
Dynamic Uncertainty Quantification and Risk Prediction Based on the Grey Mathematics and Outcrossing Theory


Abstract
:1. Introduction
2. Bounds Determination of Time-Invariant and Time-Variant Uncertainties under Insufficient Samples
2.1. Basics of Static and Dynamic Interval Models
2.2. General Procedure of the Grey System Theory
2.3. Feasible Implementation
3. Dynamic Response Analysis by Utilizing the Interval Quantitative Results
3.1. Uncertainty Estimation with the Series Expansion Approach
3.2. Correlation Representation Achieved by Novel Optimization-Based Strategy
4. Non-Probabilistic Time-Dependent Reliability Assessment
5. Numerical Example
5.1. Cases of Time-Invariant and Time Variant Uncertainty Quantification Analysis
5.2. Cases of Time-Dependent Reliability Evaluation via Available Quantified Results
5.3. Discussions on the Results
- (1)
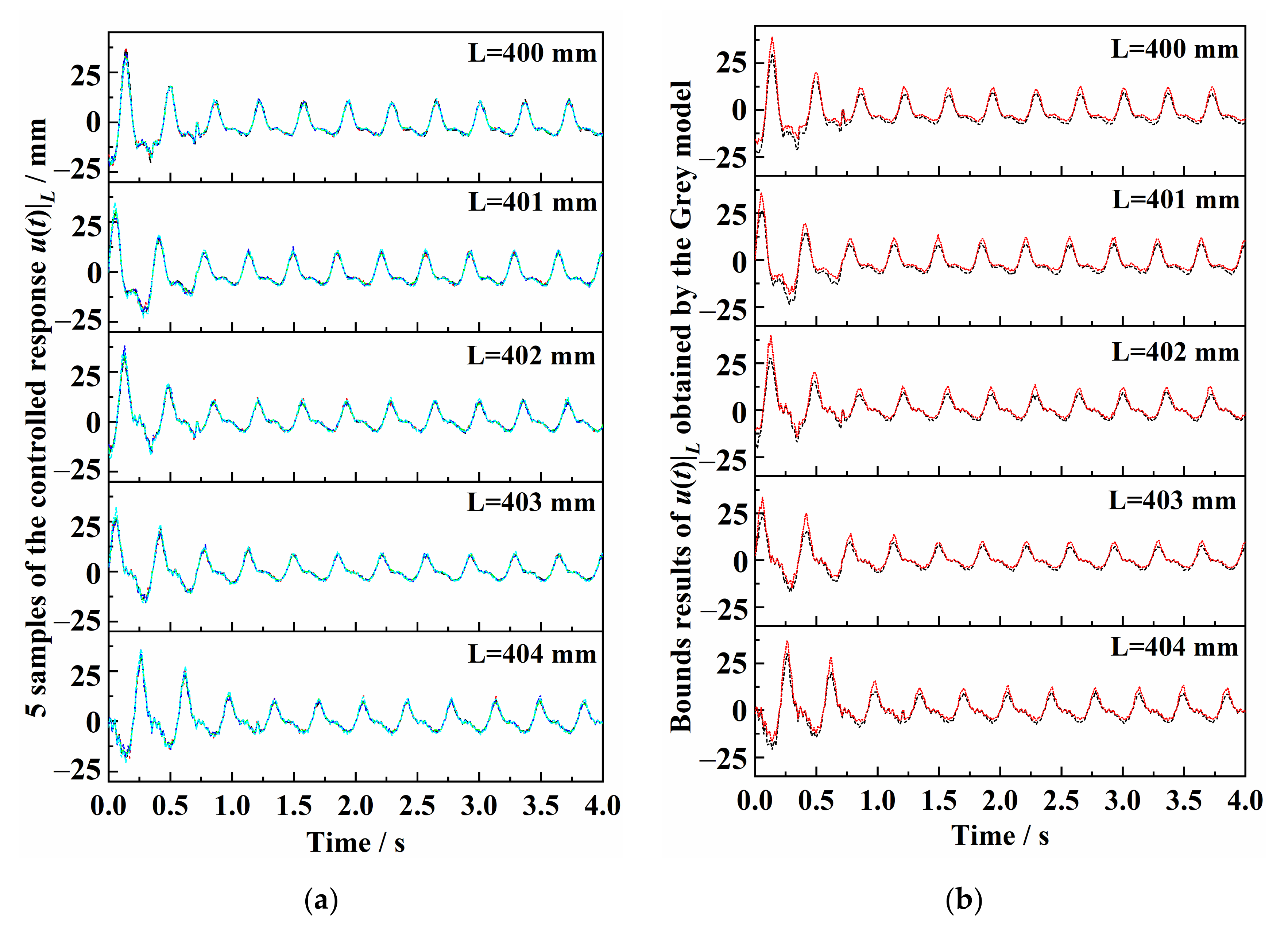
- From the aspect of uncertainty quantification, the quantitative results derived from the Grey systematic theory (with respect to either the static variables , , , , or the dynamic process ) may better envelop the initial data, as is embodied in Table 2 and Figure 5. Moreover, as an improvement for the traditional Grey model, the way of determination of the Grey constant coefficients is a more precise treatment for UQ analysis under small sample limitations. Indeed, it will, to a certain degree, avoid undesirable interval extension effects by using the relationship of the topological locations among all the sample points/curves.
- (2)
- From the point of uncertainty propagation, the developed methodology combined with the state-space transformation and the second-order Taylor expansion may effectively calculate and , although the factors of material dispersion (as summarized in (1)), the material degeneration , and the changing ply patterns () are all taken into account. Furthermore, it should also be indicated that, compared with metal structures, the uncertainty influences in composite structures are much more obvious, and the mechanical performances under different ply angels vary even more (if , but if ).
- (3)
- From the prospect of safety estimation, the time-dependent reliability obtained by the present analytical method matches the one derived from the Monte Carlo method, as we expected (the accuracy verification). However, there are two aspects that should be stressed: For one thing, the results on the basis of former non-probabilistic method are a little more conservative because of fewer assumptions made about the quantified uncertainties (based on the engineering practice). Furthermore, the accuracy of the reliability results from the Monte Carlo method greatly depends on the amount of samples (1,000,000 samples in the example), which means a computation-intensive and time-consuming situation has to be faced (the superiority of efficiency).
6. Test Verification
7. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Symbols | |
| y | |
| The time instant | |
| The variance process vector of y | |
| c | The Grey constant coefficient |
| s | |
| M | The mass matrix |
| P | The damping matrix |
| K | The stiffness matrix |
| The external load vector | |
| The response vector of displacement | |
| The response vector of velocity | |
| The response vector of acceleration | |
| The initial condition of displacement | |
| The initial condition of velocity | |
| The state vector of the state-space | |
| Derivative of the state vector respect to time | |
| The operator for description of the perturbation quantity | |
| The transformation matrix | |
| The original sample set | |
| The sample set after the transformation | |
| The hyper-volume of the “box” | |
| The time increment | |
| The measurements of safety | |
| The measurements of failure | |
| The possibility of a specific event | |
| The minimum | |
| The time-varying limit state | |
| The maximum | |
| equals to zero | |
| The possibility index of an event | |
| Counters | |
| i | is the total number of static uncertain parameters |
| j | is the total number of time instant |
| k | is the total number of time instant |
| l | |
| Superscripts | |
| The interval set | |
| The upper bound | |
| The lower bound | |
| The center value | |
| The radius | |
| The mean value | |
| Subscripts | |
| Count quantity | |
| Count quantity | |
References
- Choi, J.-H.; Jensen, J.J.; Nielsen, U.D. Estimation of Extreme Roll Motion Using the First Order Reliability Method. In Practical Design of Ships and Other Floating Structures; Springer: Singapore, 2019; pp. 682–690. [Google Scholar]
- Nguyen, H.L.; Tran, V.T.; Pham, Q.T. Reliability-based analysis of machine structures using second-order reliability method. J. Adv. Mech. Des. Syst. Manuf. 2019, 13, JAMDSM0063. [Google Scholar]
- Breitung, K. Asymptotic Approximations for Probability Integrals; Springer: Berlin/Heidelberg, Germany, 1994. [Google Scholar]
- Polidori, D.C.; Beck, J.L.; Papadimitriou, C. New Approximations for Reliability Integrals. J. Eng. Mech. 1999, 125, 466–475. [Google Scholar] [CrossRef]
- Balu, A.; Rao, B. Inverse structural reliability analysis under mixed uncertainties using high dimensional model representation and fast Fourier transform. Eng. Struct. 2012, 37, 224–234. [Google Scholar] [CrossRef]
- Ben-Haim, Y.; Elishakoff, I. Convex Models of Uncertainty in Applied Mechanics; Elsevier: Amsterdam, The Netherlands, 1990. [Google Scholar]
- Ben-Haim, Y. A non-probabilistic concept of reliability. Struct. Saf. 1994, 14, 227–245. [Google Scholar] [CrossRef]
- Wang, L.; Liu, J.; Yang, C.; Wu, D. A novel interval dynamic reliability computation approach for the risk evaluation of vibration active control systems based on PID controllers. Appl. Math. Model. 2020, 92, 422–446. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, X.; Wu, Z.; Chen, W. Evidence theory-based reliability optimization for cross-scale topological structures with global stress, local displacement, and micro-manufacturing constraints. Struct. Multidiscip. Optim. 2021, 65, 23. [Google Scholar] [CrossRef]
- Guo, S.-X.; Lu, Z.-Z. A non-probabilistic robust reliability method for analysis and design optimization of structures with uncertain-but-bounded parameters. Appl. Math. Model. 2015, 39, 1985–2002. [Google Scholar] [CrossRef]
- Jiang, C.; Bi, R.; Lu, G.; Han, X. Structural reliability analysis using non-probabilistic convex model. Comput. Methods Appl. Mech. Eng. 2012, 254, 83–98. [Google Scholar] [CrossRef]
- Jiang, C.; Li, W.; Han, X.; Liu, L.; Le, P. Structural reliability analysis based on random distributions with interval parameters. Comput. Struct. 2011, 89, 2292–2302. [Google Scholar] [CrossRef]
- Guo, J.; Du, X. Reliability Analysis for Multidisciplinary Systems with Random and Interval Variables. AIAA J. 2010, 48, 82–91. [Google Scholar] [CrossRef]
- Palm, B.G.; Bayer, F.M.; Cintra, R.J. Improved Point Estimation for the Rayleigh Regression Model. IEEE Geosci. Remote Sens. Lett. 2020, 39, 171–191. [Google Scholar] [CrossRef]
- Magnus, J.R. Gauss on least-squares and maximum-likelihood estimation. Arch. Hist. Exact Sci. 2022, 1–6. [Google Scholar] [CrossRef]
- Kwasniok, F. Semiparametric maximum likelihood probability density estimation. PLoS ONE 2021, 16, e0259111. [Google Scholar] [CrossRef] [PubMed]
- Johansen, S. Estimation and Hypothesis Testing of Cointegration Vectors in Gaussian Vector Autoregressive Models. Econometrica 1991, 59, 1551–1580. [Google Scholar] [CrossRef]
- Torabi, H. A General Method for Estimating and Hypotheses Testing Using Spacings. J. Stat. Theory Appl. 2008, 8, 163–168. [Google Scholar]
- Friedman, N.; Linial, M.; Nachman, I.; Pe’Er, D. Using Bayesian networks to analyze expression data. J. Comput. Biol. 2000, 7, 601–620. [Google Scholar] [CrossRef]
- Simon, C.; Weber, P.; Evsukoff, A. Bayesian networks inference algorithm to implement Dempster Shafer theory in reliability analysis. Reliab. Eng. Syst. Saf. 2008, 93, 950–963. [Google Scholar] [CrossRef] [Green Version]
- Jensen, F.V. Bayesian Networks and Decision Graphs; Springer: Berlin/Heidelberg, Germany, 2015; Volume 50, p. 362. [Google Scholar]
- Elishakoff, I.; Fang, T.; Sarlin, N.; Jiang, C. Uncertainty quantification and propagation based on hybrid experimental, theoretical, and computational treatment. Mech. Syst. Signal Process. 2020, 147, 107058. [Google Scholar] [CrossRef]
- Schweppe, F. Recursive state estimation: Unknown but bounded errors and system inputs. IEEE Trans. Autom. Control 1968, 13, 22–28. [Google Scholar] [CrossRef]
- Zhu, L.; Elishakoff, I.; Starnes, J. Derivation of multi-dimensional ellipsoidal convex model for experimental data. Math. Comput. Model. 1996, 24, 103–114. [Google Scholar] [CrossRef]
- Durieu, C.; Walter, É.; Polyak, B. Multi-Input Multi-Output Ellipsoidal State Bounding. J. Optim. Theory Appl. 2001, 111, 273–303. [Google Scholar] [CrossRef]
- Wang, L.; Liu, Y.; Li, M. Time-dependent reliability-based optimization for structural-topological configuration design under convex-bounded uncertain modeling. Reliab. Eng. Syst. Saf. 2022, 221, 108361. [Google Scholar] [CrossRef]
- Jiang, C.; Han, X.; Lu, G.; Liu, J.; Zhang, Z.; Bai, Y. Correlation analysis of non-probabilistic convex model and corresponding structural reliability technique. Comput. Methods Appl. Mech. Eng. 2011, 200, 2528–2546. [Google Scholar] [CrossRef]
- Wang, L.; Wang, X.; Wang, R.; Chen, X. Time-Dependent Reliability Modeling and Analysis Method for Mechanics Based on Convex Process. Math. Probl. Eng. 2015, 2015, 914893. [Google Scholar] [CrossRef]
- Andrieu-Renaud, C.; Sudret, B.; Lemaire, M. The PHI2 method: A way to compute time-variant reliability. Reliab. Eng. Syst. Saf. 2004, 84, 75–86. [Google Scholar] [CrossRef]
- Chen, J.-B.; Li, J. Dynamic response and reliability analysis of non-linear stochastic structures. Probabilistic Eng. Mech. 2005, 20, 33–44. [Google Scholar] [CrossRef]
- Zhang, J.; Du, X. Time-Dependent Reliability Analysis for Function Generator Mechanisms. J. Mech. Des. 2011, 133, 586–599. [Google Scholar] [CrossRef]
- Jia, D.-W.; Wu, Z.-Y. An importance sampling reliability method combining Kriging and Gaussian Mixture Model through ring subregion strategy for multiple failure modes. Struct. Multidiscip. Optim. 2022, 65, 61. [Google Scholar] [CrossRef]
- Dey, A.; Mahadevan, S. Reliability Estimation with Time-Variant Loads and Resistances. J. Struct. Eng. 2000, 126, 612–620. [Google Scholar] [CrossRef]
- Wu, D.; Huang, L.; Pan, B.; Wang, Y.; Wu, S. Experimental study and numerical simulation of active vibration control of a highly flexible beam using piezoelectric intelligent material. Struct. Environ. Eng. 2014, 37, 10–19. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, L.; Gu, K.; Li, M. Artificial Neural Network (ANN)—Bayesian Probability Framework (BPF) based method of dynamic force reconstruction under multi-source uncertainties. Knowl. Based Syst. 2021, 237, 107796. [Google Scholar] [CrossRef]
- Xia, X.; Chen, X.; Zhang, Y.; Wang, Z. Grey bootstrap method of evaluation of uncertainty in dynamic measurement. Measurement 2008, 41, 687–696. [Google Scholar] [CrossRef]
- Wang, L.; Wang, X.; Chen, X.; Wang, R. Time-variant reliability model and its measure index of structures based on a non-probabilistic interval process. Acta Mech. 2015, 226, 3221–3241. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, X.; Liu, D. Size-controlled cross-scale robust topology optimization based on adaptive subinterval dimension-wise method considering interval uncertainties. Eng. Comput. 2022, 1–18. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | No. | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 129.20 | 9.34 | 0.28 | 5.23 | 9 | 132.19 | 9.07 | 0.30 | 4.85 | |
| 2 | 131.59 | 9.53 | 0.33 | 4.97 | 10 | 132.00 | 9.73 | 0.35 | 5.00 | |
| 3 | 130.63 | 9.08 | 0.33 | 5.16 | 11 | 130.39 | 9.21 | 0.34 | 5.34 | |
| 4 | 132.01 | 9.34 | 0.33 | 5.15 | 12 | 128.28 | 8.67 | 0.33 | 4.98 | |
| 5 | 131.04 | 8.94 | 0.34 | 5.15 | 13 | 135.30 | 9.18 | 0.32 | 5.13 | |
| 6 | 120.61 | 9.04 | 0.33 | 4.81 | 14 | 137.33 | 9.28 | 0.33 | 5.25 | |
| 7 | 127.69 | 8.99 | 0.32 | 5.11 | 15 | 141.69 | 10.73 | 0.31 | 5.47 | |
| 8 | 133.65 | 9.36 | 0.35 | 5.08 | 16 | 126.91 | 9.39 | 0.33 | 5.45 |
| The Grey Constant Coefficient | The Mean Value | The Lower Bound | The Upper Bound | |
|---|---|---|---|---|
| 1 | 0.9997 | 0.9704 | 0.9223 | 0.8998 | 0.8394 | 0.8185 | ||
| 1 | 1 | 1 | 0.9993 | 0.9913 | 0.9871 | 0.9771 | ||
| 1 | 1 | 1 | 0.9910 | 0.9757 | 0.9526 | 0.9338 | ||
| 1 | 0.9918 | 0.9855 | 0.9528 | 0.9398 | 0.9039 | 0.8370 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Liu, J. Dynamic Uncertainty Quantification and Risk Prediction Based on the Grey Mathematics and Outcrossing Theory. Appl. Sci. 2022, 12, 5389. https://doi.org/10.3390/app12115389
Wang L, Liu J. Dynamic Uncertainty Quantification and Risk Prediction Based on the Grey Mathematics and Outcrossing Theory. Applied Sciences. 2022; 12(11):5389. https://doi.org/10.3390/app12115389
Chicago/Turabian StyleWang, Lei, and Jiaxiang Liu. 2022. "Dynamic Uncertainty Quantification and Risk Prediction Based on the Grey Mathematics and Outcrossing Theory" Applied Sciences 12, no. 11: 5389. https://doi.org/10.3390/app12115389