This section will introduce the method of extracting featured lane change data from NGSIM, the principal component analysis method for data analysis and modeling for this investigation, and the test method to judge the validity of the model.
3.1. Identification Method of Lane Change Trajectory Data
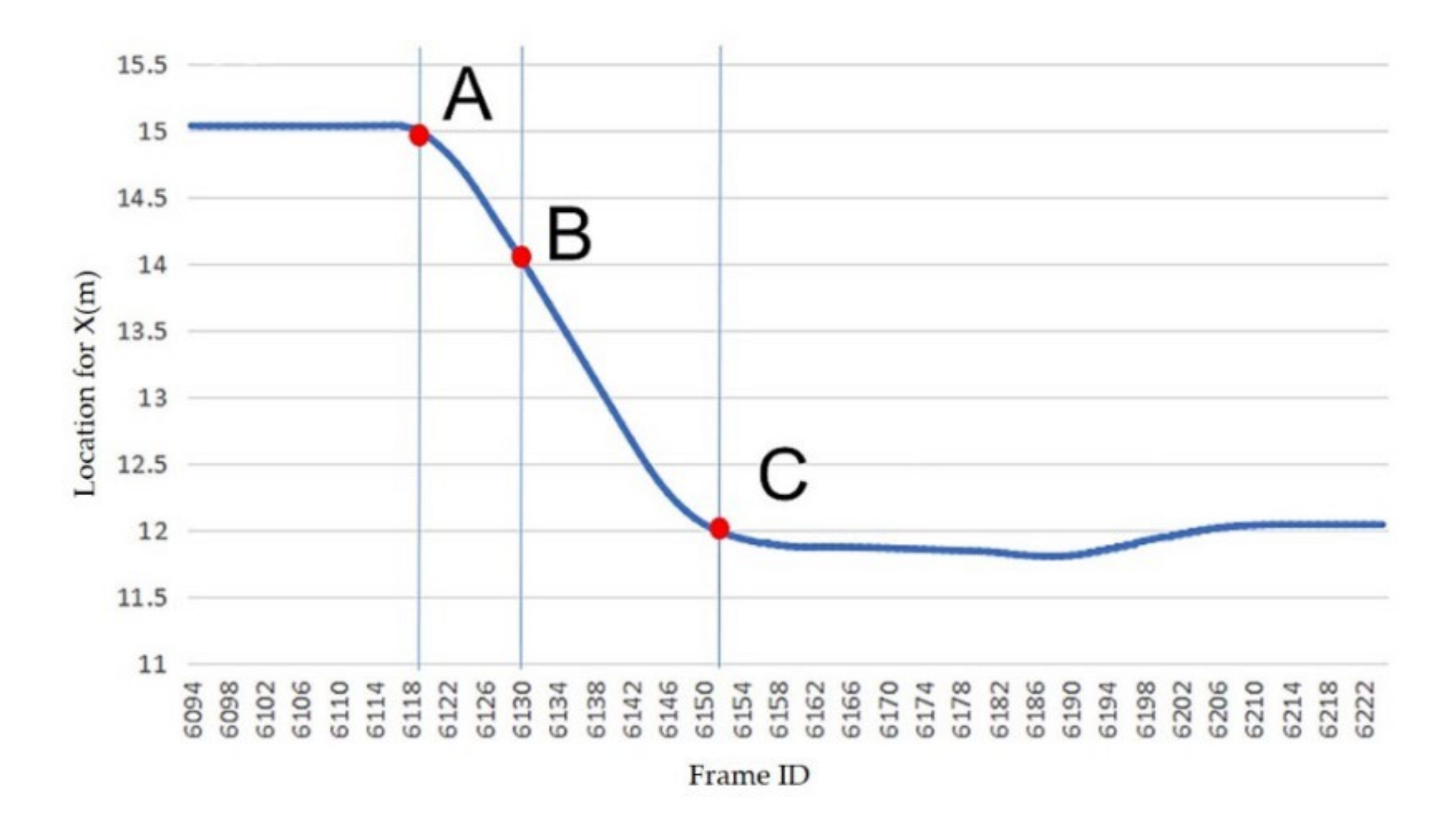
Vehicle operation trajectories are drawn according to the trajectory data set, and the entire lane-changing process of the vehicle is realized by marking the three crucial time nodes during the lane-changing process. The first time node, which belongs to the end of the lane change preparation stage and the start of the lane change execution stage, is the moment when the
x coordinate of the vehicle changes greatly and is marked as A; the second time node, which is the end of the lane change execution stage and the start of the lane change adjustment stage, is the occurrence of the change in the ID of the lane where the driving vehicle is located and is denoted as B; the third time node, which is the end of the lane change adjustment stage, is the moment when the x coordinate of the driving vehicle tends to be stable and is denoted as C.
Figure 2 is a schematic diagram of different stages and time nodes of the lane-changing procedure.
The three time points shown in
Figure 2 divide the lane-changing behavior of vehicles into three phases. It is important to master the data characteristics of different phases. Here, MATLAB software (MATLAB version: 9.8.0.1323502 (R2020a); Creator: MathWorks; Location: America) is used to extract and process the trajectory data in the following steps.
Step 1: Extract all vehicle IDs that only change lanes once and store the trajectory data.
Step 2: Take the lane ID as the unit, store the trajectory data of the same vehicle before and after the lane-changing behavior, and record the last vehicle information after the lane-changing behavior as point B. Point B is at the end of the execution stage and the start point of the adjustment stage.
Step 3: Determine the end point of the lane change preparation stage, and record the end point as point A. The time period before A belongs to the lane change preparation stage, and the time period between A and B belongs to the lane change execution stage.
Step 4: Determine the end points of the lane change adjustment stage, and record the end point as point C. The time period between B and C belongs to the lane change adjustment stage.
After the time nodes at different stages of the vehicle lane-changing behavior are calibrated through the above identification steps, the corresponding lane-changing data can be extracted to provide a basic data set for research on lane-changing behavior.
3.2. Principal Component Analysis
Principal component analysis (PCA) is a classic statistical method. Through orthogonal transformation, a set of potentially correlated variables is transformed into a set of linearly uncorrelated variables (also called principal components). In practical applications, dimensions of irrelevant variables finally constructed are often fewer than the number of original variables. Therefore, the main variables with greater influence can be extracted and the complexity of the data would be simplified. Each variable is searched one by one and perform orthogonal transformation. Principal components are several larger variables obtained by orthogonal transformation, which are linear combinations of the original variables.
The study involves three stages (preparation stage, execution stage, and adjustment stage) in the lane-changing process, involving a total of n variables (vehicle speed, acceleration, distance, time distance, etc., in each stage), to establish a linear model of the longitudinal travel distance of the lane-changing behavior and the interrelated effects of variables. Because the variables may be correlated with each other, it is necessary to construct orthogonal variables to eliminate the correlation between them.
Firstly, raw data should be centered, which means unitedly adjusting the mean values to be 0. The original observed vehicle data have
t different dimensional representations. The data for each
xi of the characteristic variables
Xi have means of
μi, which are obviously not all 0. To facilitate data dimensionality reduction and the use of variance to construct principal components, the data centering procedure adjust all the original sample data means to 0 to simplify the calculation of variance values. The variances of independent variables
Xi are calculated by the following equation:
With the method, mean value of each variable
μi = 0, the variance is:
This process is also the first step in finding the orthogonal basis: searching for the first base such that the variance value is maximized after transforming all data into the coordinate representation under the base.
Secondly, a covariance matrix needs to be constructed to characterize the degree of correlation between the two variables
A,
B in terms of covariance. After data centralization, the covariance formula is simplified:
Although the average coefficient of the unbiased mean and variance of the sample is 1/(
n − 1), 1/
n can be used to facilitate the calculation when the number of samples is large. After the orthogonal transformation of any two independent variables, the covariance of the two variables would be 0, which means no linear correlation after the procedure. Next, covariance matrices must be constructed for the two variables
ai,
bi and the arrangement of these two variables are represented with the matrix
X:
The corresponding scatter matrix is
XXT, and the covariance matrix is (
1/
n)
XXT:
In order to orthogonalize any two variables, the covariance matrix should have 0 elements other than the diagonal positions, which means
Cov(
A,
B) = 0. Therefore, the covariance matrix is diagonalized, which is the process of the eigenvalue decomposition. Based on the eigenvalue and eigenvector properties of the matrix, the following relationship equation is obtained:
The set of vectors is orthogonalized to obtain a set of unit vectors, and the matrix
T is decomposed into the product of the diagonal matrix and the matrix of eigenvectors:
where Σ is the diagonal matrix of eigenvalues
λi arranged by size and
Q is the matrix of corresponding eigenvectors
.
In general, for a matrix that is not square,
Tm*n, the singular value decomposition method can be used:
where the matrices
Um*m and
Vn*n are orthogonal matrices and Σ
m*n is a matrix with all elements except the main diagonal element being singular.
Finally, to construct irrelevant variables and the representation of changes, use a matrix approach:
where
X is the original data representation and vector
F is the new data representation.
Among the functions, i = 1, 2, …, m, represents the ith mutually orthogonal basis and j = 1, 2, …, n, represents the original data and their dimensions are t. The next steps are to sort according to the corresponding eigenvalues, select according to the principle that the contribution rate needs to reach more than 85%, and obtain the final orthogonal variables for analysis, where m is the first m principal components selected.
After the PCA procedure, the principal component regression equation is required to be constructed according to the results. In the research,
m characteristic indicators of the vehicle during the three steps of the lane-changing process are considered. When handling its correlation, a linear model is adopted to express this, which is represented by:
where
H indicates the longitudinal driving distance of the lane-changing process,
xi indicates the influencing variables in the lane-changing process, and c
i indicates the weight of each variable. After the principal component analysis, the principal component regression equation for the longitudinal driving distance was constructed according to the percentage of the contribution of the principal components:









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}