The model predictive control (MPC) is a controller that predicts real-time input of the system to obtain the desired optimal output solution based on the previous and current information in each time step [
1]. However, the MPC applied to nonlinear systems needs heavy computational loads [
2]. To alleviate the loads, an institutive idea is to transform a nonlinear system to a linear one, and feedback linearization (FL) is a common approach to design a controller through transforming a nonlinear system into a linear system, which then can be controlled by applying linear control theory [
3]. Thus, there are many papers investigating various applications combining the MPC and FL.
Kurtz and Henson applied the combination to a continuous stirred tank reactor with both the input and output constraints, where the input-output feedback linearization was used to obtain a linear model and then the model was discretized to apply a discrete-time MPC [
4]. Roca et al. applied the combination to the outlet water temperature in a solar collector field, where the input–output FL was applied first to have a linear model and then a discrete-time filtered Smith predictor-based model predictive control algorithm was used to deal with disturbances and system uncertainties [
5]. Mohammed et al. applied the combination to a quadriceps muscle actuated knee joint, which were decoupled as inner- and outer-loop dynamics. The inner-loop dynamics control was performed by using a pole placement controller, and the outer-loop dynamics control was controlled by an input-output FL cascaded with the MPC, where the inner-loop dynamics stability was proved [
6]. Schnelle and Eberhard applied the combination to the trajectory tracking control of a serial manipulator with a passive joint, where the underactuated system was converted by the input–output FL first, and then a discrete-time MPC. with both the input and input rate constraints, was applied [
7]. Chen et al. applied the combination to the temperature control of a greenhouse, where the discrete-time unscented Kalman filter was used to estimate the parameters and states of the system first, and then an input-state FL cascaded with a discrete-time MPC was applied [
8]. Sotelo et al. applied the combination to a single-link flexible joint robot and the inverted pendulum, where the nonlinear systems were transformed into linear systems by input-state FL through the Lie derivative. Besides this, the nonlinear output equations were approximated by using the finite-dimension Taylor expansion, and then the Euler backwards method was used, leading to discrete-time modes for applying the discrete-time MPC [
9]. Yue et al. applied the combination to the trajectory tracking control of an underactuated two-wheeled inverted pendulum vehicle, where an approximated input-output feedback linearization was used to reduce computational burden, and then a discrete-time MPC with input and state constraints was applied [
10]. Carron et al. applied the combination to a compliant 6-DOF robotic arm, where an inverse dynamics FL was used to obtain a discrete-time linar model, the extended Kalman filter was used to estimate the states, and a discrete-time MPC was incorporated with the model [
11]. Bao et al. presented the combination to a hybrid neuroprosthetic system, where an FL was used to reduce computational loads, and then an MPC was applied through a barrier cost function to deal with the nonlinear input constrains, originally converted from linear ones [
12]. Chen et al. presented the combination in cascade and applied it to the control of automotive fuel cell oxygen excess ratio, where an FL cascaded with a continuous-time MPC was used to perform anti-disturbance control. Besides, an extended state observer was used to overcome the slow responses and interference errors from measurements [
13]. Guo et al. applied the combination to the secondary voltage and frequency control of islanded microgrid, where each distributed generator was individually controlled by a discrete-time MPC cascaded with an input-output FL to have a sparse communication network [
14]. Quan et al. applied the combination to the hydrogen excess ratio regulation of proton exchange membrane fuel cells, where a pseudo-reference discrete-time MPC cascaded with an input-output FL was developed to reduce the overshoots of responses [
15]. Liu et al. applied their combination to the eddy current de-tumbling of space tumbling targets, where an input-output FL cascaded with a discrete-time MPC with input constraints was developed to form a quadratic programming problem [
16]. Cai et al. applied the combination to a quadcopter, where a discrete-time MPC cascaded with an input-output feedback linearization was applied to perform a trajectory tracking control. Furthermore, a disturbance observer was designed to estimate wind disturbances [
17]. Naimi et al. applied the combination to a pressurized water reactor, where a dynamic neural network model of the reactor was identified by using the quasi-Newton algorithm, and a discrete-time MPC cascaded with an input-output FL was applied, based on the identified neural network model [
18].
In review of literature, there are diverse combinations of the MPC and FL applied to nonlinear systems with constraints. However, it is difficult to implement the complex formulations in the real systems, and the required computational cost is high. Moreover, there are a limited number of papers addressing input constraints. In this study, the combination of the continuous-time MPC and FLis still proposed, but the combination aims to simplify the formulations and reduce computational cost for trajectory tracking control of nonlinear systems with constraints. The proposed approach first applies input-state feedback linearization to obtain the canonical form of a linear system, and the control signal is converted to be a virtual input signal, which is a function of the states of the original nonlinear system. Further to this, the input constraints are converted to be state-dependent. To simplify the formulations, and to reduce the computational cost, a limited number of Laguerre functions are utilized to approximate the control signals in the MPC, and then the approximated signals are substituted into the input constraints and the linear state equations. Therefore, a constrained quadratic optimization problem can be formulated, where the determined design parameters are the coefficients associated with the Laguerre functions, and the Hildreth’s quadratic programming algorithm is used to determine the coefficients. Moreover, this study also summarizes several schemes to perform the linearization of nonlinear systems, and the illustrative examples show the control performance comparisons of the schemes, combined with linear control strategies. The rest of the paper is organized as follows.
Section 2 presents common linear or linear-like formulation schemes.
Section 3 proposes a new combination of the MPC and feedback linearization.
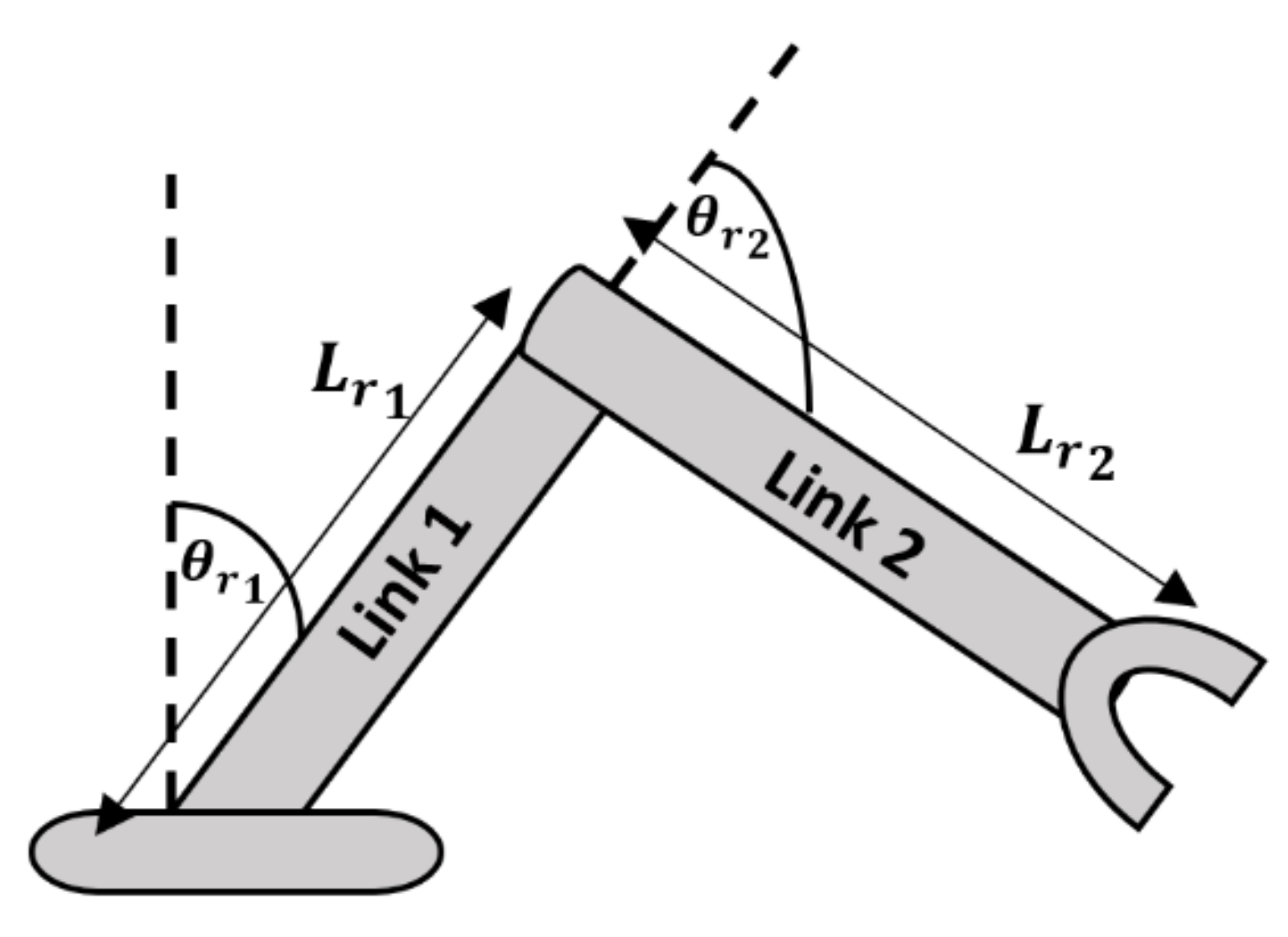
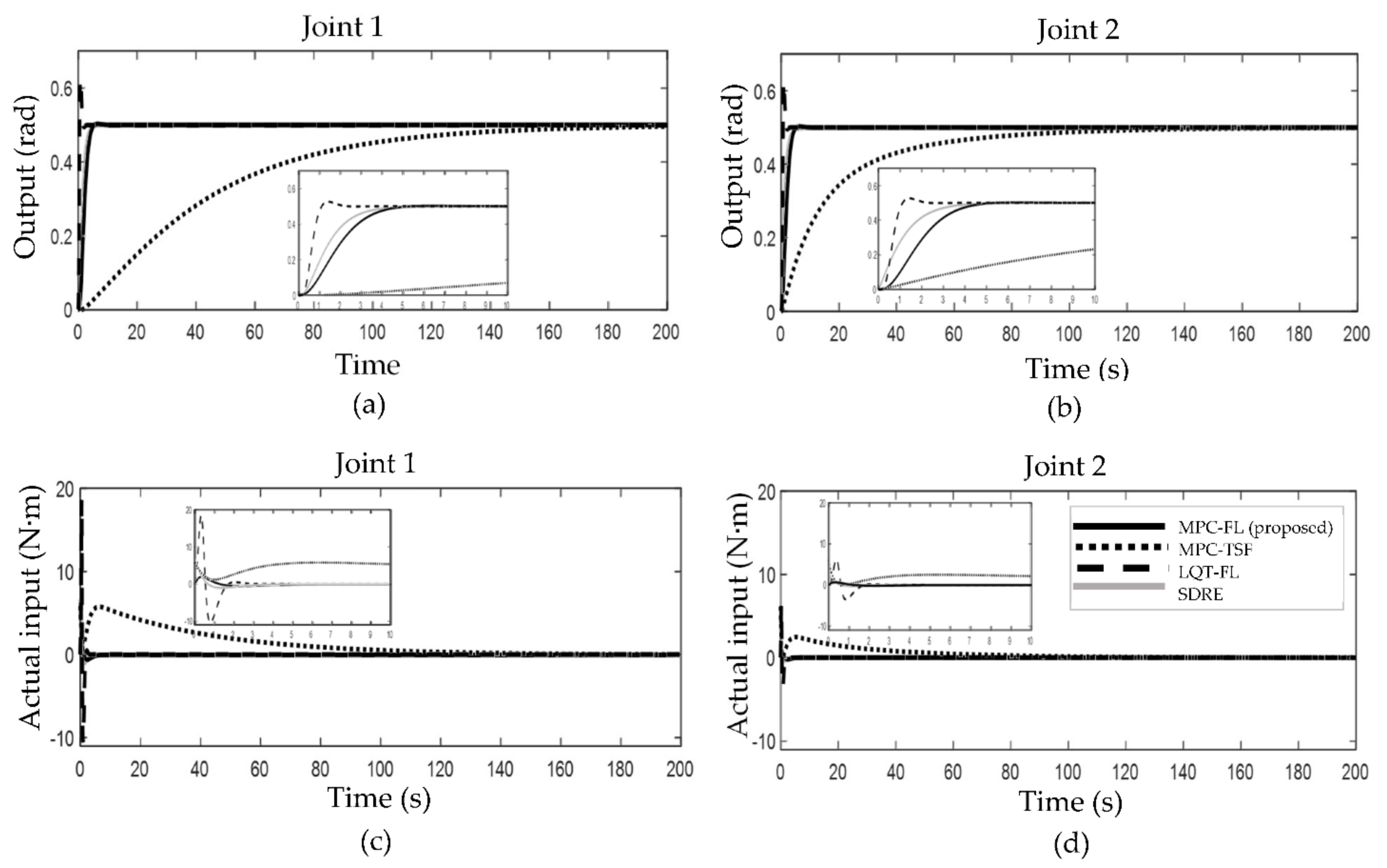
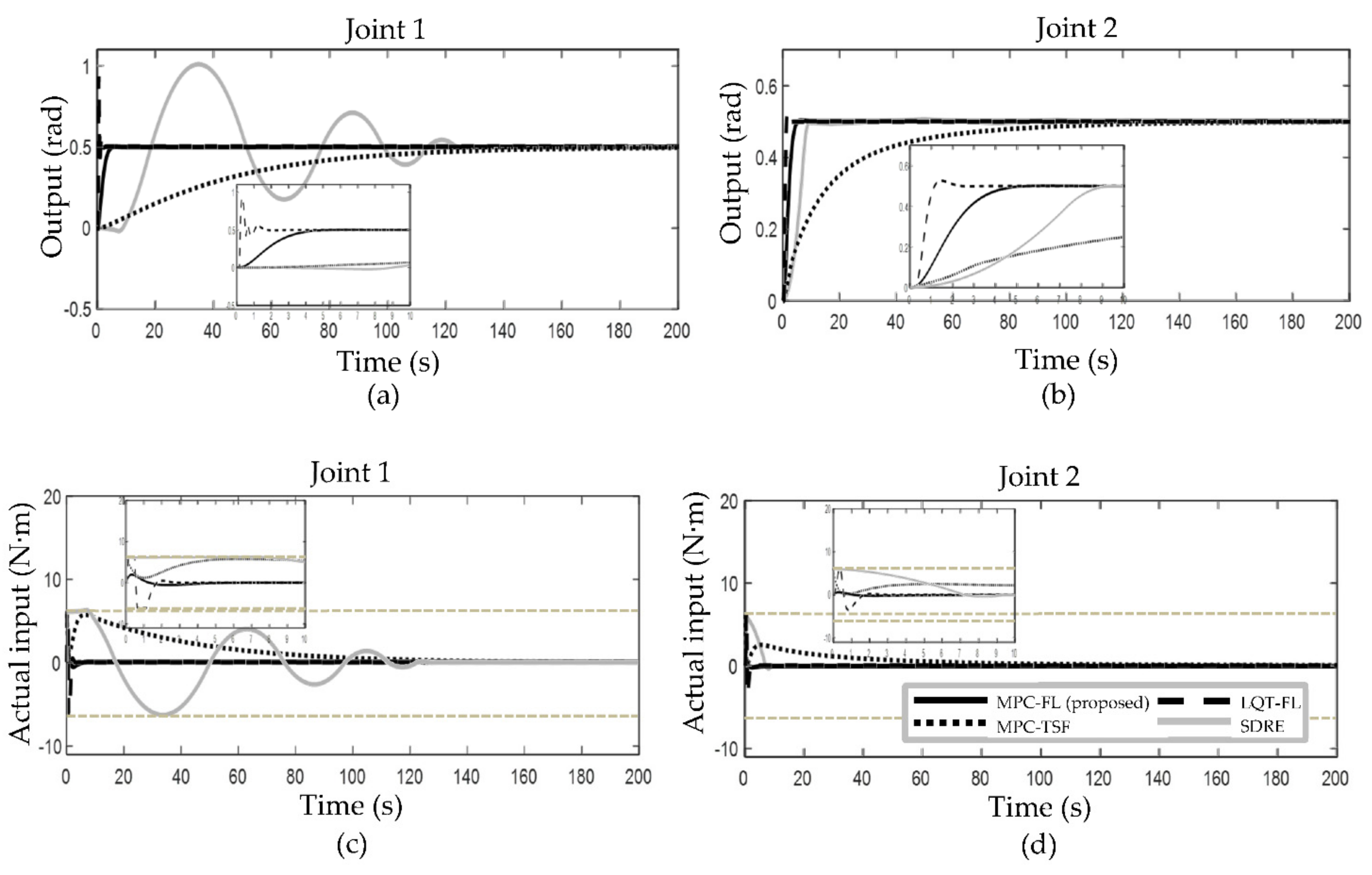
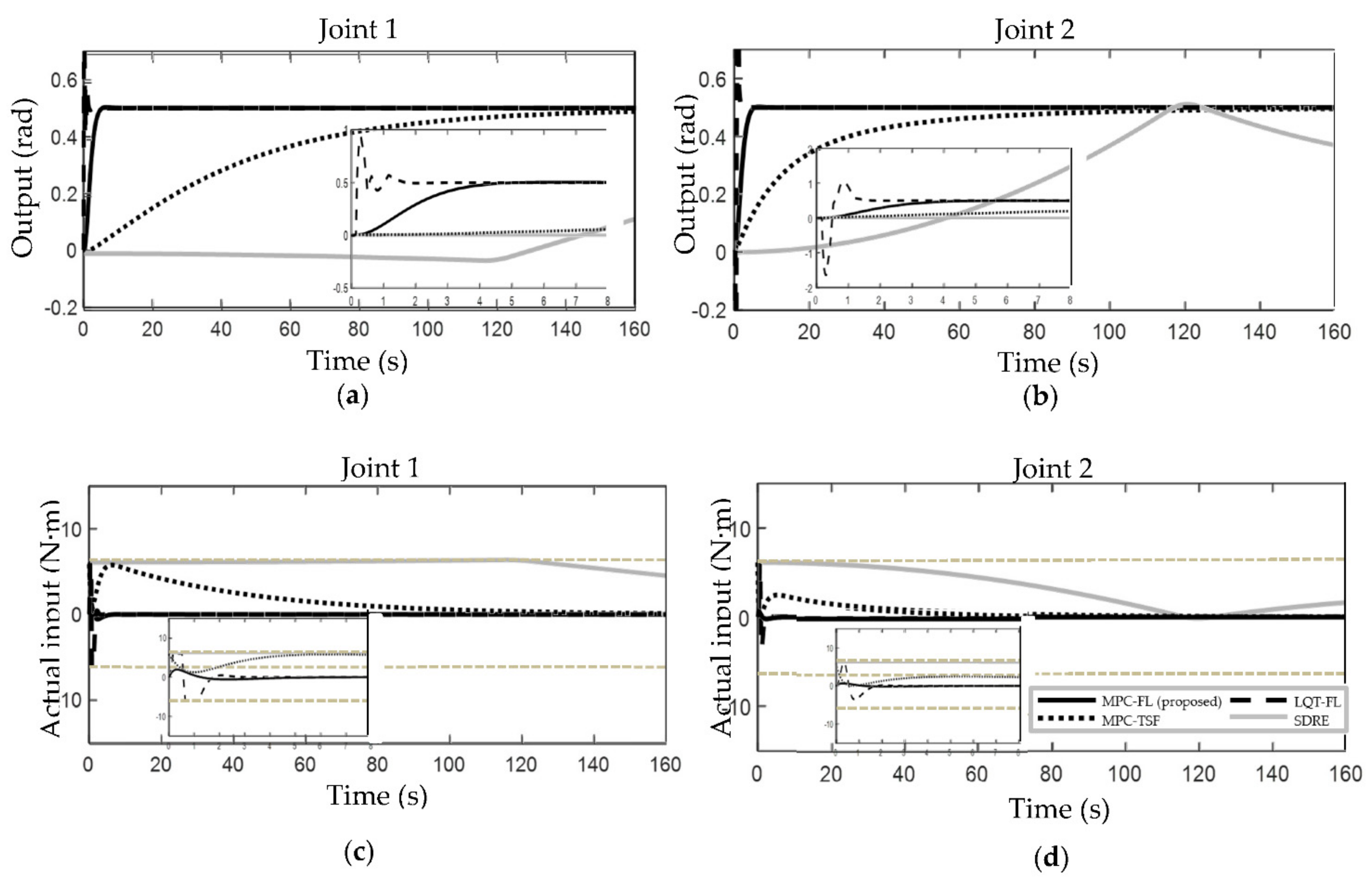
Section 4 demonstrates two examples, the SISO and MIMO systems.
Section 5 summarizes significant findings.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












