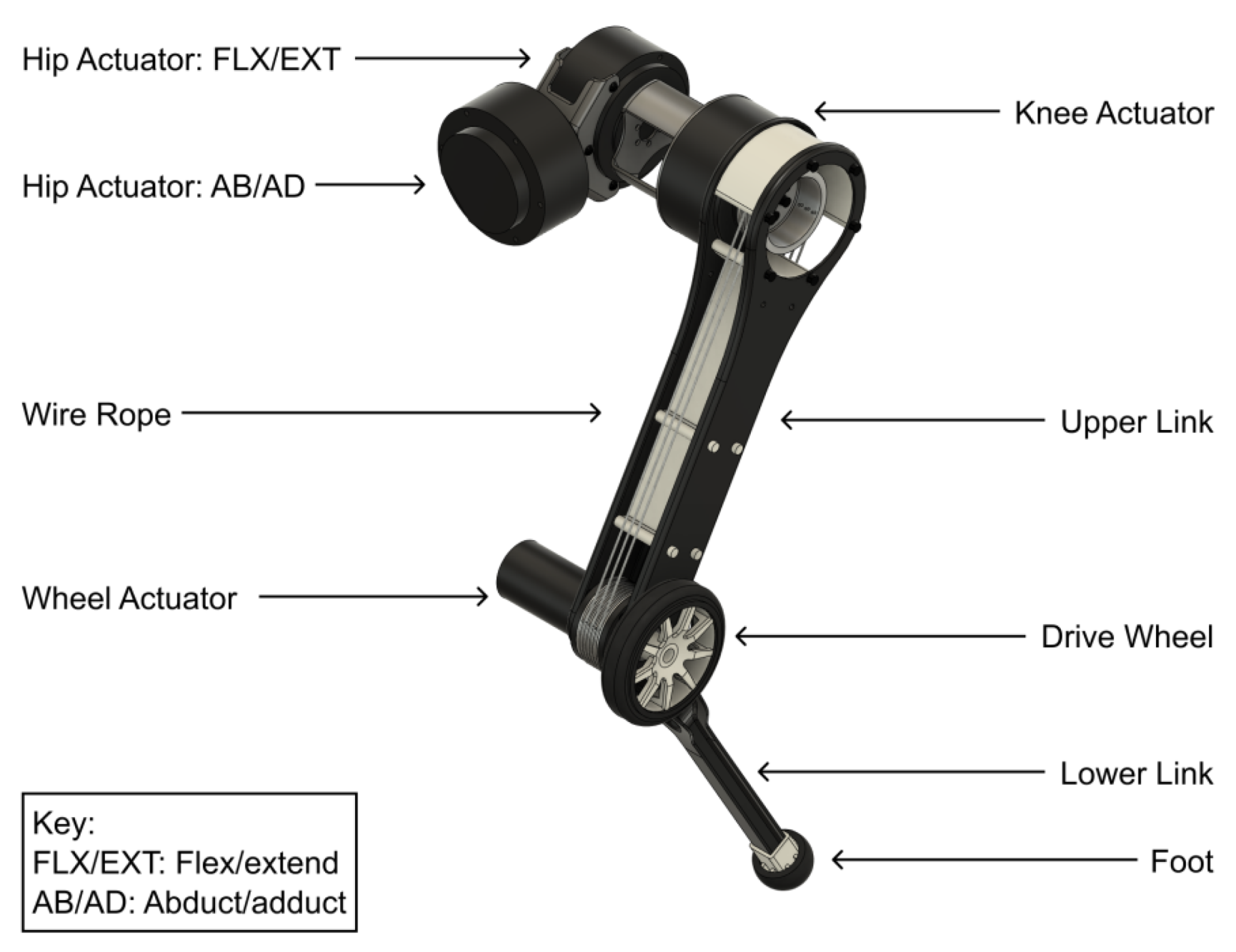
Figure 3.
The designed structure of a robot leg.
Figure 3.
The designed structure of a robot leg.
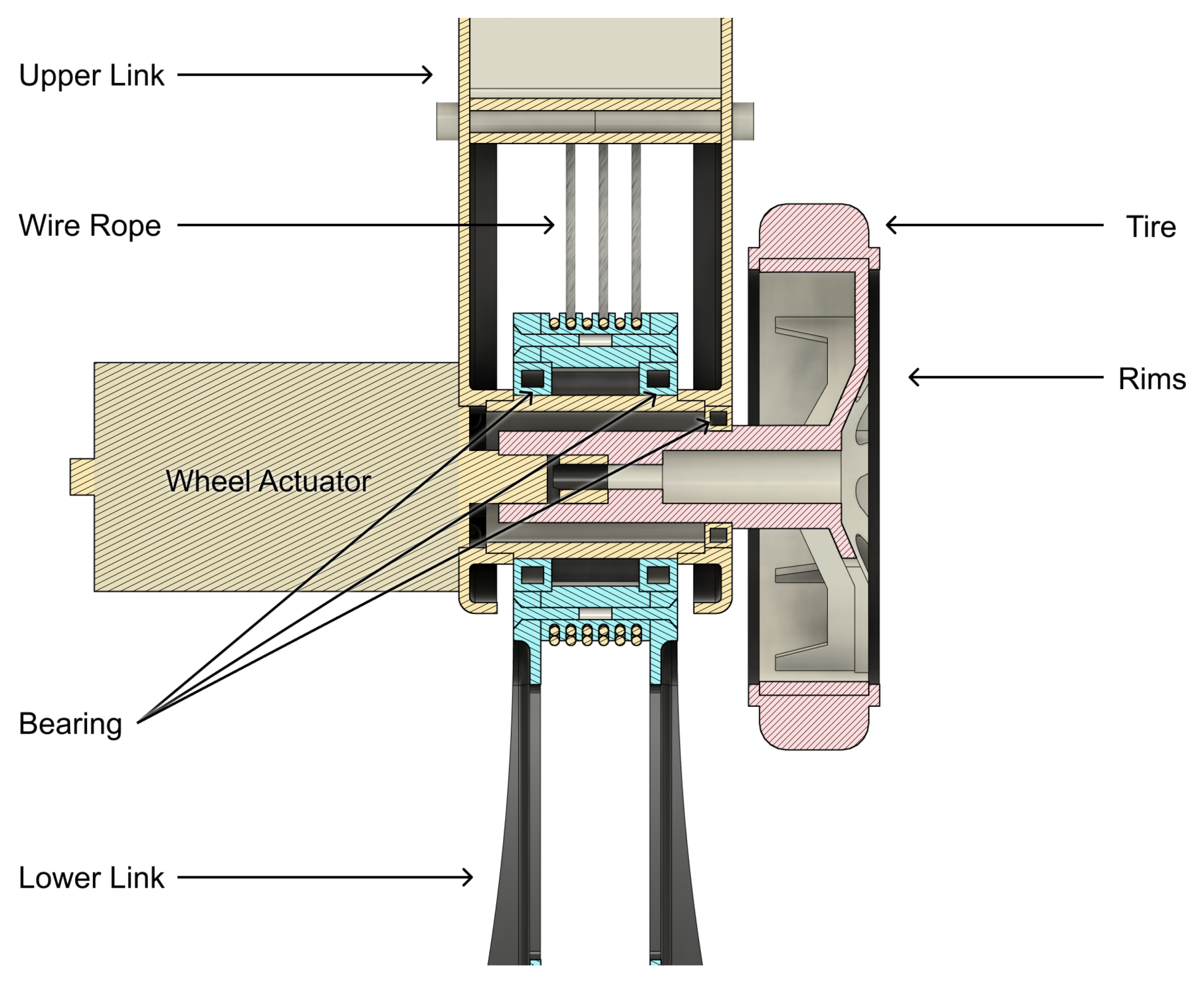
Figure 4.
The designed structure of the robot knee.
Figure 4.
The designed structure of the robot knee.
Figure 5.
The roped transmission structure. The radius does not change in the designed activities.
Figure 5.
The roped transmission structure. The radius does not change in the designed activities.
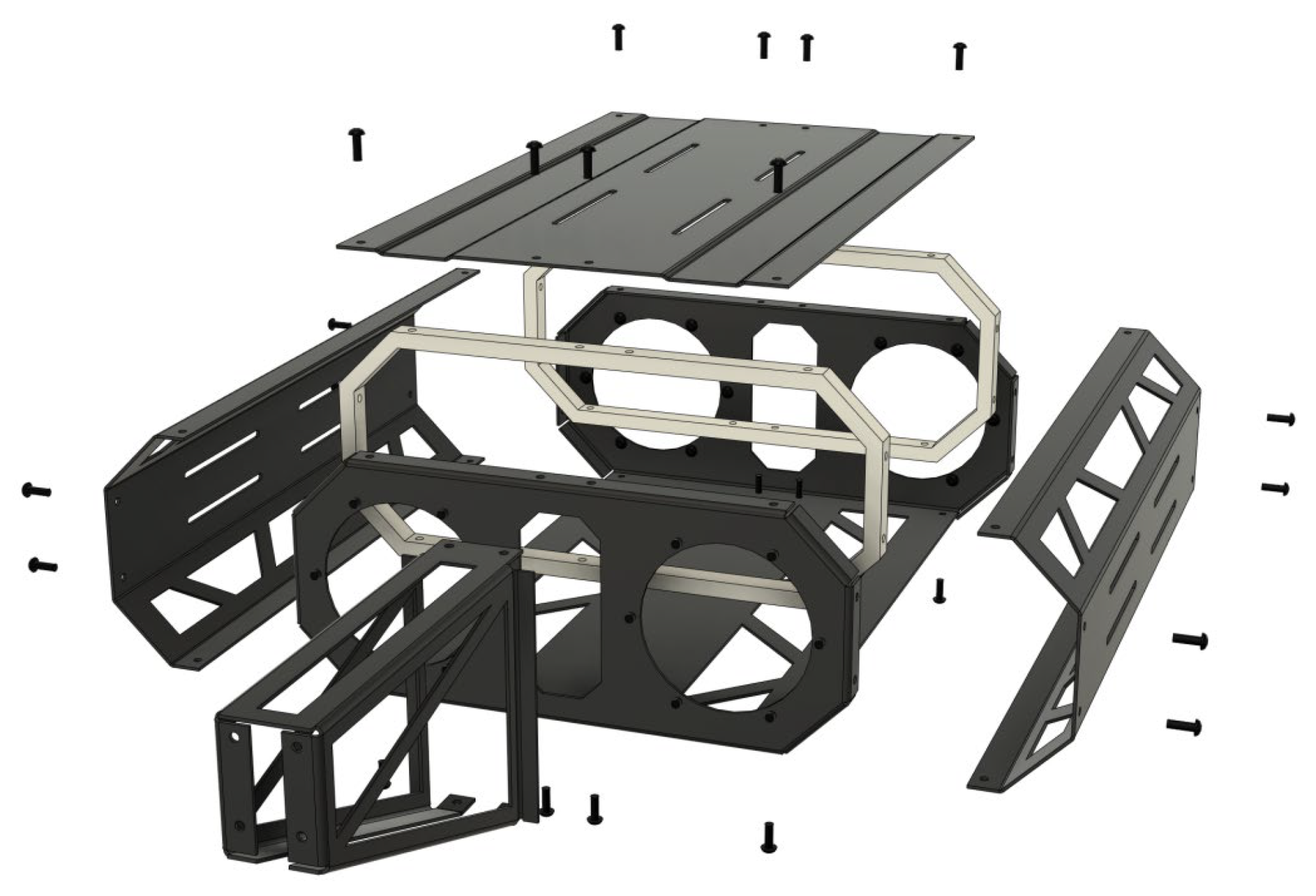
Figure 6.
Exploded view of the structure of each robot leg.
Figure 6.
Exploded view of the structure of each robot leg.
Figure 7.
Exploded view of the structure of the torso.
Figure 7.
Exploded view of the structure of the torso.
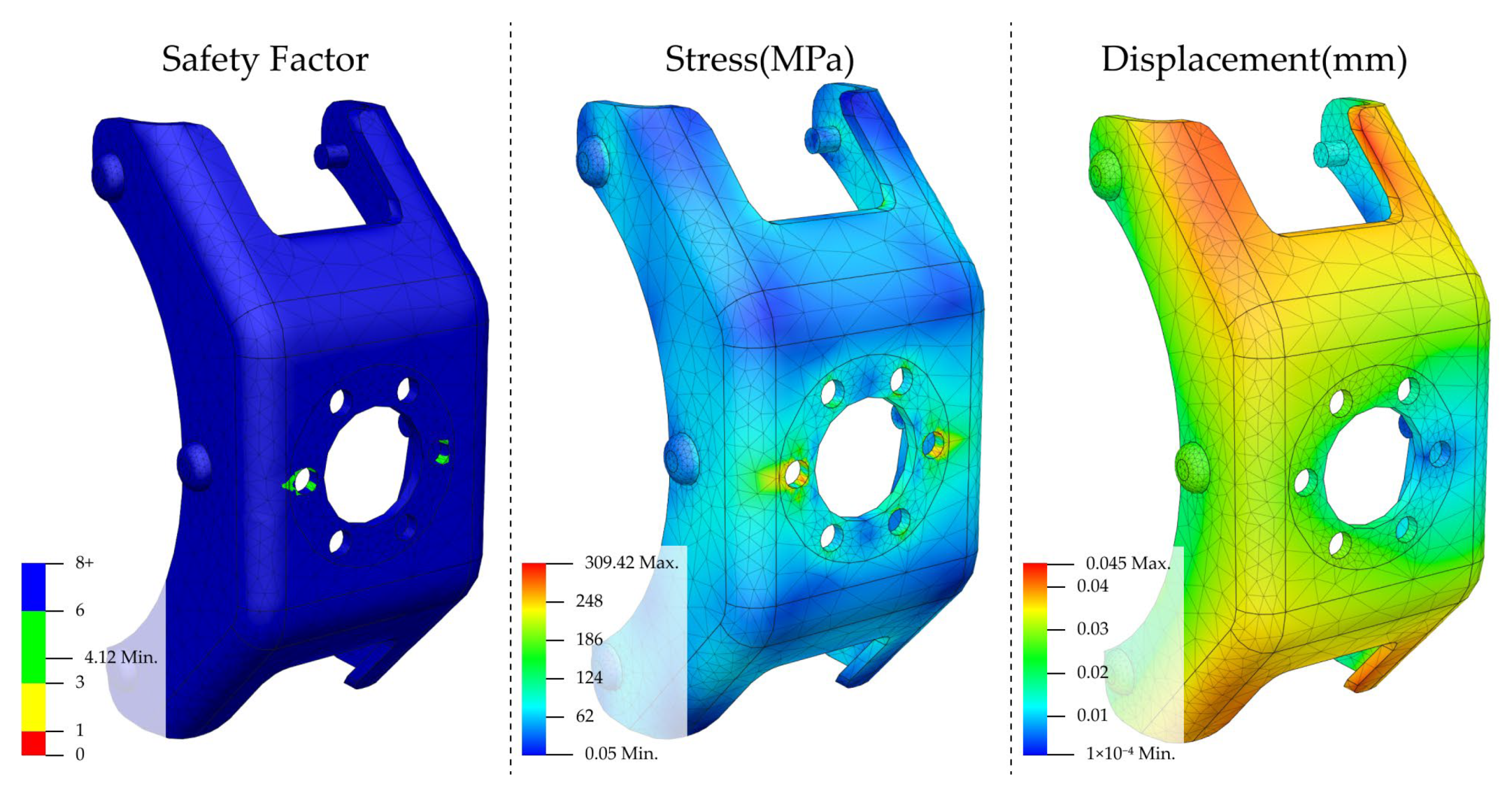
Figure 8.
Analysis of condition 1 for hip connector 1. From left to right are the safety factor, stress, and displacement.
Figure 8.
Analysis of condition 1 for hip connector 1. From left to right are the safety factor, stress, and displacement.
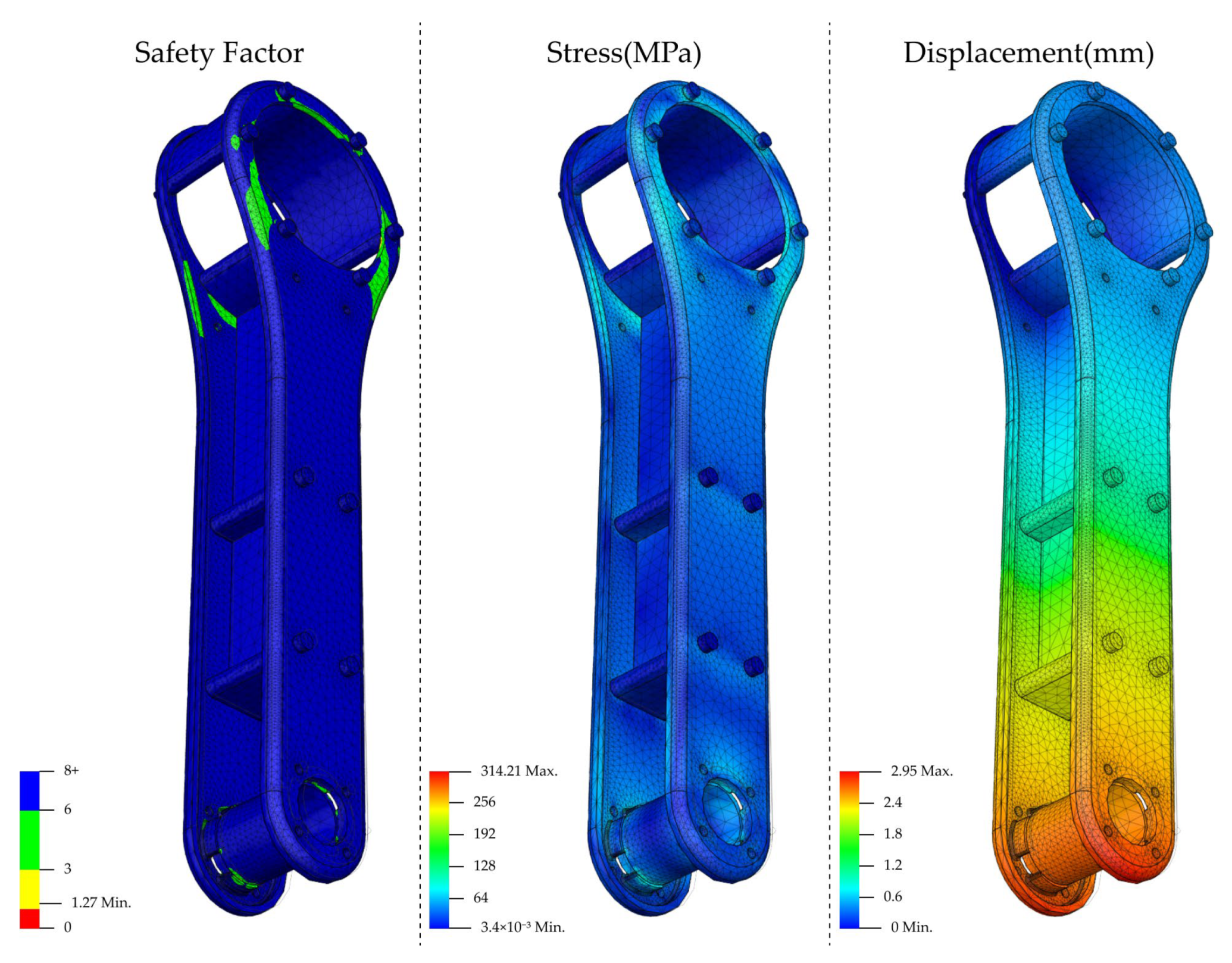
Figure 9.
Analysis of condition 2 for hip connector 1. From left to right are safety factor, stress, and displacement.
Figure 9.
Analysis of condition 2 for hip connector 1. From left to right are safety factor, stress, and displacement.
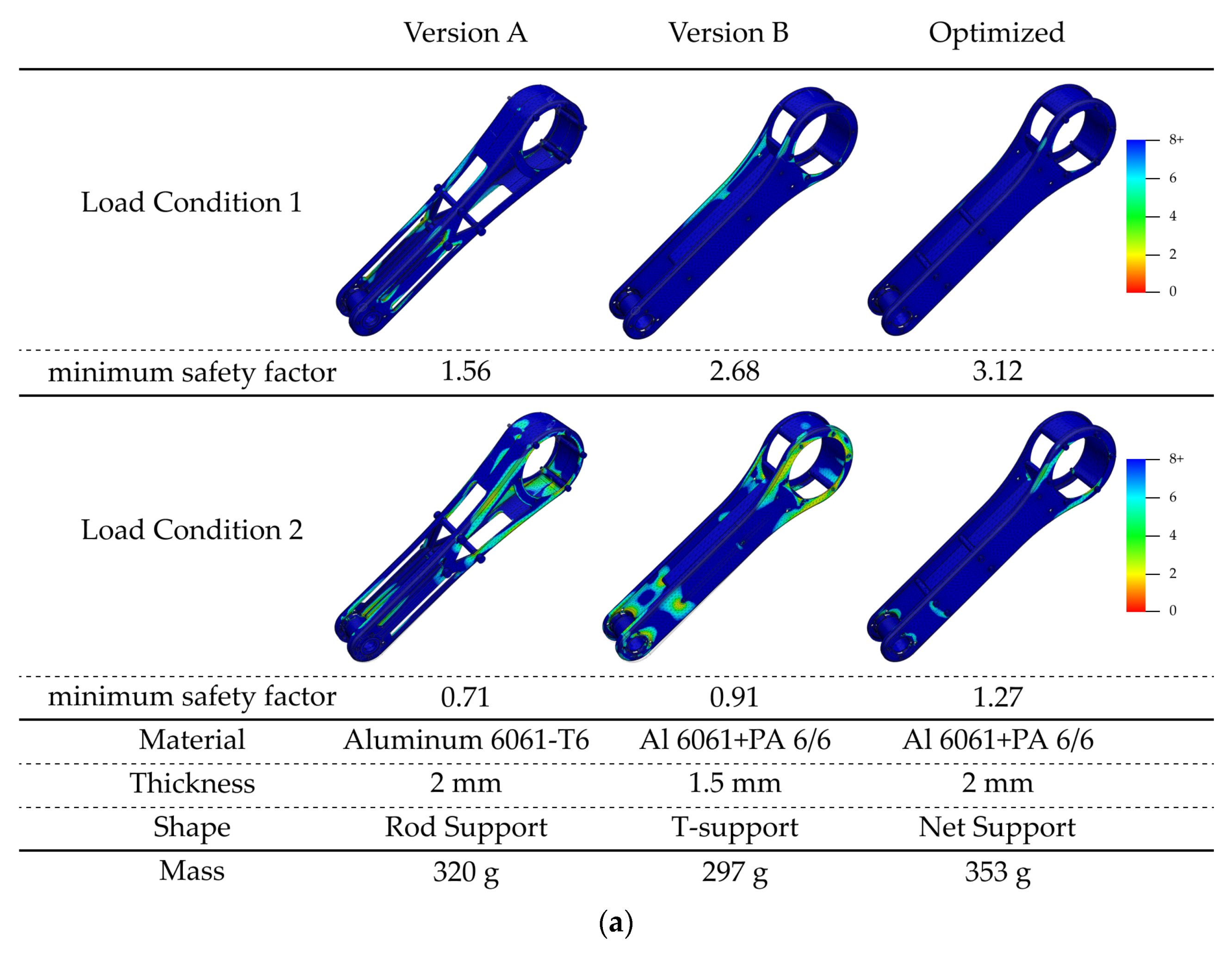
Figure 10.
Optimization process of hip connector 1. The part has a thickness limit, so the strength needs are met by changing the material.
Figure 10.
Optimization process of hip connector 1. The part has a thickness limit, so the strength needs are met by changing the material.
Figure 11.
Analysis of condition 1 for hip connector 2. From left to right are safety factor, stress, and displacement.
Figure 11.
Analysis of condition 1 for hip connector 2. From left to right are safety factor, stress, and displacement.
Figure 12.
Analysis of condition 2 for hip connector 2. From left to right are safety factor, stress, and displacement.
Figure 12.
Analysis of condition 2 for hip connector 2. From left to right are safety factor, stress, and displacement.
Figure 13.
Optimization process of hip connector 2.
Figure 13.
Optimization process of hip connector 2.
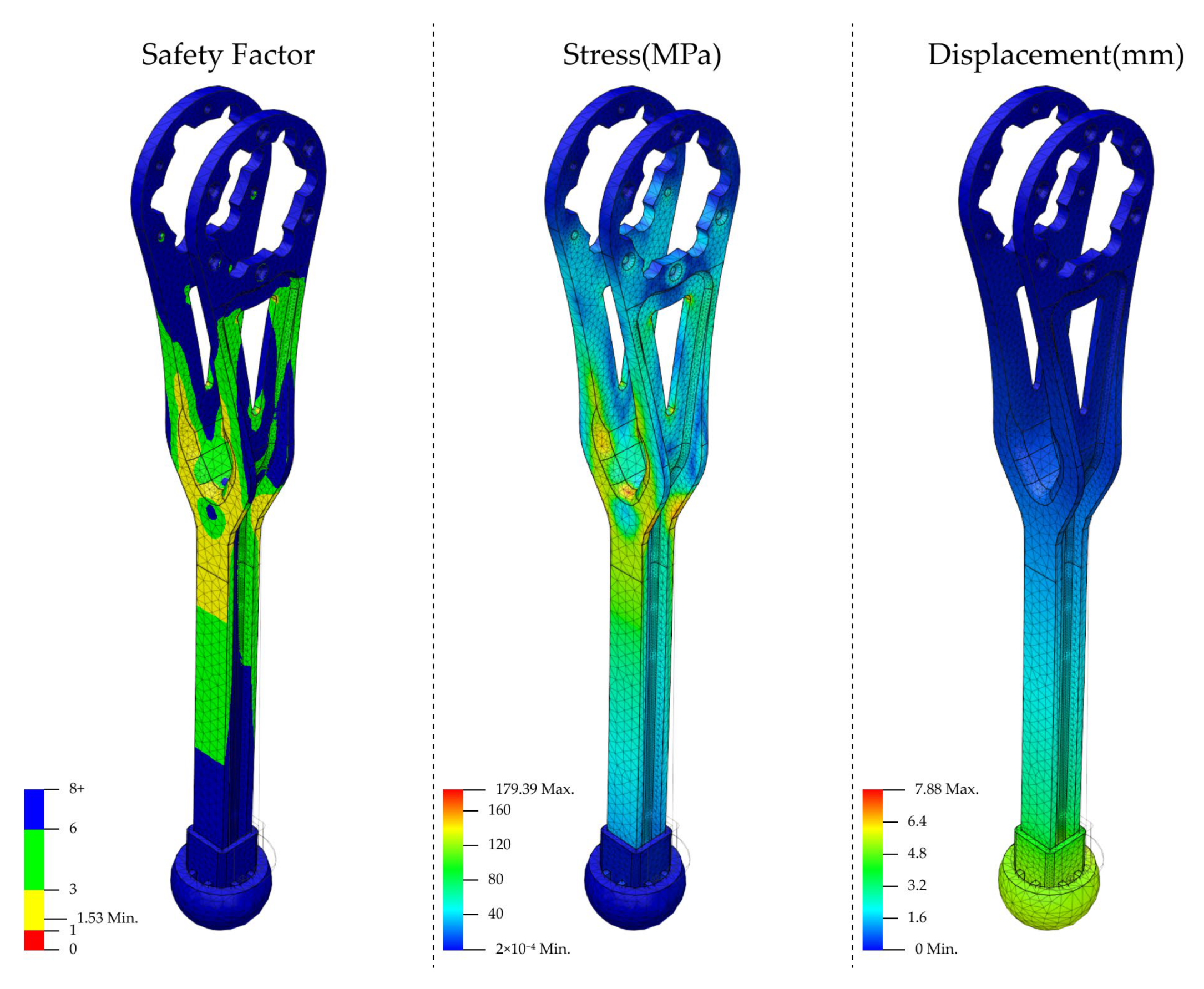
Figure 14.
Analysis of condition 1 for the upper link. From left to right are the safety factor, stress, and displacement.
Figure 14.
Analysis of condition 1 for the upper link. From left to right are the safety factor, stress, and displacement.
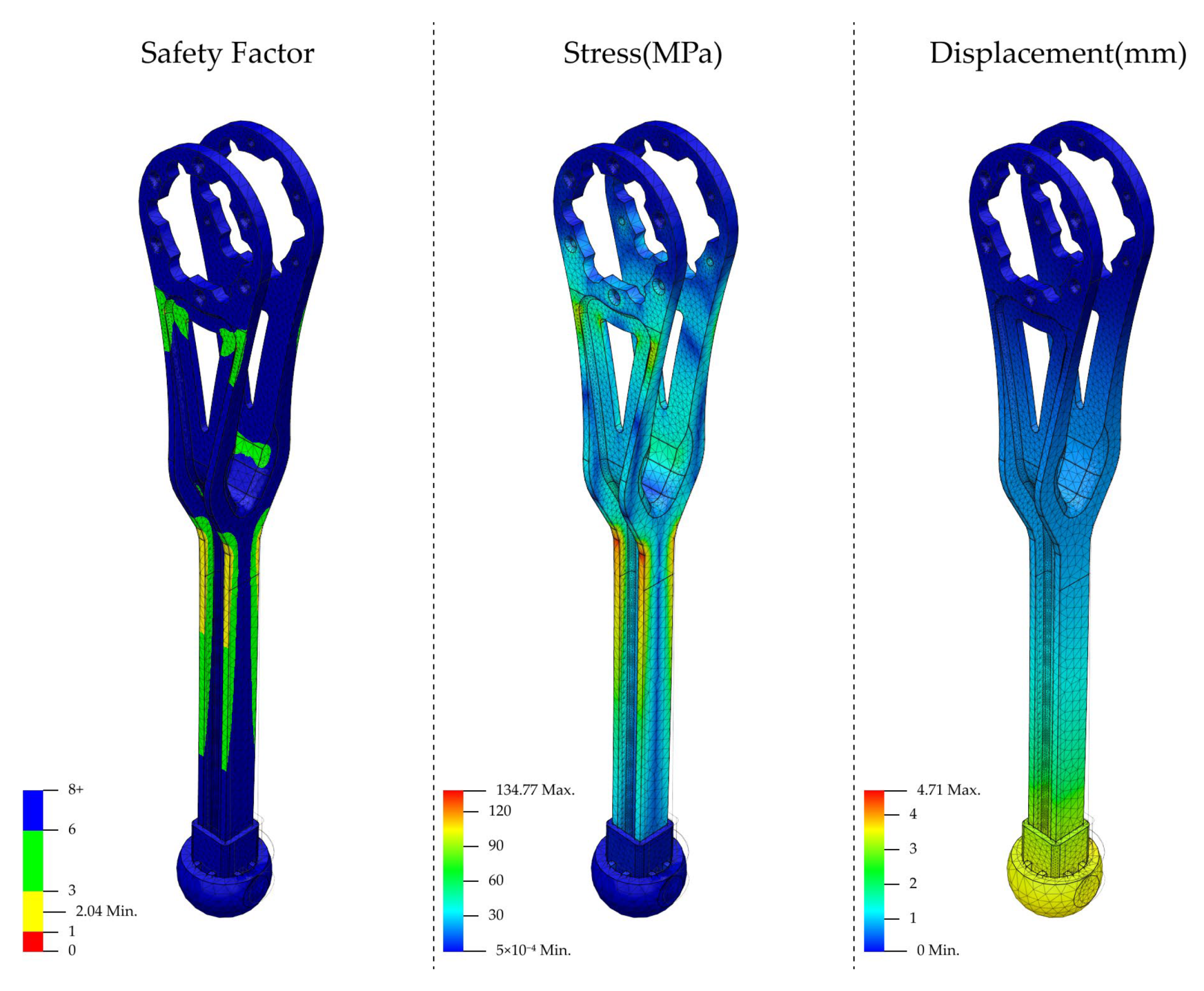
Figure 15.
Analysis of condition 2 for the upper link. From left to right are the safety factor, stress, and displacement.
Figure 15.
Analysis of condition 2 for the upper link. From left to right are the safety factor, stress, and displacement.
Figure 16.
Optimization process for hip connector 2: (a) effect of different shapes on strength; (b) detailed display of different shapes.
Figure 16.
Optimization process for hip connector 2: (a) effect of different shapes on strength; (b) detailed display of different shapes.
Figure 17.
Analysis of condition 1 for the lower link. From left to right are safety factor, stress, and displacement.
Figure 17.
Analysis of condition 1 for the lower link. From left to right are safety factor, stress, and displacement.
Figure 18.
Analysis of condition 2 for lower link. From left to right are safety factor, stress, and displacement.
Figure 18.
Analysis of condition 2 for lower link. From left to right are safety factor, stress, and displacement.
Figure 19.
Drive wheel analysis. From left to right are the safety factor, stress, and displacement.
Figure 19.
Drive wheel analysis. From left to right are the safety factor, stress, and displacement.
Figure 20.
Torso shell analysis. From left to right are safety factor, stress, and displacement.
Figure 20.
Torso shell analysis. From left to right are safety factor, stress, and displacement.
Figure 21.
The step circle of each move: (a) The process of a step can be divided into five individual time phases, and the robot can form a complete action by linear interpolation between six positions and poses; (b) when the robot ascends the stairs, it completes a step of the left hind foot, and the trajectory of the torso and the step foot.
Figure 21.
The step circle of each move: (a) The process of a step can be divided into five individual time phases, and the robot can form a complete action by linear interpolation between six positions and poses; (b) when the robot ascends the stairs, it completes a step of the left hind foot, and the trajectory of the torso and the step foot.
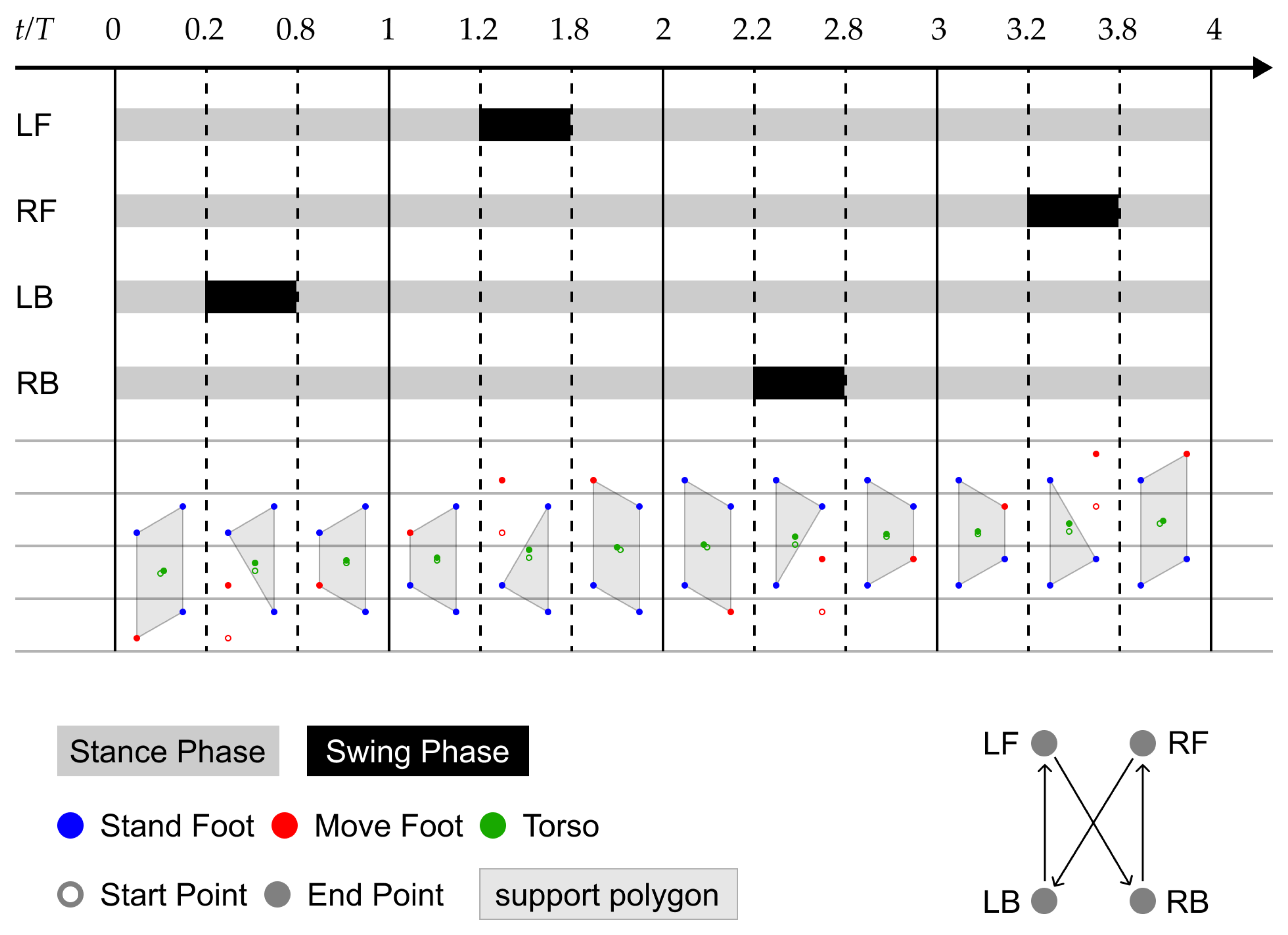
Figure 22.
Gait cycle. During the time, each of the four legs of the robot completes a step movement in sequence.
Figure 22.
Gait cycle. During the time, each of the four legs of the robot completes a step movement in sequence.
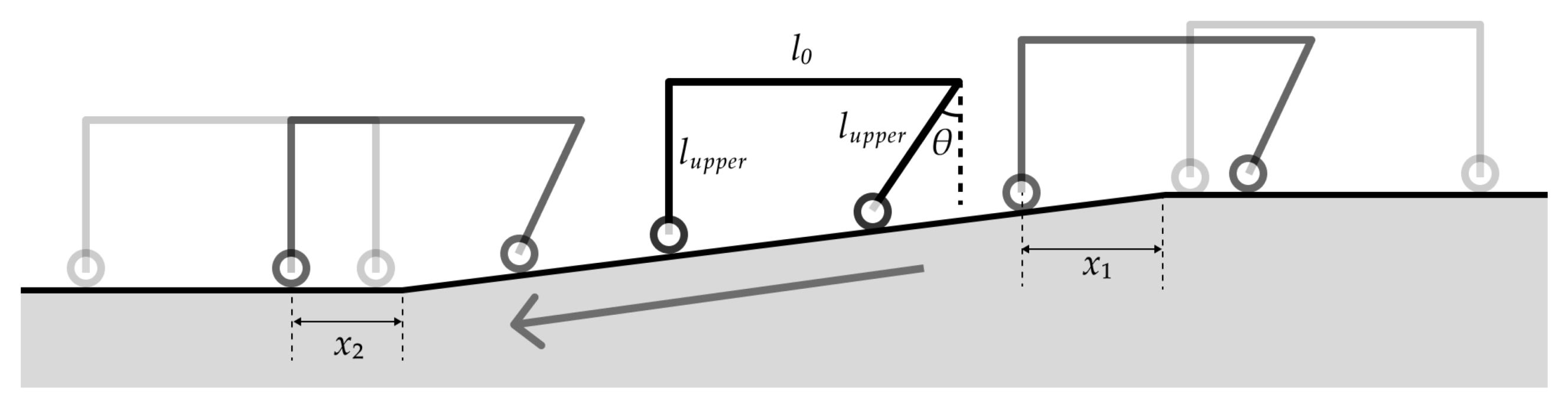
Figure 23.
Motion planning for downward movement; by adjusting , the torso can keep its horizontal pose.
Figure 23.
Motion planning for downward movement; by adjusting , the torso can keep its horizontal pose.
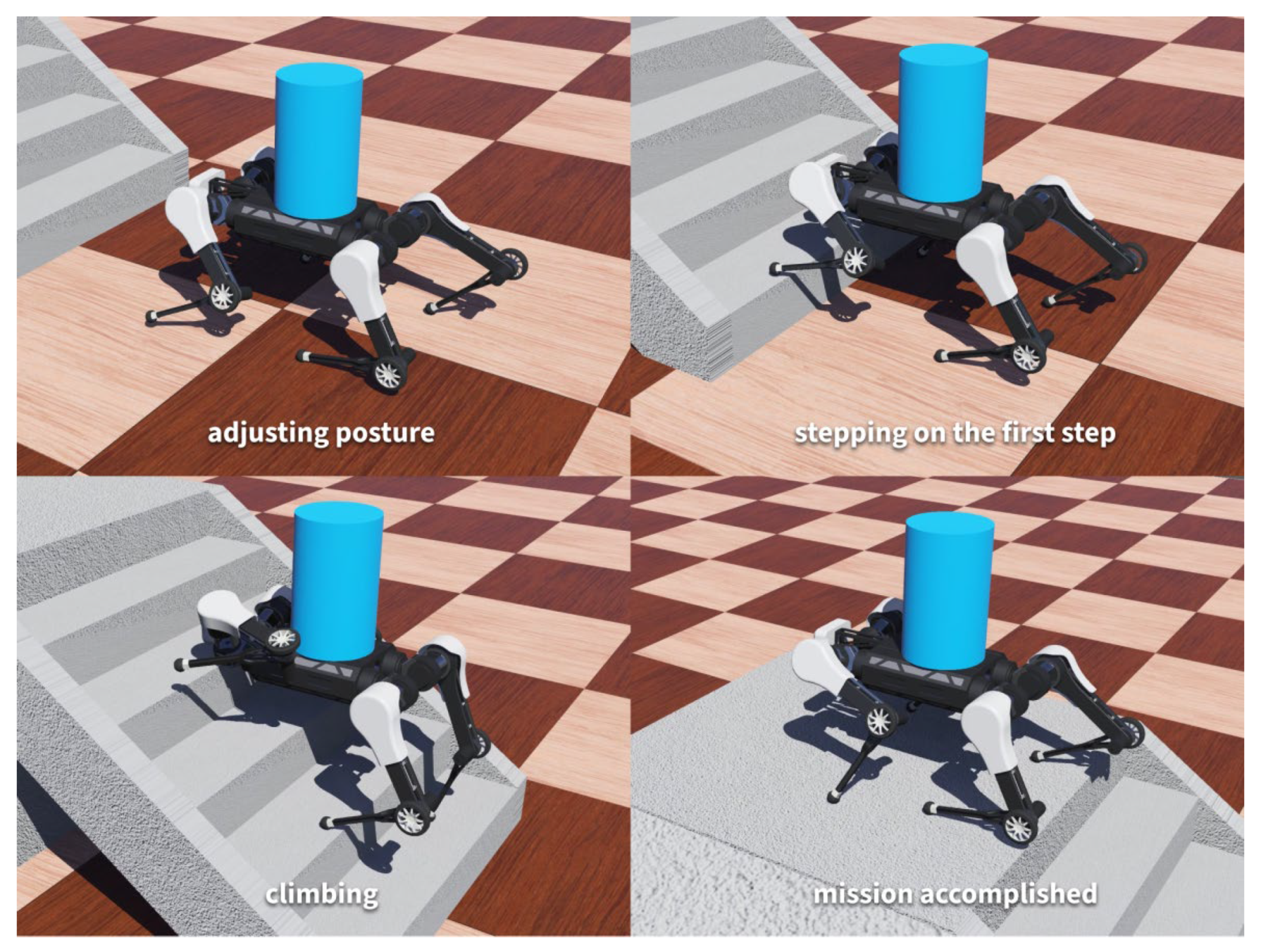
Figure 24.
Simulation task. At 16.940 s, the robot stepped on the first step; at 46.085 s, the robot fully landed on the platform.
Figure 24.
Simulation task. At 16.940 s, the robot stepped on the first step; at 46.085 s, the robot fully landed on the platform.
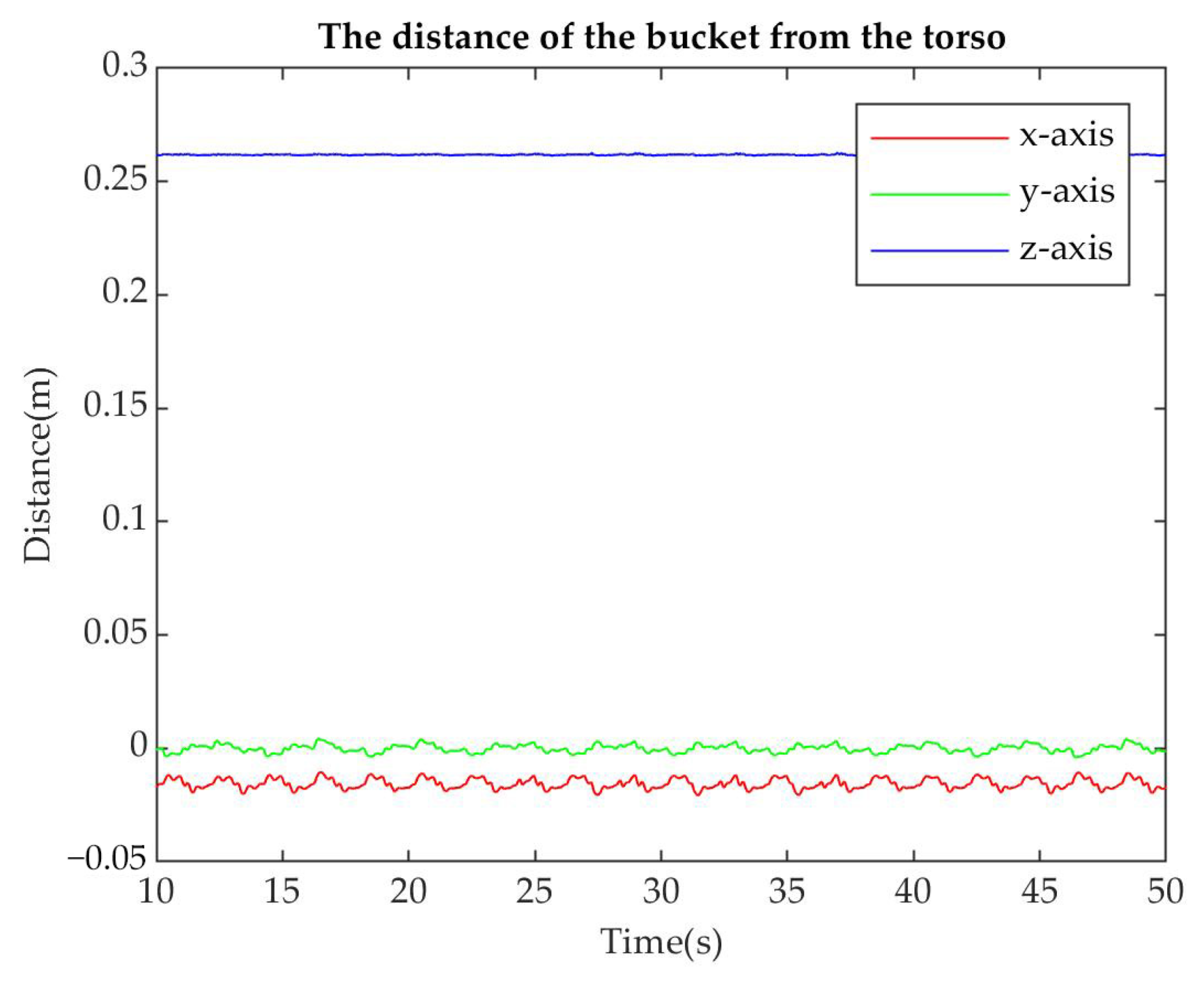
Figure 25.
Bucket position changes between 10 and 50 s. The bucket has periodic small movements in the y direction, nearly uniform linear movement in the x direction, and smooth movement in the z direction.
Figure 25.
Bucket position changes between 10 and 50 s. The bucket has periodic small movements in the y direction, nearly uniform linear movement in the x direction, and smooth movement in the z direction.
Figure 26.
Relative movement of the bucket and torso. In the case of the bucket being not fixed, only a slight slippage occurs above the robot.
Figure 26.
Relative movement of the bucket and torso. In the case of the bucket being not fixed, only a slight slippage occurs above the robot.
Figure 27.
Joint torque of the left front leg. Most of the time, the output torque of the actuator is within the recommended range. When climbing the stairs, hip FLX/EXT actuator periodically outputs maximum torque for short periods of time.
Figure 27.
Joint torque of the left front leg. Most of the time, the output torque of the actuator is within the recommended range. When climbing the stairs, hip FLX/EXT actuator periodically outputs maximum torque for short periods of time.
Table 1.
Work scenes, force transmissions, and mobility features of relevant quadruped robots.
Table 1.
Work scenes, force transmissions, and mobility features of relevant quadruped robots.
| Robot | Working Scene | Force Transmission | Mobility Method |
|---|
| Kirin [17] | Transport, Heavy duty | Electric Actuators | Legs/Lifts |
| HyQ2Max [18] | Universal, Heavy duty | Hydraulic Actuators | Legs |
| Swiss-Mile [19] | Universal, Heavy duty | Electric Actuators/Hybrid | Wheels on feet/legs |
| ANYmal [20] | Universal, Medium duty | Electric Actuators | Legs |
| Mini cheetah [21] | Swift, Universal, Light duty | E-Actuators | Legs |
| Lywal [22] | Transport, Medium duty | Electric Actuators/Hybrid | Wheels/Claws/Legs |
| Ours | Assistive, Medium duty | Low-Cost Actuators/Ligament Wired, Low cost | Wheels on knees/legs |
Table 2.
Physical parameters of the robot.
Table 2.
Physical parameters of the robot.
| Parameter | Symbol | Value | Units |
|---|
| Mass | | 28 | kg |
| Torso inertia | | 0.11 | kg·m2 |
| 0.28 | kg·m2 |
| 0.37 | kg·m2 |
| Torso length | | 0.69 | m |
| Torso width | | 0.58 | m |
| Torso height | | 0.75 | m |
| Leg link length | | 0.3 | m |
| Foot diameter | | 0.04 | m |
Table 3.
Actuator parameters.
Table 3.
Actuator parameters.
| Parameter | Value | Units |
|---|
| Joint actuator mass | 0.85 | kg |
| Max joint torque | 120 | N·m |
| Max joint velocity | 6 | Rad/s |
| Wheel actuator mass | 0.37 | kg |
| Max wheel torque | 3 | N·m |
| Max wheel velocity | 50 | Rad/s |
Table 4.
Study materials.
Table 4.
Study materials.
| Material | Young’s Modulus | Poisson’s Ratio | Yield Strength |
|---|
| Steel AISI 1045 | 207 GPa | 0.33 | 1274 MPa |
| Aluminum 6061 | 68.9 GPa | 0.33 | 275 MPa |
| Nylon 6/6 | 2.93 GPa | 0.35 | 82.75 MPa |
| Rubber | 0.003 GPa | 0.49 | 21 MPa |
Table 5.
Key gait parameters.
Table 5.
Key gait parameters.
| Parameter | Symbol |
|---|
| Stride length | |
| Step height | |
| Rise | |
| Balance compensation | |
| Step time | |
Table 6.
Contact properties.
Table 6.
Contact properties.
| Material 1 | Material 2 | Coulomb Friction | Bounce |
|---|
| Default | Default | 0.3 | 0.25 |
| Rubber | Default | 0.6 | 0.5 |

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}