
A Novel, Automated, and Real-Time Method for the Analysis of Non-Human Primate Behavioral Patterns Using a Depth Image Sensor

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Development of an Automated Behavioral Pattern Analysis Program
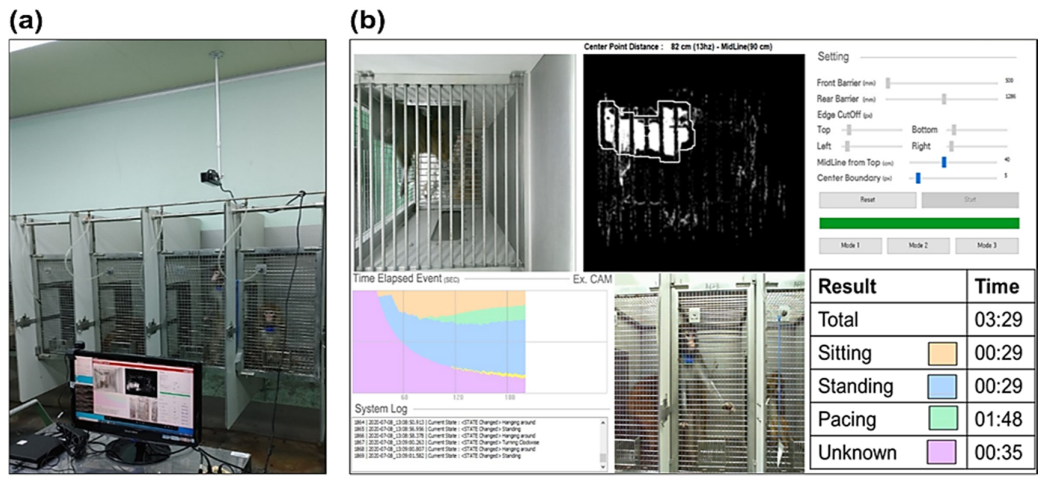
- Importing real time image frames: a camera (Microsoft Kinect V2 Window) we used for capturing motions of object has 2 types of camera module, one is a RGB images sensor for gathering ColorFrame and the other is depth sensor for acquiring DepthFrame images. Both were utilized as raw images and imported to the analysis computer in real time;
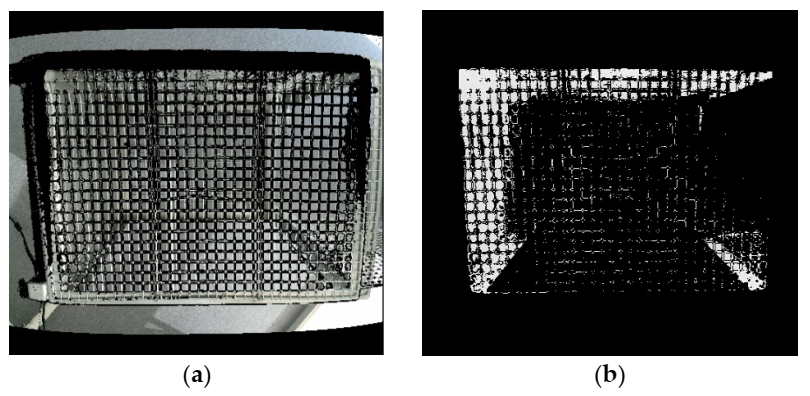
- Image mapping: the ColorFrame, obtained from RGB image sensor module, and Depth Frame from a depth sensor have different image resolutions. The MS Kinect V2 provides 1920 × 1080 resolution by RGB images and 512 × 424 resolution by depth images. For mapping two different resolution images, we merged ColorFrame with DepthFrame as Figure 1a. Both merged images and raw images from a depth camera were utilized in following steps;
- 3.
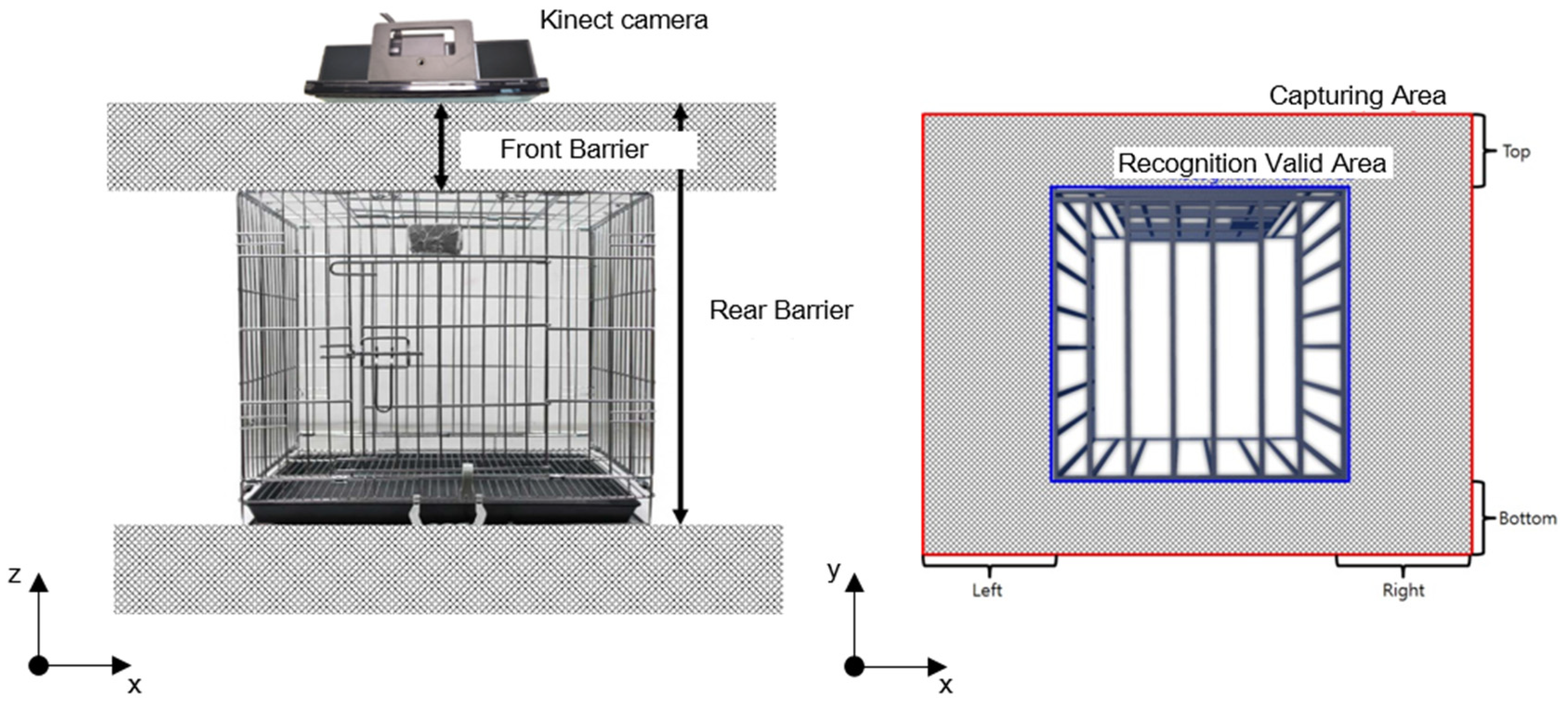
- Region of interest selection: in order to select the region of interest (ROI) inside a cage in the z direction, image data between the depth camera and the top of cage denoted as “Front Barrier” and image data below the bottom of the cage denoted as “Rear Barrier” were eliminated (Figure 2);
- 4.
- In order to select the ROI inside a cage in the z-y plane, image data outside a cage were eliminated. The removal area is shown as a grey rectangular box in which each side is denoted as “Top,” “Bottom,” “Left,” and “Right” (Figure 2). Figure 1b depicted processed images after applying step 3 and step 4 to raw images;
- 5.
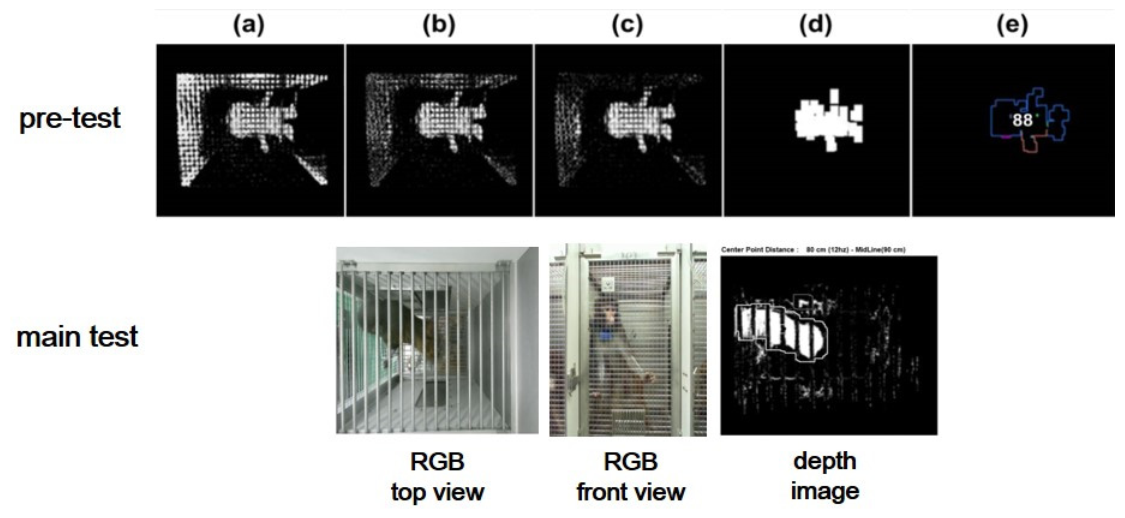
- Noise reduction: after recording 30 frames of image data, the pixels which underwent a small change equal to the specified value were removed (Figure 3a). Then, the “blur” function was used to eliminate minor noise in the image data (Figure 3b). The minor noise is defined as unnecessary pixels for object identification and disregarded for enhancing following image processing steps;
- 6.
- Background elimination: the “BackgroundSubtractorMOG2” in OpenCV was used for separating the targeted object from raw images based on Gaussian mixture method to eliminate background (Figure 3c). We can acquire a clear object image through this processing step;
- 7.
- 2nd noise reduction: any group of pixels smaller than 5-pixel size of processing image were considered as a noise and replaced by black (0 value) pixels. Then, we applied a “Morphology method” three times from “dilate” to “erode” for obtaining clear object image. The “dilate” processing converted the positive pixels into the most bright value of the image while the “erode” processing changed negative pixels to the darkest value (Figure 3d);
- 8.
- Creating contour and a center spot: the “findCountours” in OpenCV was used to create the contour of an object. After adopting contouring algorithm to the images, we were able to get a refined shape of the object. Then, we applied “Centroid Based” algorithm in Open CV for finding a center spot of the image;
- 9.
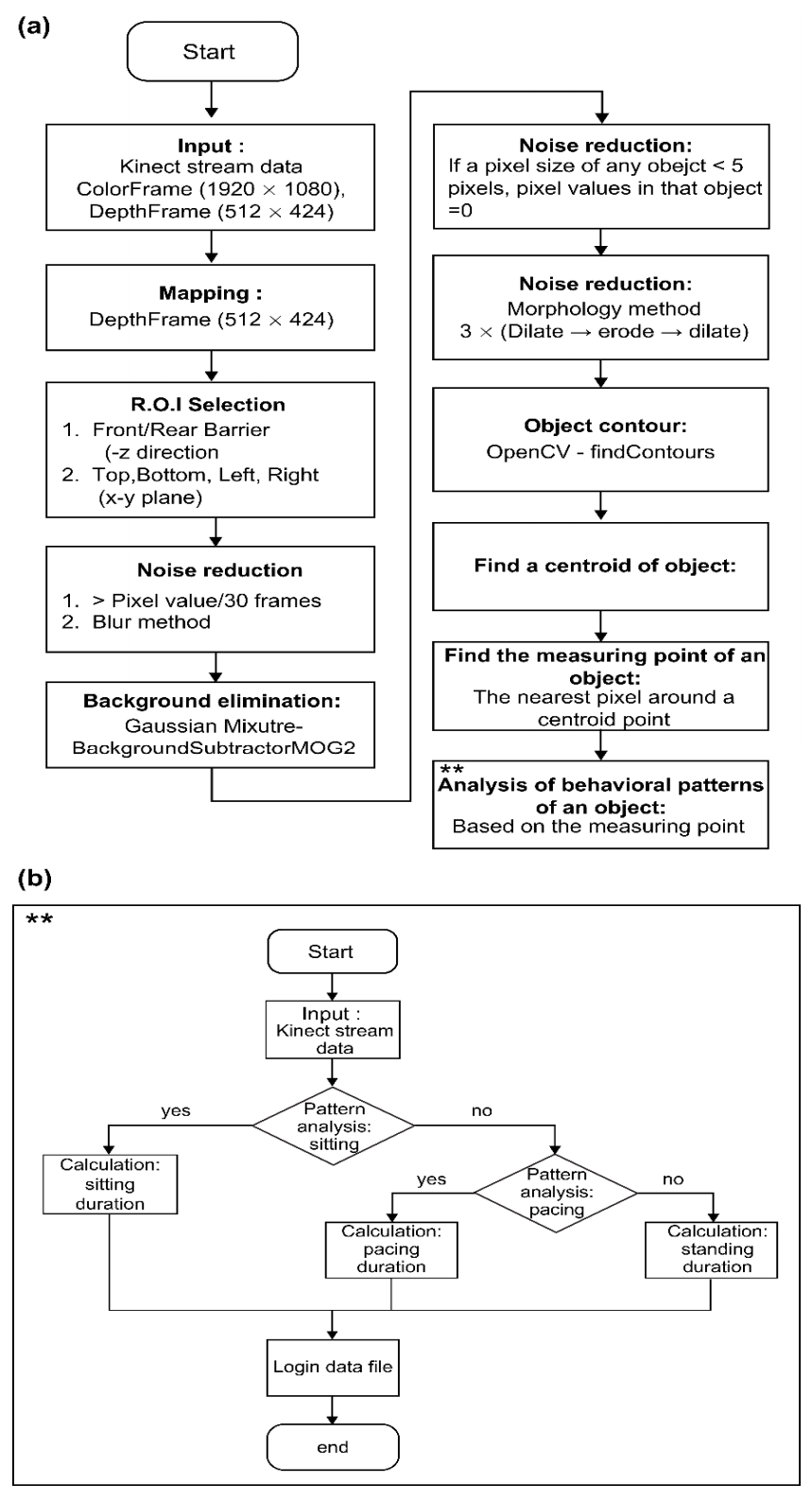
- Find the representing point of an object: rhe centroid of an object was tracked in real time and the pixel of the smallest depth value inside the centroid area as the measuring point of an object was found. “The centroid area” is defined by the rectangular area which has one side measuring 5~10 pixels, and “the smallest depth value” inside the centroid area approximately represents the head of an experimental monkey (Figure 3e).
- 10.
- Calculating behavioral patterns: based on the measurement point of an object obtained (9), we classified sitting, standing, and pacing by measuring the duration of each behavior. The classifying criteria of each pattern were defined based on being maintained for 1 s. The corresponding logical flow chart is shown in Figure 4.
2.2. Behavior Pattern Experiment and Analysis
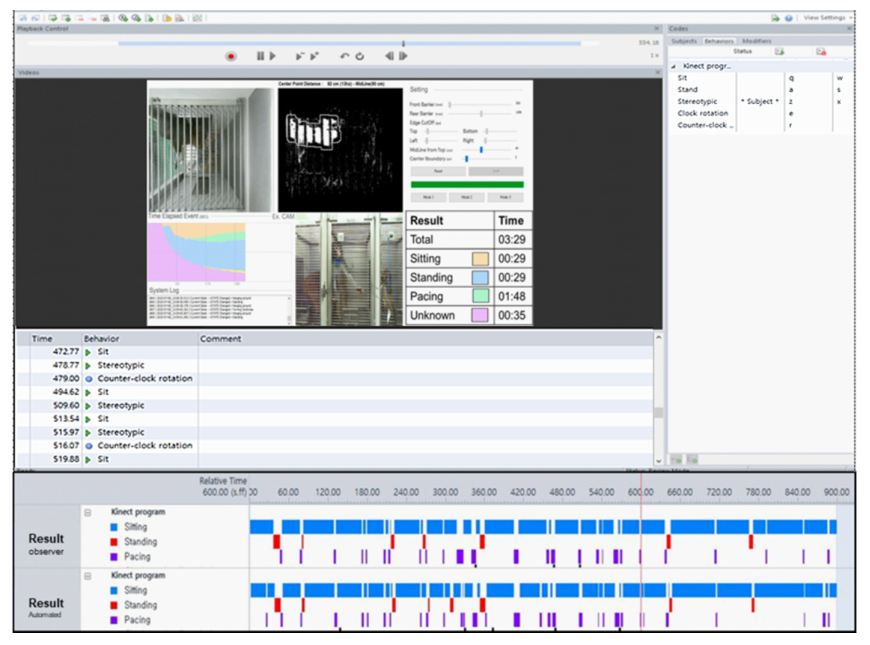
2.3. Manual Analysis Using Observer XT
3. Results
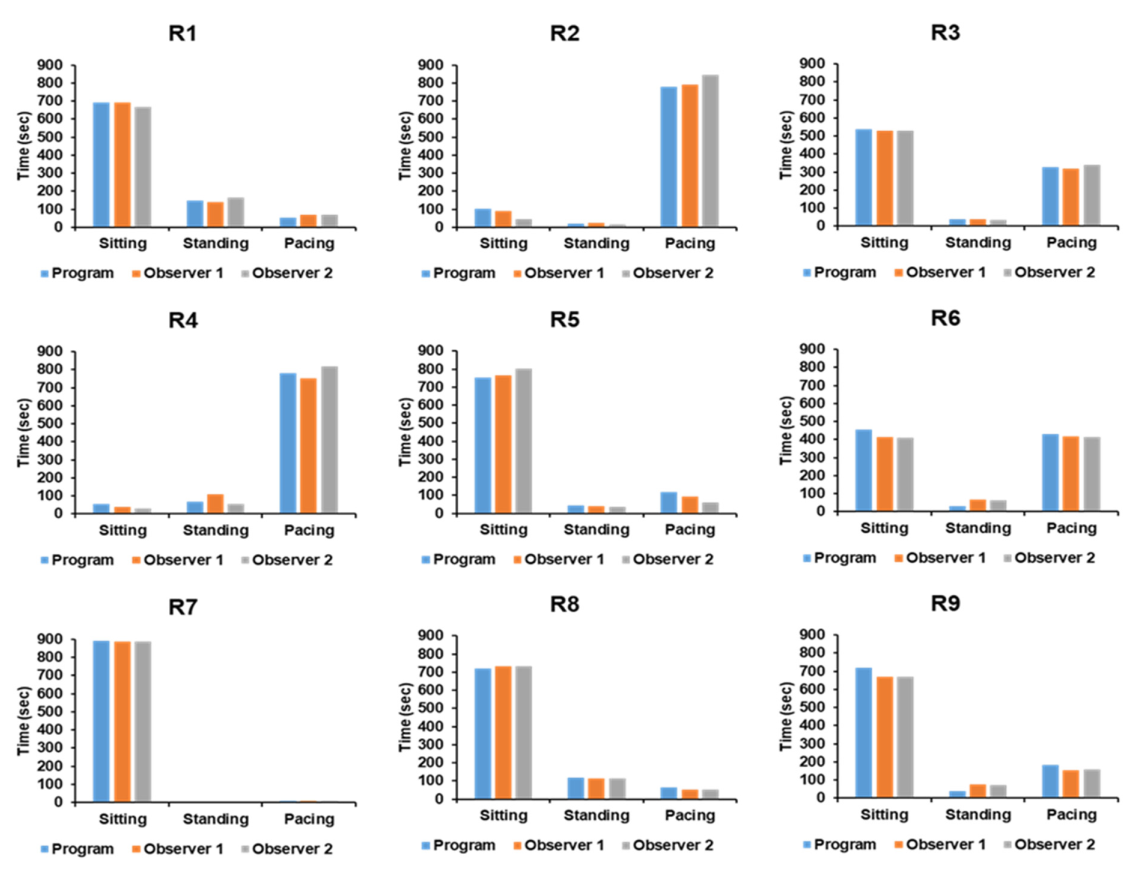
3.1. Measurement Results of Observer #1 and the Automated Program
3.2. Measurement Results of Observer #2 and the Automated Program
3.3. Statistical Analysis
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rhesus Macaque Genome, S.; Analysis, C.; Gibbs, R.A.; Rogers, J.; Katze, M.G.; Bumgarner, R.; Weinstock, G.M.; Mardis, E.R.; Remington, K.A.; Strausberg, R.L.; et al. Evolutionary and biomedical insights from the rhesus macaque genome. Science 2007, 316, 222–234. [Google Scholar] [CrossRef] [Green Version]
- Bailey, J.; Taylor, K. Non-human primates in neuroscience research: The case against its scientific necessity. Altern. Lab. Anim. 2016, 44, 43–69. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kessler, M.J.; Berard, J.D.; Rawlins, R.G. Effect of tetanus toxoid inoculation on mortality in the Cayo Santiago macaque population. Am. J. Primatol. 1988, 15, 93–101. [Google Scholar] [CrossRef] [PubMed]
- Watson, K.K.; Platt, M.L. Of mice and monkeys: Using non-human primate models to bridge mouse- and human-based investigations of autism spectrum disorders. J. Neurodev. Disord. 2012, 4, 21. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Seo, J.; Lee, Y.; Kim, B.S.; Park, J.; Yang, S.; Yoon, H.J.; Yoo, J.; Park, H.S.; Hong, J.J.; Koo, B.S.; et al. A non-human primate model for stable chronic Parkinson’s disease induced by MPTP administration based on individual behavioral quantification. J. Neurosci. Methods 2019, 311, 277–287. [Google Scholar] [CrossRef]
- Kalin, N.H.; Shelton, S.E. Nonhuman primate models to study anxiety, emotion regulation, and psychopathology. Ann. N. Y. Acad. Sci. 2003, 1008, 189–200. [Google Scholar] [CrossRef] [PubMed]
- Capitanio, J.P.; Emborg, M.E. Contributions of non-human primates to neuroscience research. Lancet 2008, 371, 1126–1135. [Google Scholar] [CrossRef]
- Nelson, E.E.; Winslow, J.T. Non-human primates: Model animals for developmental psychopathology. Neuropsychopharmacology 2009, 34, 90–105. [Google Scholar] [CrossRef]
- Nakamura, T.; Matsumoto, J.; Nishimaru, H.; Bretas, R.V.; Takamura, Y.; Hori, E.; Ono, T.; Nishijo, H. A Markerless 3D Computerized Motion Capture System Incorporating a Skeleton Model for Monkeys. PLoS ONE 2016, 11, e0166154. [Google Scholar] [CrossRef] [Green Version]
- Dell, A.I.; Bender, J.A.; Branson, K.; Couzin, I.D.; de Polavieja, G.G.; Noldus, L.P.; Perez-Escudero, A.; Perona, P.; Straw, A.D.; Wikelski, M.; et al. Automated image-based tracking and its application in ecology. Trends Ecol. Evol. 2014, 29, 417–428. [Google Scholar] [CrossRef]
- Krakauer, J.W.; Ghazanfar, A.A.; Gomez-Marin, A.; MacIver, M.A.; Poeppel, D. Neuroscience Needs Behavior: Correcting a Reductionist Bias. Neuron 2017, 93, 480–490. [Google Scholar] [CrossRef] [Green Version]
- Schwarz, D.A.; Lebedev, M.A.; Hanson, T.L.; Dimitrov, D.F.; Lehew, G.; Meloy, J.; Rajangam, S.; Subramanian, V.; Ifft, P.J.; Li, Z.; et al. Chronic, wireless recordings of large-scale brain activity in freely moving rhesus monkeys. Nat. Methods 2014, 11, 670–676. [Google Scholar] [CrossRef]
- Courellis, H.S.; Nummela, S.U.; Metke, M.; Diehl, G.W.; Bussell, R.; Cauwenberghs, G.; Miller, C.T. Spatial encoding in primate hippocampus during free navigation. PLoS Biol. 2019, 17, e3000546. [Google Scholar] [CrossRef]
- Labuguen, R.; Bardeloza, D.; Negrete, S.; Matsumoto, J.; Inoue, K.-I.; Shibata, T. Primate Markerless Pose Estimation and Movement Analysis Using DeepLabCut. In Proceedings of the 2019 Joint 8th International Conference on Informatics, Electronics & Vision (ICIEV) and 2019 3rd International Conference on Imaging, Vision & Pattern Recognition (icIVPR), Washington, DC, USA, 30 May–2 June 2019; pp. 297–300. [Google Scholar]
- Liu, S.; Iriate-Diaz, J.; Hatsopoulos, N.G.; Ross, C.F.; Takahashi, K.; Chen, Z. Dynamics of motor cortical activity during naturalistic feeding behavior. J. Neural. Eng. 2019, 16, 026038. [Google Scholar] [CrossRef]
- Crall, J.D.; Gravish, N.; Mountcastle, A.M.; Combes, S.A. BEEtag: A Low-Cost, Image-Based Tracking System for the Study of Animal Behavior and Locomotion. PLoS ONE 2015, 10, e0136487. [Google Scholar] [CrossRef] [Green Version]
- Cao, Z.; Hidalgo, G.; Simon, T.; Wei, S.E.; Sheikh, Y. OpenPose: Realtime Multi-Person 2D Pose Estimation Using Part Affinity Fields. IEEE Trans. Pattern. Anal. Mach. Intell. 2021, 43, 172–186. [Google Scholar] [CrossRef] [Green Version]
- Mathis, A.; Mamidanna, P.; Cury, K.M.; Abe, T.; Murthy, V.N.; Mathis, M.W.; Bethge, M. DeepLabCut: Markerless pose estimation of user-defined body parts with deep learning. Nat. Neurosci. 2018, 21, 1281–1289. [Google Scholar] [CrossRef]
- Fitzsimmons, N.A.; Lebedev, M.A.; Peikon, I.D.; Nicolelis, M.A. Extracting kinematic parameters for monkey bipedal walking from cortical neuronal ensemble activity. Front Integr. Neurosci. 2009, 3, 3. [Google Scholar] [CrossRef] [Green Version]
- Bala, P.C.; Eisenreich, B.R.; Yoo, S.B.M.; Hayden, B.Y.; Park, H.S.; Zimmermann, J. Automated markerless pose estimation in freely moving macaques with OpenMonkeyStudio. Nat. Commun. 2020, 11, 4560. [Google Scholar] [CrossRef]
- Mathis, M.W.; Mathis, A. Deep learning tools for the measurement of animal behavior in neuroscience. Curr. Opin. Neurobiol. 2020, 60, 1–11. [Google Scholar] [CrossRef]
- Graving, J.M.; Chae, D.; Naik, H.; Li, L.; Koger, B.; Costelloe, B.R.; Couzin, I.D. DeepPoseKit, a software toolkit for fast and robust animal pose estimation using deep learning. Elife 2019, 8, e47994. [Google Scholar] [CrossRef]
- Gunel, S.; Rhodin, H.; Morales, D.; Campagnolo, J.; Ramdya, P.; Fua, P. DeepFly3D, a deep learning-based approach for 3D limb and appendage tracking in tethered, adult Drosophila. Elife 2019, 8, e48571. [Google Scholar] [CrossRef]
- Libey, T.; Fetz, E.E. Open-Source, Low Cost, Free-Behavior Monitoring, and Reward System for Neuroscience Research in Non-human Primates. Front Neurosci. 2017, 11, 265. [Google Scholar] [CrossRef]
- Wang, Z.; Mirbozorgi, S.A.; Ghovanloo, M. Towards a kinect-based behavior recognition and analysis system for small animals. In Proceedings of the 2015 IEEE Biomedical Circuits and Systems Conference (BioCAS), Atlanta, GA, USA, 22–24 October 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Foster, J.D.; Nuyujukian, P.; Freifeld, O.; Gao, H.; Walker, R.; Ryu, S.I.; Meng, T.H.; Murmann, B.; Black, M.J.; Shenoy, K.V. A freely-moving monkey treadmill model. J. Neural. Eng. 2014, 11, 046020. [Google Scholar] [CrossRef]
- Sellers, W.I.; Hirasaki, E. Markerless 3D motion capture for animal locomotion studies. Biol. Open 2014, 3, 656–668. [Google Scholar] [CrossRef] [Green Version]
- Emborg, M.E. Nonhuman Primate Models of Neurodegenerative Disorders. ILAR J. 2017, 58, 190–201. [Google Scholar] [CrossRef]
- Kim, K.; Jeon, H.A.; Seo, J.; Park, J.; Won, J.; Yeo, H.G.; Jeon, C.Y.; Huh, J.W.; Kim, Y.H.; Hong, Y.; et al. Evaluation of cognitive function in adult rhesus monkeys using the finger maze test. Appl. Anim. Behav. Sci. 2020, 224, 104945. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Definition | ||
|---|---|---|
| Program | Observer | |
| Sitting | When positioned for more than 1 s below the specified height without movement | Sitting without pacing and lasting longer than 1 s |
| Standing | When positioned for more than 1 s above the specified height without movement | Standing without pacing and lasting longer than 1 s |
| Pacing | When the measuring point moves more than 1 s | Pacing lasting more than 1 s |
| Action | Observer #1 | Program | t | p-Value |
|---|---|---|---|---|
| Mean ± SE | Mean ± SE | |||
| Sitting | 535.89 ± 99.92 | 543.78 ± 98.19 | −1.268 | 0.240 |
| Standing | 68.00 ± 14.94 | 55.67 ± 15.93 | 1.933 | 0.089 |
| Pacing | 296.00 ± 100.10 | 304.78 ± 100.38 | −1.963 | 0.085 |
| Action | Observer #2 | Program | t/z | p-Value |
|---|---|---|---|---|
| Mean ± SE | Mean ± SE | |||
| Sitting | 529.67 ± 103.99 | 543.78 ± 98.19 | −1.324 | 0.222 |
| Standing | 62.00 ± 16.76 | 55.67 ± 15.94 | 1.115 | 0.297 |
| Pacing † | 308.33 ± 108.80 | 304.78 ± 100.38 | 0.340 | 0.743 |
| Subject # | R1 | R2 | R3 | R4 | R5 | R6 | R7 | R8 | R9 | |
|---|---|---|---|---|---|---|---|---|---|---|
| Sitting | Program | 690 | 102 | 536 | 54 | 751 | 456 | 891 | 719 | 717 |
| Observer #1 | 691 | 88 | 531 | 38 | 766 | 414 | 887 | 732 | 671 | |
| Observer #2 | 667 | 46 | 528 | 14 | 801 | 408 | 889 | 734 | 669 | |
| Standing | Program | 148 | 19 | 38 | 68 | 42 | 32 | 0 | 117 | 37 |
| Observer #1 | 138 | 23 | 41 | 108 | 40 | 66 | 6 | 115 | 74 | |
| Observer #2 | 164 | 14 | 34 | 57 | 36 | 62 | 5 | 115 | 72 | |
| Pacing | Program | 54 | 780 | 326 | 779 | 116 | 432 | 9 | 64 | 184 |
| Observer #1 | 71 | 789 | 321 | 752 | 95 | 419 | 7 | 53 | 155 | |
| Observer #2 | 69 | 844 | 339 | 826 | 61 | 412 | 8 | 52 | 159 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, S.K.; Kim, K.; Rim, Y.; Han, M.; Lee, Y.; Park, S.-H.; Choi, W.S.; Chun, K.J.; Lee, D.-S. A Novel, Automated, and Real-Time Method for the Analysis of Non-Human Primate Behavioral Patterns Using a Depth Image Sensor. Appl. Sci. 2022, 12, 471. https://doi.org/10.3390/app12010471
Han SK, Kim K, Rim Y, Han M, Lee Y, Park S-H, Choi WS, Chun KJ, Lee D-S. A Novel, Automated, and Real-Time Method for the Analysis of Non-Human Primate Behavioral Patterns Using a Depth Image Sensor. Applied Sciences. 2022; 12(1):471. https://doi.org/10.3390/app12010471
Chicago/Turabian StyleHan, Sang Kuy, Keonwoo Kim, Yejoon Rim, Manhyung Han, Youngjeon Lee, Sung-Hyun Park, Won Seok Choi, Keyoung Jin Chun, and Dong-Seok Lee. 2022. "A Novel, Automated, and Real-Time Method for the Analysis of Non-Human Primate Behavioral Patterns Using a Depth Image Sensor" Applied Sciences 12, no. 1: 471. https://doi.org/10.3390/app12010471