
Efficiency Analysis of Herringbone Star Gear Train Transmission with Different Load-Sharing Conditions


Abstract
:1. Introduction
2. Significance and Methods
3. Gear Train Efficiency and Meshing Force Model Analysis
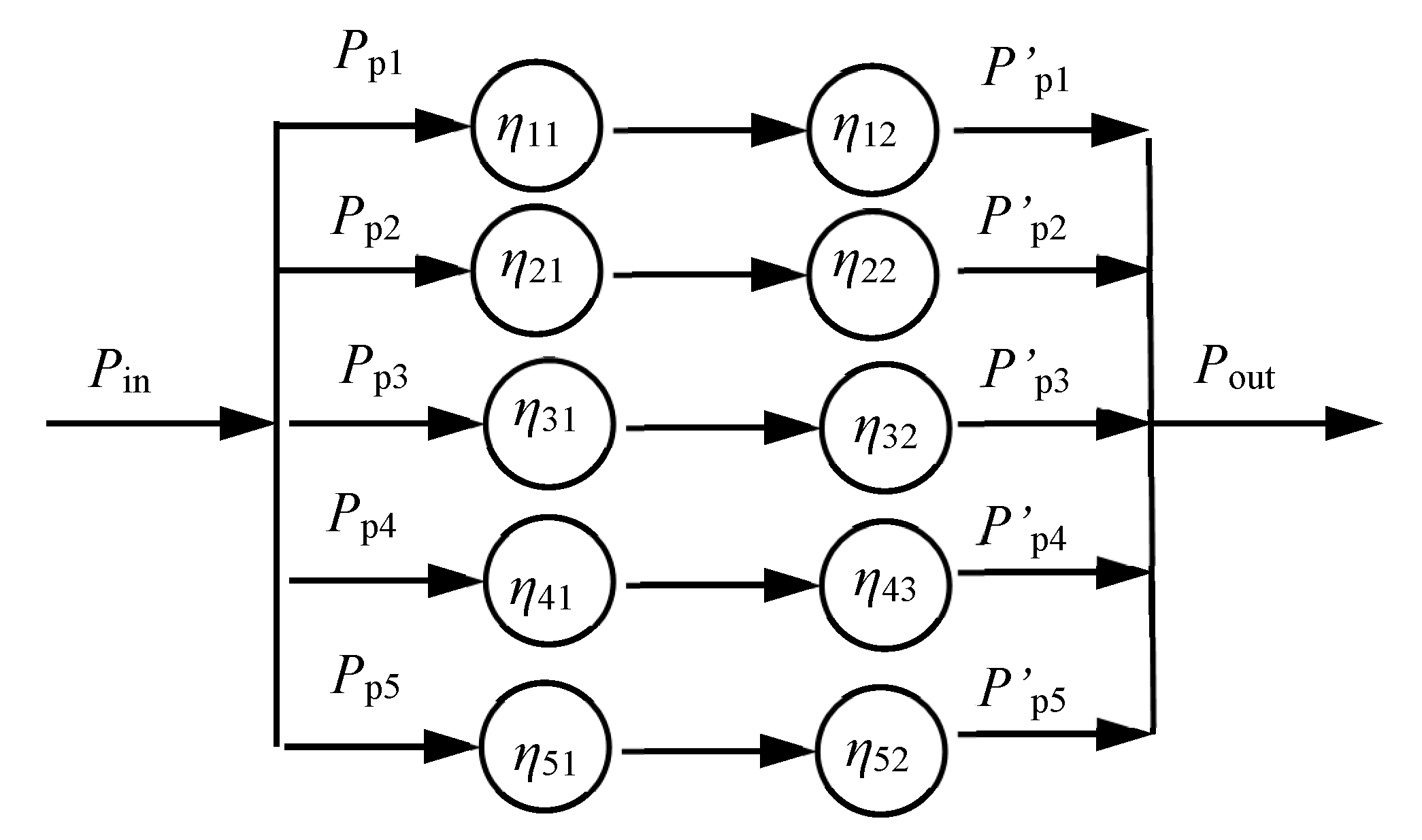
3.1. Power Flow and Efficiency Calculation of Star Gear Train
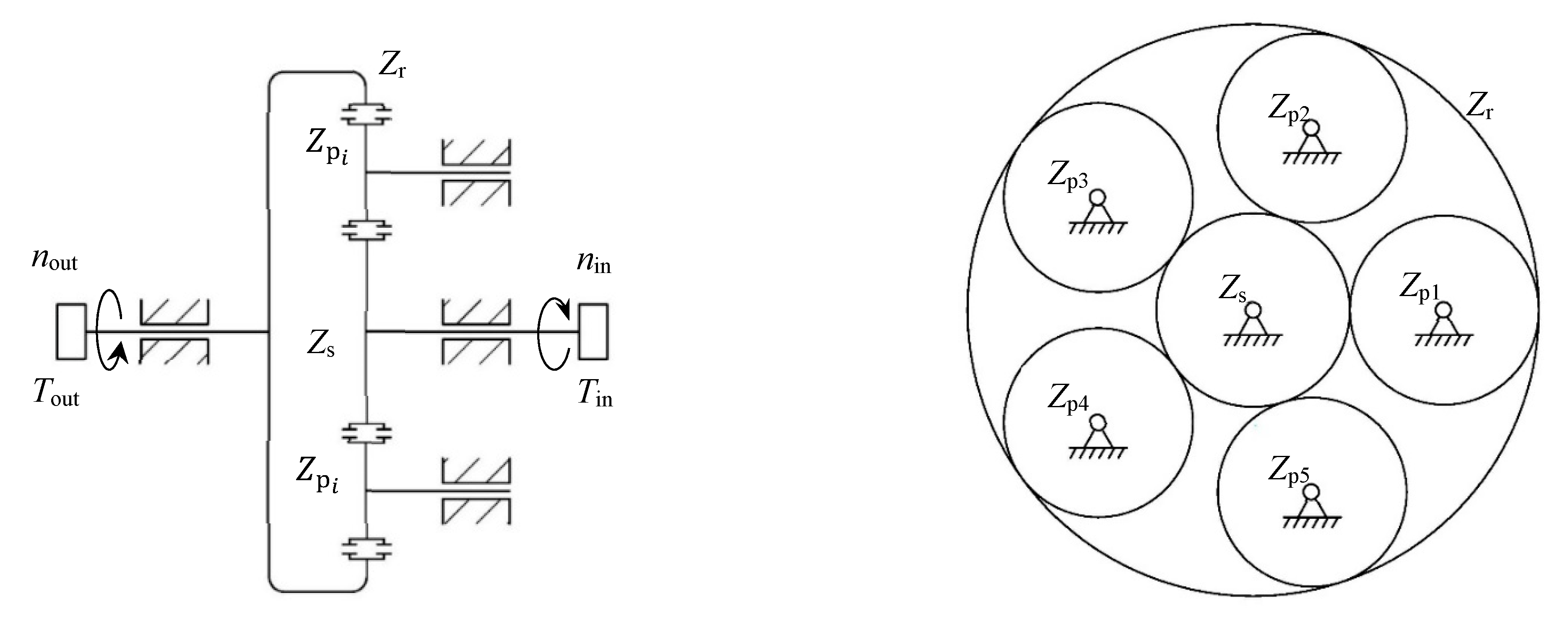
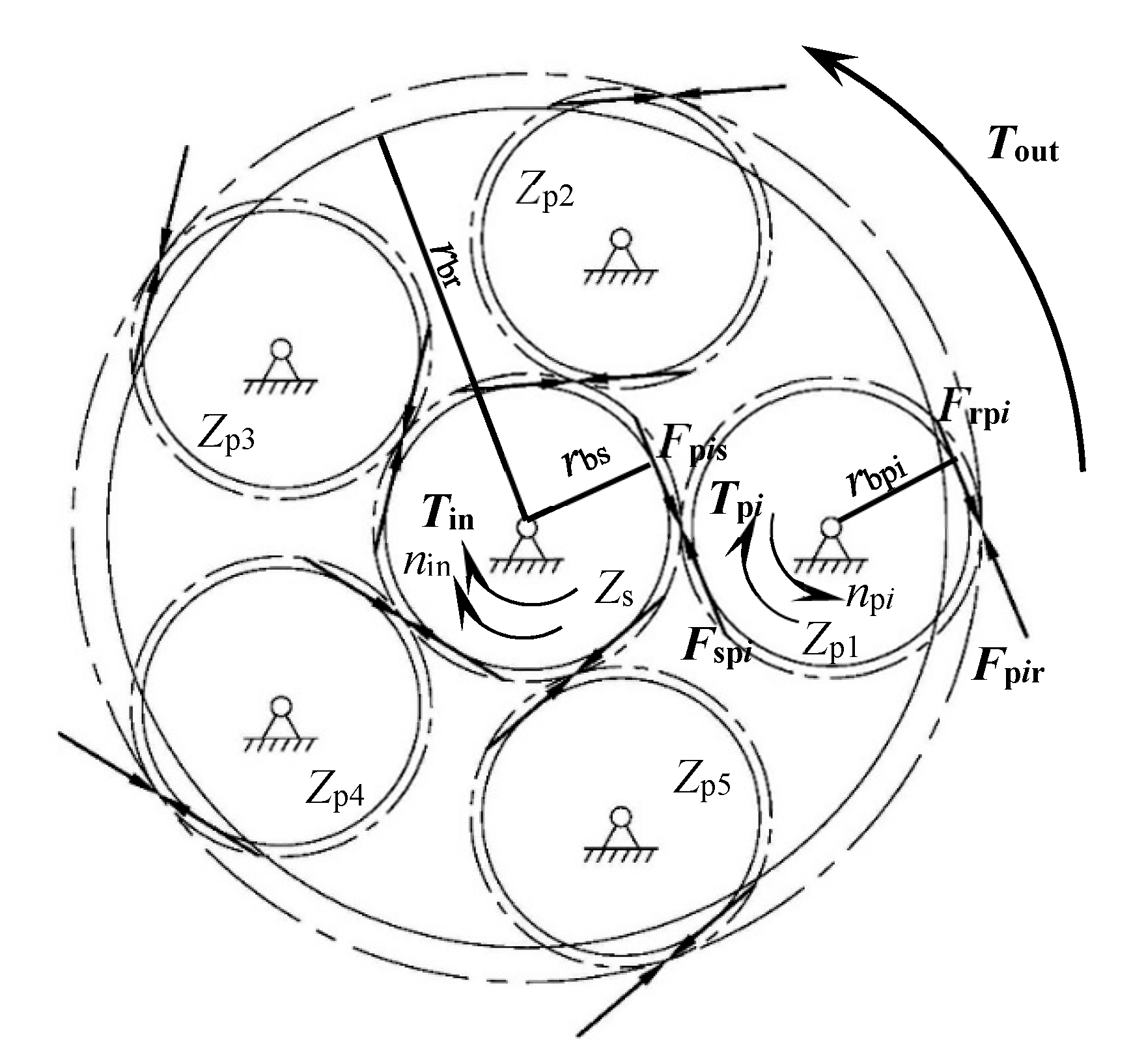
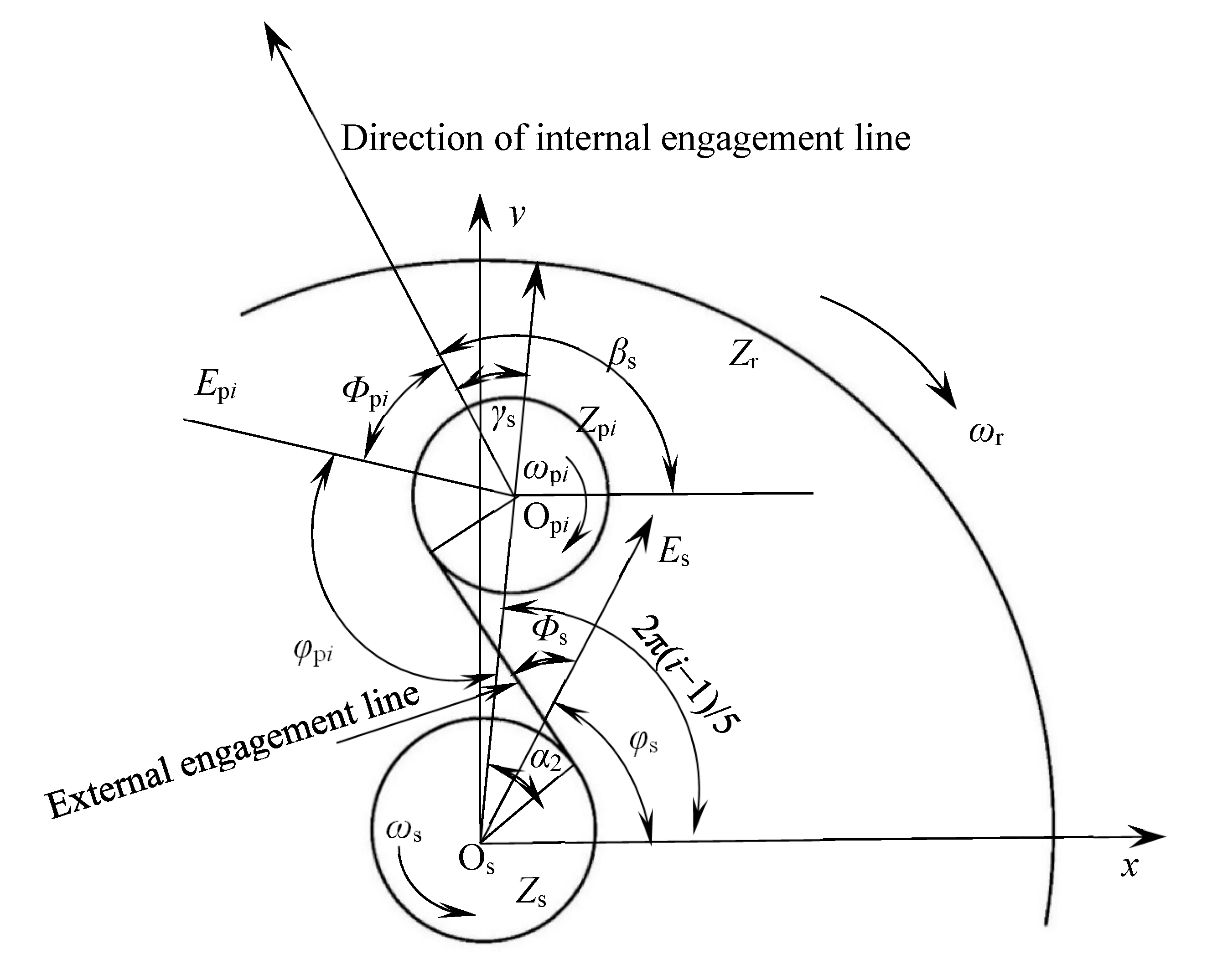
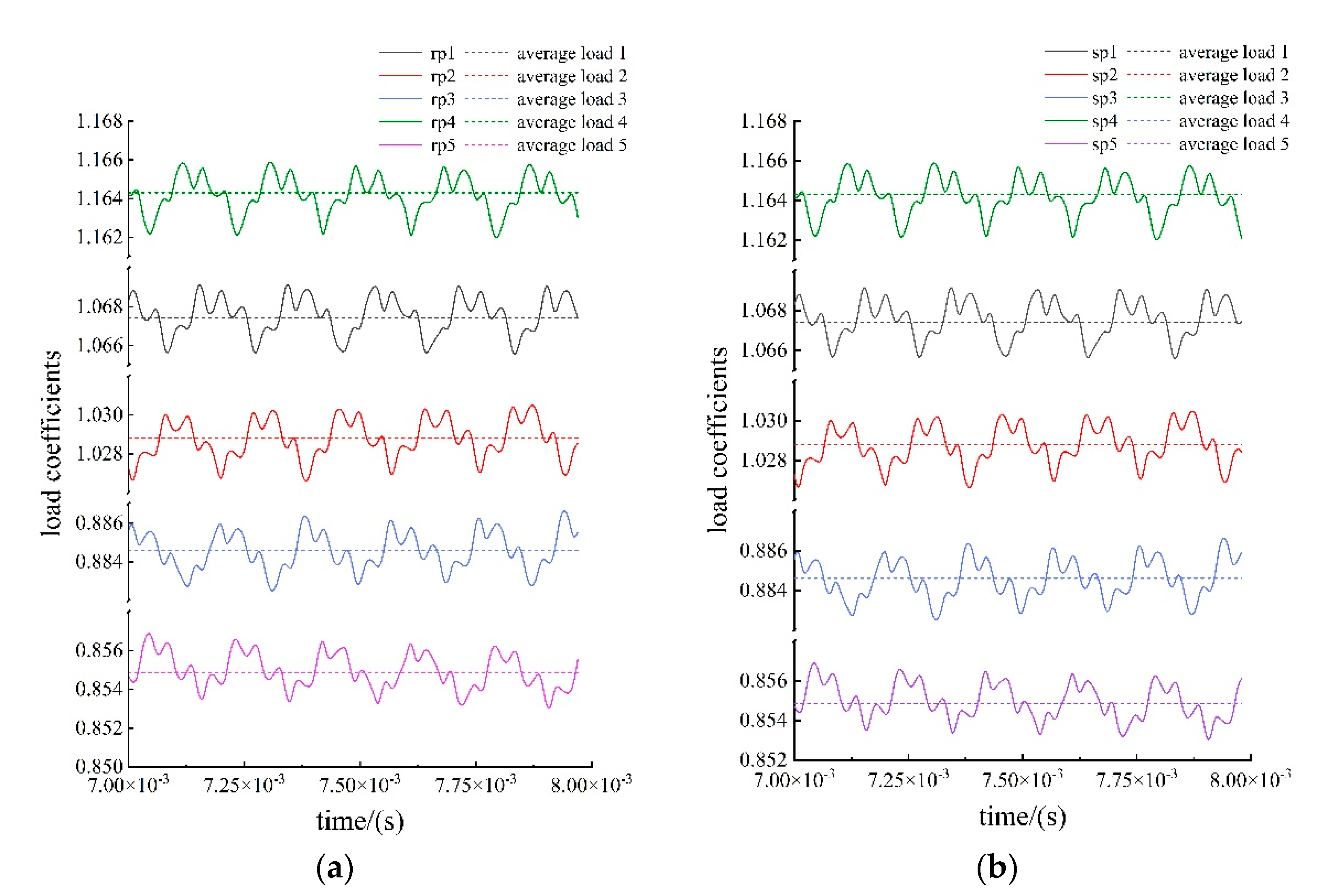
3.2. The Meshing Force Analysis of the Five Star Gears
4. The Effect of Error on the Meshing Force in Star Gear Train
4.1. Ideal Relative Displacement on Meshing Line
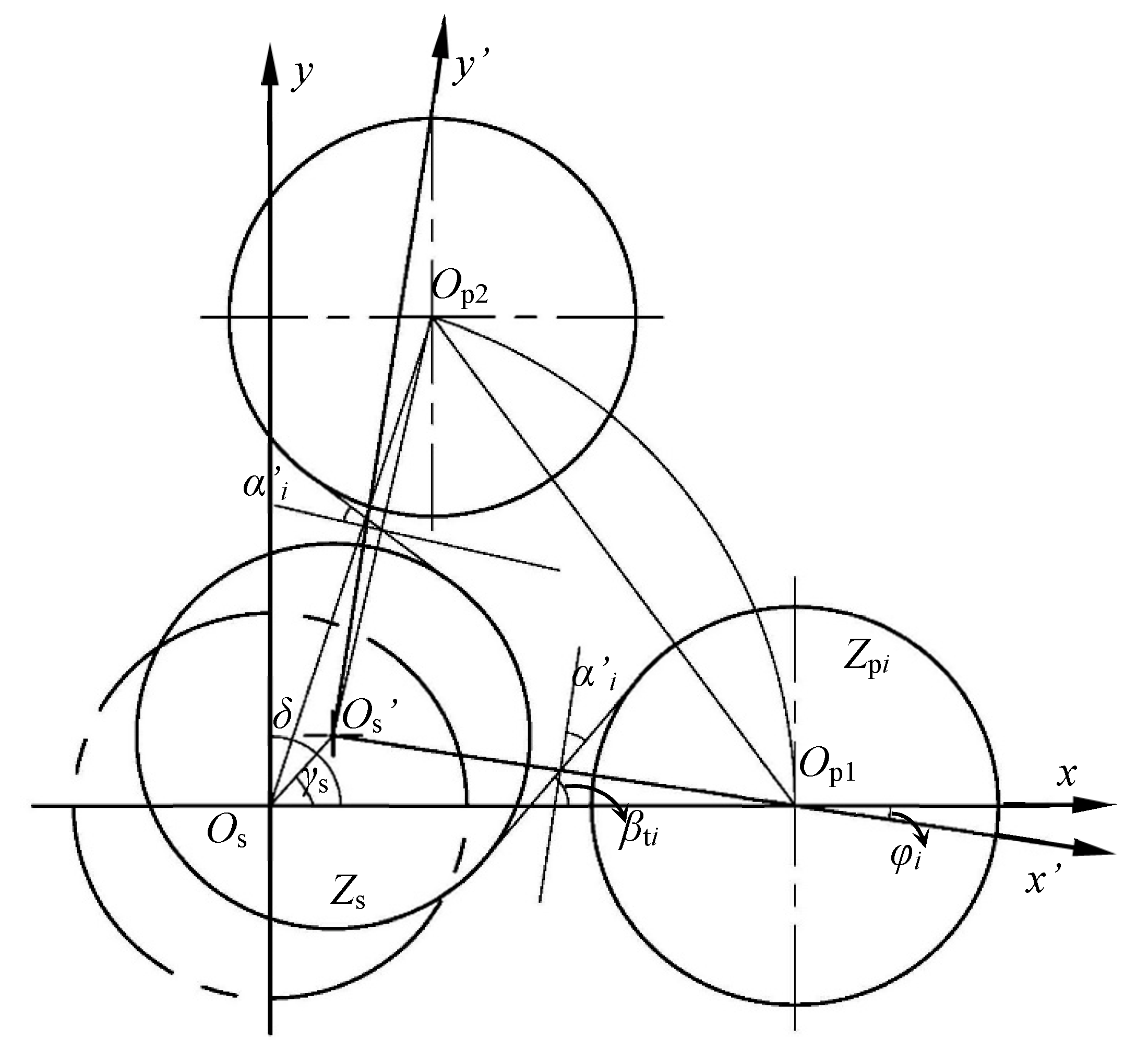
4.2. Relative Displacement of Meshing Line Caused by Error
5. Case Analysis of Load-Sharing Performance
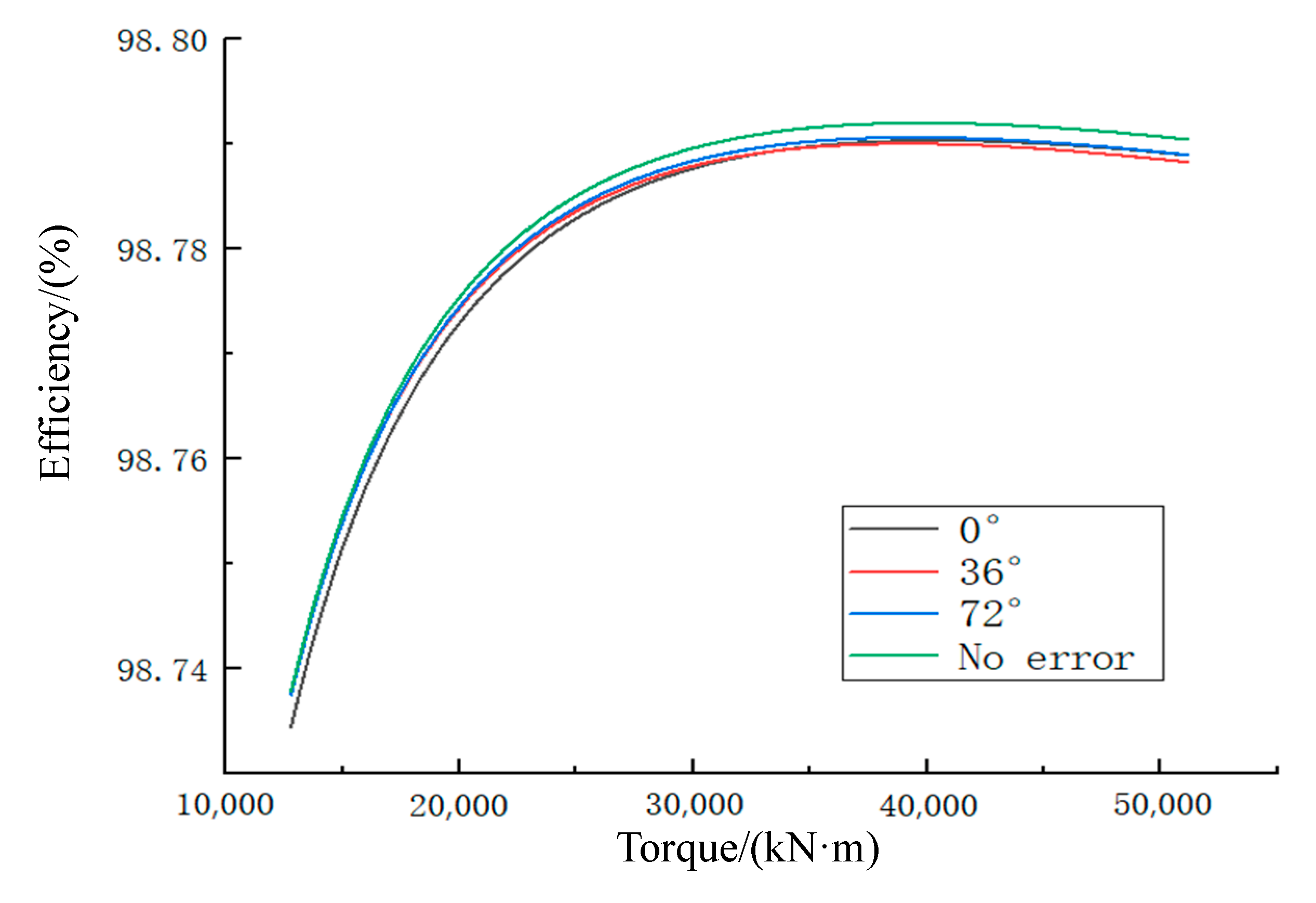
5.1. Case Analysis of Load-Sharing Performance on Efficiency
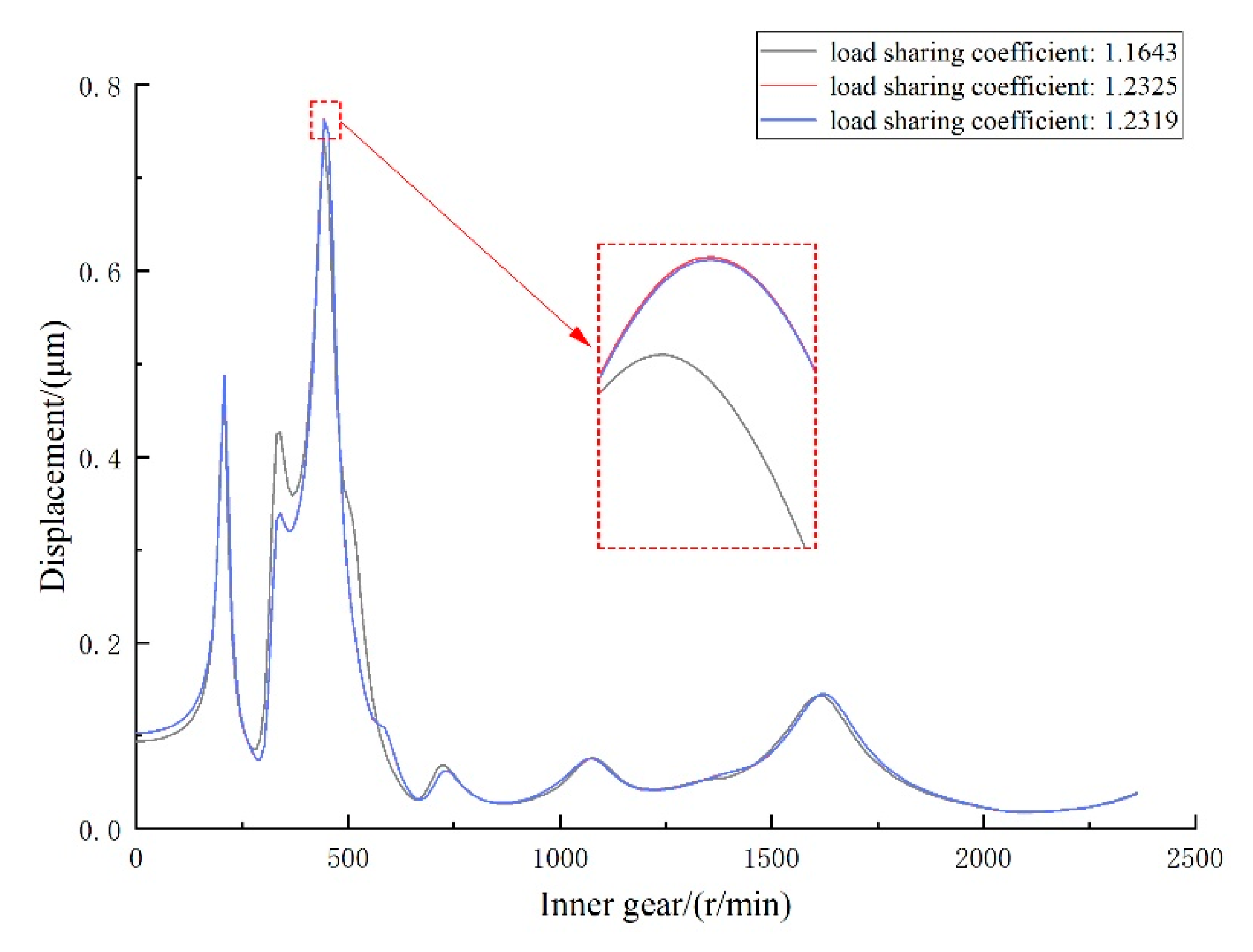
5.2. Influence of Load-Sharing Performance on Vibration of Gearbox
6. Conclusions
- (1)
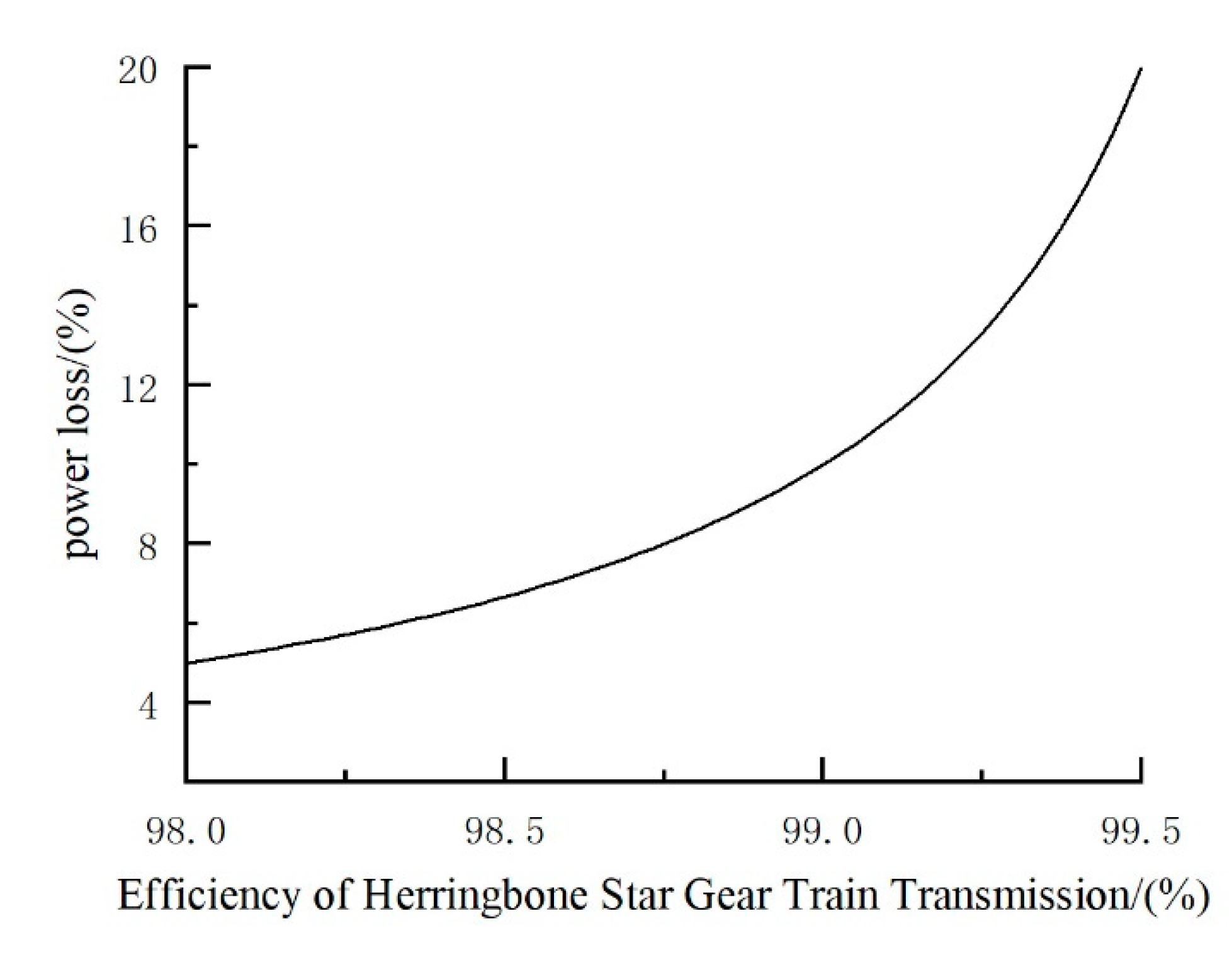
- The total efficiency of the star gear train can be regarded as a parallel unit composed of multiple shunt branches, which can be improved by improving the efficiency of the shunt branch and adjusting the load coefficient of the branch.
- (2)
- The adjustment of the load coefficient affecting gear train efficiency can be realized by adjusting the center distance and center distance azimuth between the sun gear and the inner gear ring. Regardless of the change in the load coefficient between the shunt branches, the sum of the meshing forces of the five meshing pairs in the inner or outer meshing group is fixed. Ideally, the five meshing forces form a regular pentagon.
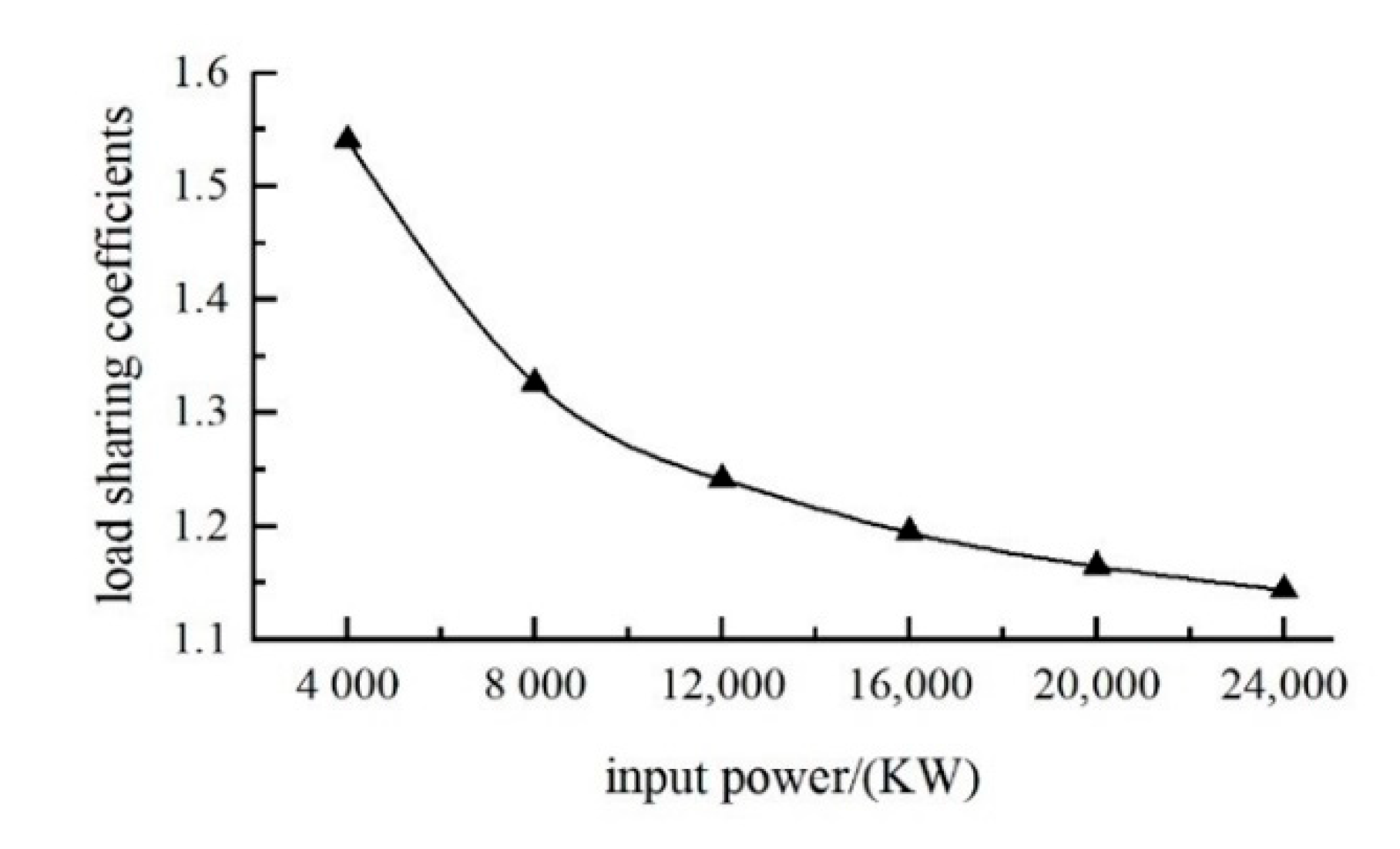
- (3)
- The load-sharing coefficient of the gear train decreases with the increase in power. Without load-sharing measures, the load coefficient of the star gear train with five-way power splitting is about 1.16, which is slightly lower than the efficiency of theoretical load sharing.
- (4)
- The uneven distribution of five shunt loads not only reduces the efficiency of the gear train, but also increases the vibration of the gearbox. The greater the load-sharing coefficient, the lower the efficiency and the larger the vibration.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Talbot, D.C.; Kahraman, A.; Singh, A. An Experimental Investigation of the Efficiency of Planetary Gear Sets. In Proceedings of the ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Washington, DC, USA, 28–31 August 2011. [Google Scholar]
- Xu, H. Development of a Generalized Mechanical Efficiency Prediction Methodology for Gear Pairs. Ph.D. Thesis, The Ohio State University, Columbus, OH, USA, 2005. [Google Scholar]
- Chen, C. Power flow and efficiency analysis of epicyclic gear transmission with split power. Mech. Mach. Theory 2013, 59, 96–106. [Google Scholar] [CrossRef]
- Yang, F.; Feng, J.; Zhang, H. Power flow and efficiency analysis of multi-flow planetary gear trains. Mech. Mach. Theory 2015, 92, 86–99. [Google Scholar] [CrossRef]
- Yada, T. Review of gear efficiency equation and force treatment. JSME Int. J. Ser. C 1997, 40, 1–8. [Google Scholar] [CrossRef]
- Diab, Y.; Ville, F.; Velex, P. Investigations on power losses in high-speed gears. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2006, 220, 191–198. [Google Scholar] [CrossRef]
- Hu, M.; Hu, Y.; Li, J.; Liu, W. Reliability Analysis on Random Meshing Efficiency of Helical Gear based on Monte Carlo Method. J. Mech. Transm. 2021, 45, 5. [Google Scholar]
- Bao, H.; Li, L.; Jin, G.; Liu, F. Calculation and Analysis of Encased Planetary Train Efficiency. Mach. Build. Autom. 2019, 48, 5. [Google Scholar]
- Xue, H.; Liu, G.; Yang, X. Simplified Method for the Power Flow and Transmission Efficiency Analysis of Epicyclic Gear Train. J. Mech. Transm. 2017, 41, 43–48. [Google Scholar]
- Zhou, C.; Tang, J.; Zhong, Z.; Wu, C. Studies on the Calculation of Teeth Surface Friction Coefficients in Gear Drive. Lubr. Eng. 2006, 182, 185–191. [Google Scholar]
- Song, C. Dynamic Characteristic and Meshing Efficiency Analysis of Double Helical Star Gear System with Tooth Spalling Defect. Master’s Thesis, Chongqing University, Chongqing, China, 2020. [Google Scholar]
- Yang, Z.; Chen, M. Mesh Efficiency of the Gears in 2K-H(C) Type. J. China Text. Univ. 1997, 23, 82–87. [Google Scholar]
- Zhang, J.; Chen, B.; Zhang, C.; Wu, C. Dynamic analysis for spur gears considering friction effect. J. Vib. Shock 2012, 31, 126–132. [Google Scholar]
- Laus, L.P.; Simas, H.; Martins, D. Efficiency of gear trains determined using graph and screw theories. Mech. Mach. Theory 2012, 52, 296–325. [Google Scholar] [CrossRef]
- Zhao, N.; Wei, F.; Hui, G.; Kang, S. The effect on internal gear-pair actual meshing by the basic parameters of gear. Mod. Manuf. Eng. 2009, 8, 71–73. [Google Scholar]
- Ren, F.; Qin, D.; Wu, X. Load sharing performances of herringbone planetary gears considering manufacturing errors. J. Cent. South Univ. (Sci. Technol.) 2016, 258, 474–481. [Google Scholar]
- Dai, H.; Chen, F.; Xun, C.; Long, C. Numerical calculation and experimental measurement for gear mesh force of planetary gear transmissions. Mech. Syst. Signal Process. 2022, 162, 108085. [Google Scholar] [CrossRef]
- Mo, S.; Zhang, Y.D.; Wu, Q. Research on multi split load sharing mechanism of GTF engine star drive system. J. Aeronaut. Dyn. 2016, 31, 763–768. [Google Scholar]
- Liu, W. Research on Dynamic Efficiency of Double Helical Star Gear Trains. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2017. [Google Scholar]
- Zhu, Z. Research on Load Sharing and Dynamics Characteristics of Encased Differential Herringbone Train. Ph.D. Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2013. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Sun Gear | Star Gear | Annular Gear |
|---|---|---|---|
| Tooth number | 43 | 42 | 127 |
| Tooth width (mm) | 60 × 2 | 59 × 2 | 57 × 2 |
| Rotation speed (r/min) | 7463 | −7640.69 | −2526.84 |
| Power (KW) | 20,000 | ||
| Normal module (mm) | 3.5 | ||
| Normal pressure angle (°) | 22.5 | ||
| Spiral angle (°) | 26.969 |
| Standard Installation | Installation Error with the Sun Gear | Installation Error with the Inner Gear | ||||
|---|---|---|---|---|---|---|
| load coefficient | Internal | External | Internal | External | Internal | External |
| 1.164307 | 1.164307 | 1.231918 | 1.231930 | 1.232545 | 1.232509 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, D.; Wang, S.; Li, D.; Yang, Y. Efficiency Analysis of Herringbone Star Gear Train Transmission with Different Load-Sharing Conditions. Appl. Sci. 2022, 12, 5970. https://doi.org/10.3390/app12125970
Li D, Wang S, Li D, Yang Y. Efficiency Analysis of Herringbone Star Gear Train Transmission with Different Load-Sharing Conditions. Applied Sciences. 2022; 12(12):5970. https://doi.org/10.3390/app12125970
Chicago/Turabian StyleLi, Dong, Shuyan Wang, Dongliang Li, and Yong Yang. 2022. "Efficiency Analysis of Herringbone Star Gear Train Transmission with Different Load-Sharing Conditions" Applied Sciences 12, no. 12: 5970. https://doi.org/10.3390/app12125970