1. Introduction
Guyed masts are extensively used in the telecommunications industry, and the size, shape, and topology optimization can significantly benefit their transportation and installation. The main loads acting on guyed mast structures arise from wind [
1,
2], earthquakes [
3,
4,
5,
6], sudden rupture of guys [
7], galloping of guys [
8], and sudden ice shedding from ice-laden guy wires [
9].
Their optimization must fulfil several requirements under ultimate and service limit states [
10]. Specifically, service limit states are crucial for guyed mast structures due to high-amplitude oscillations caused by their high deformability. In some cases, these vibrations have led to a signal loss caused by excessive displacement and rotation of the antennas and, in other cases, have resulted in permanent deformation or failure. Therefore, size optimization of the guyed mast structure represents a challenging task since the increment of the performance ratio of the materials should be counterbalanced by an adequate lateral stiffness to reduce high-vibration drawbacks [
11].
Saxena [
12] reported several happenings where heavy icing combined with moderate wind resulted in severe misalignment of towers and complete failure. Novak et al. [
13] showed that ice accumulation on some parts of the guy wires and moderate winds could lead to the guy galloping, resulting in unacceptable stress levels throughout the structure. The main topics investigated in the field of guyed structures can be summarized as follows:
Structural design. Several researchers investigated the dynamic response of guyed mast structures through experimental tests and numerical modeling to derive design approaches and recommendations [
14,
15,
16]. In particular, there are studies dealing with the dynamic identification and accurate estimate of the wind loads [
17,
18,
19,
20,
21].
Nonlinear dynamics. The proneness to global and local instabilities challenged several scholars to estimate and predict the nonlinear behaviour of guyed masts [
22,
23,
24,
25,
26].
Structural optimization. The need for guyed structures that are easy to install and transport challenged several scholars to optimize their shape in order to reduce the structural mass without reducing the lateral stiffness and prevent instability phenomena [
27].
Structural control. There are some attempts of control methods to reduce vibrations in mast-like structures [
28,
29,
30]. Among others, Blachowski [
31] proposed the use of a hydraulic actuator to control cable forces in guyed masts using Kalman filtering.
This paper tackles the size and shape optimization of guyed mast structures. A video of the considered structure is available in
Supplementary Material. Since the first attempts by Bell and Brown [
32], many engineers attempted to optimize guyed masts under wind loads using deterministic global optimization algorithms. However, as pointed out by [
27], this approach leads to local optimum points, since each design variable was considered separately. Thornton et al. [
33] and Uys et al. [
34] proposed general procedures for optimizing steel towers under dynamic loads. To the author’s knowledge, Venanzi and Materazzi [
35] were the first to implement a multi-objective optimization method for guyed mast structures under wind loads using the stochastic simulated annealing algorithm for size optimization. The objective function implemented by [
35] included the sum of the squares of the nodal displacements and the in-plan width of the structure. Zhang and Li [
36] attempted to achieve both shape and size optimization in a two-step procedure using the ant colony algorithm (ACA). Cucuzza et al. [
37] proposed an alternative approach in which the multi-objective optimization problem has been reduced to a single-objective problem through suitable parameters. Luh and Lin [
38] were challenged in achieving the topology, size, and shape optimization of guyed masts using a modification of the binary particle swarm optimization (PSO) and the attractive and repulsive particle swarm optimization.
This paper discusses the size optimization of guyed masts using a genetic algorithm (GA) by considering different design scenarios (e.g., Cucuzza et al. [
37] and Manuello et al. [
39]). Kaveh and Talatahari [
40] noticed that the particle swarm optimization (PSO) is more effective than ACA and the harmony search scheme for optimizing truss structures. However, Deng et al. [
41] and Guo and Li [
42] were successful in optimizing tapered masts and transmission towers using modifications of genetic algorithms (GA). Moreover, Belevivcius et al. [
27] attempted the topology-sizing optimization problem of the guyed mast as a single-level single-objective global optimization problem using GAs.
Therefore, given the numerous successful solutions of guyed masts using GAs, the authors chose to investigate the size optimization of a guyed mast structure using GAs. Following [
35], this paper focuses on the size optimization by considering eight possible design scenarios. The purpose of the present paper is two-fold. Firstly, this work aims at achieving a size optimization on a real application case adopting structural verification according to Eurocode 3. During the load evaluation phase, detailed analyses have been conducted, including wind, ice, and seismic actions and the verifications against instabilities. Secondly, the computational intelligence procedure adopted by the authors allowed the investigation of several scenarios simultaneously. As a result, the parameters that mainly affected the design process have been detected to provide preliminary indications to engineers in the practical design of similar structural typologies. Furthermore, the considered case study may represent a benchmark case for validating the reliability and accuracy of alternative numerical approaches. Therefore, the paper is organized as follows. After the case study description and the FE model, the authors introduce the first numerical results and the outcomes of the size and shape optimization.
2. Case Study
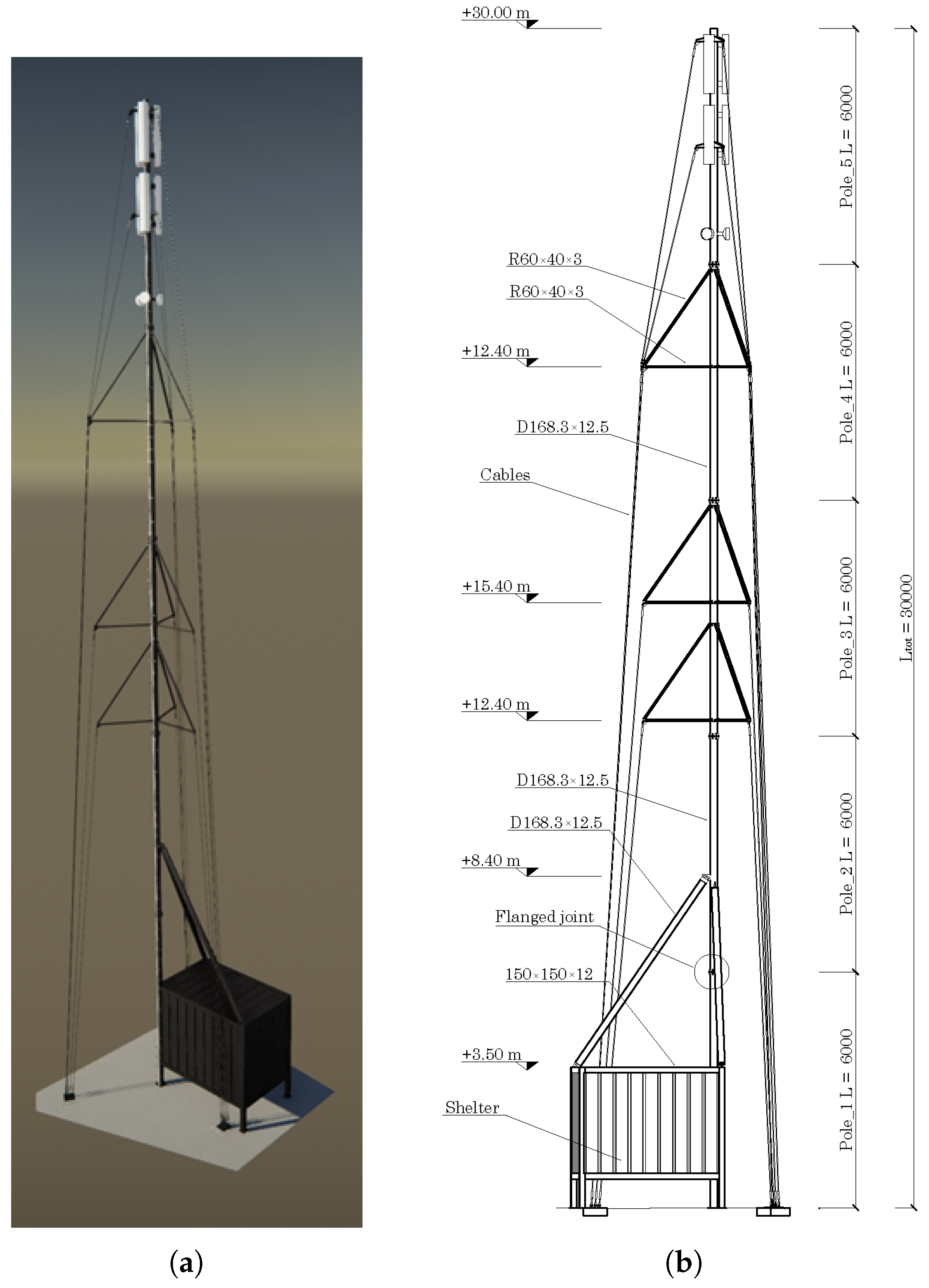
The considered structure is a guyed radio mast. It is a thin, slender, vertical structure sustained by tension cables fixed to the ground and typically arranged at 120° between each other.
The main body is a single central column made of tube profiles or truss systems when a high elevation must be reached, see
Figure 1. More than one set of cables is placed at different elevations to prevent instability phenomena. Guyed towers are usually built for meteorological purposes or to support radio antennas, such as the one considered in this research. In particular, this structure can be used for a limited time during an event or maintenance of primary transmission towers. Therefore, it is also called a temporary base transceiver station (BTS), typically adopted to supply the immediate service. Sporting events, concerts, motor racing, military camps, and emergency events are typical examples of temporary BTS applications. The BTS is usually mounted on a moveable platform called the shelter.
The considered structure is located in Bassano Del Grappa, in the north of Italy, at a 129 m elevation from the sea level. The surrounding area is low-urbanized, with no relevant obstacles to the wind loads. The total height of the mast is 30.00 m. It is sustained by a central pole where 21 cables are fixed, see
Figure 2. Other structural elements with rectangular cross-sections are used to create truss systems connecting cables and the central pole.
The central pole consists of five circular hollow steel profiles with flanged joints and 6 m in length. All connections are bolted, as well as those connecting the cables to the pole. The shelter is a steel box devoted to partially sustaining the structure and hosting electronic equipment. It is usually mounted on a moveable platform.
4. Finite Element Modeling
The structural model was developed using two different element types: beams and cables. Beam elements model the main pole and all structural elements except for the cables. They possess the geometric and material properties of structural elements. The beam elements are used to model the main pole and secondary elements. Moreover, except for the main pole, rotation releases are applied at the ends in order to consider no flexural rigidity, as occurring for trussed structures.
Cable elements are used to simulate the steel ropes. Cable elements undergo large displacements that give rise to geometric nonlinearities. Therefore, the equilibrium of the cables is considered in the deformed configuration using SAP2000. As a result, the structural behaviour of guyed towers can be highly nonlinear, especially for low pre-tension cables, which are prone to large displacements. On the contrary, the nonlinear behaviour becomes less pronounced by increasing the pre-tension, resulting in high compression levels and minor instability effects. This paper considers the envelope of the maximum and minimum responses associated with each load condition.
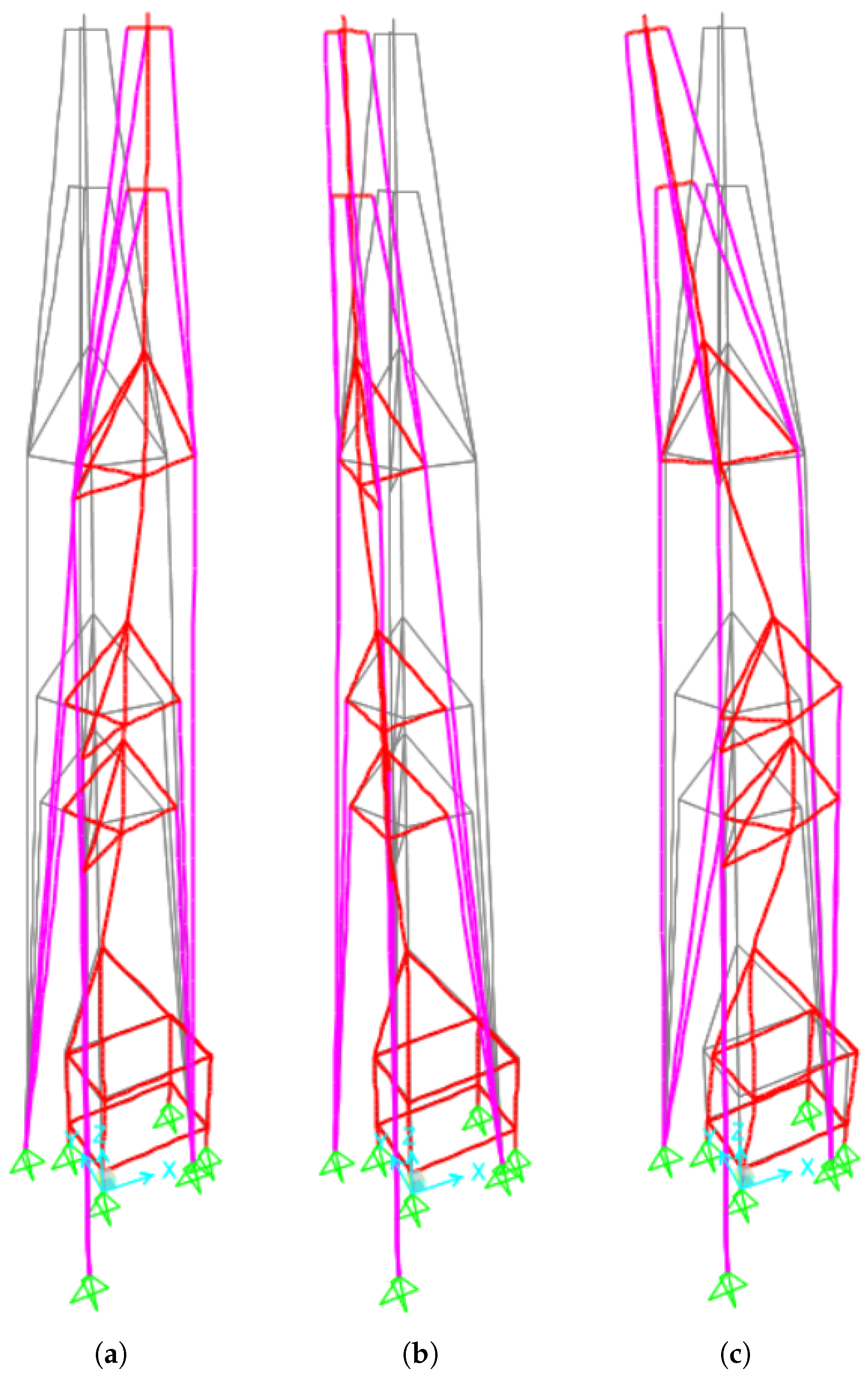
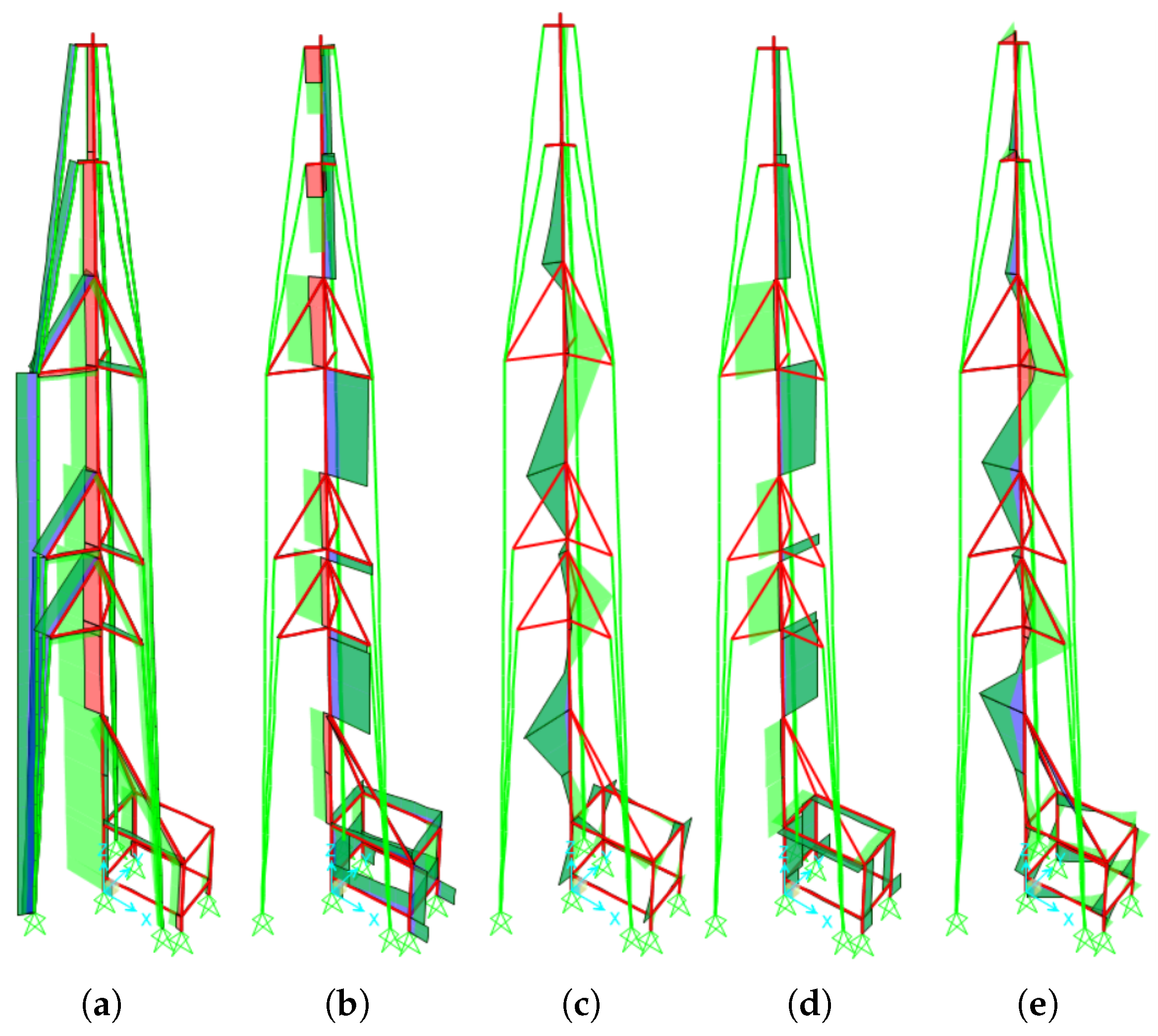
Figure 5 plots the three modes with a higher mass participation ratio. These are the 10th, 11th, and 12th modes obtained from the dynamic analysis of the mast structure with the dead loads. On the contrary, the first modes arising from the dynamic analysis have lower mass participation factors and are characterized by local deformation of the structural elements. The 10th, 11th, and 12th modes are the first modes exhibiting the global deformation of the mast structure.
X and Y identify the in-plane orthogonal directions. The 10th and 11th modes have an approximate 26% mass participation factor in the Y and X directions, respectively. The natural period is very low and at approximately 0.4 s. The 13th mode is mainly torsional with nearly a 7 and 4% mass participation factor in the X and Y directions.
Figure 6 shows the positive (in dark green and purple) and negative (in red and light green) maximum and minimum envelopes of the axial, shear forces, and bending moments acting on the structural elements.
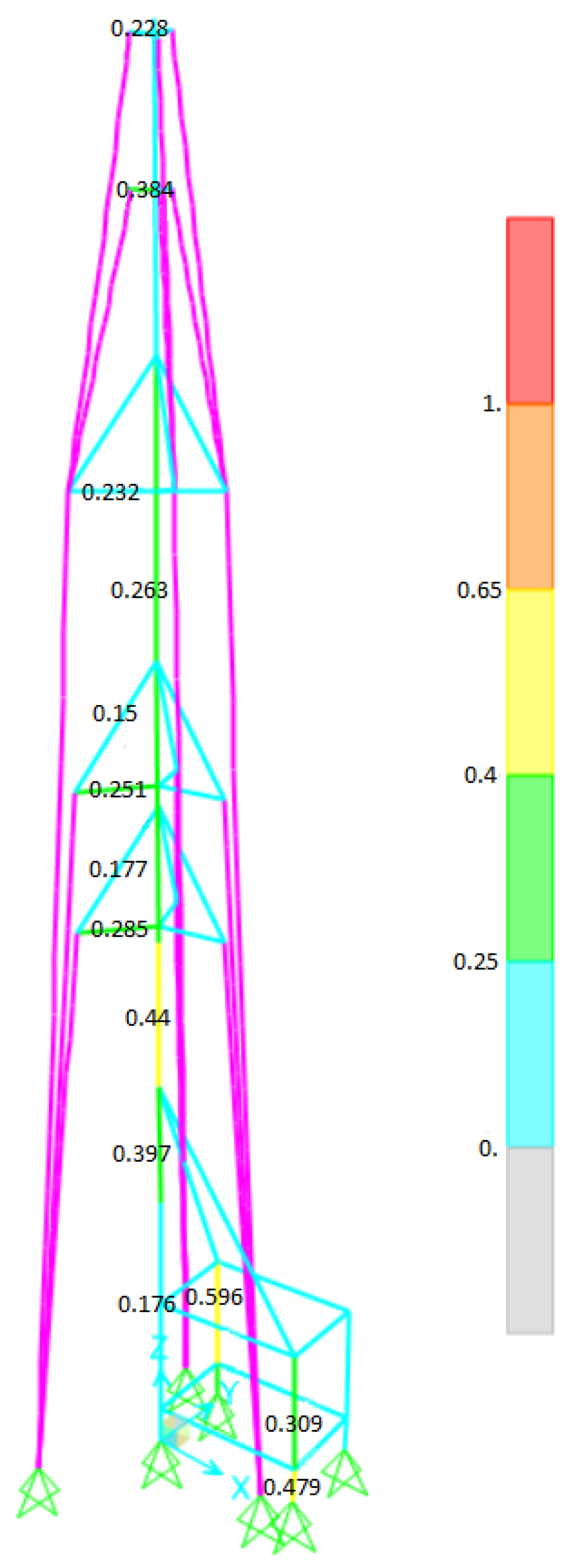
Figure 7 plots the performance ratios of all structural elements except for the cables. The performance ratio is the ratio between the maximum stress in the structural element and the yielding stress. The performance ratios are defined by the colour map next to
Figure 7. The plots highlight the presence of a structural element in the first half of the central pole with a high-performance ratio, depicted in yellow. The first section of the central pole has a low performance ratio, lower than 0.25. After the section with a performance ratio in the range 0.4–0.65, the following sections fall in the range 0.25–0.4 and are coloured in green. The top sections of the central pole are not significantly stressed, with a performance ratio of 0–0.25. The bracings have low stress, plotted in cyan, with performance ratios of 0–0.25.
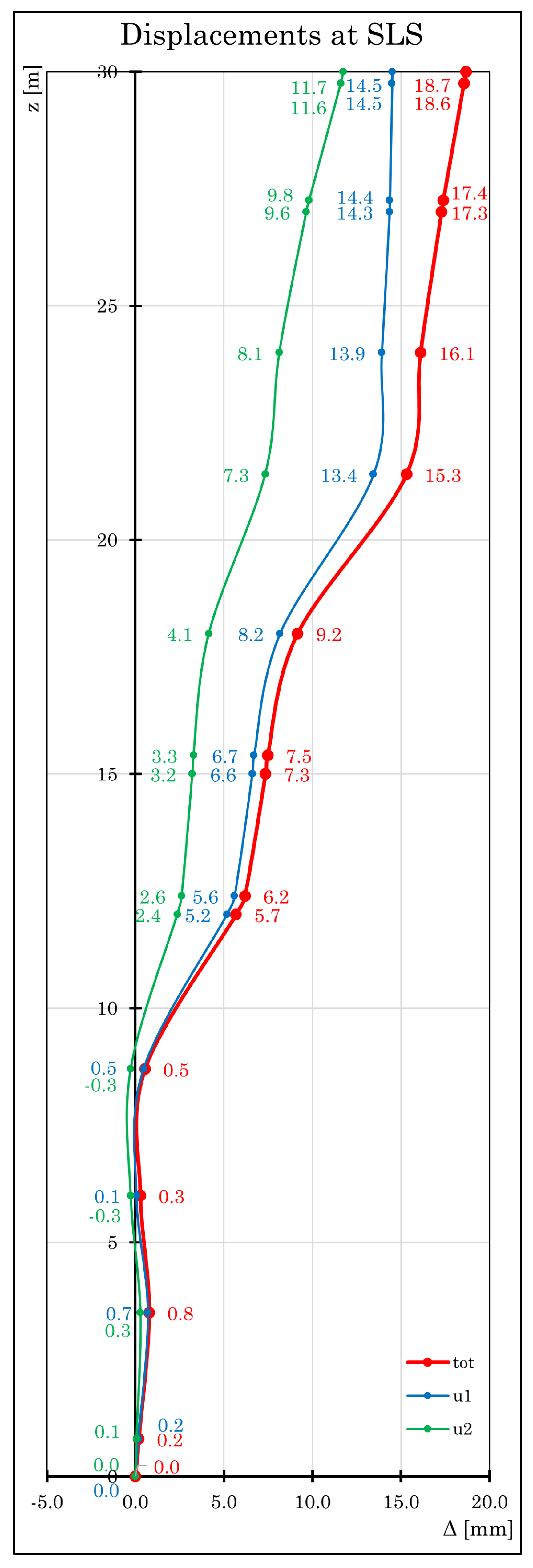
Figure 8 shows the maximum displacements in the X (
), Y (
) directions and their combination (
) at the service limit state. The maximum displacement is located at the top of the tower, in particular at joint 6 (z = 30.00 m), with a maximum displacement equal to
= 18.7 mm.
5. Structural Optimization
In optimization problems, the main goal is to find the best conditions in terms of the optimal set of design parameters collected in the design vector
, which minimizes an objective function (OF)
[
45,
46,
47]. These problems can be categorized into single-objective or multi-objective based on the number of OFs involved, and a further classification is based on the presence (or not) of constraints [
48,
49,
50]. In the structural optimization field, it is common to deal with constrained optimization, whose general statement is [
51]:
where
is the design vector to be optimized, whose terms are limited into a hyper-rectangular multidimensional box-type search space domain of interest denoted as
, given by the Cartesian product of the range of interest of each
j-th of each design variable bounded in
,
. The term
in (
4) denotes inequality constraints whereas
are equality ones, which further reduce the feasible search space inside
. In structural optimization, it is typical to deal with inequality constraints, and a common goal is to minimize the global cost of the structure. Since this involves many terms, the main attempt is minimizing the self-weight of the structure, indirectly connected to material cost, i.e., material usage and natural resources consumption [
51]. Several strategies have been developed over the years to handle constraints [
52,
53,
54]. In the present work, the penalty function-based approach was implemented due to its simplicity, allowing converting the problem with OF
into a new unconstrained version
:
where
is the penalty function. Adopting a static-penalty strategy,
, assume this form [
55,
56]
where
is the number of violated constraints and
is the sum of all violations:
and
are the violation control parameters, whose numerical values are assumed equal to
following [
55].
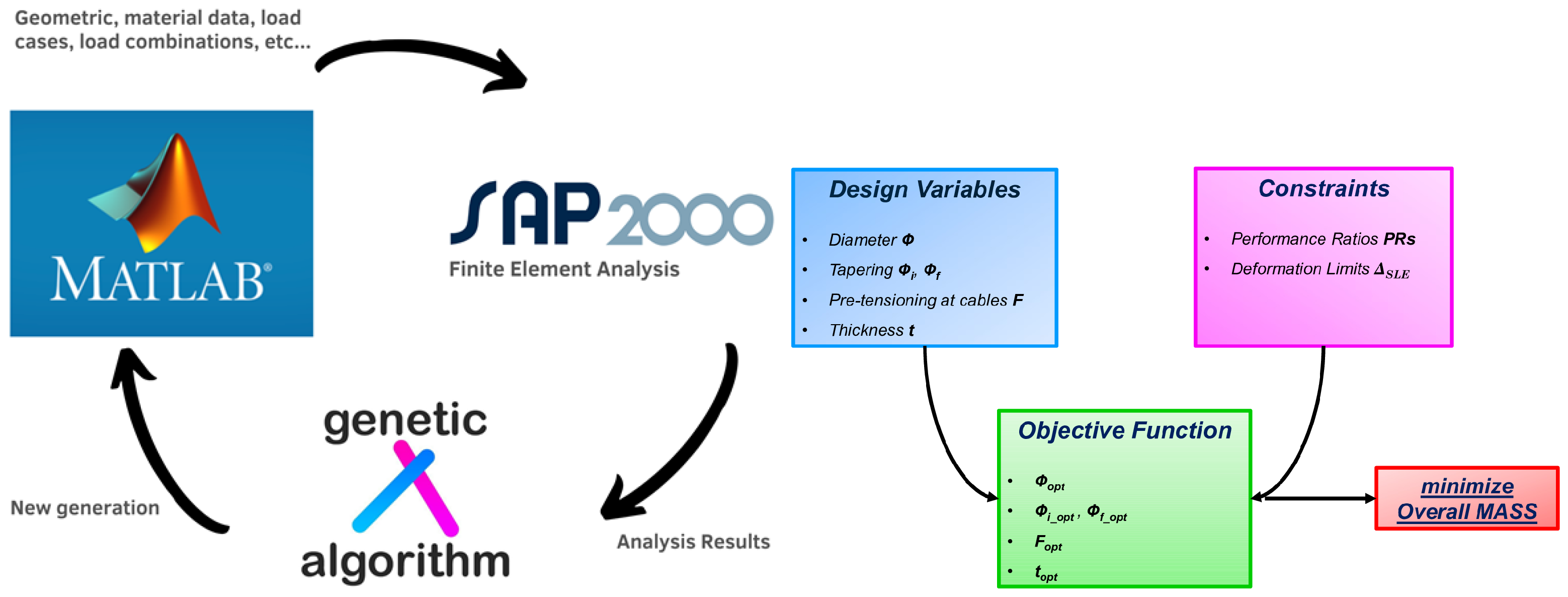
In the current study, the authors carried out a parametric study on the design variables of the guyed mast. This fact has led to eight different scenarios, summarized in
Table 5. In addition, the starting initial values of the design parameter are listed in
Table 6, while the general optimization workflow is illustrated in
Figure 9. To compare the results, the focus is related only to the performance ratios PR of the central pole of the guyed radio mast, being the pole the most stressed element. It consists of five segments 6.00 m long with the same cross-section. Thus, starting from the ground level:
Pole (0.00 to 6.00 m);
Pole (6.00 to 12.00 m);
Pole (12.00 to 18.00 m);
Pole (18.00 to 24.00 m);
Pole (24.00 to 30.00 m).
Starting with a constant diameter of the cross-section for the pole, at the end of the optimization, it is advisable to find a tapered solution following a linear relationship with the height, as represented in
Figure 10f. Accordingly, it is possible to shape the pole cross-section with two design variables described by the bottom
and top
diameters. In the following, the different scenarios obtained from the parametric study based on the design variables involved in the optimization problem are described:
Scenario A: this scenario involves the diameter
, as a sole variable, in the attempt to reduce the material consumption with a constant pole cross-section diameter with the height, as illustrated in
Figure 10a.
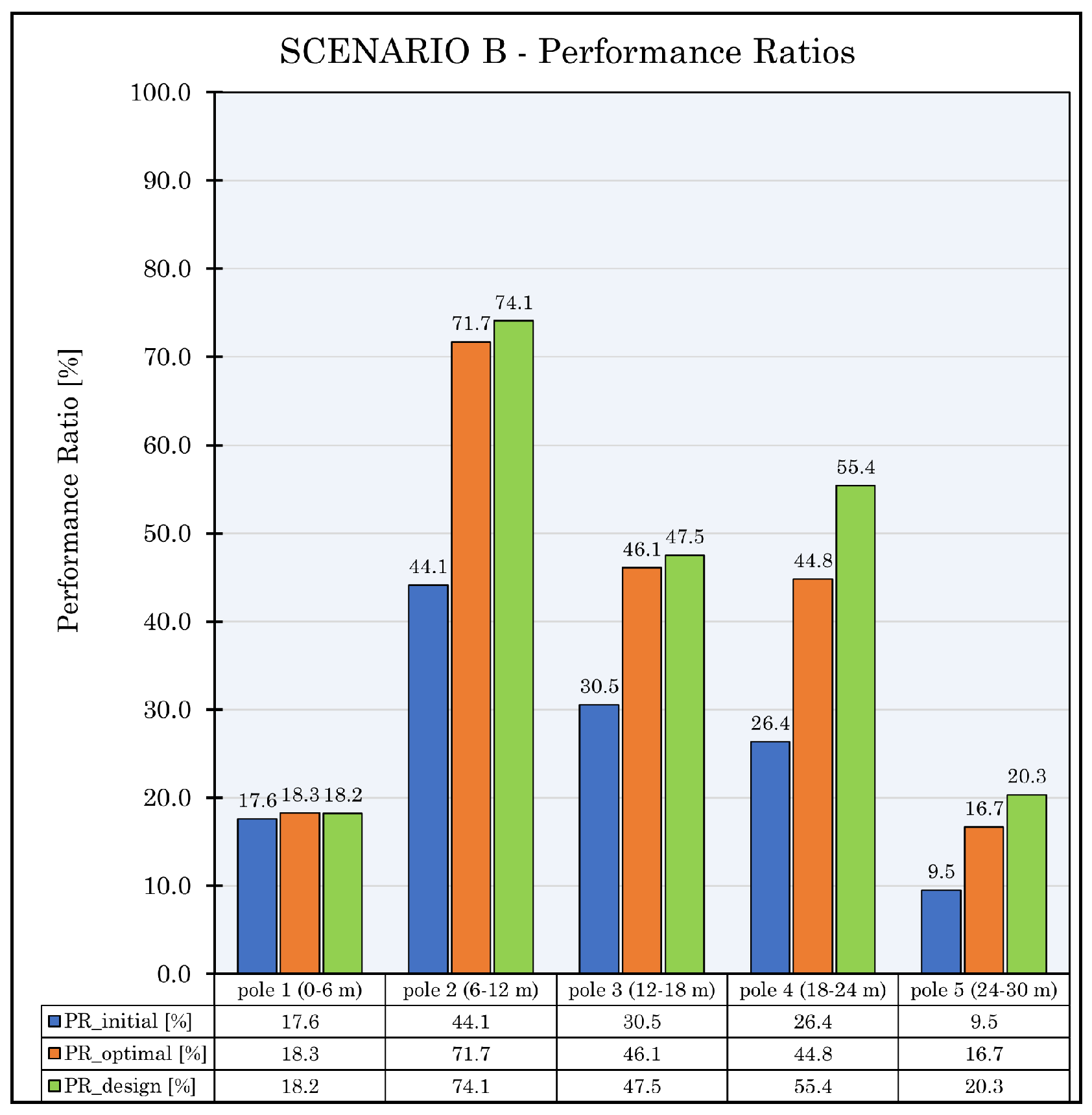
Scenario B: this scenario attempts to refine the previous case by adopting a tapered solution for the pole, by using the bottom
and the top
diameters, as represented in
Figure 10b.
Scenario C: further improvements are considered concerning scenario B by adding the cable pre-stressing force
F as a variable of the optimization, as represented in
Figure 10c.
Scenario D: further improvements are considered to scenario B by using a unique value for the pole thickness
t of the tapered elements of the pole, as represented in
Figure 10c.
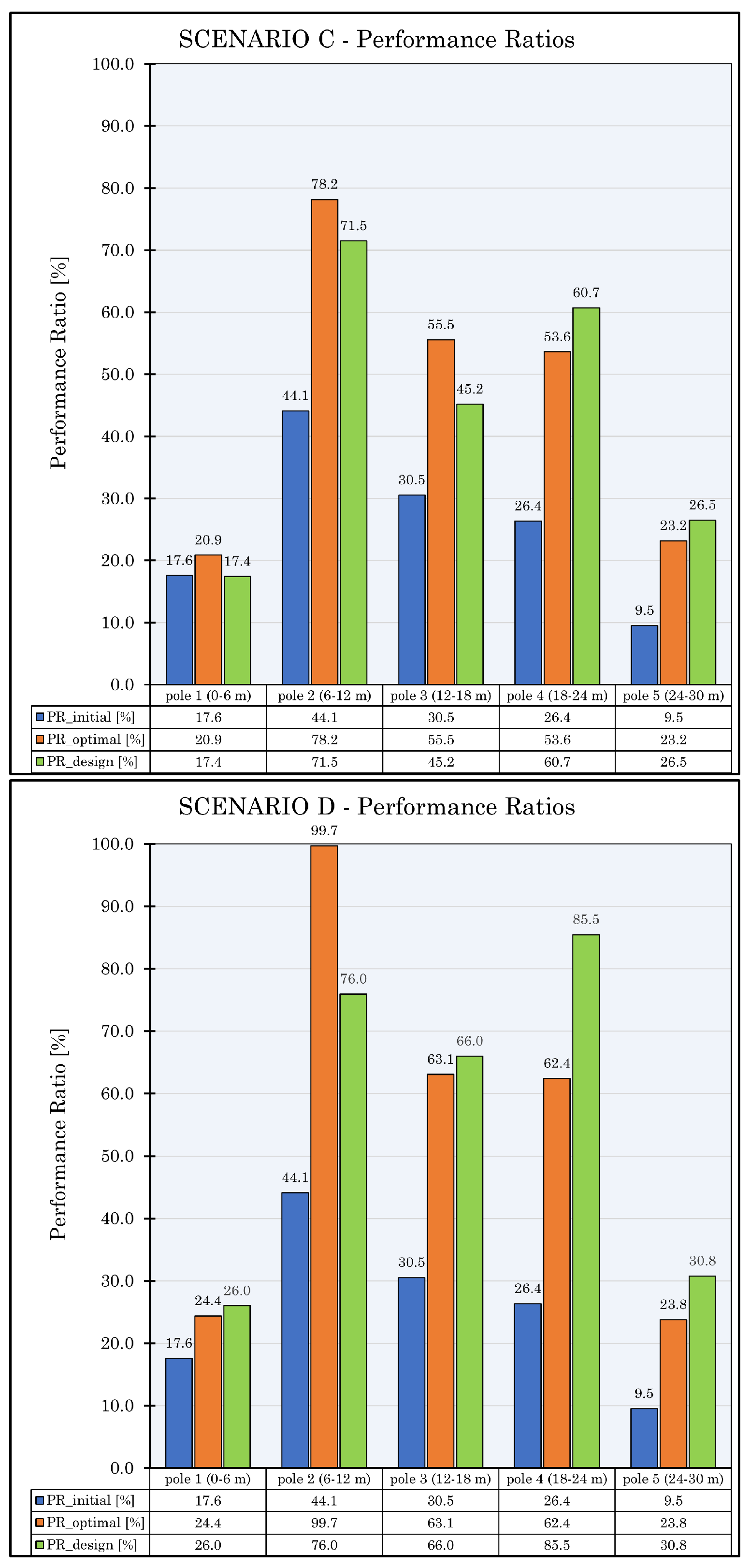
Scenario E: further improvements are considered with respect to scenario B by optimizing both cable pre-stressing force
F with a unique value of thickness
t for the tapered elements of the pole, as represented in
Figure 10e.
Scenario F: from the structural analysis of scenario E, it is possible to point out how the linear law for the tapering forces to use a larger section where it is not necessary. Elements 2 and 3 are the most stressed ones. Therefore it is possible to further refine scenario E by considering a thickness value for the intermediate pole elements and a different thickness for the other extremal pole elements .
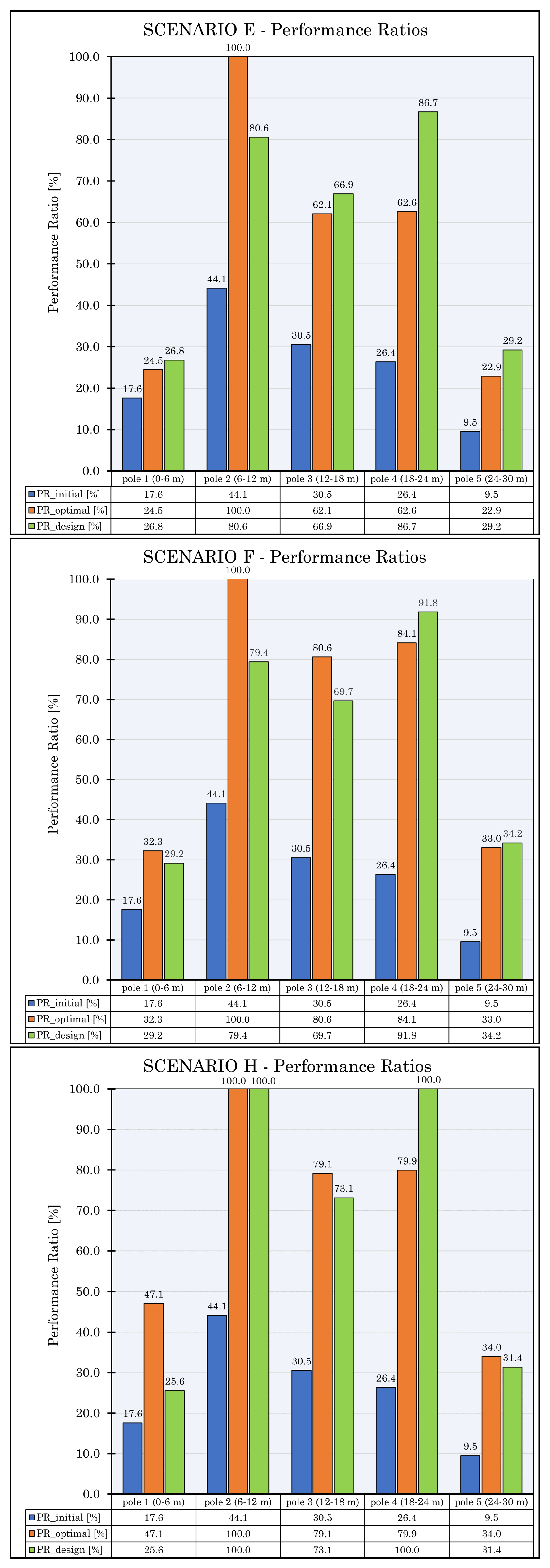
Scenario G: in this scenario, the five different thickness values only have been governed for every pole element
for a constant diameter solution with height, as depicted in
Figure 10f.
Scenario H: in this last scenario, a complete approach involves both the tapered solution by governing the initial bottom and the final top diameters, the five values of thickness for every pole element , and even the cable pre-stressing force.
Constraints Involved in the Structural Optimization Problem
The optimization problem statement is reported in (
4) and the constraints were treated with the penalty-based approach illustrated in (
5), by converting the constrained problem into an equivalent unconstrained one. The resolution of the optimization task considers the structural design assessment required by national and international codes to ensure the safety of constructions. In particular, the structural verifications derive from Eurocode 3 (EN 1993-1-1: 2005) and are referred to the ultimate limit state (ULS). The design verifications include tensile, compression, and buckling verification, and a combined assessment, such as the interaction capacity according to Annex B of the Eurocode 3:
where
D stands for the demand and
C stands for the capacity of the structure. Specifically,
is the acting axial force, whereas
and
represent the acting bending moments in the two principal directions of a planar local reference system centered on the cross section center of gravity.
A is the cross section area of the pole,
and
are the plastic section modulus in the two principal directions,
is the yielding strength of the steel, whereas
is the partial safety factor for instability conditions, equal to 1.05 from the Italian National Annex.
is the reduction factor for lateral–torsional buckling, whereas
,
,
, and
are interaction factors whose values are derived according to two alternative approaches based on Annex A (method 1)and Annex B (method 2). The global structural deformation referred to the service limit state (SLS) has also been considered by verifying the top displacement of the mast. Specific recommendations for guyed mast structures are missing in national and international codes. Therefore, the authors adopted the suggestions defined in the Italian Technical Code NTC2018 (D.M.17/01/2018) reported in Chapter 4.2.4.2.2 Table 4.2.XIII related to limitations of lateral displacements of steel multi-storey frame structures. These limitations express a threshold condition in terms of the total height of the structure
H:
Since this condition is specific for steel multi-storey frame structures, the authors will assume this value as a reasonable choice to ensure service life assessment and preservation of working conditions of the telecommunication guyed mast tower. In the next section, a discussion on the results is carried out.
6. Results and Discussion
The paper compares the outcomes of the size and shape optimization in eight different scenarios, distinguished by different design variables. Scenario A is associated with the worst improvement of the structural performance since a single diameter is used for the central pole. Additionally, industrial steel profiles do not cover all possible ranges of the diameter. Improvements in the structural performance and weight reduction are achieved in the following scenarios when the search space becomes larger by increasing the number of design variables.
Scenario B introduces the tapering of the central pole with a linear variation from the bottom to the top. In this case, the optimal solution is affected by intermediate sections, which are more stressed. Consequently, the end cross-sections are over-estimated. In response to that, Scenario F introduces the linear tapering of the tube thickness , to enhance the performance of the optimal solution. Parallelly, in Scenario G, five different thicknesses are adopted (, , , , ), and the results are analogue to case F. Therefore, the thickness of the steel members is a suitable optimization parameter. At the same time, the diameter alone is not capable of returning attractive solutions because a linear interpolation trend is used. In addition, lower and upper limits were imposed for d and t. In particular, for this kind of structure, a minimum diameter 100 mm and a minimum thickness mm was imposed.
The cross-section area depends on the square of the thickness. Therefore, small changes in
t significantly affect the resulting area. Conversely, if the diameter is the sole search space, despite being tapered linearly with height, even significant modifications may not produce notable improvements. Still, the increment of design variables involved in the structural optimization typically increases the computational efforts. However, the scenario with the highest number of variables was characterized by an average time iteration close to 18s, using a computer with average performance. The computational effort cost of the optimization procedure strongly depends on the machine performance, no convergence issues occur.
Table 7 lists the average values of performance ratio obtained from the eight optimization scenarios. All scenarios were collected in terms of number of parameters involved during the analysis.
Table 7 proves that the increment in the number of design variables is associated with higher performance ratios. The target of the optimization achieves the best weight reduction, fully exploiting the structural material, without exceeding the ultimate and service limit states.
Table 7 lists three sets of performance ratios: the initial one before optimization, the optimized, and the one obtained using commercial steel profiles, called the design performance ratio. The averaged performance ratio is equal to 28% before optimization. It significantly increases from scenario A, nearly 45%, to scenario G with 68%.
Essentially related to PR, mass reduction gives an idea about how much lighter (or heavier) the structure becomes due to the optimization process. It directly provides an estimate of cost savings.
Therefore, the results in
Table 8 are consistent with the ones in terms of performance ratios, shown in
Table 7.
Figure 11 shows the optimization results for the Scenario G, in term of the performance ratio obtained by averaging the performance ratios for each structural element. The results for all scenarios are reported in
Appendix A. Scenario G, depicted below, exhibits higher values of the performance ratios. This fact becomes become more evident for poles 2, 3, and 4. In these cases, the performance ratios, associated with the design solutions, achieved values equal or greater than the optimized one due to the approximation of the design section adopted. In the post-processing phase, in fact, the optimized section chosen by the list of the FE software was manually edited since the structural constraint violation or the maximum performance ratio was not reached during to the optimization process. Moreover, in
Table 9, the optimized design section for different independent iterations and the proposed industrial solutions according to product list, provided by the software, are listed. As expected, the mass reduction achieved during the optimization process results higher than the design solution due to the approximation issue. For the proposed scenario, the iteration (
) that guarantees the best objective function is the second. In
Appendix A, the graphical (through histogram charts) and numerical representation (through tables) of the optimization result for each scenario are provided. In order to provide an overview of the objective function trend, the performance ratios and mass reduction for each scenario were collected into
Figure 12 and
Figure 13. The mentioned values were obtained for each scenario, making an average of the results, before and after optimization, independently, for each steel profile composing the central pole.
Figure 12 highlights an almost monotone increment of the performance ratios to the number of design variables. Interestingly, for a number of variables n ≥ 5, no significant improvements are achieved.
Figure 13 emphasizes an important reduction of structural mass as the design variables increase. Once again, n = 5 represents trade-off. If the number of variables exceed 5, no significant improvements are observed.
Figure 12 and
Figure 13 show a comparison between each scenario in terms of the average performance ratio and mass reduction, respectively.
Figure 12 highlights the difference with the initial state, which has an average performance ratio
= 25.6%. An evident improvement is achieved for scenarios that include the thickness t as the design variable.
In particular, from Scenarios D, E, F, G, H, the average performance ratios exceed 50%, resulting in a more than 40% difference compared to the initial state.
Figure 12 shows that the commercial profiles are sufficient to accommodate the optimized solution. An exception is noticeable in Scenario A because the optimization is performed using just one diameter
, which is optimal for a few parts of the structure, while others are “over-fitted”, resulting in a decrease of the performance ratios −28.4% and an increase of structural mass (+173 kg), as shown in
Figure 13.
Similarly, a monotonic increment of the structural mass at the end of the optimization process is evident from
Figure 13. In this case, the tonnage decreases with the increasing of the parameter’s number. There is an overall mass reduction of about −67.5% (−972 kg) from scenario D to H. In scenarios A, B, and C, the thickness t of structural members is not considered. Therefore, the mass loss is not satisfactory, at about −28.4% (−409 kg). The choice of the best scenario should depend on one of the five situations described above (from D to H) related to the better PRs gain and mass loss.
7. Conclusions
In this paper, a guyed radio mast’s size and shape optimization process was carried out to identify the equilibrium solution that guarantees the lighter optimized model, verifying strength, instability, and deformation requirements. The paper considers a detailed evaluation of the variable loads according to the Eurocodes recommendations. Furthermore, the OAPI was used to perform a structural analysis with the finite element software SAP2000 by considering the non-linearity of the cables. The optimization was carried out using a genetic optimization algorithm. Eight scenarios (labeled from A to H) were investigated, considering different arrangements of the geometric characteristics of the central pole and cables. The input parameters were increased from Scenario A to H to achieve the best fitness value of the self-weight. From Scenario A to H, the mass reduction index generally increased with the computational effort except in scenarios B and E, in which the input parameter did not represent the best vector design for the structural optimization. At this stage, the best design solution was evaluated from the database of cross-sections inside the finite element software. Though Scenario A provides the worst structural solution in terms of objective function, it represents the most convenient optimization strategy due to its low computational effort; on the contrary, Scenario H exhibits the best fitness value with the lowest self-weight, but it represents the most time-consuming solution. The best solution is achieved when the thickness values of each member, which, composed of the central pole, are included in the optimization process. An improvement of the structural behaviour against instability is observed with increasing thickness. This verification is critical for this structure, mainly subjected to normal stresses resulting from self-weight and pre-stressing cable force. The entire optimization process seems to not be sensible to the pole diameter, chosen as the input parameter of the design vector. Although the final results of the FEM analyses are based on the Italian standards, other codes (e.g., Eurocodes, American code, etc.) can be selected from the SAP2000 settings. However, since no detailed analysis was carried out and many standards are based on the semi-probabilistic approach, the final results should be similar, even with different code formulations. Nevertheless, the partial safety factors involved in load combinations remain quite the same from the numerical point of view, regardless of the followed code.
In future developments, the authors will attempt to replace circular hollow sections with built-up steel solutions to achieve the best structural performance and assemblage procedures. Especially for higher structures, guyed radio masts generally consist of a truss skeleton. Another possible development could be a structural optimization for a cable-stayed radio antenna adopting other optimization strategies, such as particle swarm optimization, PSO, and the evolution differential algorithm (EDA), which could be less time-consuming. Finally, it could perform a typological optimization by managing the position of the cable connection, trying to find the best attachment points.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















