
Estimation Formula of Modal Frequency of High-Rise Buildings under Different Wind Speeds during Typhoons

Abstract
:1. Introduction
2. General Introductions to Field Measurements
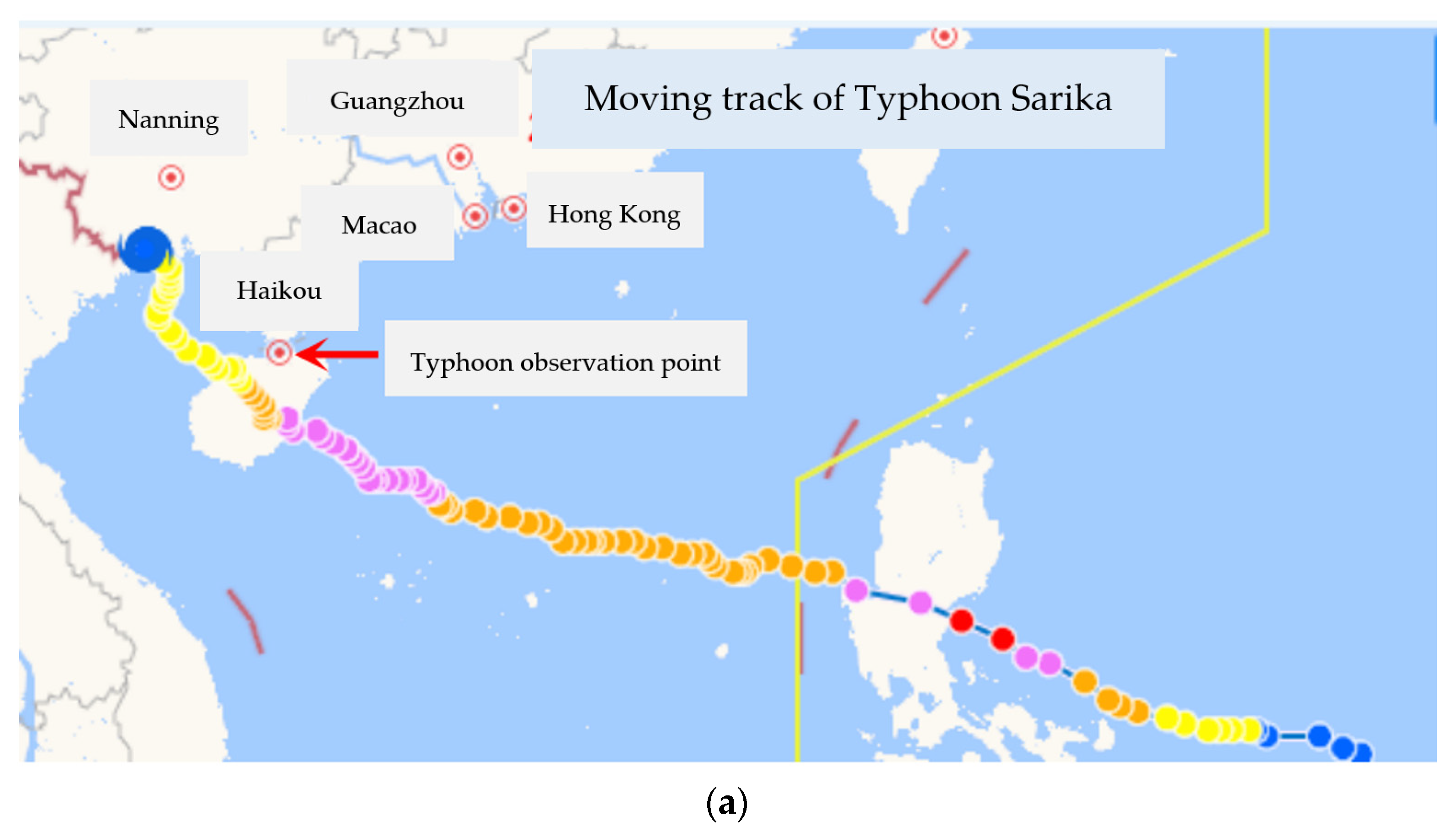
2.1. Landing of Typhoon Sarika
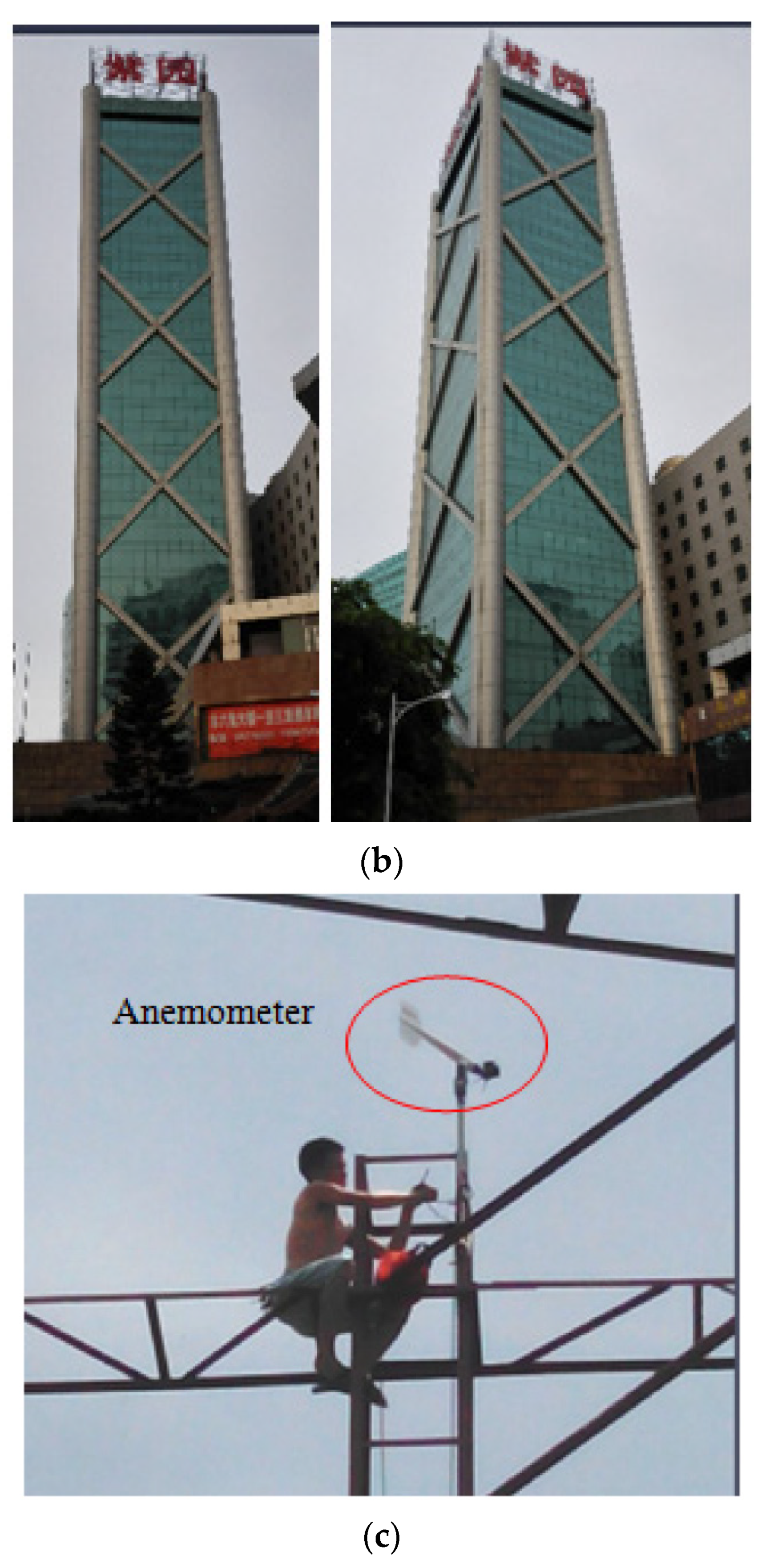
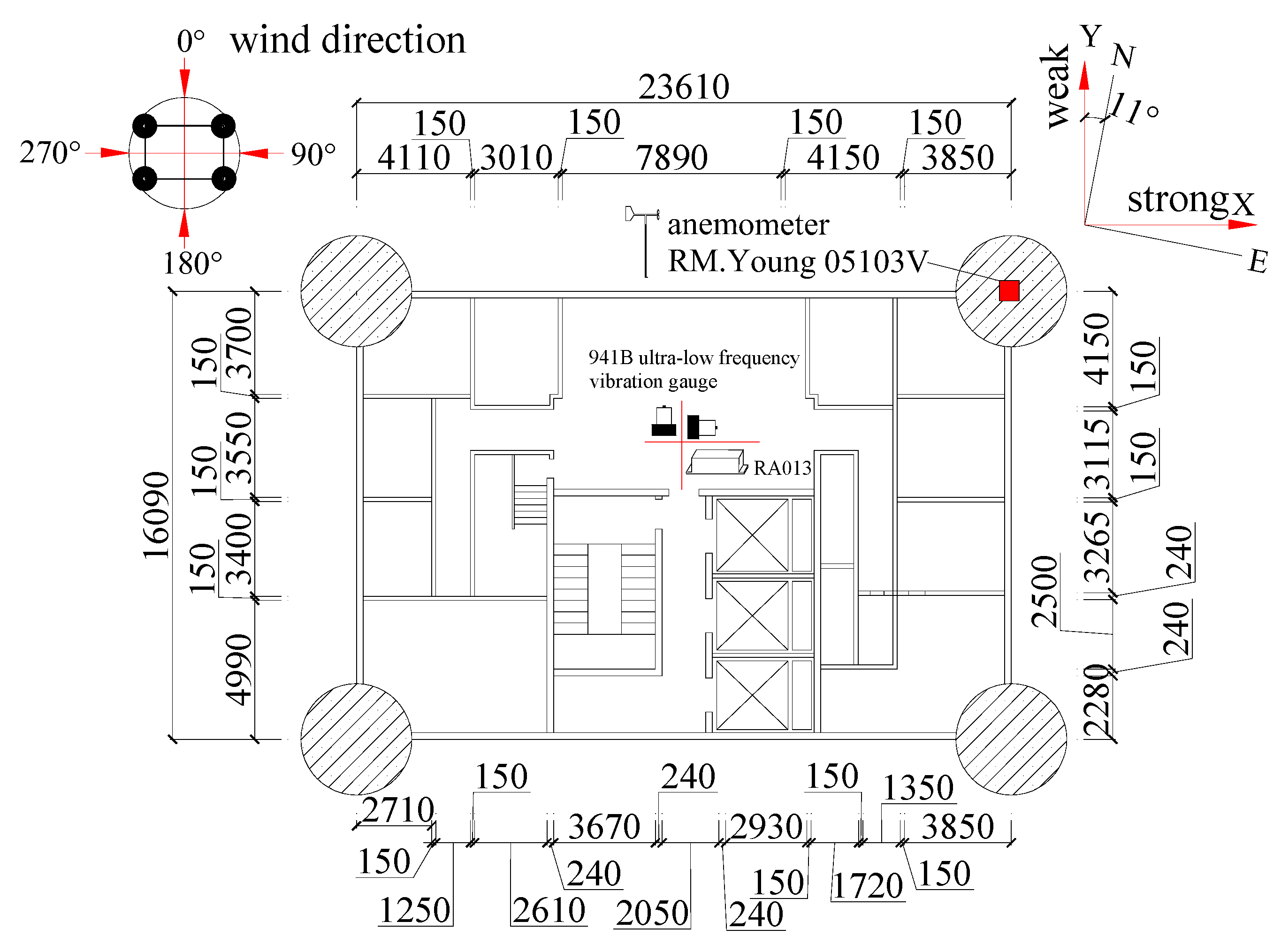
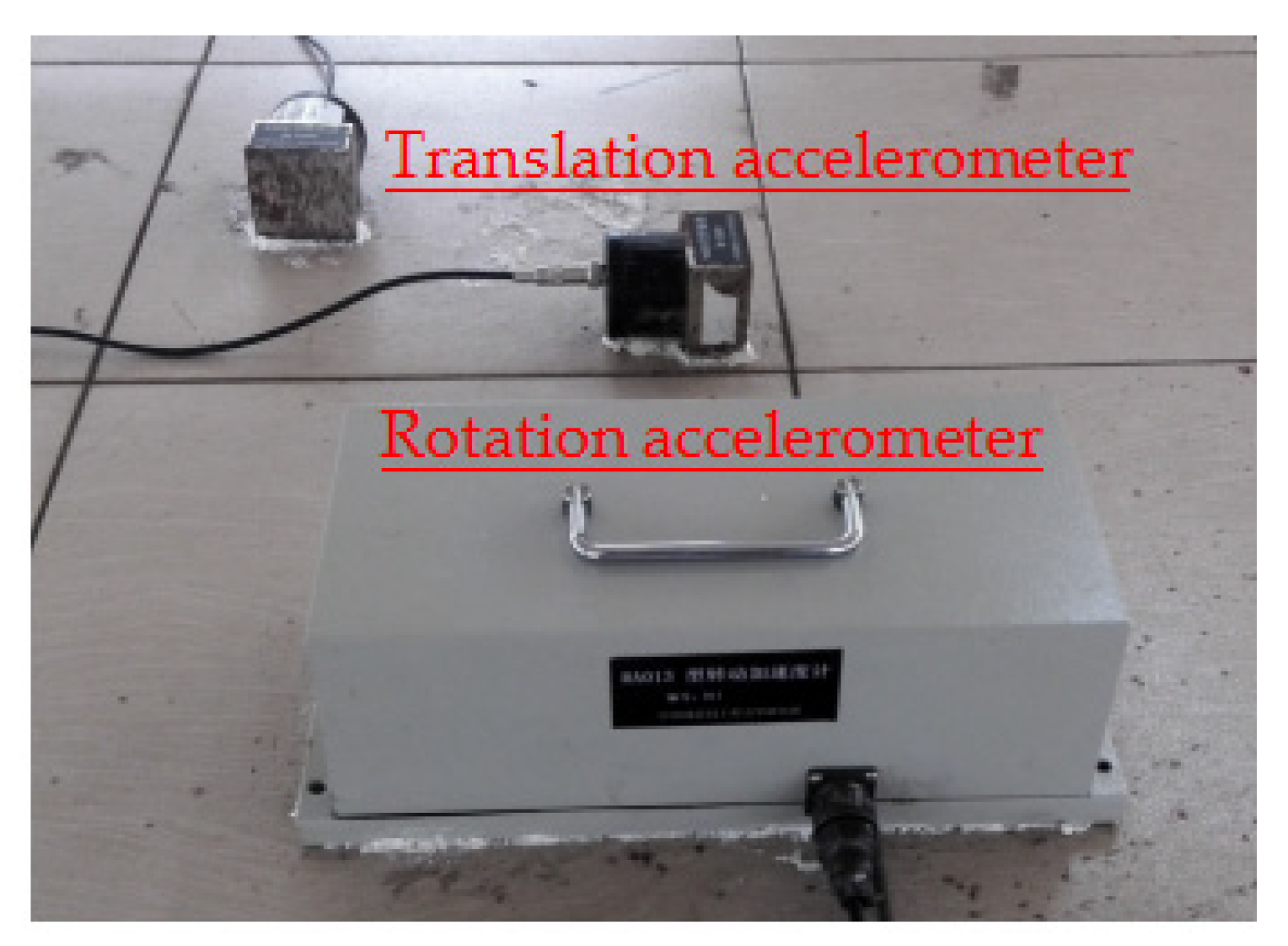
2.2. The Monitoring System
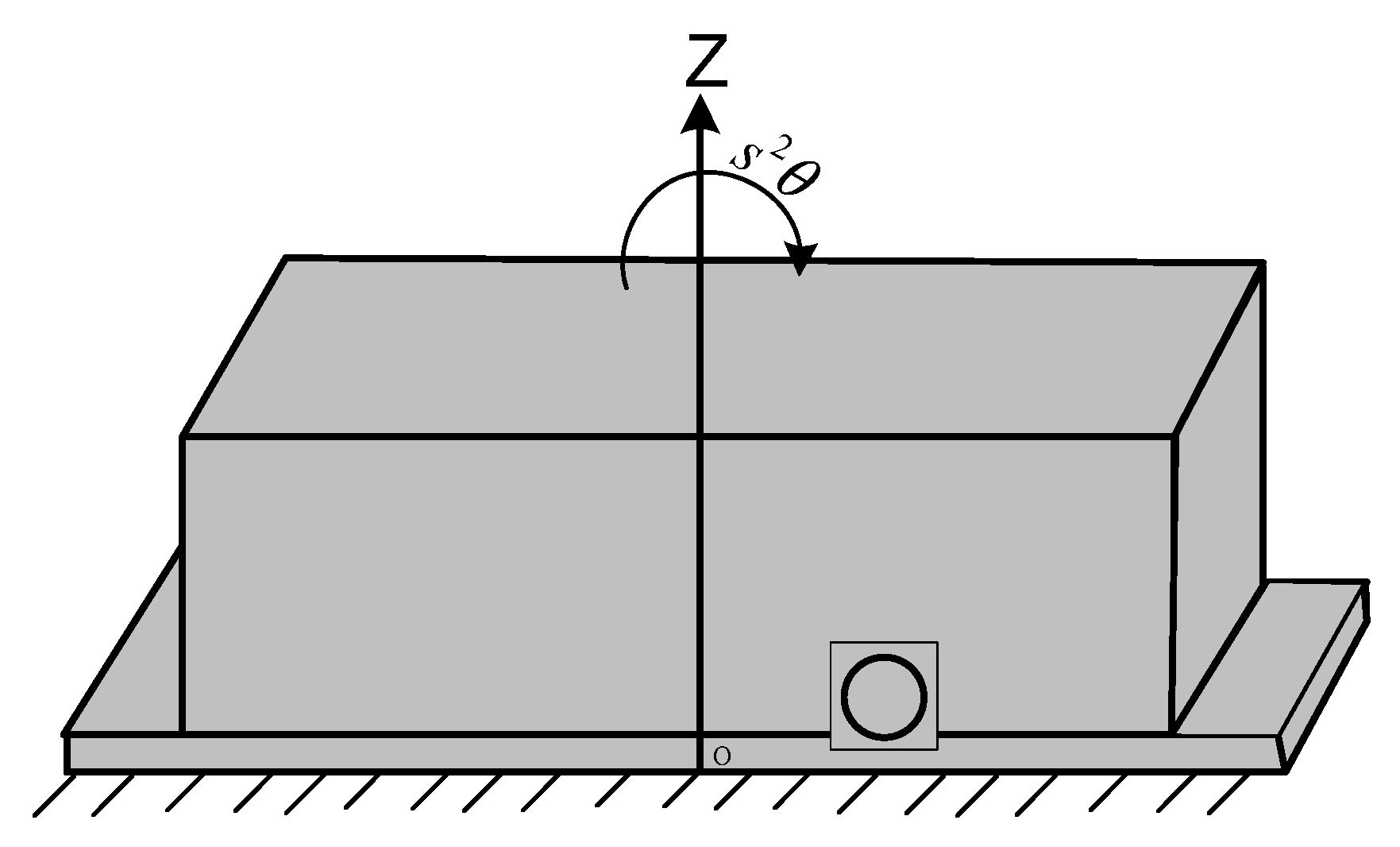
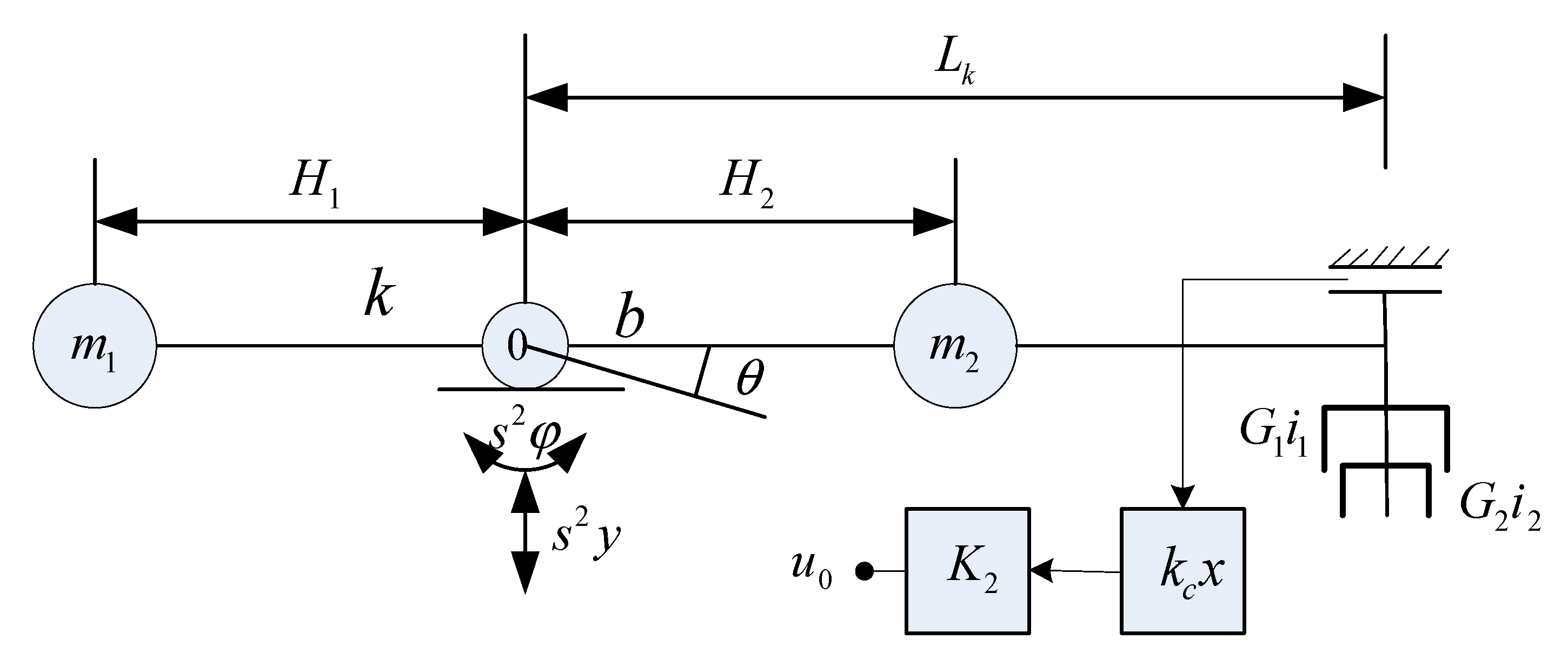
2.3. Testing Principle of the Rotation Accelerometer
3. Measured Results Analysis
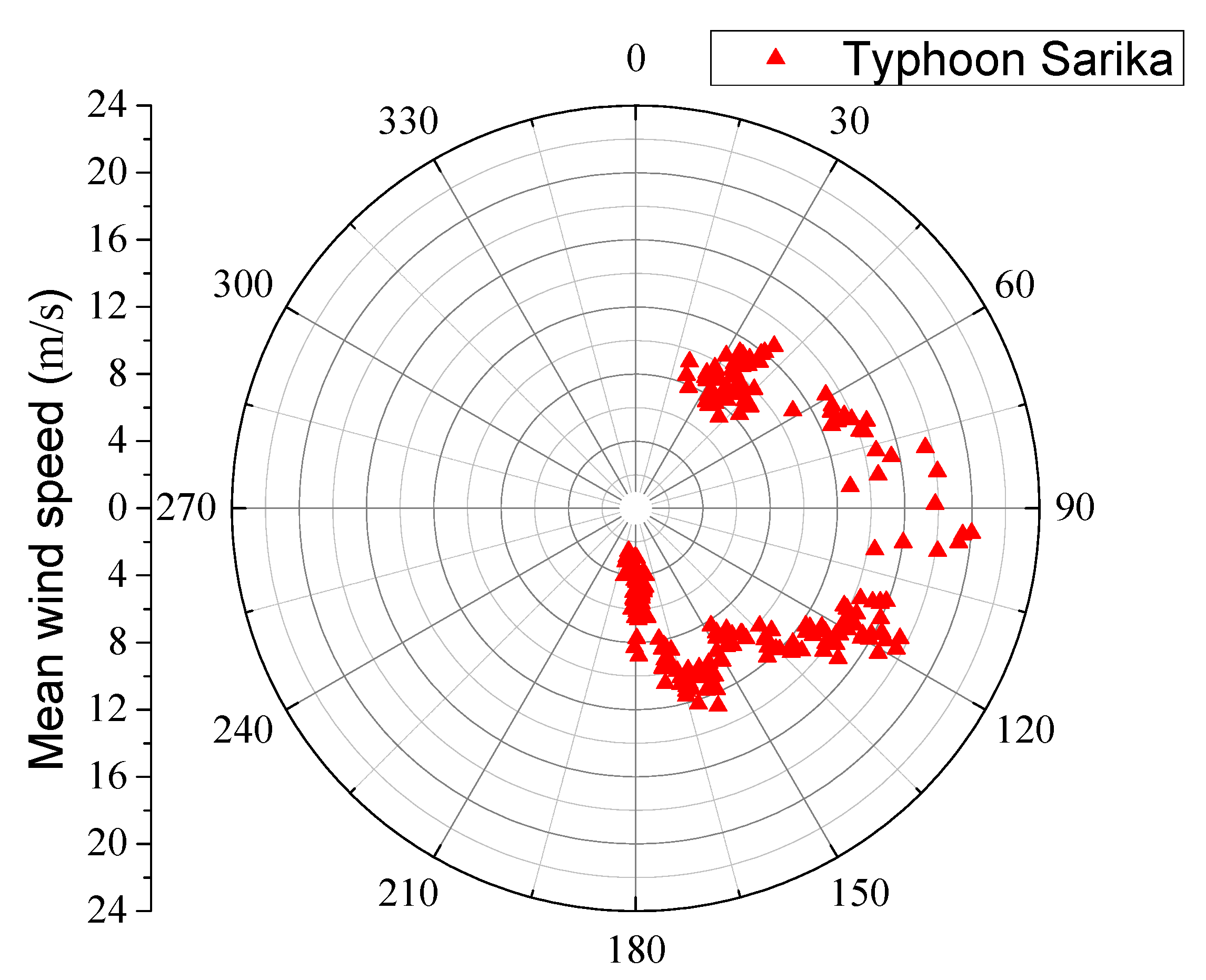
3.1. Time History of Wind Field Atop the Building
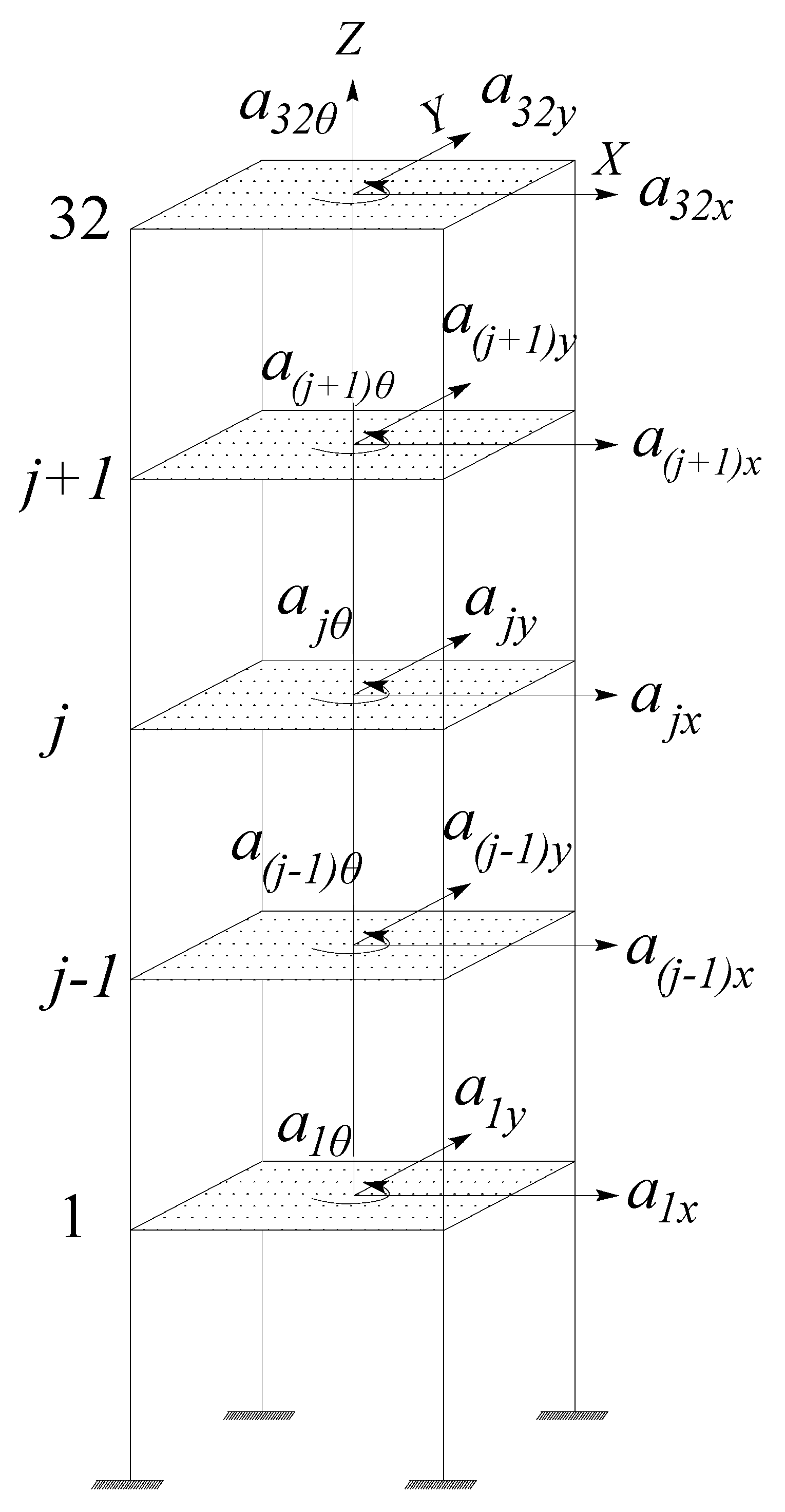
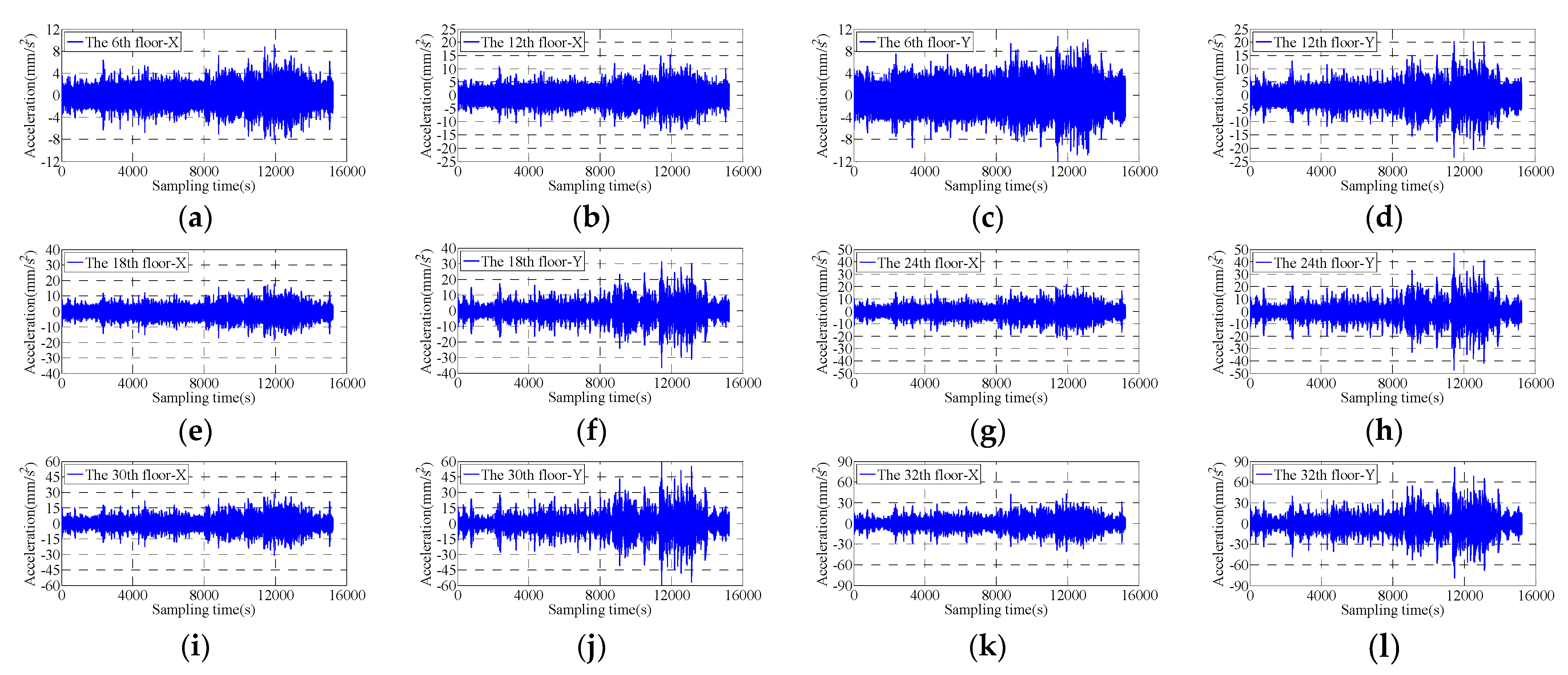
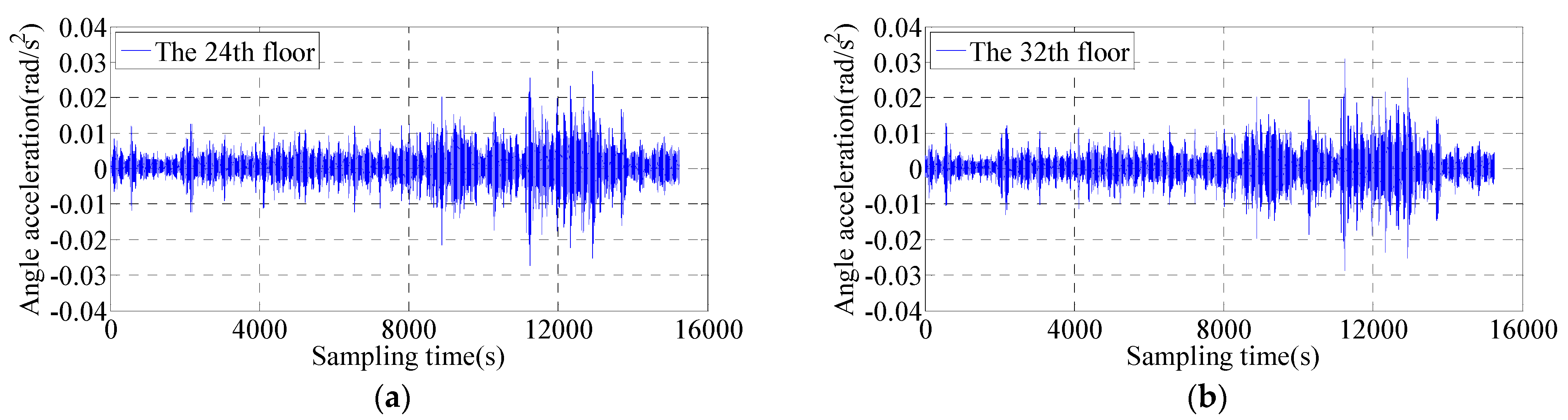
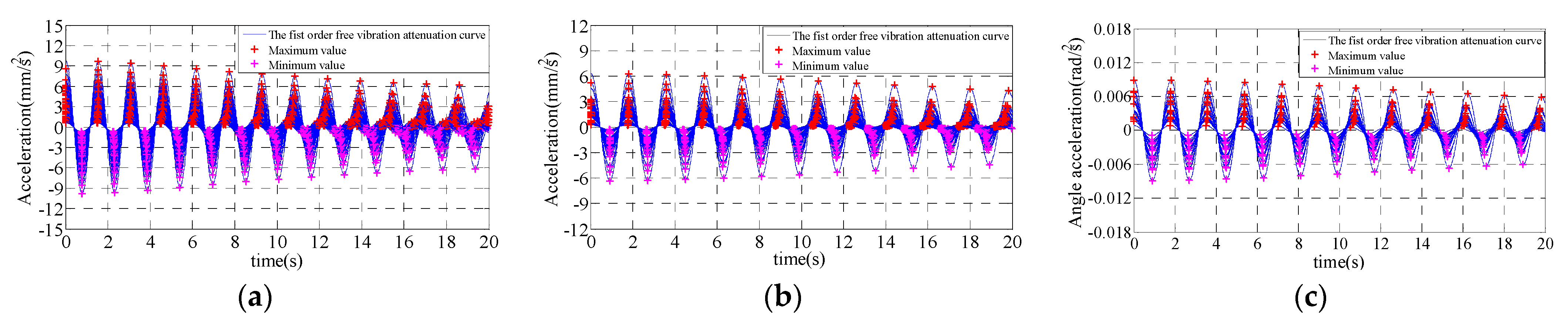
3.2. The Measured Time History of Acceleration
3.3. Power Spectral Density Function
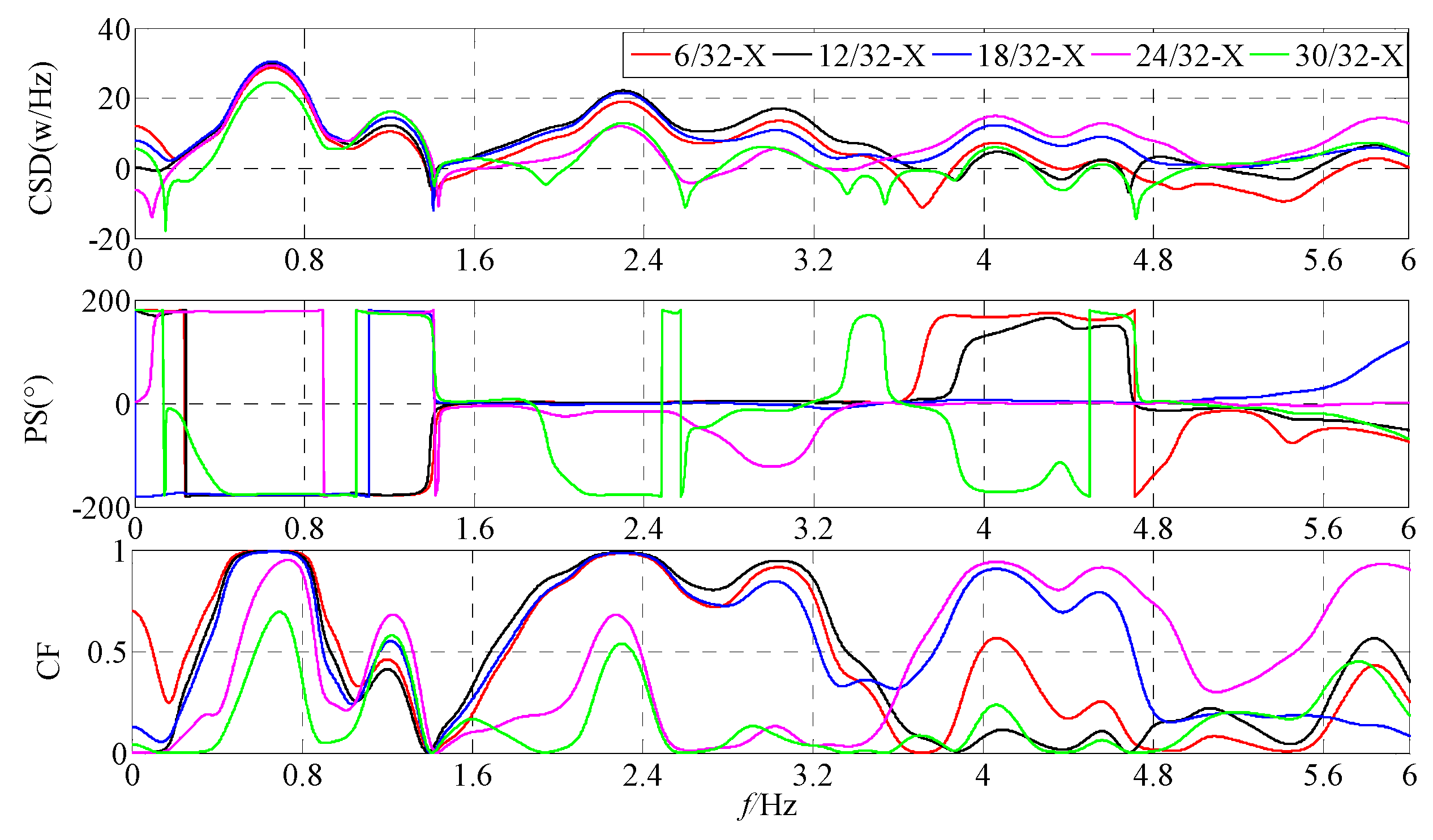
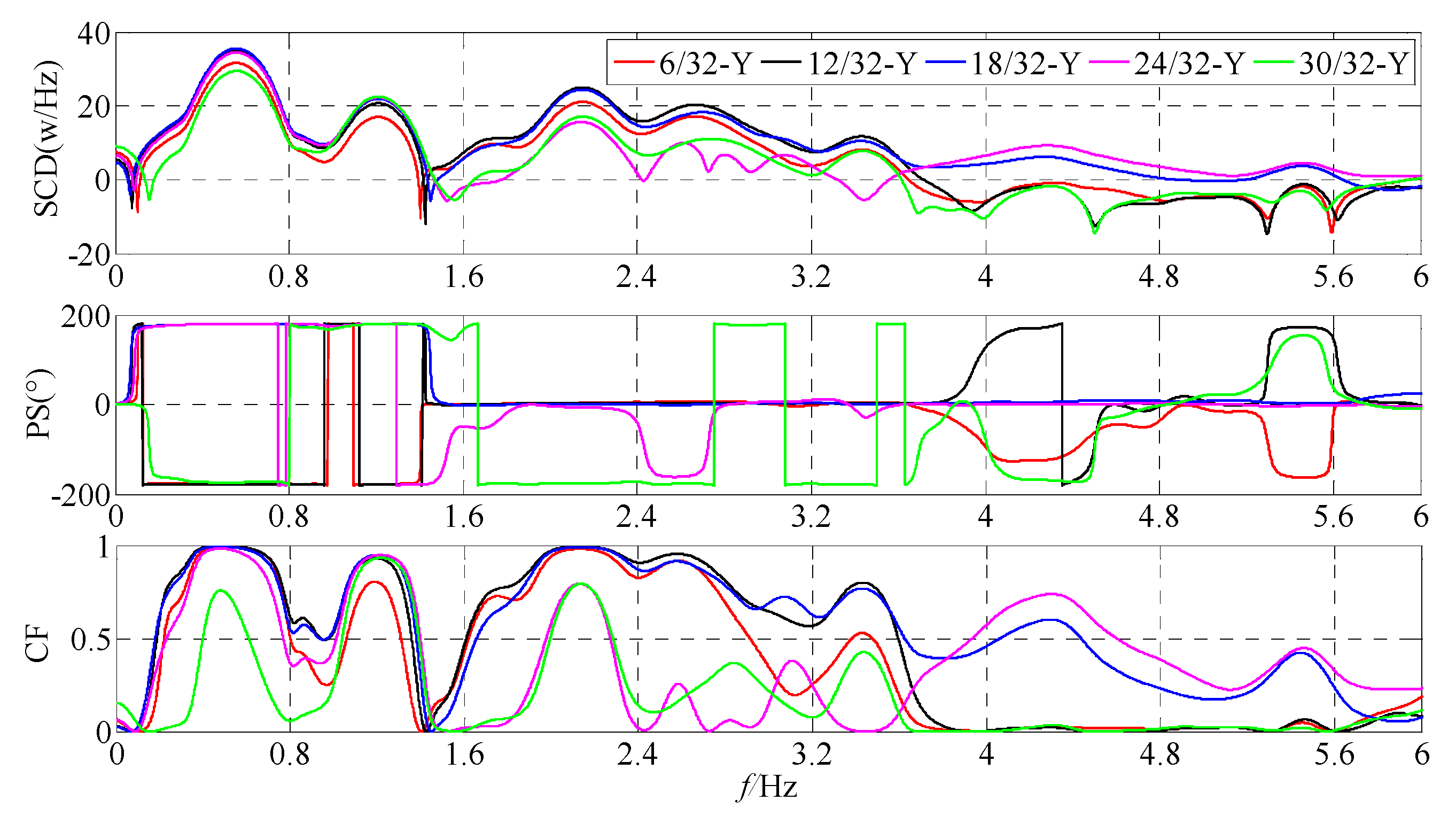
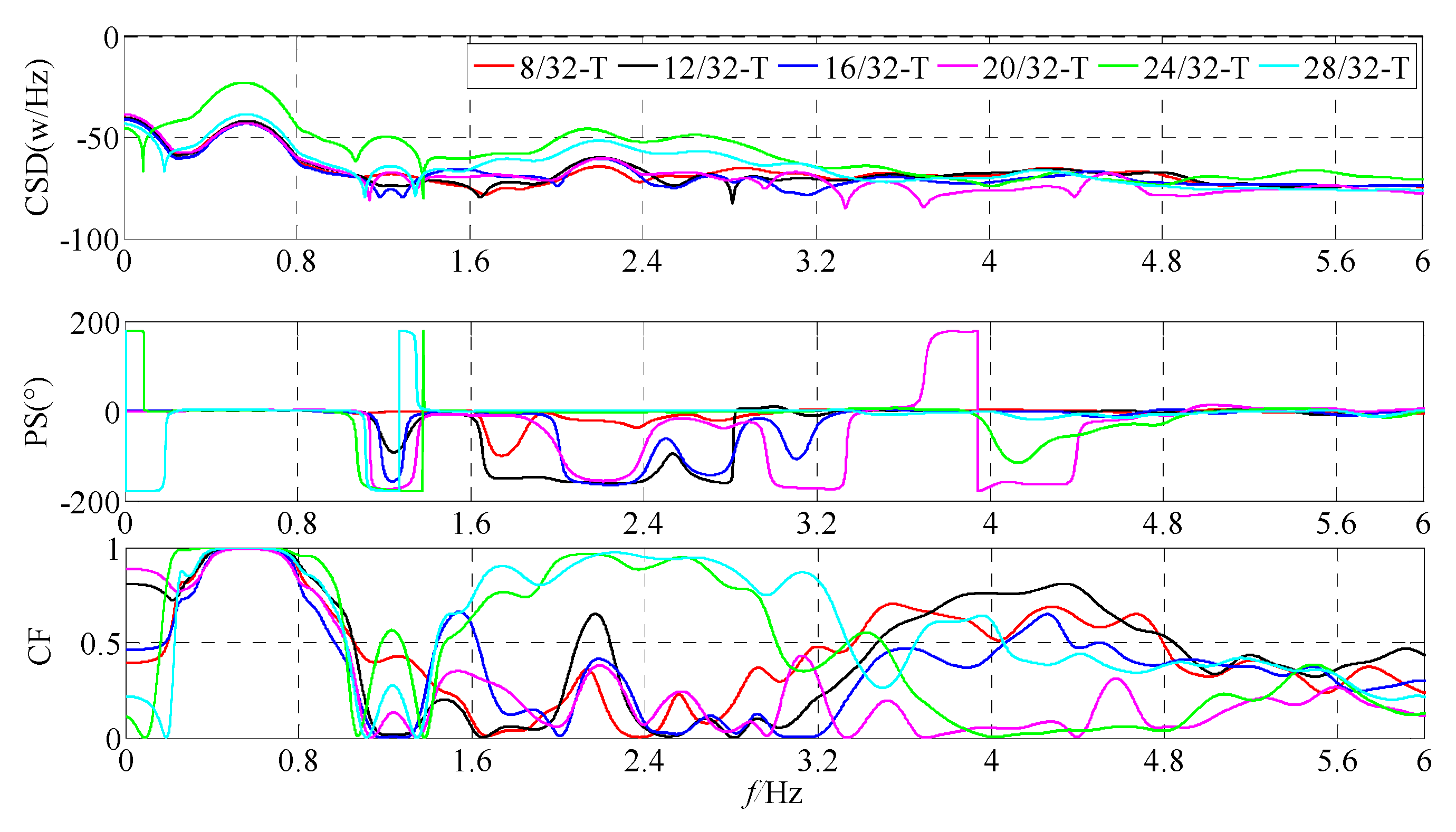
3.4. Cross Spectral Density Function (CSD), Phase Spectrum (PS), and Coherence Function (CF)
4. Experimental Modal Parameters Analysis
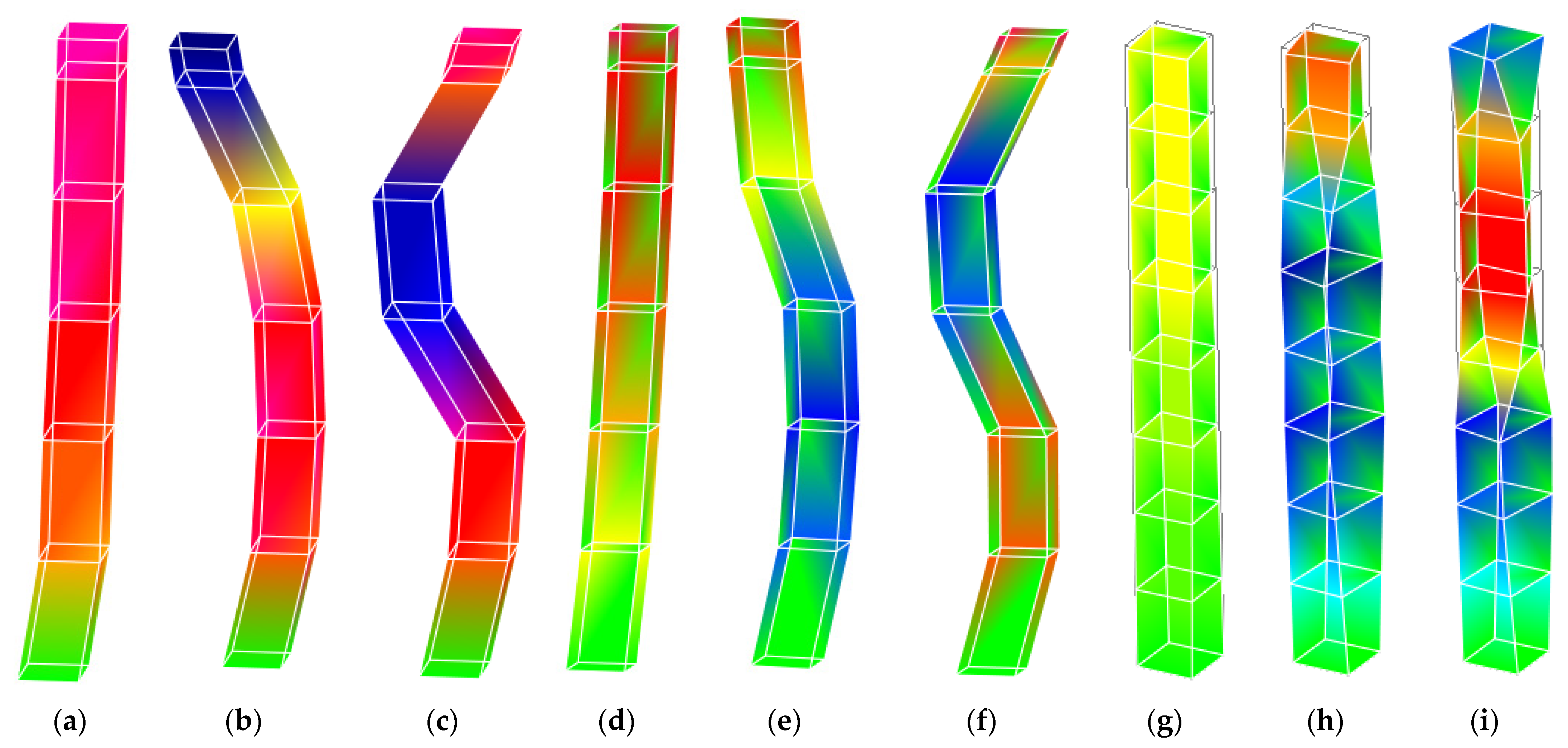
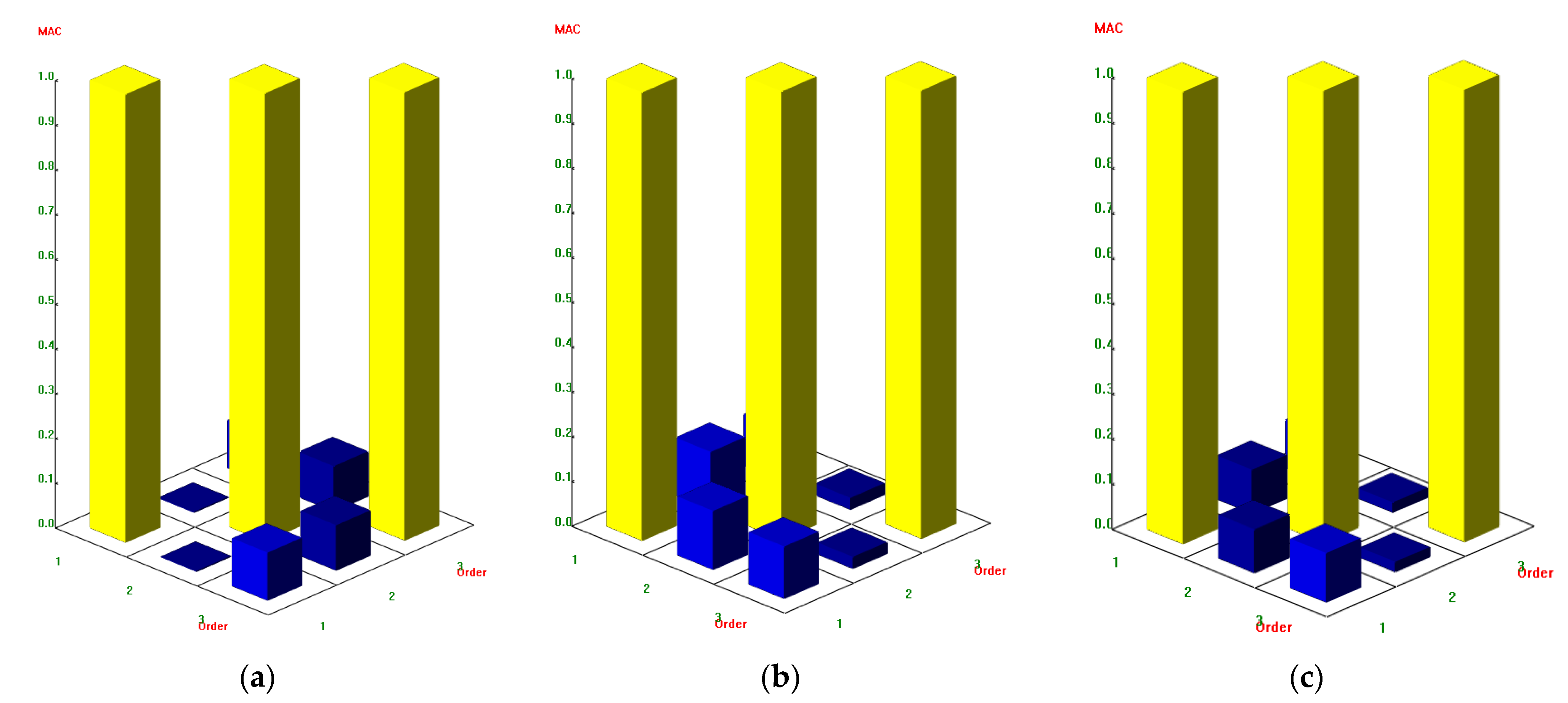
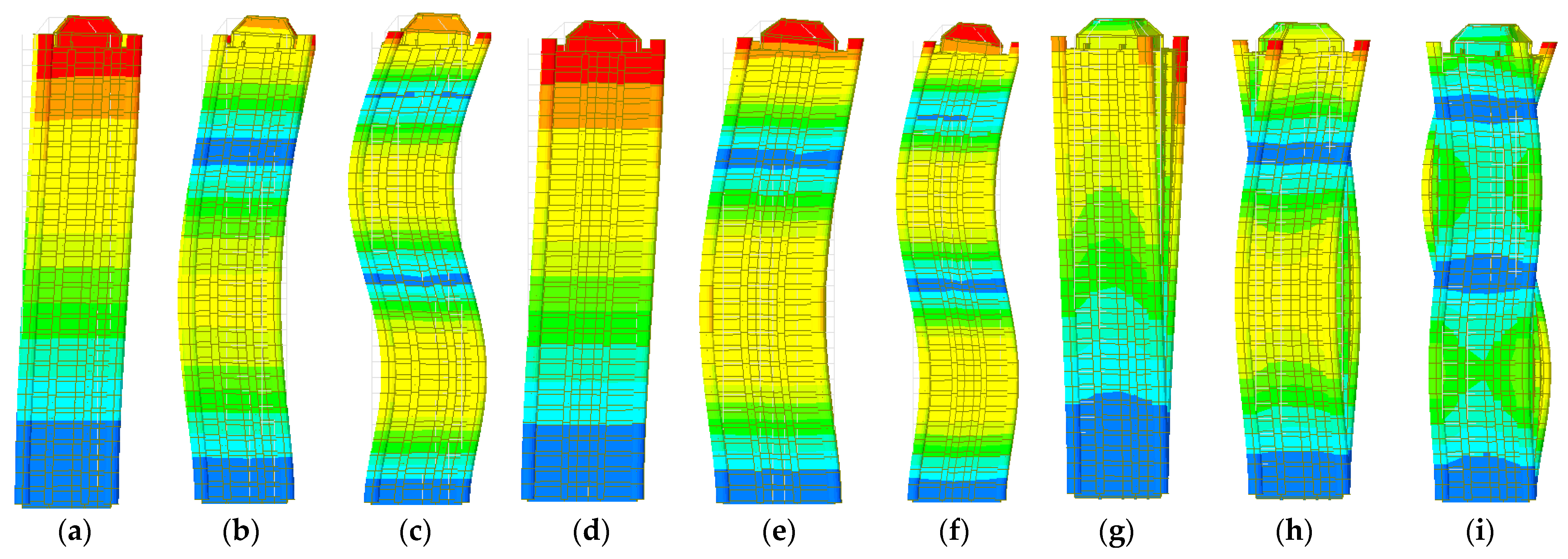
4.1. Comparisons of the Measured Vibration Modes and Those Simulated by Finite Element Method
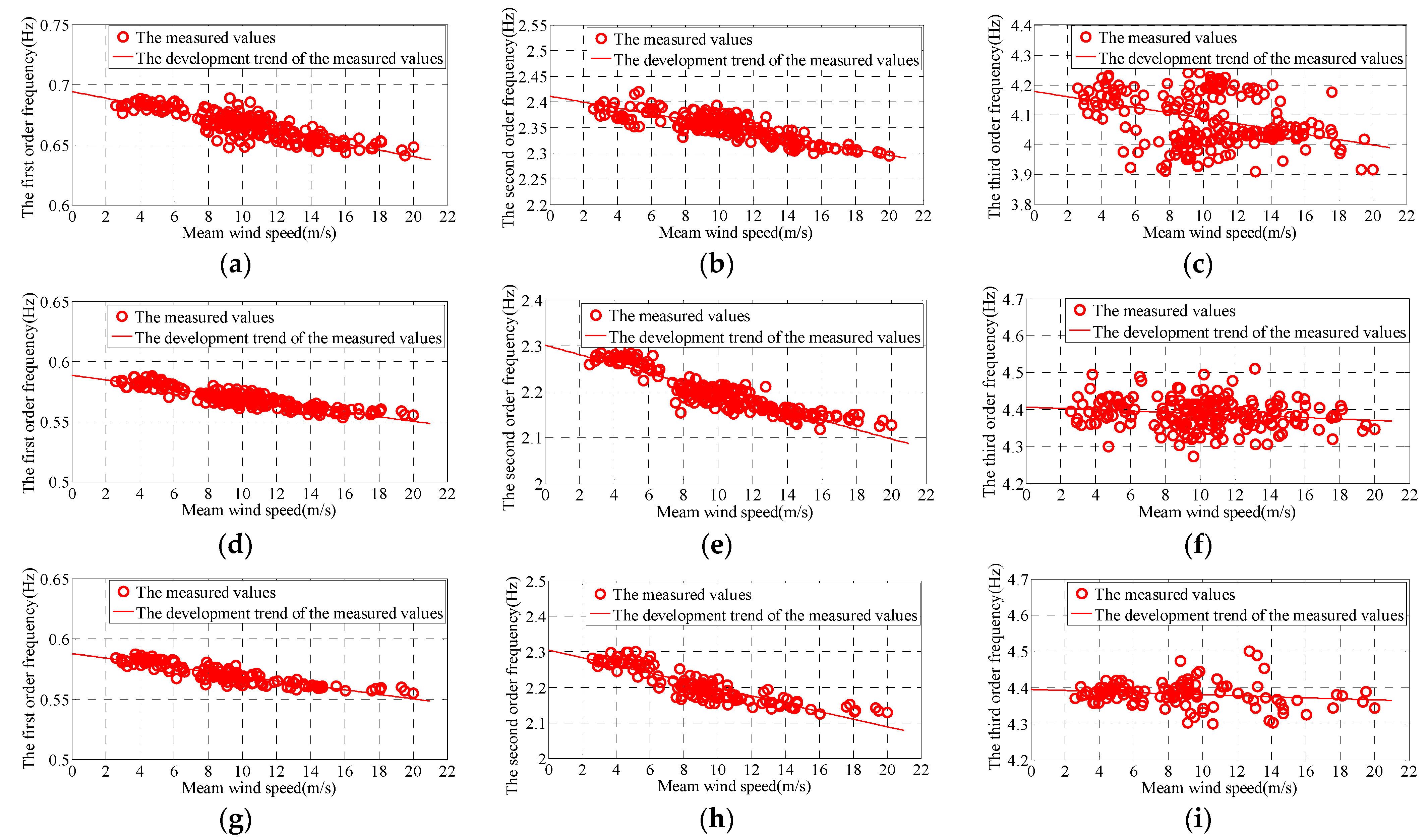
4.2. Measured Modal Frequency under Different Wind Speeds
4.2.1. Identification Method of Modal Parameters
4.2.2. Calculation Method of Fundamental Frequencies of High-Rise Buildings under Different Wind Speeds
5. Conclusions
- (1)
- The measured value of the maximum instantaneous wind speed atop the building is 34.84 m/s, and that of mean wind speed is about 20.02 m/s when the basic time duration is 10 min. Besides, the peak value of the maximum angular acceleration at the top floor along the torsional direction is 0.031 rad/s2.
- (2)
- The auto-power spectral density function, cross-spectral density function, phase spectrum, and coherence function can be applied to identify the first three-order modal frequencies of the building and to judge where different floors locate in the vibration shapes of resonance region. On the basis of phase spectrum and coherence functions, it can be judged whether the corresponding frequencies of the auto-power spectral and cross-spectral density functions at wave crests are true modal frequencies.
- (3)
- The first three-order vibration modal frequencies decrease linearly with the growth in mean wind speed when the mean wind speed is within the range of 0~20 m/s, which indicates that wind-induced vibration has significant influences on the high-rise buildings.
- (4)
- The existing codes can only estimate the fundamental frequency of high-rise buildings under static wind, but the frequency estimation of high-rise buildings under typhoon is not involved. This paper took the influences of wind-induced response on fundamental frequencies into consideration under the action of typhoons, and then the estimation formula of the modal frequencies of high-rise buildings considering the influences of different wind speeds was put forward, the formula can calculate the natural vibration frequency of high-rise buildings under strong wind in the design phase in a precise way.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Patil, S.P.; Sangle, K.K. Tests of steel fibre reinforced concrete beams under predominant torsion. J. Build. Eng. 2016, 6, 157–162. [Google Scholar] [CrossRef]
- Ahmed, O.Z.; Zaker, M. Experimental Study on Torsion of Steel Fiber Reinforced Concrete Members with Ternary Blended Concrete. Int. J. Eng. Sci. Res. Technol. 2014, 3, 646–652. [Google Scholar]
- Ren, R.; Xue, J.Y.; Chen, Z.P.; Mi, Z.L. Experimental Study on Behavior of Channel Steel Reinforced Concrete Beam under Pure Torsion. Adv. Mater. Res. 2011, 368, 2094–2097. [Google Scholar] [CrossRef]
- Schladitz, F.; Curbach, M. Torsion tests on textile-reinforced concrete strengthened specimens. Mater. Struct. 2012, 45, 31–40. [Google Scholar] [CrossRef]
- Mohamed, H.M.; Benmokrane, B. Reinforced Concrete Beams with and without FRP Web Reinforcement under Pure Torsion. J. Bridge Eng. 2016, 21, 04015070. [Google Scholar] [CrossRef]
- Mohammed, T.J.; Bakar, B.H.A.; Bunnori, N.M. Strengthening of reinforced concrete beams subjected to torsion with UHPFC composites. Struct. Eng. Mech. 2015, 56, 123–136. [Google Scholar] [CrossRef]
- Hejal, R.; Chopra, A.K. Earthquake Response of Torsionally Coupled, Frame Buildings. J. Struct. Eng. 1989, 115, 834–851. [Google Scholar] [CrossRef]
- Hejal, R.; Chopra, A.K. Lateral-Torsional Coupling in Earthquake Response of Frame Buildings. J. Struct. Eng. 1989, 115, 852–867. [Google Scholar] [CrossRef]
- Hsu, H.; Wang, C. Flexural-orsional behaviour of steel reinforced concrete members subjected to repeated loading. Earthq. Eng. Struct. Dyn. 2000, 29, 667–682. [Google Scholar] [CrossRef]
- Siah, W.L.; Stehle, J.S.; Mendis, P.; Goldsworthy, H. Interior wide beam connections subjected to lateral earthquake loading. Eng. Struct. 2003, 25, 281–291. [Google Scholar] [CrossRef]
- De-La-Colina, J.; Almeida, C. Probabilistic Study on Accidental Torsion of Low-Rise Buildings. Earthq. Spectra 2004, 20, 25–41. [Google Scholar] [CrossRef]
- Hsu, H.L.; Liang, L.L. Performance of hollow composite members subjected to cyclic eccentric loading. Earthq. Eng. Struct. Dyn. 2010, 32, 443–461. [Google Scholar] [CrossRef]
- Balkaya, C.; Kalkan, E. Estimation of fundamental periods of shear-wall dominant building structures. Earthq. Eng. Struct. Dyn. 2003, 32, 985–998. [Google Scholar] [CrossRef]
- Basu, D.; Jain, S.K. Alternative method to locate centre of rigidity in asymmetric buildings. Earthq. Eng. Struct. Dyn. 2006, 36, 965–973. [Google Scholar] [CrossRef]
- Lu, X.; Li, X. Some Problems on Seismic Design of Out-of-Codes High rise Buildings. J. Build. Struct. 2002, 23, 13–18. [Google Scholar]
- Xu, P.; Huang, J.; Wei, C. Response of Torsional Vibration of Tall Building Structures Induced by Seismic Action. Build. Sci. 2000, 16, 1–6. [Google Scholar]
- He, H.; Zhang, Y.; Li, H.-N. Response of Torsional Vibration of Tall Building Structures to Double Horizontal Seismic Action. J. Shenyang Jianzhu Univ. Nat. Sci. 2002, 18, 241–243. [Google Scholar]
- Dong-hui, P.; Jian, C. Responses of Torsional Vibration of Building Structures Induced by Horizontal Seismic Action from Different Directions. Earthq. Resist. Eng. Retrofit. 2004, 26, 9–14. [Google Scholar]
- Li, C.; Qu, W. Optimum properties of multiple tuned mass dampers for reduction of translational and torsional response of structures subject to ground acceleration. Eng. Struct. 2006, 28, 472–494. [Google Scholar] [CrossRef]
- Li, C.; Li, J.; Qu, Y. An optimum design methodology of active tuned mass damper for asymmetric structures. Mech. Syst. Signal Process. 2010, 24, 746–765. [Google Scholar] [CrossRef]
- Campbell, S.; Kwok, K.; Hitchcock, P.A. Dynamic characteristics and wind-induced response of two high-rise residential buildings during typhoons. J. Wind Eng. Ind. Aerodyn. 2005, 93, 461–482. [Google Scholar] [CrossRef]
- Li, Q.S.; Li, X.; He, Y.; Yi, J. Observation of wind fields over different terrains and wind effects on a super-tall building during a severe typhoon and verification of wind tunnel predictions. J. Wind Eng. Ind. Aerodyn. 2017, 162, 73–84. [Google Scholar] [CrossRef]
- Li, Q.S.; Zhi, L.H.; Yi, J.; To, A.; Xie, J. Monitoring of typhoon effects on a super-tall building in Hong Kong. Struct. Control Health Monit. 2014, 21, 926–949. [Google Scholar] [CrossRef]
- Li, Q.S.; Xiao, Y.Q.; Wong, C.K.; Jeary, A.P. Field measurements of typhoon effects on a super tall building. Eng. Struct. 2004, 26, 233–244. [Google Scholar] [CrossRef]
- Feng, R.Q.; Ye, J.; Yan, G.; Qing-Xiang, L.; Bin, Y. Wind-induced torsion vibration of the super high-rise building of Shenzhen Energy Center. Struct. Des. Tall Spec. Build. 2013, 22, 802–815. [Google Scholar]
- Liang, S.G.; Li, Q.S.; Liu, S.; Zhang, L.; Gu, M. Torsional Dynamic Wind Load on rectangular tall Buildings. Eng. Struct. 2004, 26, 129–137. [Google Scholar] [CrossRef]
- Hui, Y.; Tamura, Y.; Yang, Q. Analysis of interference effects on torsional moment between two high-rise buildings based on pressure and flow field measurement. J. Wind Eng. Ind. Aerodyn. 2017, 164, 54–68. [Google Scholar] [CrossRef]
- Yu, X.F.; Xie, Z.N.; Wang, X.; Cai, B. Interference effects between two high-rise buildings on wind-induced torsion. J. Wind Eng. Ind. Aerodyn. 2016, 159, 123–133. [Google Scholar] [CrossRef]
- Yang, X.; Gao, F.; Chi, Q.; She, T.; Yang, L.; Wang, N. Study of strong earthquake rotational accelerometer based on a spoke-type mass-string system. J. Nat. Disasters 2015, 24, 37–45. [Google Scholar]
- International Conference of Building Officials. ICBO UBC V2: Uniform Building Code-Volume 2: Structural Engineering Design Provisions; ICBO: Whittier, CA, USA, 1997. [Google Scholar]
- European Committee for Standardization. EN1998-1: Euro Code 8: Design of Structures for Earthquake Resistance-Part 1: General Rules, Seismic Actions and Rules for Buildings; CEN: Brussels, Belgium, 2013. [Google Scholar]
- The Building Center of Japan. BSLJ: The Building Standard Law in Japan; The Building Center of Japan: Tokyo, Japan, 2015. [Google Scholar]
- GB50009-2012. Load Code for the Design of Building Structures; China Architecture & Building Press: Beijing, China, 2012. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode Number | Relevant Floor | X Axis | Y Axis | ||||
|---|---|---|---|---|---|---|---|
| Natural Frequency by CSD (Hz) | PS | CF | Natural Frequency by CSD (Hz) | PS | CF | ||
| First-order mode | 32/6 | 0.66 | 180° | 1.00 | 0.56 | 180° | 1.00 |
| 32/12 | 0.66 | 180° | 1.00 | 0.56 | 180° | 1.00 | |
| 32/18 | 0.66 | 180° | 1.00 | 0.56 | 180° | 1.00 | |
| 32/24 | 0.66 | 180° | 0.90 | 0.56 | 180° | 0.99 | |
| 32/30 | 0.66 | 180° | 0.70 | 0.56 | 180° | 0.75 | |
| Second-order mode | 32/6 | 2.30 | 0° | 1.00 | 2.15 | 0° | 1.00 |
| 32/12 | 2.30 | 0° | 1.00 | 2.15 | 0° | 1.00 | |
| 32/18 | 2.30 | 0° | 1.00 | 2.15 | 0° | 1.00 | |
| 32/24 | 2.30 | 20° | 0.70 | 2.15 | 10° | 0.75 | |
| 32/30 | 2.30 | 180° | 0.55 | 2.15 | 180° | 0.75 | |
| Third-order mode | 32/6 | 4.20 | 180° | 0.60 | 4.30 | 150° | 0.05 |
| 32/12 | 4.20 | 170° | 0.20 | 4.30 | 180° | 0.03 | |
| 32/18 | 4.20 | 5° | 0.90 | 4.30 | 0° | 0.6 | |
| 32/24 | 4.20 | 0° | 0.95 | 4.30 | 0° | 0.75 | |
| 32/30 | 4.20 | 180° | 0.25 | 4.30 | 180° | 0.05 | |
| Mode Number | Relevant Floor | Torsional Direction | ||
|---|---|---|---|---|
| Natural Frequency by CSD (Hz) | PS | CF | ||
| First-order mode | 32/8 | 0.56 | 0° | 1.0 |
| 32/12 | 0.56 | 0° | 1.0 | |
| 32/16 | 0.56 | 0° | 1.0 | |
| 32/20 | 0.56 | 0° | 1.0 | |
| 32/24 | 0.56 | 0° | 1.0 | |
| 32/28 | 0.56 | 0° | 1.0 | |
| Second-order mode | 32/8 | 2.15 | 20° | 0.37 |
| 32/12 | 2.15 | 180° | 0.70 | |
| 32/16 | 2.15 | 180° | 0.42 | |
| 32/20 | 2.15 | 170° | 0.40 | |
| 32/24 | 2.15 | 0° | 0.97 | |
| 32/28 | 2.15 | 0° | 0.97 | |
| Third-order mode | 32/8 | 4.30 | 0° | 0.7 |
| 32/12 | 4.35 | 0° | 0.8 | |
| 32/16 | 4.35 | 5° | 0.65 | |
| 32/20 | 4.35 | 180° | 0.1 | |
| 32/24 | 4.35 | 100° | 0.04 | |
| 32/28 | 4.35 | 25° | 0.4 | |
| Modal Number | Mode | Natural Frequency/Hz | |||
|---|---|---|---|---|---|
| Measured | Finite Element Simulation | Measured | Finite Element Simulation | Relative Deviation (%) | |
| 1 | The first-order translational mode along the Y axis | The first-order translational mode along the Y axis | 0.56 | 0.56 | 0.00 |
| 2 | The first-order torsional mode | The first-order torsional mode | 0.56 | 0.60 | 6.67 |
| 3 | The first-order translational mode along the X axis | The first-order translational mode along the X axis | 0.66 | 0.66 | 0.00 |
| 4 | The second-order translational mode along the Y axis | The second-order translational mode along the Y axis | 2.15 | 2.07 | 3.86 |
| 5 | The second-order torsional mode | The second-order torsional mode | 2.15 | 2.10 | 2.38 |
| 6 | The second-order translational mode along the X axis | The second-order translational mode along the X axis | 2.30 | 2.24 | 2.68 |
| 7 | The third-order translational mode along the X axis | The third-order translational mode along the X axis | 4.20 | 4.48 | 6.25 |
| 8 | The third-order translational mode along the Y axis | The third-order translational mode along the Y axis | 4.30 | 4.53 | 5.08 |
| 9 | The third-order torsional mode | The third-order torsional mode | 4.35 | 4.63 | 6.05 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, J.; Li, Z.; Zhao, Z. Estimation Formula of Modal Frequency of High-Rise Buildings under Different Wind Speeds during Typhoons. Appl. Sci. 2022, 12, 47. https://doi.org/10.3390/app12010047
Hu J, Li Z, Zhao Z. Estimation Formula of Modal Frequency of High-Rise Buildings under Different Wind Speeds during Typhoons. Applied Sciences. 2022; 12(1):47. https://doi.org/10.3390/app12010047
Chicago/Turabian StyleHu, Jiaxing, Zhengnong Li, and Zhefei Zhao. 2022. "Estimation Formula of Modal Frequency of High-Rise Buildings under Different Wind Speeds during Typhoons" Applied Sciences 12, no. 1: 47. https://doi.org/10.3390/app12010047