
Eigendegradation Algorithm Applied to Visco-Plastic Weak Layers



Abstract
:1. Introduction
2. Constitutive Model
2.1. Rate Dependent Plasticity
2.2. Eigenerosion and Eigensoftening Algorithms
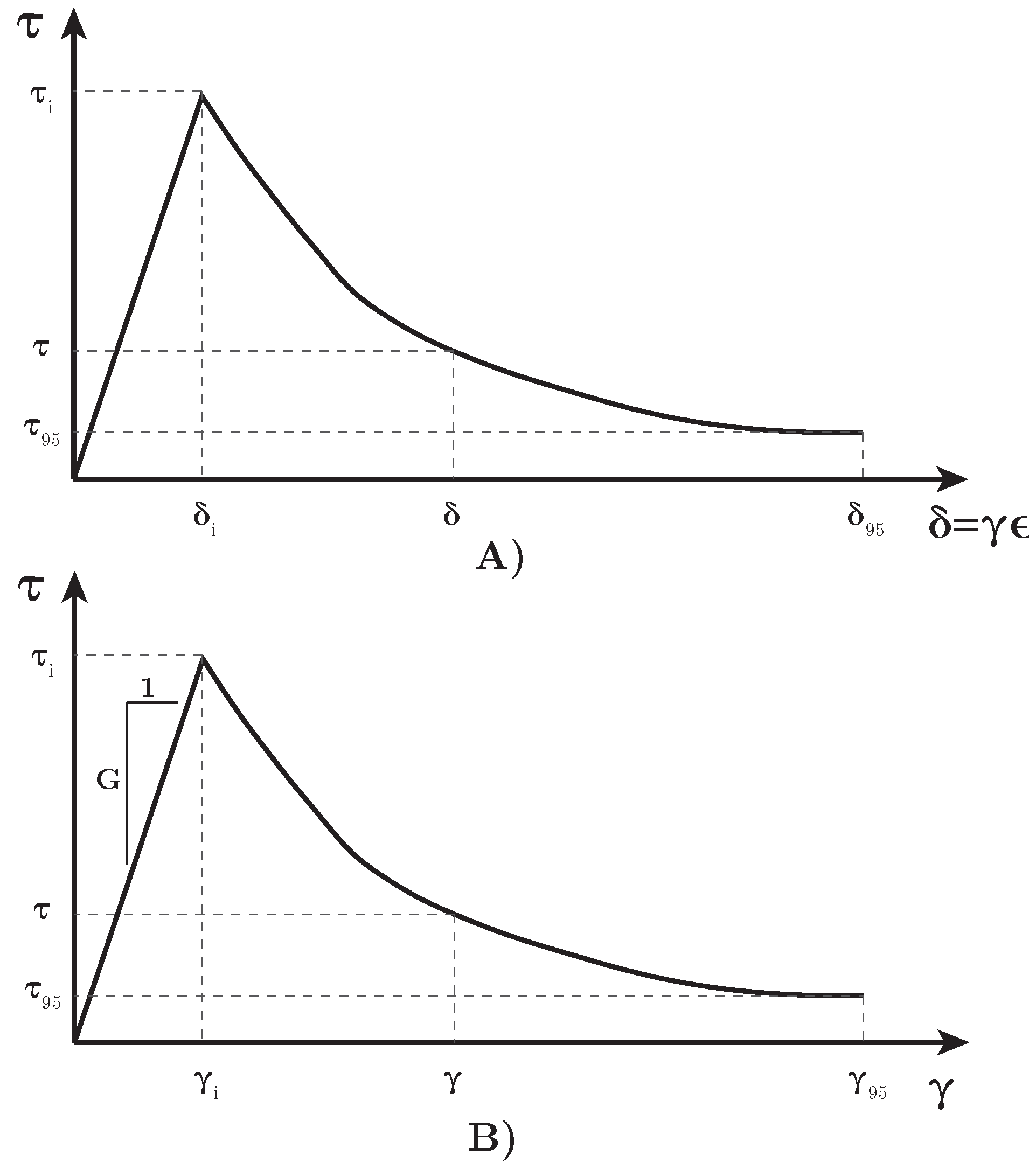
2.3. Eigendegradation Model
2.4. Visco-Plastic Eigendegradation Algorithm
| Algorithm 1 Visco-Plastic Eigendegradation algorithm. |
1. Calculation of the small strain tensor 2. Elastic predictor: volumetric and deviatoric stress measurements 3. Eigendegradation calculation: if then else
end if 4. Yield condition: if Elastic region: else Visco-plastic flow:
end if 5. Update elastic left Cauchy–Green Tensor |
3. Time and Spatial Discretization
3.1. Spatial Discretization
3.2. Time Discretization
4. Applications
4.1. Shear Test
4.2. Strip Footing Load
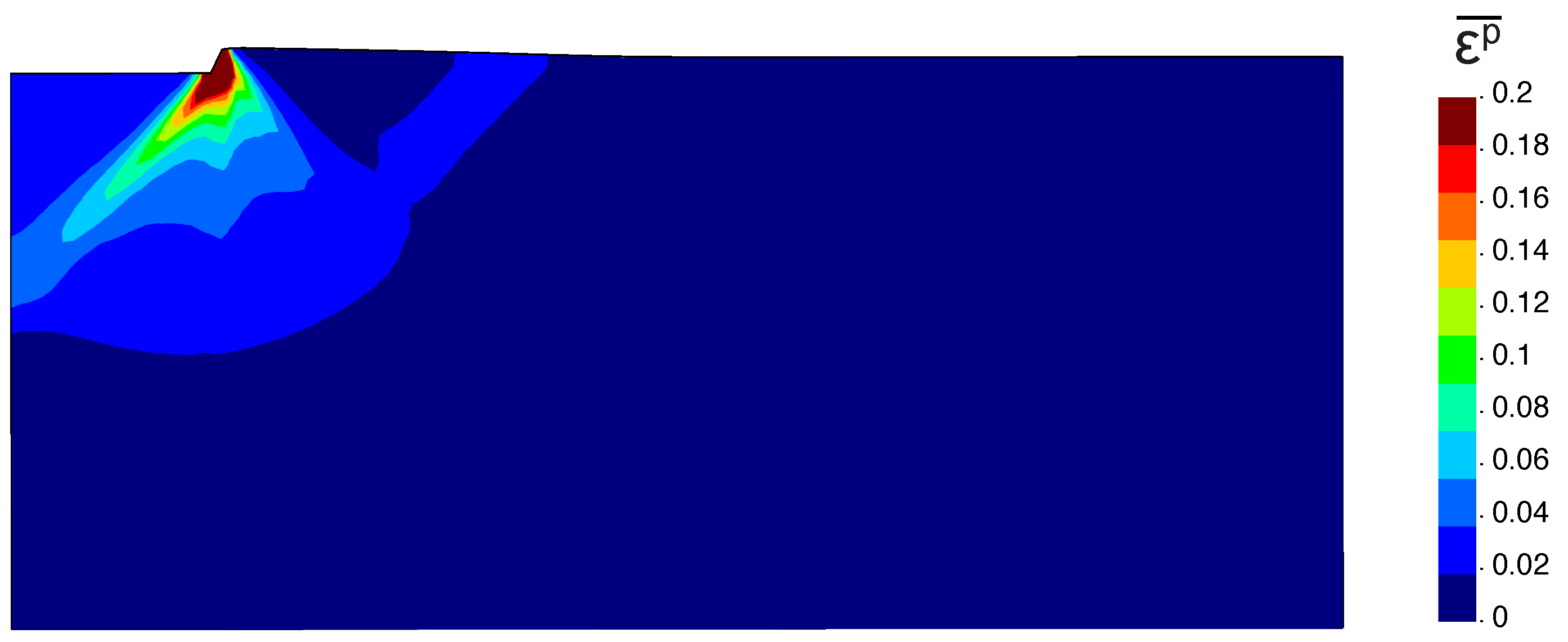
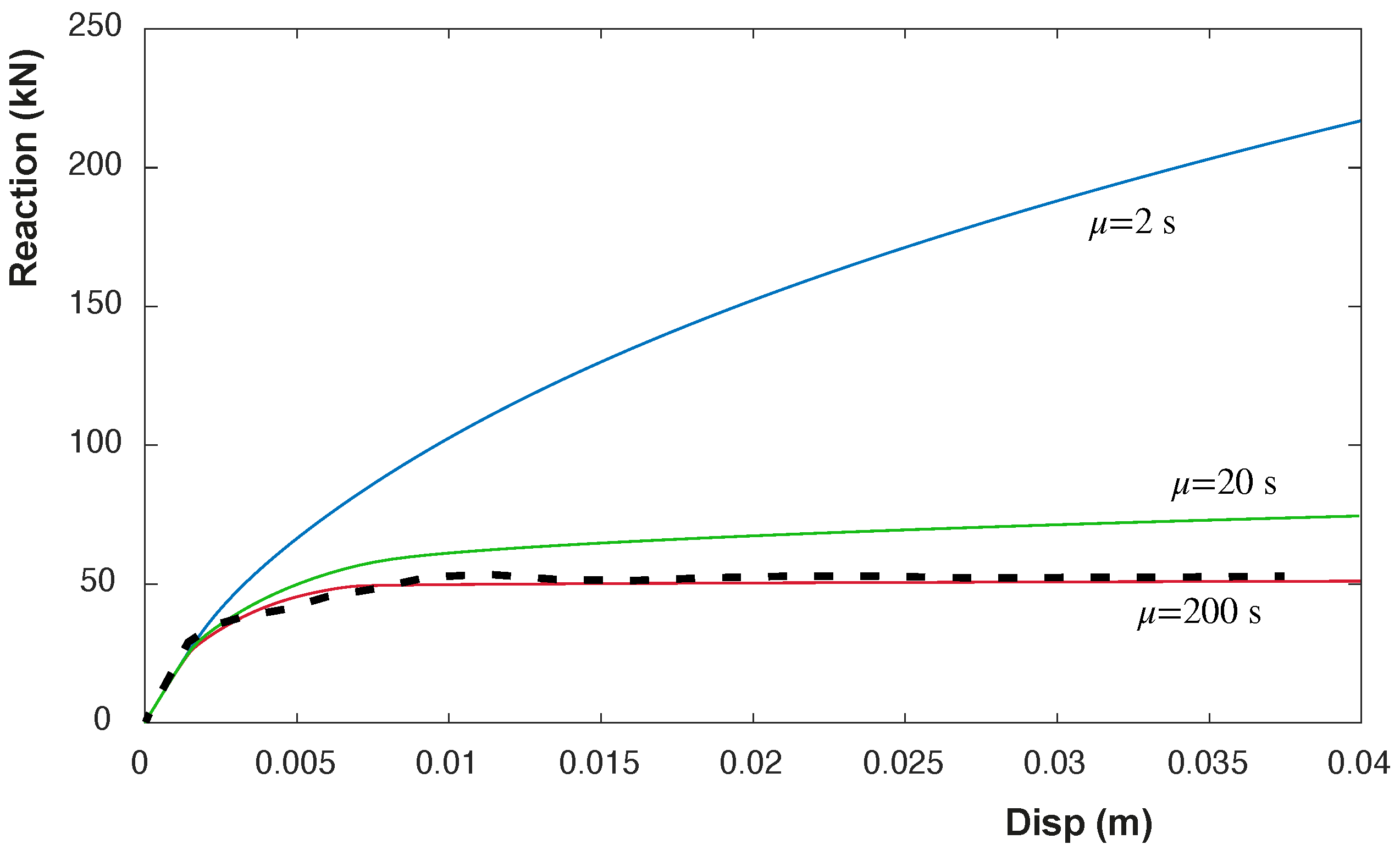
4.3. Vertical Cut
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FEM | Finite Element Method |
| OTM | Optimal Transportation Meshfree |
| SPH | Smooth Particle Hydrodynamics |
| MPM | Material Point Method |
| ALE | Arbitrary Eulerian–Lagrangian |
References
- Drucker, D.C.; Prager, W. Soil mechanics and plastic analysis for limit design. Q. Appl. Math. 1952, 10, 157–165. [Google Scholar] [CrossRef]
- Darve, F.; Laouafa, F. Instabilities in granular materials and application to landslides. Mech. Cohesive-Frict. Mater. 2000, 5, 627–652. [Google Scholar] [CrossRef]
- Pastor, M.; Manzanal, D.; Merodo, J.A.F.; Mira, P.; Blanc, T.; Drempetic, V.; Pastor, M.J.; Haddad, B.; Sánchez, M. From solids to fluidized soils: Diffuse failure mechanisms in geostructures with applications to fast catastrophic landslides. Granul. Matter 2009, 12, 211–228. [Google Scholar] [CrossRef]
- Ledesma, O.; Manzanal, D.; Sfriso, A. Formulation and numerical implementation of a state parameter-based generalized plasticity model for mine tailings. Comput. Geotech. 2021, 135, 104158. [Google Scholar] [CrossRef]
- Ledesma, O.; Sfriso, A.; Manzanal, D. Procedure for assessing the liquefaction vulnerability of tailings dams. Comput. Geotech. 2022, 144, 104632. [Google Scholar] [CrossRef]
- Laouafa, F.; Darve, F. Modelling of slope failure by a material instability mechanism. Comput. Geotech. 2002, 29, 301–325. [Google Scholar] [CrossRef]
- Fernández Merodo, J.A.; Pastor, M.; Mira, P.; Tonni, L.; Herreros, M.I.; Gonzalez, E.; Tamagnini, R.; Merodo, J.A.F.; Pastor, M.; Mira, P.; et al. Modelling of diffuse failure mechanisms of catastrophic landslides. Comput. Methods Appl. Mech. Eng. 2004, 193, 2911–2939. [Google Scholar] [CrossRef]
- López-Querol, S.; Blázquez, R. Liquefaction and cyclic mobility model in saturated granular media. Int. J. Numer. Anal. Methods Geomech. 2006, 30, 413–439. [Google Scholar] [CrossRef]
- Manzanal, D.; Bertelli, S.; Lopez-Querol, S.; Rossetto, T.; Mira, P. Influence of fines content on liquefaction from a critical state framework: The Christchurch earthquake case study. Bull. Eng. Geol. Environ. 2021, 80, 4871–4889. [Google Scholar] [CrossRef]
- Manzanal, D.; Drempetic, V.; Haddad, B.; Pastor, M.; Stickle, M.M.; Mira, P. Application of a New Rheological Model to Rock Avalanches: An SPH Approach. Rock Mech. Rock Eng. 2016, 49, 2353–2372. [Google Scholar] [CrossRef]
- Dutto, P.; Stickle, M.; Pastor, M.; Manzanal, D.; Yague, A.; Tayyebi, S.M.; Lin, C.; Elizalde, M. Modelling of Fluidised Geomaterials: The Case of the Aberfan and the Gypsum Tailings Impoundment Flowslides. Materials 2017, 10, 562. [Google Scholar] [CrossRef] [PubMed]
- Longo, A.; Pastor, M.; Sanavia, L.; Manzanal, D.; Stickle, M.M.; Lin, C.; Yague, A.; Tayyebi, S.M. A depth average SPH model including μ(I) rheology and crushing for rock avalanches. Int. J. Numer. Anal. Methods Geomech. 2019, 43, 833–857. [Google Scholar] [CrossRef]
- Lin, C.; Pastor, M.; Yague, A.; Tayyebi, S.M.; Stickle, M.M.; Manzanal, D.; Li, T.; Liu, X. A depth-integrated SPH model for debris floods: Application to Lo Wai (Hong Kong) debris flood of August 2005. Géotechnique 2019, 69, 1035–1055. [Google Scholar] [CrossRef]
- Zhang, W.; Ji, J.; Gao, Y.; Li, X.; Zhang, C. Spatial variability effect of internal friction angle on the post-failure behavior of landslides using a random and non-Newtonian fluid based SPH method. Geosci. Front. 2020, 11, 1107–1121. [Google Scholar] [CrossRef]
- Pastor, M.; Yague, A.; Stickle, M.; Manzanal, D.; Mira, P. A two-phase SPH model for debris flow propagation. Int. J. Numer. Anal. Methods Geomech. 2017, 42, 418–448. [Google Scholar] [CrossRef]
- Pastor, M.; Tayyebi, S.M.; Stickle, M.M.; Yague, A.; Molinos, M.; Navas, P.; Manzanal, D. A depth integrated, coupled, two-phase model for debris flow propagation. Acta Geotech. 2021, 16, 2409–2433. [Google Scholar] [CrossRef]
- Zabala, F.; Alonso, E.E. Progressive failure of Aznalcóllar dam using the material point method. Géotechnique 2011, 61, 795–808. [Google Scholar] [CrossRef]
- Yerro, A.; Alonso, E.E.; Pinyol, N.M. The material point method for unsaturated soils. Geotechnique 2015, 65, 201–217. [Google Scholar] [CrossRef]
- Yerro, A.; Alonso, E.E.; Pinyol, N.M. Run-out of landslides in brittle soils. Comput. Geotech. 2016, 80, 427–439. [Google Scholar] [CrossRef]
- Cuomo, S.; Di Perna, A.; Martinelli, M. Modelling the spatio-temporal evolution of a rainfall-induced retrogressive landslide in an unsaturated slope. Eng. Geol. 2021, 294, 106371. [Google Scholar] [CrossRef]
- Feng, K.; Wang, G.; Huang, D.; Jin, F. Material point method for large-deformation modeling of coseismic landslide and liquefaction-induced dam failure. Soil Dyn. Earthq. Eng. 2021, 150, 106907. [Google Scholar] [CrossRef]
- Sizkow, S.F.; El Shamy, U. SPH-DEM simulations of saturated granular soils liquefaction incorporating particles of irregular shape. Comput. Geotech. 2021, 134, 104060. [Google Scholar] [CrossRef]
- Rice, J.R. The Initiation and growth of shear band. In Plasticity and Soil Mechanics; Palmer, A.C., Ed.; Cambridge University Engineering Department: Cambridge, UK, 1973; pp. 263–274. [Google Scholar]
- Desrues, J. La Localisation de la Déformation dans les Milieux Granulaires. Ph.D. Thesis, Université Joseph Fourier, Grenoble, France, 1984. [Google Scholar]
- Sulem, J.; Vardoulakis, I. Bifurcation Analysis in Geomechanics; CRC Press: Boca Raton, FL, USA, 1995. [Google Scholar] [CrossRef]
- Wang, W.; Sluys, L.; De Borst, R. Viscoplasticity for instabilities due to strain softening and strain-rate softening. Int. J. Numer. Methods Eng. 1997, 40, 3839–3864. [Google Scholar] [CrossRef]
- Gutiérrez, M.A.; De Borst, R. Numerical analysis of localization using a viscoplastic regularization: Influence of stochastic material defects. Int. J. Numer. Methods Eng. 1999, 44, 1823–1841. [Google Scholar] [CrossRef]
- Bjerrum, L. Engineering Geology of Norwegian Normally-Consolidated Marine Clays as Related to Settlements of Buildings. Géotechnique 1967, 17, 83–118. [Google Scholar] [CrossRef]
- Kim, Y.T.; Leroueil, S. Modeling the viscoplastic behaviour of clays during consolidation: Application to Berthierville clay in both laboratory and field conditions. Can. Geotech. J. 2001, 38, 484–497. [Google Scholar] [CrossRef]
- Feda, J. Creep of Soils and Related Phenomena; Developments in Geotechnical Engineering; Elsevier: Amsterdam, The Netherlands, 1992; pp. 3–422. [Google Scholar]
- Javanmardi, Y.; Imam, S.M.R.; Pastor, M.; Manzanal, D. A Reference State Curve to Define the State of Soils over a Wide Range of Pressures and Densities. Geotechnique 2018, 68, 95–106. [Google Scholar] [CrossRef]
- Adachi, T.; Okano, M. A Constitutive Equation for Normally Consolidated Clay. Soils Found. 1974, 14, 69–73. [Google Scholar] [CrossRef]
- Heeres, O.M.; Suiker, A.S.; de Borst, R. A comparison between the Perzyna viscoplastic model and the Consistency viscoplastic model. Eur. J. Mech. A/Solids 2002, 21, 1–12. [Google Scholar] [CrossRef]
- Perzyna, P. Fundamental Problems in Viscoplasticity. Adv. Appl. Mech. 1966, 9, 243–377. [Google Scholar]
- Naghdi, P.M.; Murch, S.A. On the Mechanical Behavior of Viscoelastic/Plastic Solids. J. Appl. Mech. 1963, 30, 321–328. [Google Scholar] [CrossRef]
- Nova, R. A viscoplastic constitutive model for normally consolidated clays. In International Union of Theoretical and Applied Mechanics Conference on Deformation and Failure of Granular Materials; CRC Press: Delft, The Netherlands, 1982; pp. 287–295. ISBN 9789061912248. [Google Scholar]
- Blanc, T.; Pastor, M. A stablized {Runge-Kutta, Taylor} smoothed particle hydrodynamics algorithm for large deformation problems in dynamics. Int. J. Numer. Methods Eng. 2012, 91, 1427–1458. [Google Scholar] [CrossRef]
- Navas, P.; Yu, R.C.; Li, B.; Ruiz, G. Modeling the dynamic fracture in concrete: An eigensoftening meshfree approach. Int. J. Impact Eng. 2018, 113, 9–20. [Google Scholar] [CrossRef]
- Molinos, M.; Navas, P.; Manzanal, D.; Pastor, M. Local Maximum Entropy Material Point Method applied to quasi-brittle fracture. Eng. Fract. Mech. 2021, 241, 107394. [Google Scholar] [CrossRef]
- Li, B.; Habbal, F.; Ortiz, M. Optimal transportation meshfree approximation schemes for fluid and plastic flows. Int. J. Numer. Methods Eng. 2010, 83, 1541–1579. [Google Scholar] [CrossRef]
- Li, B.; Stalzer, M.; Ortiz, M. A massively parallel implementation of the Optimal Transportation Meshfree (pOTM) method for explicit solid dynamics. Int. J. Numer. Methods Eng. 2014, 100, 40–61. [Google Scholar] [CrossRef]
- Huang, D.; Weißenfels, C.; Wriggers, P. Modelling of serrated chip formation processes using the stabilized optimal transportation meshfree method. Int. J. Mech. Sci. 2019, 155, 323–333. [Google Scholar] [CrossRef]
- Navas, P.; Manzanal, D.; Martín Stickle, M.; Pastor, M.; Molinos, M. Meshfree modeling of cyclic behavior of sands within large strain Generalized Plasticity Framework. Comput. Geotech. 2020, 122, 103538. [Google Scholar] [CrossRef]
- Navas, P.; Pastor, M.; Yagüe, A.; Stickle, M.M.; Manzanal, D.; Molinos, M. Fluid stabilization of the u-w Biot’s formulation at large strain. Int. J. Numer. Anal. Methods Geomech. 2021, 45, 336–352. [Google Scholar] [CrossRef]
- de Souza Neto, E.A.; Pires, F.M.; Owen, D.R.J.; Andrade Pires, F.M. F-bar-based linear triangles and tetrahedra for finte strain analysis of nearly incompressible solids. {Part I:} formulation and benchmarking. Int. J. Numer. Methods Eng. 2005, 62, 353–383. [Google Scholar] [CrossRef]
- Owen, D.R.J.; Hinton, E. Finite Elements in Plasticity—Theory and Practice; Pineridge Press: Swansea, WA, USA, 1981; p. 603. [Google Scholar] [CrossRef]
- Schmidt, B.; Fraternali, F.; Ortiz, M. Eigenfracture: An eigendeformation approach to variational fracture. SIAM J. Multiscale Model. Simul. 2009, 7, 1237–1266. [Google Scholar] [CrossRef]
- Pandolfi, A.; Ortiz, M. An eigenerosion approach to brittle fracture. Int. J. Numer. Methods Eng. 2012, 92, 694–714. [Google Scholar] [CrossRef]
- Li, B.; Kadane, A.; Ravichandran, G.; Ortiz, M.; Kidane, A. Verification and validation of the optimal-transportation meshfree (OTM) simulation of terminal ballistics. Int. J. Impact Eng. 2012, 42, 25–36. [Google Scholar] [CrossRef]
- Pandolfi, A.; Li, B.; Ortiz, M. Modeling fracture by material-point erosion. Int. J. Fract. 2013, 184, 3–16. [Google Scholar] [CrossRef]
- Yu, R.C.; Navas, P.; Ruiz, G. Meshfree modeling of the dynamic mixed-mode fracture in FRC through an eigensoftening approach. Eng. Struct. 2018, 172, 94–104. [Google Scholar] [CrossRef]
- Bažant, Z.P.; Oh, B.H. Crack band theory for fracture in concrete. Mater. Struct. 1983, 16, 155–177. [Google Scholar] [CrossRef]
- Bažant, Z.P.; Planas, J. Fracture and Size Effect in Concrete and Other Quasibrittle Materials; New Directions in Civil Engineering; CRC Press: Boca Raton, FL, USA, 2019; pp. 1–170. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, D.; Randolph, M.; Puzrin, A.M. Catastrophic failure in planar landslides with a fully softened weak zone. Géotechnique 2015, 65, 755–769. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, X.; Tinti, S. Large deformation dynamic analysis of progressive failure in layered clayey slopes under seismic loading using the particle finite element method. Acta Geotech. 2021, 16, 2435–2448. [Google Scholar] [CrossRef]
- Singh, V.; Stanier, S.; Bienen, B.; Randolph, M.F. Modelling the behaviour of sensitive clays experiencing large deformations using non-local regularisation techniques. Comput. Geotech. 2021, 133, 104025. [Google Scholar] [CrossRef]
- Arroyo, M.; Ortiz, M. Local maximum-entropy approximation schemes: A seamless bridge between finite elements and meshfree methods. Int. J. Numer. Methods Eng. 2006, 65, 2167–2202. [Google Scholar] [CrossRef]
- Kontoe, S. Developement of Time Integration Schemes and Advanced Boundary Conditions for Dynamic Geotechnical Analysis. Ph.D. Thesis, University of London, London, UK, 2006. [Google Scholar]
- Wriggers, P. Nonlinear Finite Element Methods; Springer: Berlin/Heidelberg, Germany, 2008; Volume 2008. [Google Scholar]
- Navas, P.; López-Querol, S.; Yu, R.C.; Pastor, M. Optimal transportation meshfree method in geotechnical engineering problems under large deformation regime. Int. J. Numer. Methods Eng. 2018, 115, 1217–1240. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Softened/modeled length | 90 m |
| Overall height, H | 10 m |
| Height of sliding material, h | 7.2 m |
| Shear band thickness, s | 0.5 m |
| Submerged density of the soil, | 600 kg/m |
| Poisson’s ratio, | 0.495 |
| Young’s modulus, E | 1.98 MPa |
| Peak shear strength, | 10 kPa |
| Residual (95%) shear strength, | 1.25 kPa |
| Plastic shear strain to 95% reduction in strength, | 0.6 |
| Neighborhood parameter, | 1.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Navas, P.; Manzanal, D.; Yagüe, Á.; Stickle, M.M.; López-Querol, S. Eigendegradation Algorithm Applied to Visco-Plastic Weak Layers. Appl. Sci. 2022, 12, 8175. https://doi.org/10.3390/app12168175
Navas P, Manzanal D, Yagüe Á, Stickle MM, López-Querol S. Eigendegradation Algorithm Applied to Visco-Plastic Weak Layers. Applied Sciences. 2022; 12(16):8175. https://doi.org/10.3390/app12168175
Chicago/Turabian StyleNavas, Pedro, Diego Manzanal, Ángel Yagüe, Miguel M. Stickle, and Susana López-Querol. 2022. "Eigendegradation Algorithm Applied to Visco-Plastic Weak Layers" Applied Sciences 12, no. 16: 8175. https://doi.org/10.3390/app12168175