
Analysis of the Influence of a Powertrain Mounting System on a Dual-Clutch Transmission Vehicle under Typical Working Conditions



Abstract
:1. Introduction
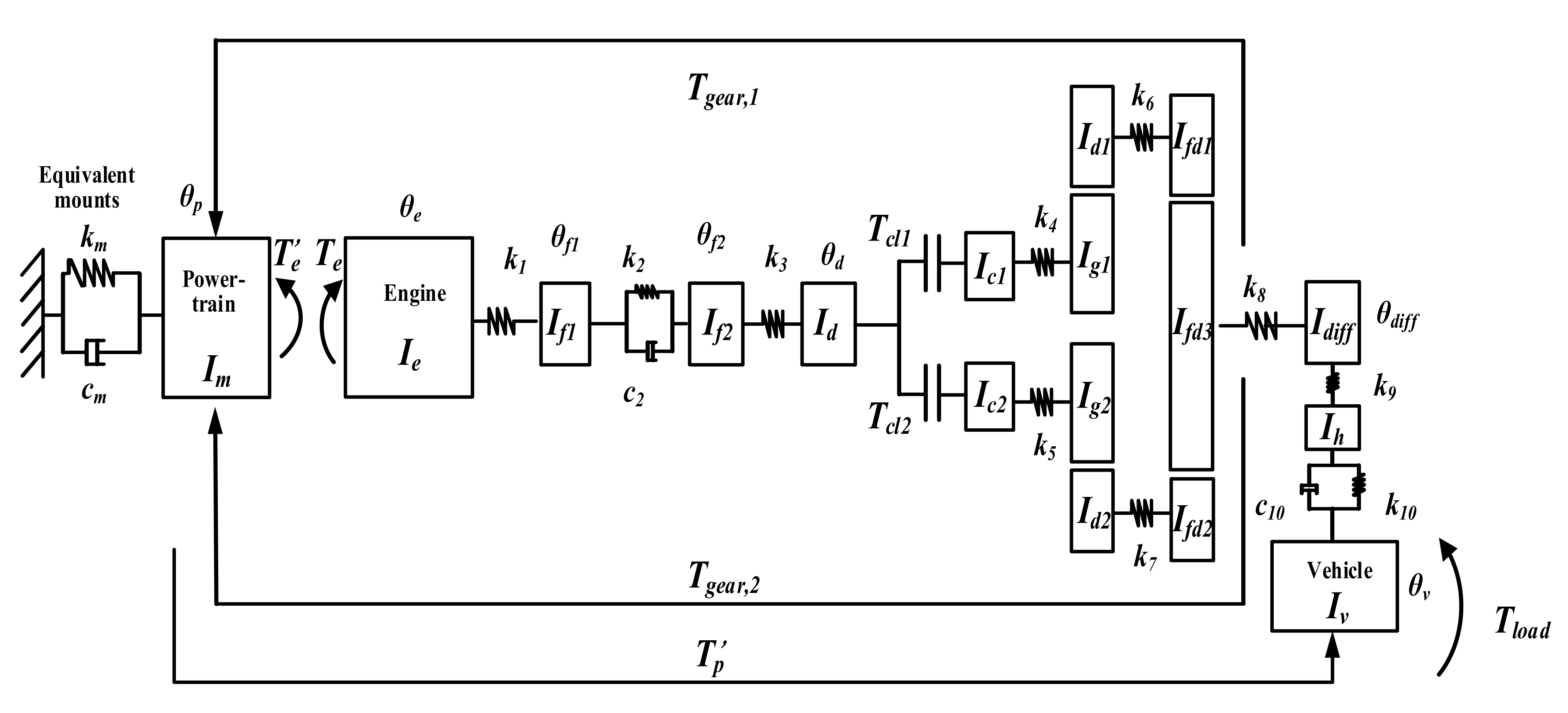
2. Dynamic Model of DCT Vehicle with Mount
2.1. Engine Torque Model
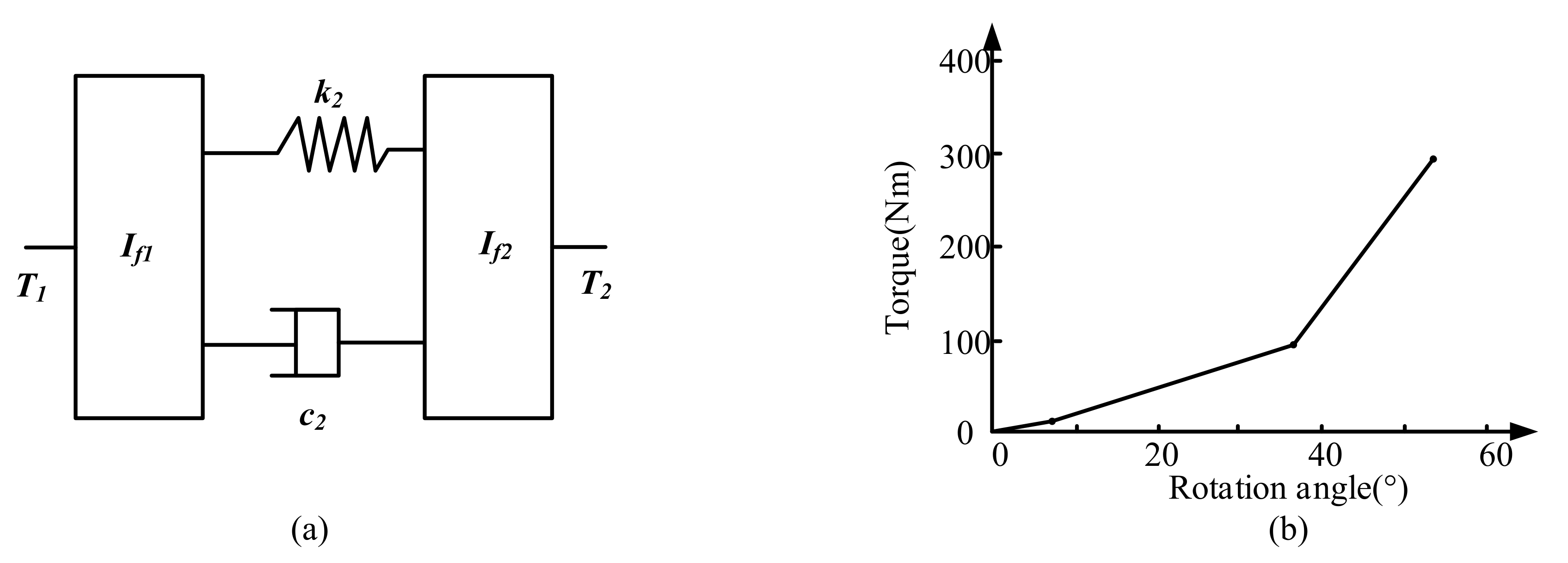
2.2. Dual Mass Flywheel Model
2.3. Clutch Model
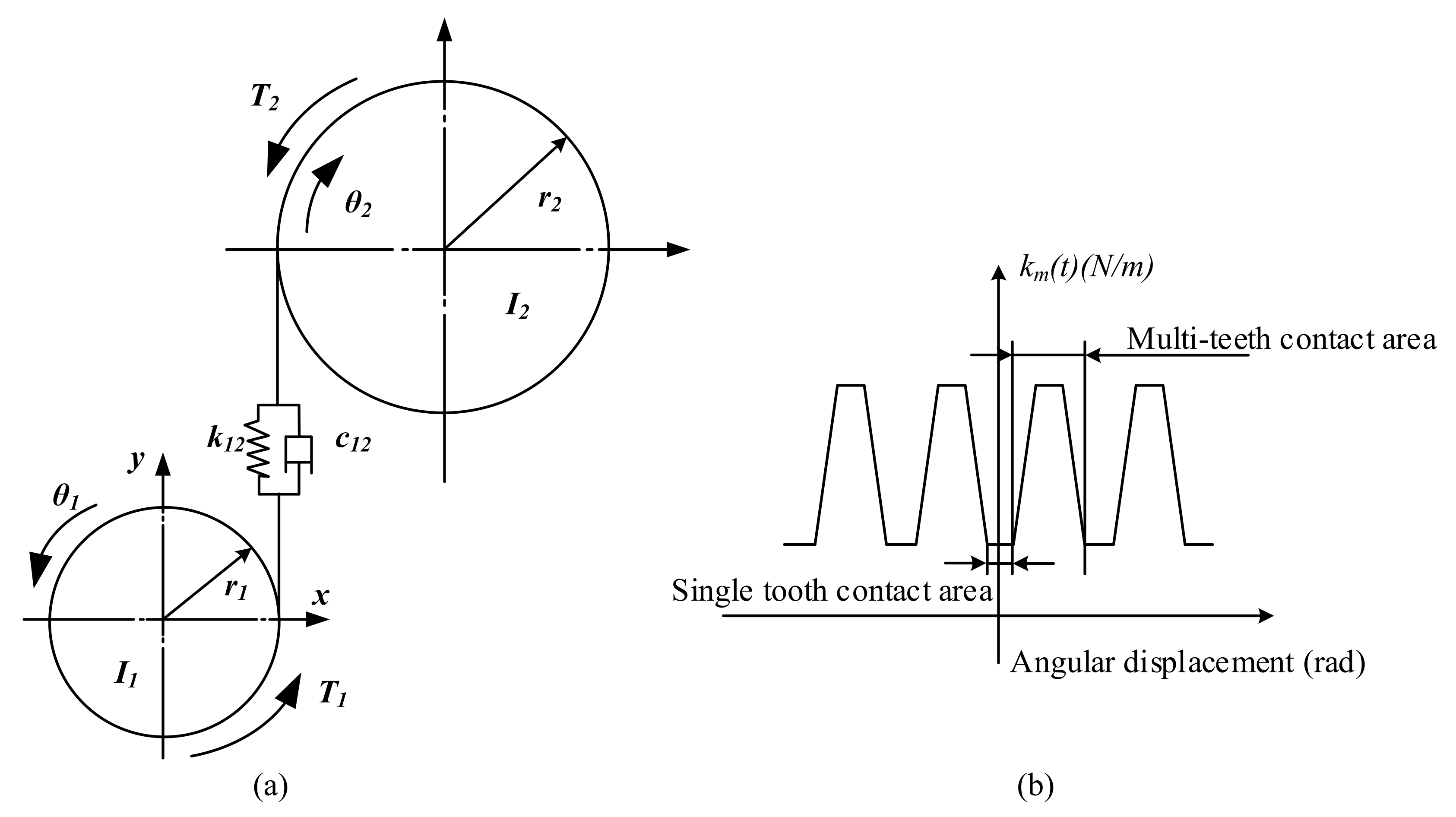
2.4. Gear System Model
2.5. Vehicle Dynamic Model with Mount
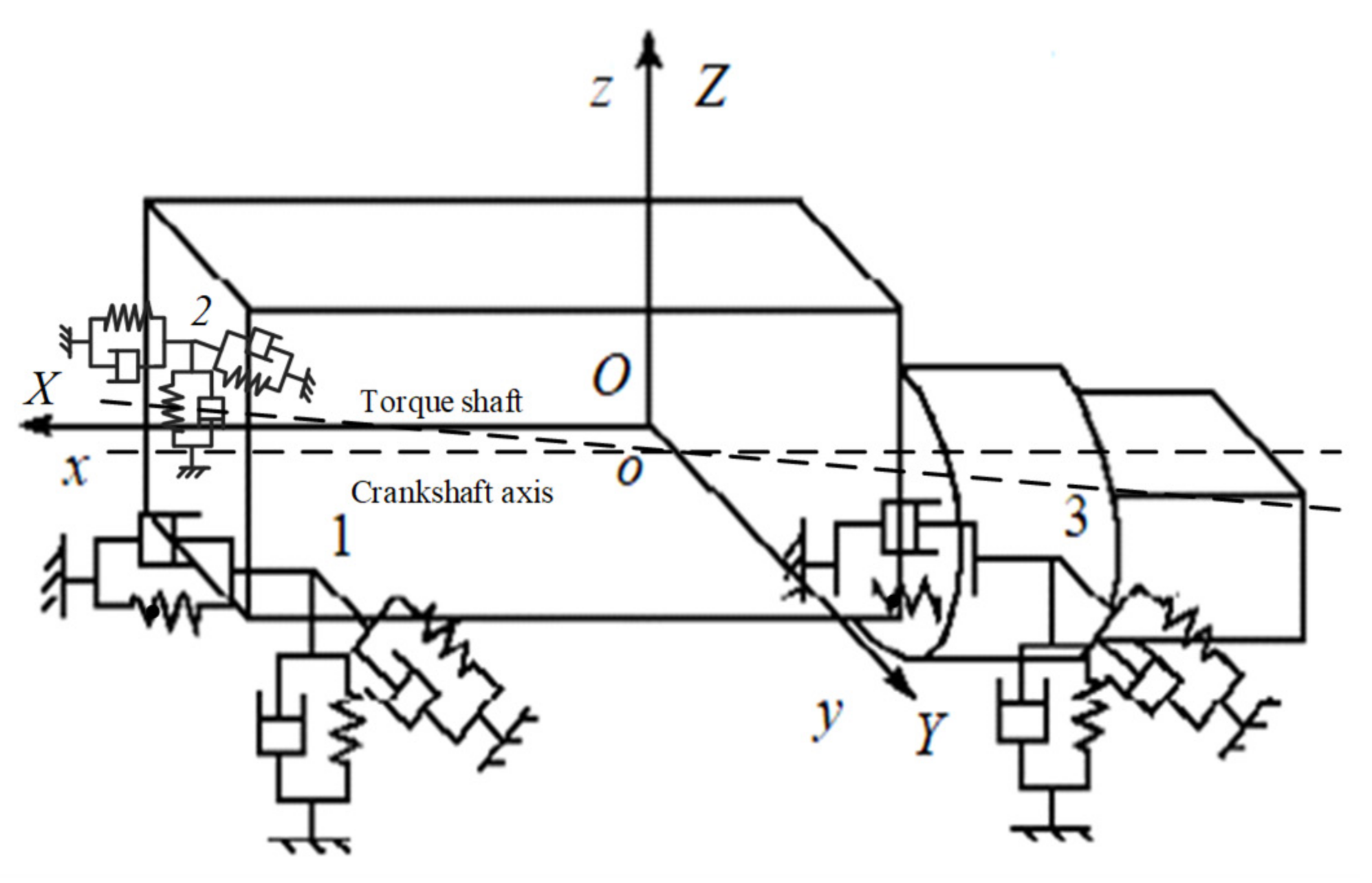
2.5.1. Powertrain Mounting System Model
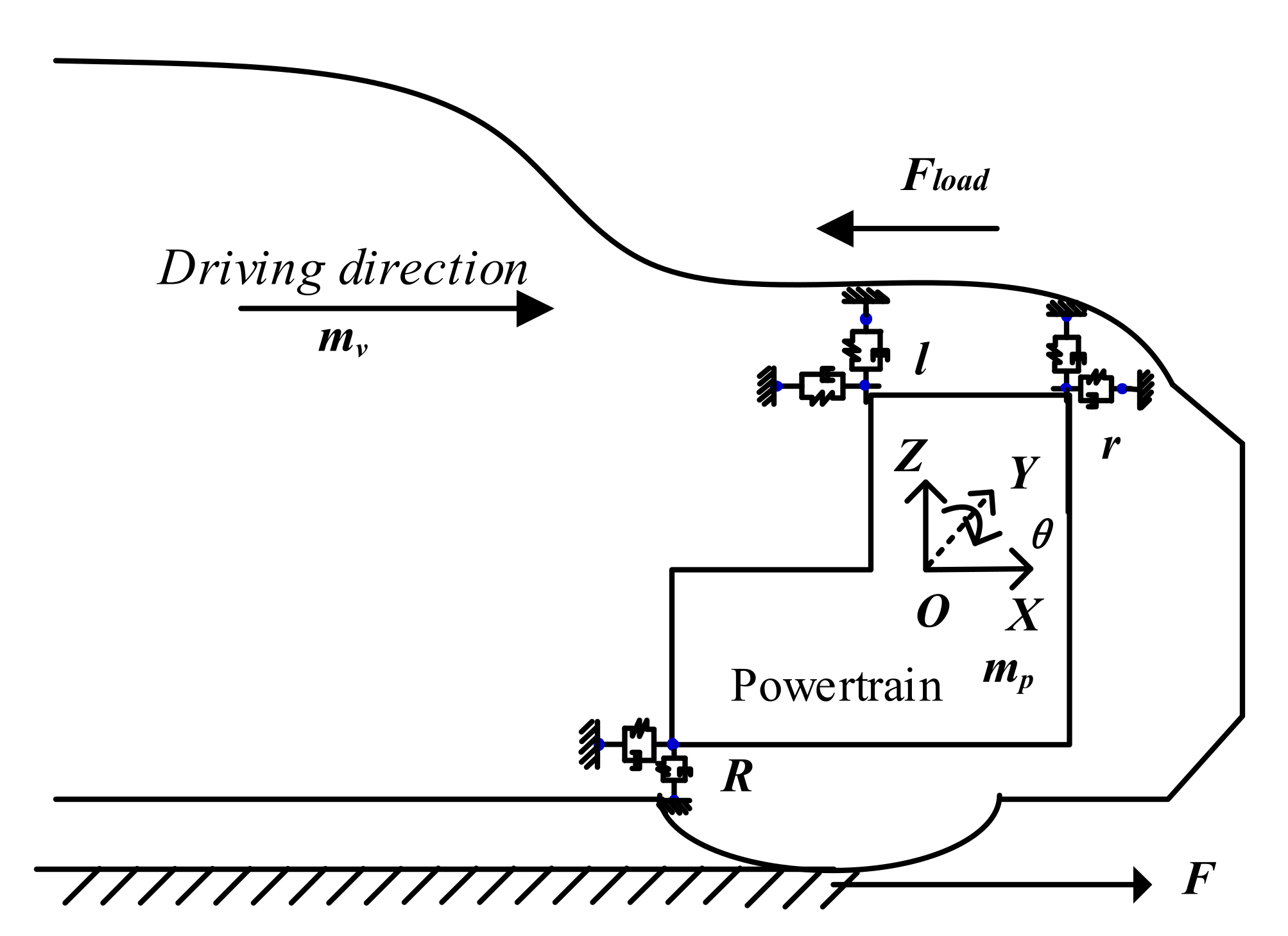
2.5.2. The Interaction between the Vehicle and the Powertrain
2.5.3. Vehicle Dynamic Model with Mount
3. Simulation Results Considering Typical Working Conditions with Mount
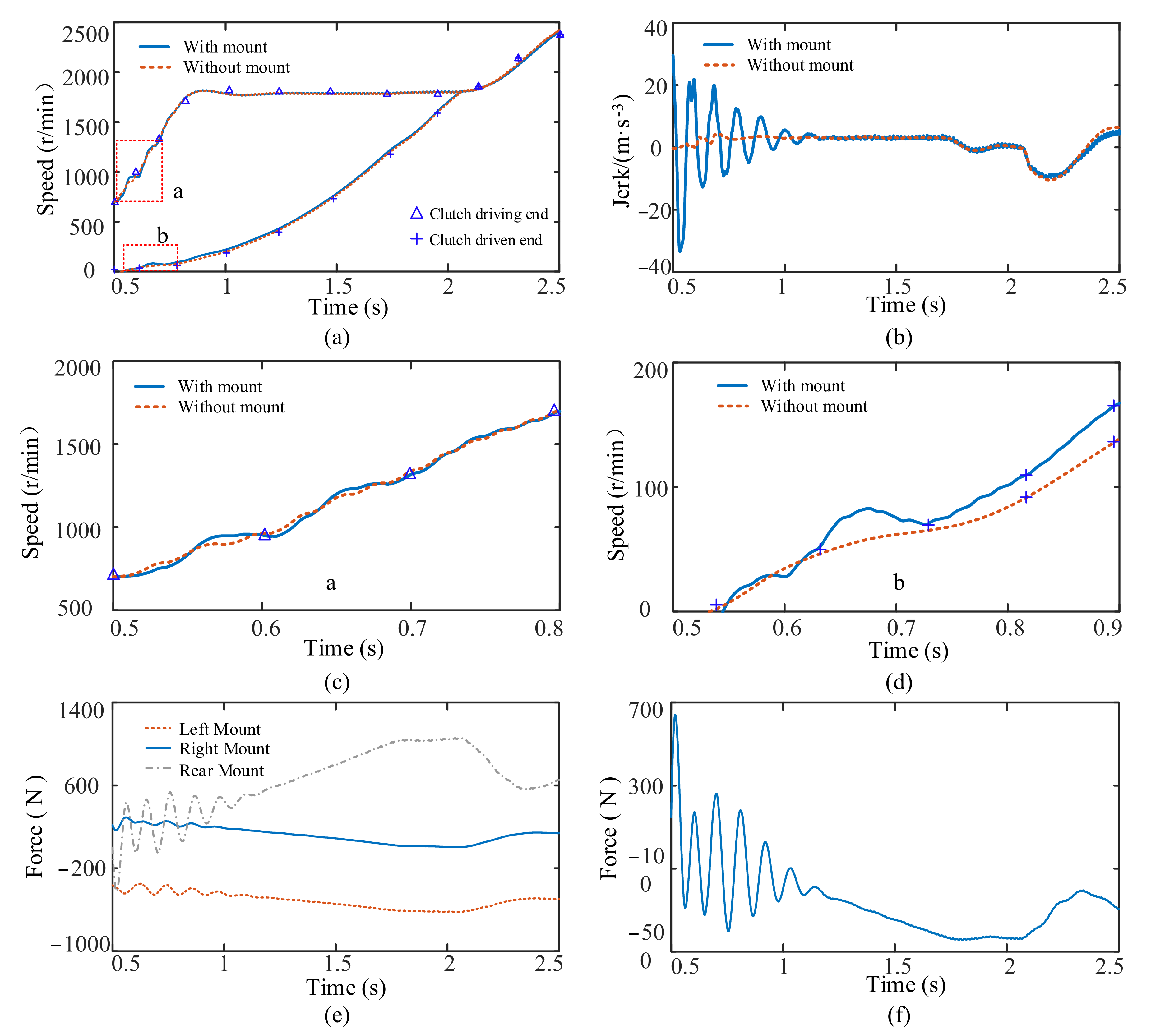
3.1. Starting Condition
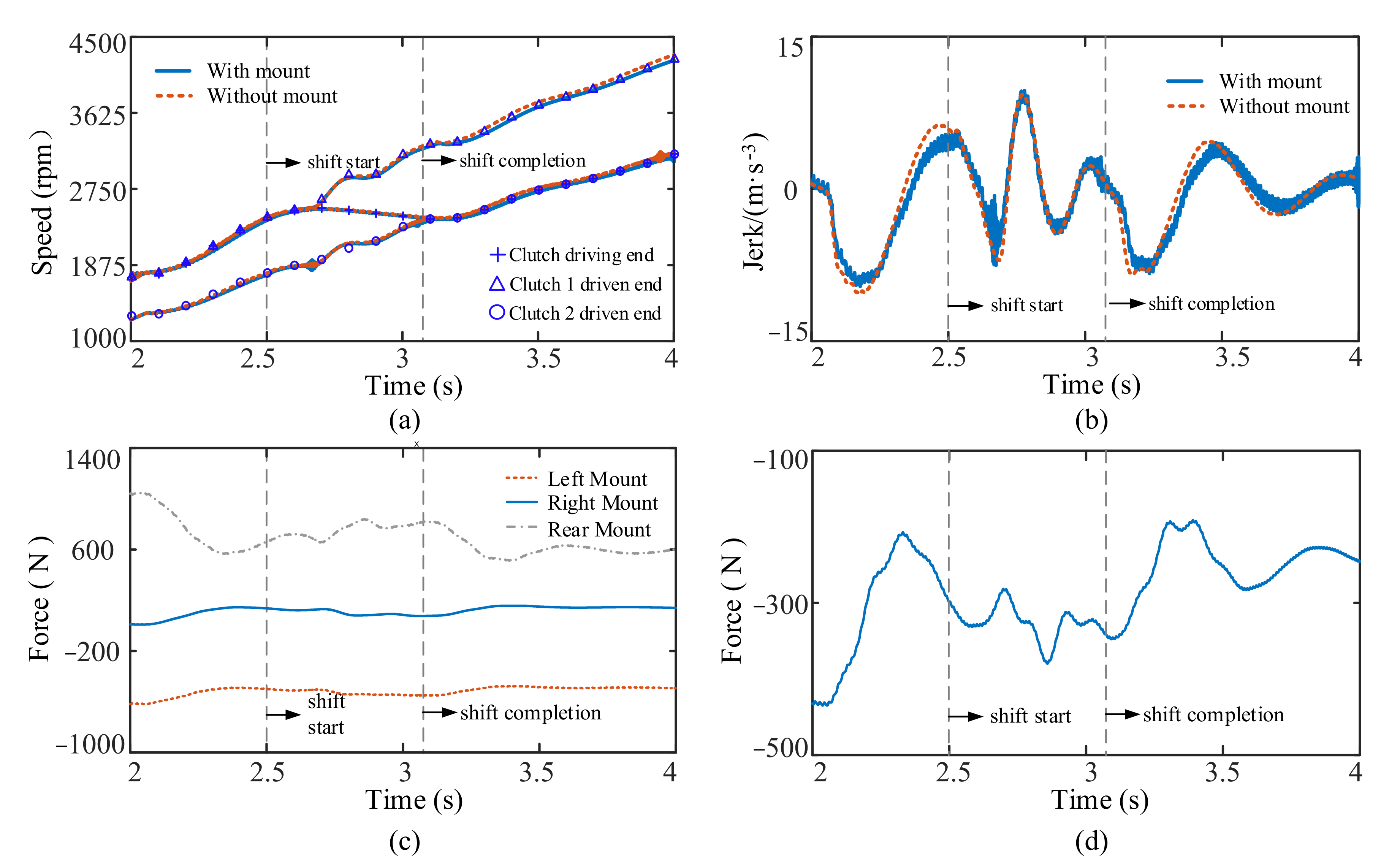
3.2. Shifting Condition
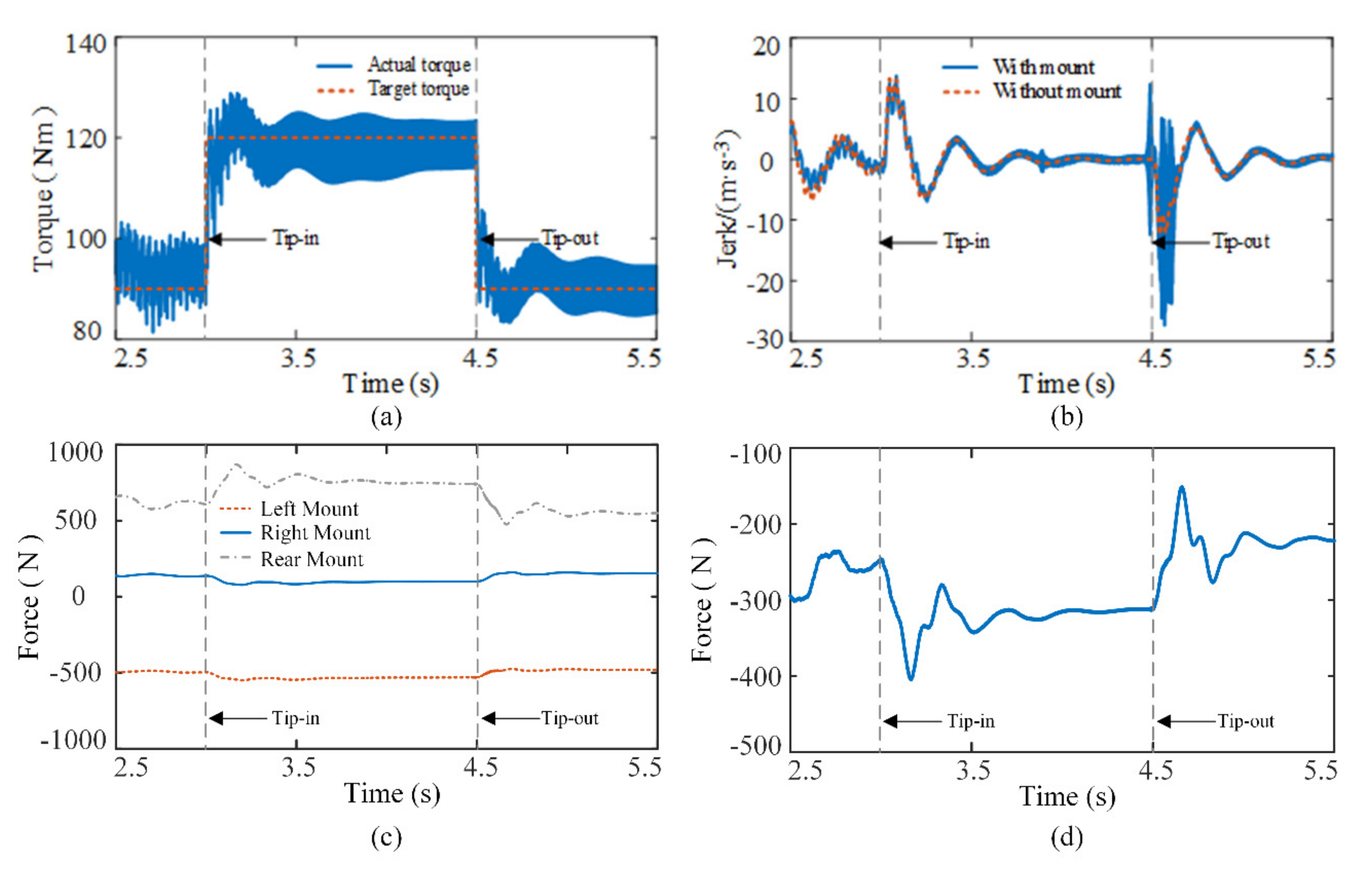
3.3. Tip-In/Tip-Out Condition
4. Influence of Mount Parameters on the Longitudinal Dynamic Performance of the Vehicle
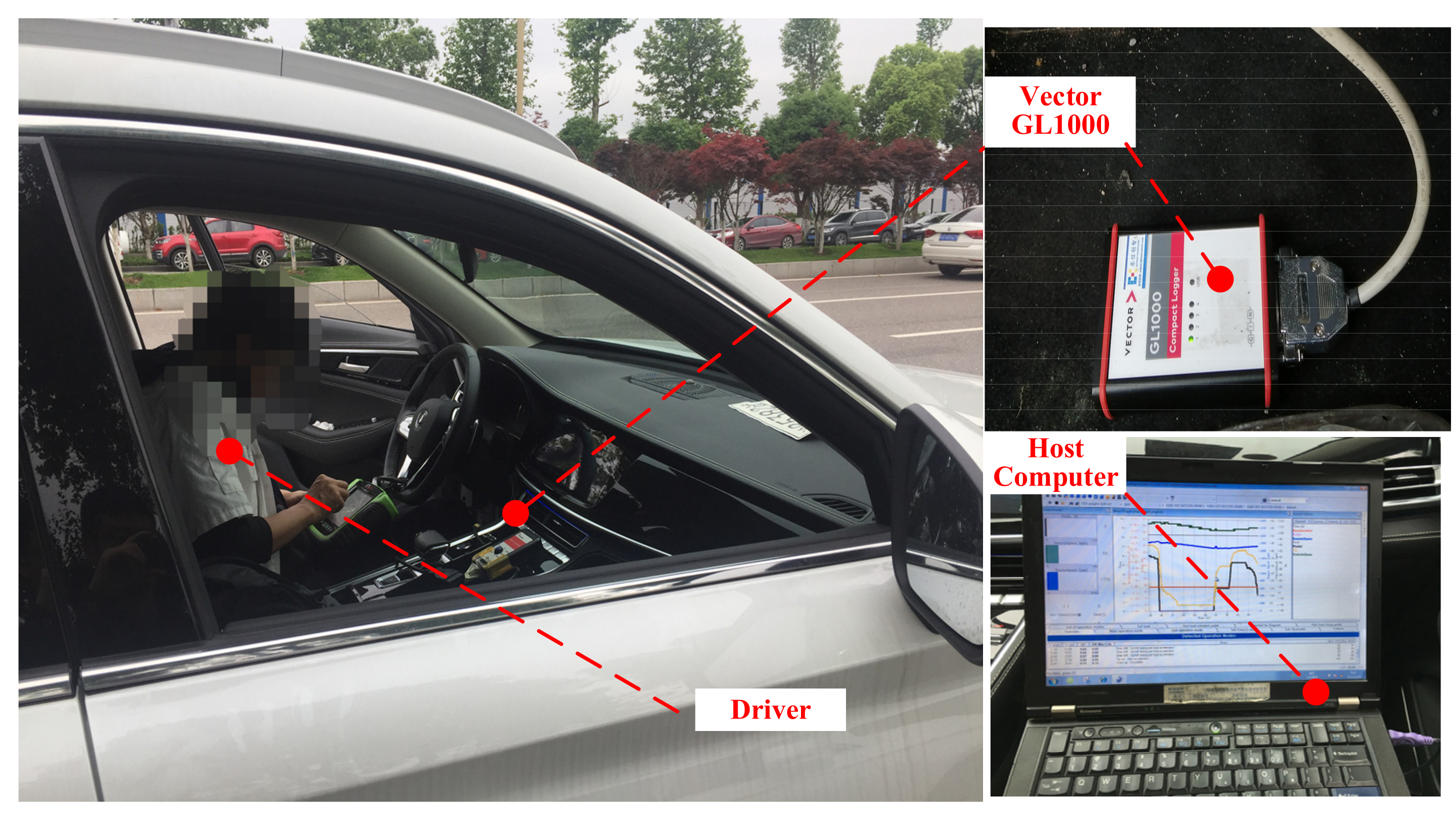
5. Test Results and Discussion
6. Conclusions
- (1)
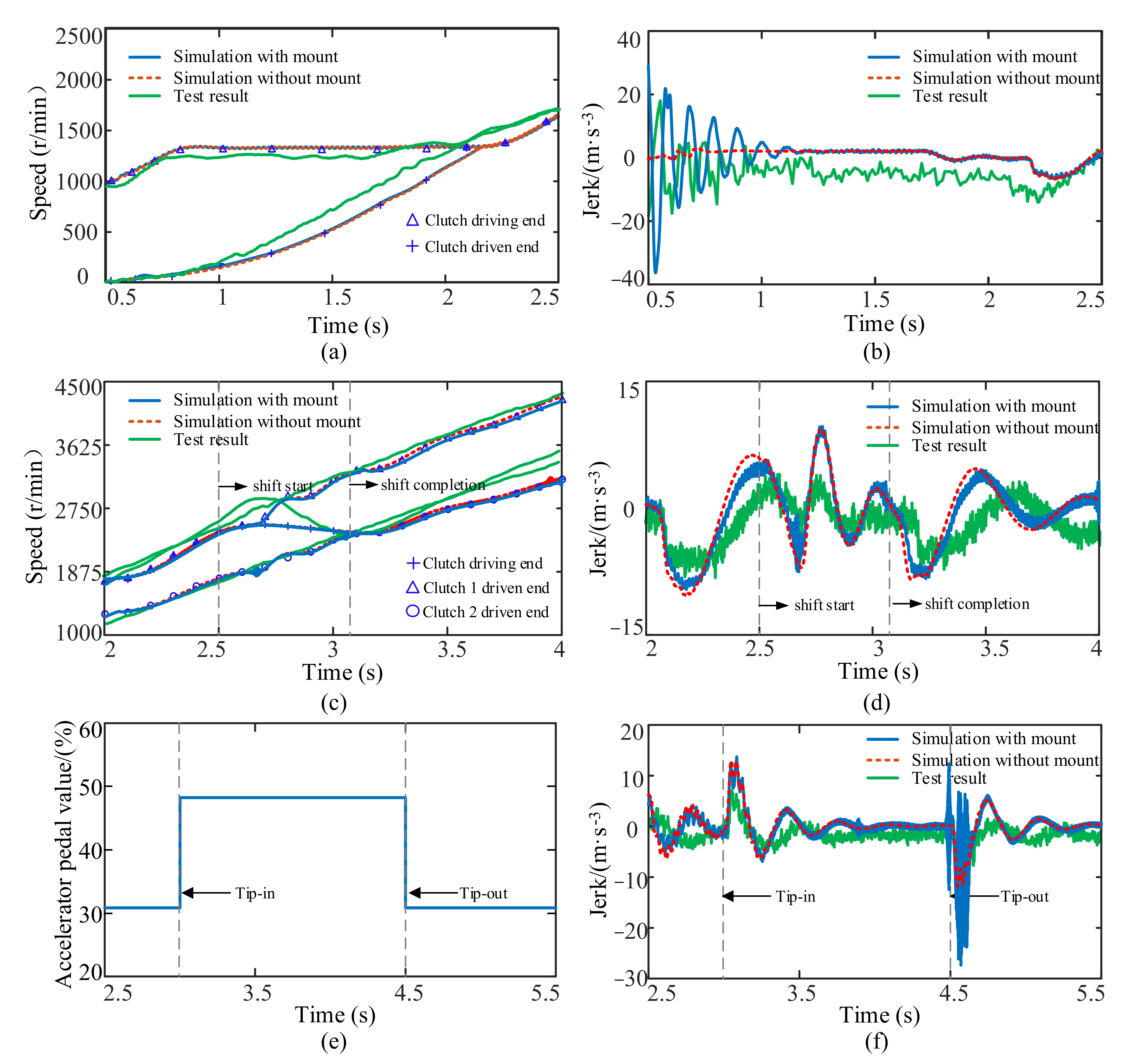
- The powertrain mount significantly impacts the longitudinal dynamic performance of DCT vehicles during starting, shifting, and tip-in/tip-out processes. The bigger the torque change in the vehicle powertrain, the bigger is the influence of the mount on the vehicle. Additionally, the higher the engine speed, the more obvious the fluctuation amplitude. Simultaneously, the engine torque fluctuation is transmitted to the vehicle through the mount, which causes the jerk to produce high-frequency, low-amplitude fluctuations. The simulation results of the two vehicle dynamics models established are compared with the test results. It is concluded that ignoring the influence of the mount when building the vehicle model leads to a large error between the simulation results and the actual situation. Additionally, the established vehicle dynamics model with a mount can reflect the influence of the mount on the longitudinal dynamics performance of the vehicle better.
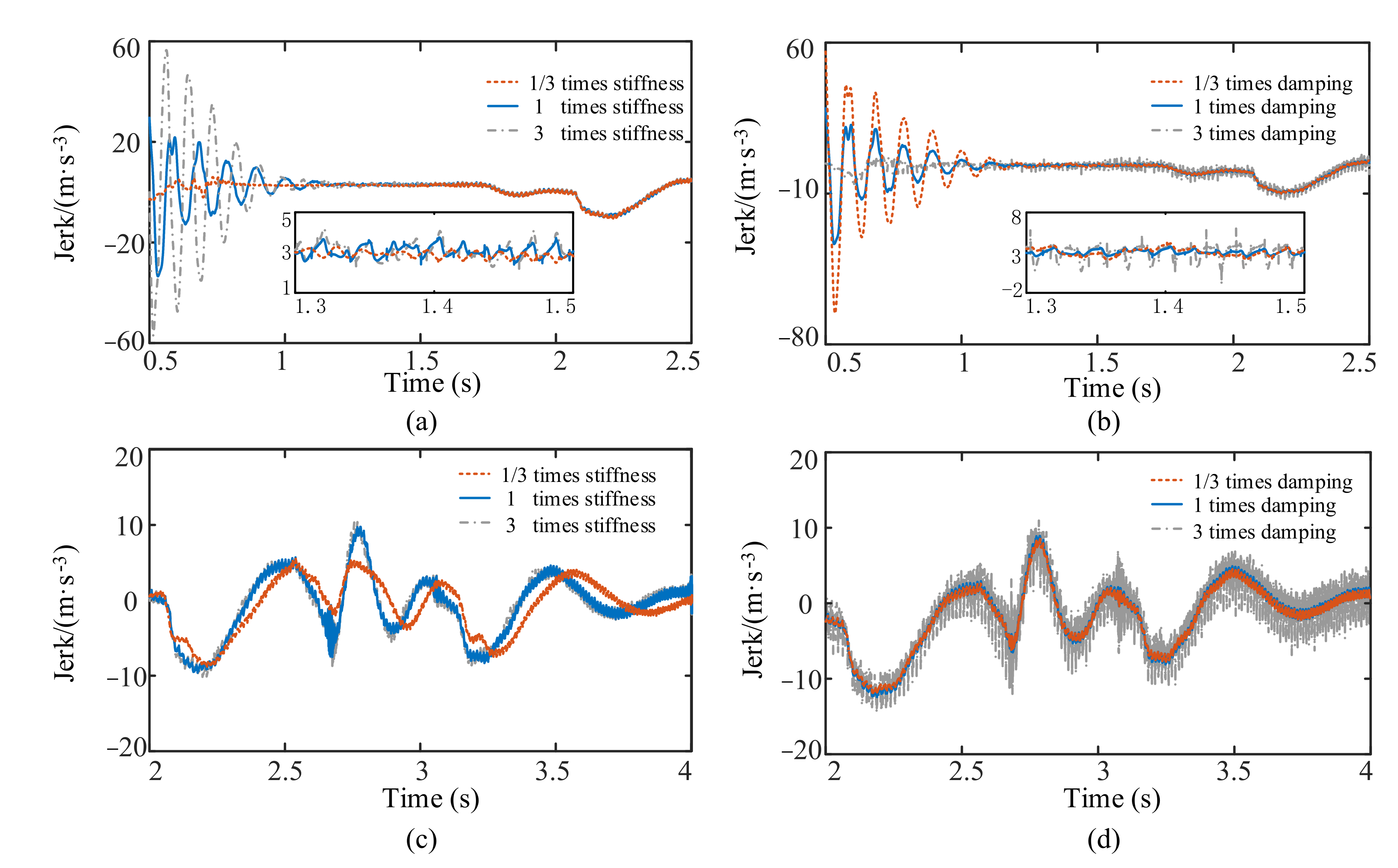
- (2)
- The powertrain mount’s stiffness affects the frequency and amplitude of the fluctuation in the vehicle’s jerk. The greater the mount stiffness, the greater are the fluctuation frequency of the jerk. The powertrain mount’s damping also significantly influences the fluctuation amplitude of the vehicle’s jerk. The greater the mount damping, the lower is the fluctuation amplitude of the jerk. The results provide a reference for the optimization of the powertrain mounting system.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| Symbol | Meaning |
| av,x | the longitudinal acceleration of the vehicle (excluding Powertrain) |
| ap,x | the longitudinal acceleration of the powertrain |
| C | the damping matrix |
| Cix(i = r, l, R) | damping of each mount in X direction |
| Ciz | damping of each mount in Z direction |
| Cp | equivalent damping of the powertrain mount |
| c2 | torsional damping of the DMF |
| c10 | the torsional damping of the output shaft |
| F | the driving force of the vehicle |
| Fix(i = r, l, R) | the force transmitted by each mount in the longitudinal direction |
| Fload | the vehicle total drag force |
| Fmou | the total force transmitted by the mount |
| i1 | the transmission ratio of power along the transmission path of clutch 1 |
| i2 | the transmission ratio of power along the transmission path of clutch 2 |
| ia1 | the ratio of final drive 1 |
| ia2 | the ratio of final drive 2 |
| Ic,yy | the inertia of powertrain in Y direction |
| Id | the equivalent moment of inertia of the driving plate of the clutch |
| Iv | the equivalent moment of inertia of the vehicle to the output shaft (including the powertrain mounting system) |
| Iv’ | the equivalent moment of inertia of the vehicle to the output shaft (not including the powertrain mounting system) |
| Ie | the moment of inertia of the engine crankshaft |
| Ieq | the equivalent moment of inertia of the driven plate of clutch |
| I1 | moment of inertia of intermediate shaft 1 and final reduction drive 1 |
| I2 | moment of inertia of intermediate shaft 2 and final reduction drive 2 |
| Ih | moment of inertia of external input shaft |
| K | the stiffness matrix |
| Kp | equivalent stiffness of the powertrain mount |
| k2 | torsional stiffness of the DMF |
| k10 | the torsional stiffness of the output shaft |
| Kix(i = r, l, r) | stiffness of each mount in X direction |
| Kiz | stiffness of each mount in Z direction |
| l | left mount |
| liz(i = r, l, R) | the distance from each mount to the Z direction of the centroid |
| lix(i = r, l, R) | the distance from each mount to the X direction of the centroid |
| M | the mass matrix |
| mp | the mass of the powertrain |
| mv | the mass of the vehicle without powertrain |
| O | the center of mass of powertrain |
| q | the generalized coordinates |
| r | the right mount |
| rw | the wheel radius |
| R | rear mount |
| X | the center of mass of the powertrain in the longitudinal direction |
| Xv | the longitudinal displacement of the vehicle |
| the longitudinal speed of the vehicle | |
| X | the longitudinal displacement of the powertrain |
| the longitudinal speed of the powertrain | |
| Z | the center of mass of powertrain in vertical direction |
| Y | the center of mass of the powertrain in the transverse direction |
| θ | the angular displacement of the powertrain |
| Tp | the total reaction torque |
| Te | the torque of the engine |
| Te’ | the reaction torque caused by the engine |
| Tgear,i (i = 1, 2) | the reaction torque caused by the torque transmitted through clutch 1 or clutch 2 |
| TB,j | the friction torque of bearing |
| Tin | transmission input torque |
| Tout | transmission output torque |
| Tc1 | transmission torque of clutch 1 |
| Tc2 | transmission torque of clutch 2 |
| Tload | the load torque |
| τ | the transmission speed ratio |
| θp | the angular displacement of the powertrain |
| θE | the angular displacement of engine |
| θD | the angular displacement of the driving plate of the clutch |
| θT | the angular displacement of the output shaft |
| θV | the angular displacement of vehicle |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value (kg·m2) | Parameters | Value (Nm/rad) |
|---|---|---|---|---|---|
| mv | 1620 kg | Ie | 0.03 | k1 | 95,000 |
| mp | 253kg | If1/If2 | 0.075 | k2 | 200 |
| rw | 0.35 m | Id | 0.01 | k3 | 200,000 |
| CD | 0.328 | Ic1 | 0.0072 | k4 | 200,000 |
| A | 2.12 m2 | Ic2 | 0.0125 | k5 | 870,000 |
| i1 | 4.214 | Ig1 | 0.0006 | k6 | 560,000 |
| i2 | 3.105 | Ig2 | 0.0013 | k7 | 470,000 |
| i3 | 1.724 | Ip1 | 0.005 | k8 | 165,000 |
| i4 | 1.268 | Ip2 | 0.005 | k9 | 165,000 |
| i5 | 1.27 | Ifd1 | 0.0028 | k10 | 40,000 |
| i6 | 1.049 | Ifd2 | 0.16 | Parameters | Value (Nms/rad) |
| i7 | 0.891 | Ifd3 | 0.0009 | c2 | 0.01 |
| iR | 3.227 | Idiff | 0.16 | c10 | 4 |
| ia1 | 3.944 | Ih | 0.6992 | - | - |
| ia2 | 3.227 | Iv | 202.45 | - | - |
| Mount Inertia Parameters | Value (kg·m2) | ||
|---|---|---|---|
| Im,xx | 16.712 | ||
| Im,yy | 7.717 | ||
| Im,zz | 14.829 | ||
| Im,xy | −1.026 | ||
| Im,yz | 3.209 | ||
| Im,zx | −1.482 | ||
| Mount Name | Mount Static Stiffness (N/mm) | ||
| x | y | z | |
| left mount | 130 | 530 | 400 |
| right mount | 150 | 150 | 180 |
| rear mount | 190 | 10 | 10 |
| Literature | Modeling Method | Comparison of Results and Findings |
|---|---|---|
| Reference [7] | The dynamic model of the DCT vehicle’s starting process was established without considering the influence of powertrain mount. | Because the influence of mounting is not considered, the fluctuation of the longitudinal acceleration of the vehicle caused by the deformation of the mounting during the starting process of the vehicle is underestimated. |
| Reference [17] | A dynamic model of vehicle with three degree of freedom powertrain mount was established. The nonlinear characteristics of dual mass flywheel and time-varying meshing stiffness of transmission gear system are not considered. | The influence of engine torque fluctuation and time-varying meshing stiffness on the mount is ignored, and the influence of the mount on the vehicle performance in the actual vehicle is not accurately reflected. |
| The method proposed in this paper | The vehicle dynamic model not only considers the dynamic torque of the engine, nonlinear characteristics of the dual-mass flywheel, and time-varying meshing stiffness of the DCT gear system, but also considers the vehicle coupling dynamics model of the powertrain mount with six degrees of freedom. | The powertrain mount has an impact on the fluctuation frequency and amplitude of the DCT-vehicle impact. When the torque of the vehicle transmission system changes greatly, such as under starting and tip in/tip out conditions, the mount has a greater impact on the dynamic performance of the vehicle. The DCT coupling dynamic model can reflect the influence of the actual vehicle mount on the vehicle performance better. |
References
- Fan, R.L.; Chen, J.A.; Zhang, C.Y.; Fei, Z.N.; Wang, P.; Wu, Q.F. Linearisation modelling and active performance simulation of active engine mounts with an oscillating coil actuator for automotive powertrain. Int. J. Veh. Des. 2022, 85, 178–196. [Google Scholar] [CrossRef]
- Walker, P.D.; Zhang, N. Modelling of dual clutch transmission equipped powertrains for shift transient simulations. Mech. Mach. Theory 2013, 60, 47–59. [Google Scholar] [CrossRef]
- Walker, P.D.; Zhang, N. Numerical investigations into shift transients of a dual clutch transmission equipped powertrains with multiple nonlinearities. J. Vib. Control 2013, 21, 1473–1486. [Google Scholar] [CrossRef]
- Chen, L.; Shi, W.; Chen, Z. Research on Damping Performance of Dual Mass Flywheel Based on Vehicle Transmission System Modeling and Multi-Condition Simulation. IEEE Access 2020, 8, 28064–28077. [Google Scholar] [CrossRef]
- Bai, J.; Wu, X.; Gao, F.; Li, H. Analysis of Powertrain Loading Dynamic Characteristics and the Effects on Fatigue Damage. Appl. Sci. 2017, 7, 1027. [Google Scholar] [CrossRef] [Green Version]
- Galvagno, E.; Velardocchia, M.; Vigliani, A. Dynamic and kinematic model of a dual clutch transmission. Mech. Mach. Theory 2011, 46, 794–805. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Wang, M.; Xia, F.; Qin, D.; Feng, J. Modeling and Control Approach for Dual Clutch Transmission Vehicles Starting Process Based on State-Dependent Autoregressive with Exogenous Model. IEEE Access 2020, 8, 158712–158726. [Google Scholar] [CrossRef]
- Wang, X.W.; Lu, T.L. Offline model predictive control approach to micro-slip control in gearshifts of dual clutch transmission. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2021, 236, 84–98. [Google Scholar] [CrossRef]
- Hao, Y.D.; He, Z.C.; Li, G.Y.; Li, E.; Huang, Y.Y.; Lian, C.C. Analysis and optimization of clutch judder based on a hybrid uncertain model with random and interval variables. Eng. Optim. 2018, 50, 1894–1913. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Lu, Z.; Liu, X.-L.; Sun, T.; Jing, X.; Shangguan, W.-B. Modeling and analysis of friction clutch at a driveline for suppressing car starting judder. J. Sound Vib. 2018, 424, 335–351. [Google Scholar] [CrossRef]
- Shangguan, W.; Sun, T.; Zheng, R.; Xie, J.; Hou, Q. Effect of the performance of the driven disc of the friction clutch on vehicle judder during starting. J. Vib. Eng. 2016, 29, 9. [Google Scholar]
- Ding, Z.; Chen, L.; Chen, J.; Cheng, X.; Yin, C. Scheduling Period Selection Based on Stability Analysis for Engagement Control Task of Automatic Clutches. Appl. Sci. 2021, 11, 8636. [Google Scholar] [CrossRef]
- Wang, D.; Hu, M.; Li, B.; Qin, D.; Sun, D. Study on the Influence Factors Upon the Propensity to Stick-Slip Phenomenon During Vehicle Start-Up Process. IEEE Access 2020, 8, 12343–12353. [Google Scholar] [CrossRef]
- Wang, D.; Hu, M.; Li, B.; Qin, D.; Sun, D. Modular modeling and dynamic response analysis of a driveline system during start-up process. Mech. Mach. Theory 2021, 156, 104136. [Google Scholar] [CrossRef]
- Kim, S.; Choi, S. Control-oriented modeling and torque estimations for vehicle driveline with dual-clutch transmission. Mech. Mach. Theory 2018, 121, 633–649. [Google Scholar] [CrossRef]
- Hong, D.; Kim, B. Quantification of Active Structural Path for Vibration Reduction Control of Plate Structure under Sinusoidal Excitation. Appl. Sci. 2019, 9, 711. [Google Scholar] [CrossRef] [Green Version]
- Galvagno, E.; Gutierrez, P.; Velardocchia, M.; Vigliani, A. A Theoretical Investigation of the Influence of Powertrain Mounts on Transmission Torsional Dynamics. SAE Int. J. Veh. Dyn. Stab. NVH 2017, 1, 145–155. [Google Scholar] [CrossRef]
- Huang, W.H.; Liu, H.J. Application of fuzzy dynamic weights drivability evaluation model in tip-in condition. J. Vib. Control 2019, 25, 739–747. [Google Scholar] [CrossRef]
- Crowther, A.R.; Singh, R.; Zhang, N.; Chapman, C. Impulsive response of an automatic transmission system with multiple clearances: Formulation, simulation and experiment. J. Sound Vib. 2007, 306, 444–466. [Google Scholar] [CrossRef]
- Long, C.; Shi, W.; Chen, Z. Research on dynamic behavior of torsional absorber in powertrain system considering nonlinear factors. J. Vib. Control 2021, 27, 1656–1667. [Google Scholar] [CrossRef]
- Chang, S.L.; Xia, Y.F.; Pang, J.; Yang, L. Investigation on friction-induced judder of vehicle driveline based on a nonlinear friction model. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 36, 09544070211063274. [Google Scholar] [CrossRef]
- Li, R.; Wang, J. Gear System Dynamics; Science Press: Beijing, China, 1997. [Google Scholar]
- Shen, J.; Hu, N.; Zhang, L.; Luo, P. Dynamic Analysis of Planetary Gear with Root Crack in Sun Gear Based on Improved Time-Varying Mesh Stiffness. Appl. Sci. 2020, 10, 8379. [Google Scholar] [CrossRef]
- Gu, Y.-K.; Li, W.-F.; Zhang, J.; Qiu, G.-Q. Effects of Wear, Backlash, and Bearing Clearance on Dynamic Characteristics of a Spur Gear System. IEEE Access 2019, 7, 117639–117651. [Google Scholar] [CrossRef]
- Yi, Y. Electromechanical Coupling Dynamics of Cutting Transmission System of Coal-Mining Machine Operating in Variable Speed/Variable Load Conditions; Chongqing University: Chongqing, China, 2018. [Google Scholar]
- Kahraman, A.; Singh, R. Interactions between time-varying mesh stiffness and clearance non-linearities in a geared system. J. Sound Vib. 1991, 146, 21. [Google Scholar] [CrossRef]
- Fu, T.; Rakheja, S.; Shangguan, W.B. Design of a hybrid proportional electromagnetic dynamic vibration absorber for control of idling engine vibration. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 234, 56–70. [Google Scholar] [CrossRef]
- Jiang, M.; Liao, S.; Guo, Y.; Wu, J. The improvement on vibration isolation performance of hydraulic excavators based on the optimization of powertrain mounting system. Adv. Mech. Eng. 2019, 11, 168781401984998. [Google Scholar] [CrossRef]
- Guo, R.; Zhang, T. Vehicle Powertrain Mounting System; Shanghai Tongji University Press: Shanghai, China, 2013. [Google Scholar]
- Liu, X.-A.; Ma, Y.; Jiang, C.; Sun, X. Identification and Robustness Analysis of Powertrain Excitation Forces. Shock. Vib. 2020, 2020, 4536484. [Google Scholar] [CrossRef]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Z.; Qin, D.; Li, A.; Feng, J.; Liu, Y. Analysis of the Influence of a Powertrain Mounting System on a Dual-Clutch Transmission Vehicle under Typical Working Conditions. Appl. Sci. 2022, 12, 7439. https://doi.org/10.3390/app12157439
Guo Z, Qin D, Li A, Feng J, Liu Y. Analysis of the Influence of a Powertrain Mounting System on a Dual-Clutch Transmission Vehicle under Typical Working Conditions. Applied Sciences. 2022; 12(15):7439. https://doi.org/10.3390/app12157439
Chicago/Turabian StyleGuo, Zheng, Datong Qin, Antai Li, Jihao Feng, and Yonggang Liu. 2022. "Analysis of the Influence of a Powertrain Mounting System on a Dual-Clutch Transmission Vehicle under Typical Working Conditions" Applied Sciences 12, no. 15: 7439. https://doi.org/10.3390/app12157439