1. Introduction
With the development of hardware equipment and communication technology, the collaborative control problem has recently become the focus of studies of complex systems [
1,
2,
3]. The consensus of multi-agent systems (MASs) plays an important role in the field of collective behaviors, owing to its excellent model assumptions and extensive application scenarios such as control of the formation of unmanned aerial vehicles [
4], restoration of a power system [
5], intelligent and sustainable supplier selection of supply chains [
6], etc.
In real-world application scenarios, communication among agents may be affected by the environment or various attacks, especially human-made malicious attacks, which is likely to cause the system to become unstable. For attack scenarios, generally speaking, they may be classified into two main categories: denial-of-service (DoS) attacks [
7,
8,
9,
10] and deception attacks [
11,
12,
13] (for more details, refer to [
14]). DoS attacks are attacks that make the data of sensors and controllers unavailable, resulting in packet time delays or packet drops in the signal transmission. In contrast, deception attacks are attacks that have the ability to obtain and tamper with the transmitting data and the commands from controllers. DoS attacks can destroy communication topologies and can damage the stability of the systems. Compared with DoS attacks, deception attacks are more moderate and difficult to detect, which quietly makes the system unstable. Thus, deception attacks have attracted a lot of interest and has become one of our main concerns. Much research on deception attacks has been conducted in recent years [
15,
16,
17,
18,
19]. For instant, consider the existence of false data injection attacks; the authors in [
16] investigated the security issue in the state estimation problem of a networked control system. Similarly, in the presence of deception attacks, the authors [
19] studied secure synchronization of MASs by means of impulsive control. However, in the above research, the results were based on a linear or an additive assumption and assumptions on the attack model were made, resulting in narrow scopes of applications.
Taking this restriction into account, models with more simulation significance and practical application value were established by means of stochastic processes, especially the Bernoulli distribution [
20,
21,
22,
23,
24], in which the gains of attacks were assumed to be a stochastic Bernoulli variable. For example, the authors in [
21] investigated the consensus of linear MASs under deception attacks with stochastic Bernoulli variables. It is worth noting that the attacks mentioned above were described as discrete events. When the state of the system suffers instantaneous disturbances and experiences sudden changes at certain moments, the system may be attacked. This is a so-called impulsive attack. An impulsive attack is a form of attack that causes instantaneous changes to the state of the system. Models of impulsive attacks with stochastic gains seem to be sufficiently good at neglecting positions. However, in actuality, such a problem is also vital to the stability of systems as we do not know a priori when attacks are made. Suppose that both the gains and instants of the impulsive attacks are stochastic. The author in [
25] first considered these two characteristics of an attack, and then, some sufficient conditions for almost stable general Lipschitz-type nonlinear systems were derived. However, the work in [
25] still used restricted gains under the Bernoulli distribution and the influence of attacks was assumed to monotonically decrease, which become restrictive assumptions.
On the other hand, focused on the variability in an environment, a model relying on a Markovian chain is appropriate in general. Taking this into account, the consensus with Markovian switching topologies has become a hot issue regarding the performance of multi-agent systems with external disturbances. However, most existing methods such as the works in [
26,
27] for a consensus with attacks only considered cases where topologies or systems contained Markovian properties rather than attacks. Though some authors did assess attacks in a Markovian form such as the works in [
9,
28], most of these works were concerned with DoS attacks; the type of variable chosen, such as gains; or assumptions about the effects of a combination of attacks instead of deception attacks. As a result, the works above do not fully consider the characteristics of the attack, and thus, a general work on both gains and instants of deception attacks still has not yet been conducted.
With the discussion above, this paper aims to establish a more universal model for deception attacks and provides some sufficient conditions for the consensus of multi-agent systems. The contributions of this paper can be summed up as follows:
Taking destabilizing impulse into account, and based on the Markovian properties, a general model for impulsive deception attacks is established, where the gains do not obey any specific distribution and instants are assumed to obey the Markovian chain.
In addition, some special cases including both the characteristics of attacks and Markovian properties are considered.
The remainder of this paper is organized as follows. The main results about the consensus for system (
1) are derived in
Section 3 based on the novel model for the impulsive deception attacks introduced in
Section 2, and a corresponding numerical example is provided in
Section 4. The conclusion and some interesting topics of future work are given in
Section 5.
Notation 1. Let be a set of real numbers and be a set of positive integers. Let be the n-dimensional Euclidean space; furthermore, is the n-dimensional identity matrix and is the n-dimensional column vector with one element. Let M be a matrix or vector, for which the transposition is represented by , and its deduced norm or norm is represented by . Let and denote the largest and nonzero smallest eigenvalue of the matrix A, respectively. A matrix B is said to be a symmetric positive definite matrix if and for any nonzero vector x. For any function , we define . In addition, let be a complete probability space with respect to the filtration , which satisfies the common conditions, i.e., right continuous and contains all -null sets. Let () denote the (conditional) expectation of a stochastic process.
2. Preliminaries
Before presenting the system models and the problem statement, we first give some necessary knowledge about graph theory, which is used to describe the communication topology among MASs. In this paper, we consider the MASs with N agents and the topology can be represented by a digraph , where is the set of vertices, is the set of edges, and is called the adjacency matrix. When the jth agent sends information to the ith agent, there exists an edge between them and ; otherwise, . Let the diagonal matrix be the in-degree matrix and . Then, the Laplacian matrix can be defined as , where and .
Let us consider that generally nonlinear multi-agent systems (NMASs) consist of
N agents and that each can be described as follows:
where
and
are the system state and external input control, respectively. Function
denotes the nonlinear items satisfying the well-known Lipschitz condition.
, and
C are constant matrices with approximate dimensions.
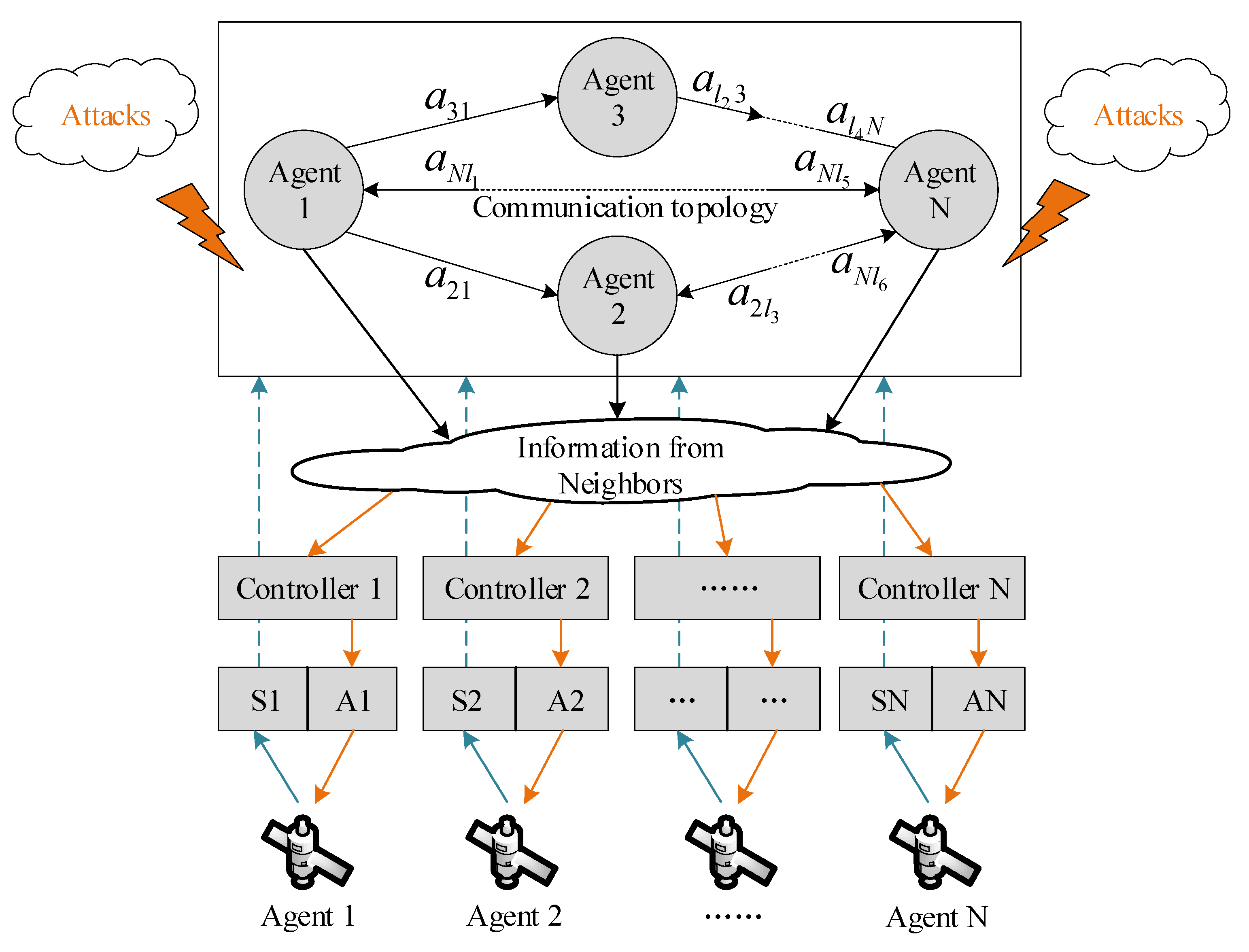
Before presenting the controller considered in this paper, we first provide some explanations about the impulsive deception attacks, so that readers can understand the design of the controller more clearly. The configuration of NMASs under impulsive deception attacks is shown in
Figure 1. Generally, controllers generate control signals according to states measured by sensors and then send them to the actuators. For MASs, data transmissions are heavily dependent on topologies and wireless transmission technology. If attackers launch data modification or false data attacks to topologies in discrete-time manners or calls impulsive attacks, they result in instantaneous jumps in the transmitted signal.
Under the configuration reflected in
Figure 1, in this paper, we consider the following common linear feedback controller under Markovian impulsive attacks:
where
is the feedback gain for designed controller. Let
denote the impulsive sequence in Dirac form, i.e., the function
, and
denotes the impulsive gains. In addition, we assume that
is right-hand continuous at
, meaning that
. Since the destabilizing impulse is adopted to model the impulsive attacks here, one can obtain the fact that
or
. Note that
here denotes impulsive attacks.
Remark 1. Let and denote the total impulsive intervals and the occurrence number for the ith modes of impulses over the interval , respectively. Hence, we have , which denotes the total number of impulses over the interval .
Considering that the stabilization problem of an error system with ideal dynamics is a common method to tackle the consensus of multi-agent systems. Define the error state as , which also can be written as , and the vector of states . Then, we can rewrite system (1) with controller (2) in the error system in a compact form as follows:where . Define and function , where the vector function . Moreover, , and then, one has according to the values of . Before ending this section, here, we present some assumptions and definitions used in this paper.
Assumption 1. Suppose that there exists p types of impulses, and both the gains and instants of impulsive sequence are stochastic. The gains take values from a finite set satisfying and , and . The impulsive sequence is governed by a right-continuous homogeneous Markovian chain with p modes, i.e., for with the generator given bywhere and denotes the transition rate from i to j, which satisfies that for and . According to properties of the Markovian chain, we know that the impulsive interval satisfies the exponential distribution, i.e., , when and . Moreover, we obtain the transition probability that for and for .
Based on Assumption 1, we further assume that is a stochastic process on , where is the filtration of . On the other hand, the impulsive instants satisfies the Markovian chain, meaning that are independent random variables on a probability space ; similarly, is the filtration of . Hence, denote , and . As a result, the jointly stochastic process can be defined on the probability space .
Assumption 2. The nonlinear function is said to be satisfied the Lipschitz condition if there exists a constant such that Definition 1. System (1) is said to be mean square consensus under Markovian impulsive attacks for any given initial value of system states if 4. Numerical Examples
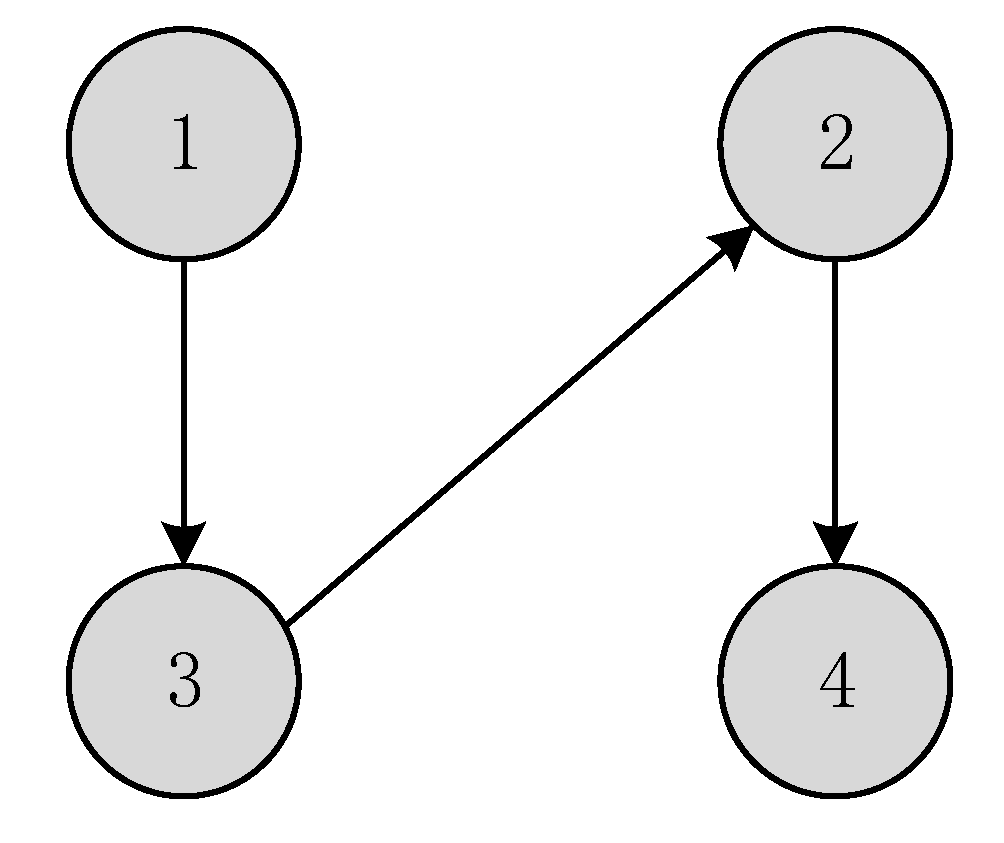
In this section, a numerical example with four different cases corresponding to the results established in the previous section is presented, and the last one is given to illustrate the case when gains of attacks
. Consider the NMASs with four agents, for which the communication topology is described as
Figure 2. The dynamics of each agent can be described as follows:
where the system states
.
is shown in (
2), and the nonlinear function
. The constant matrices
, and
C are given as follows:
which implies
and
with
.
Choose
; then
and
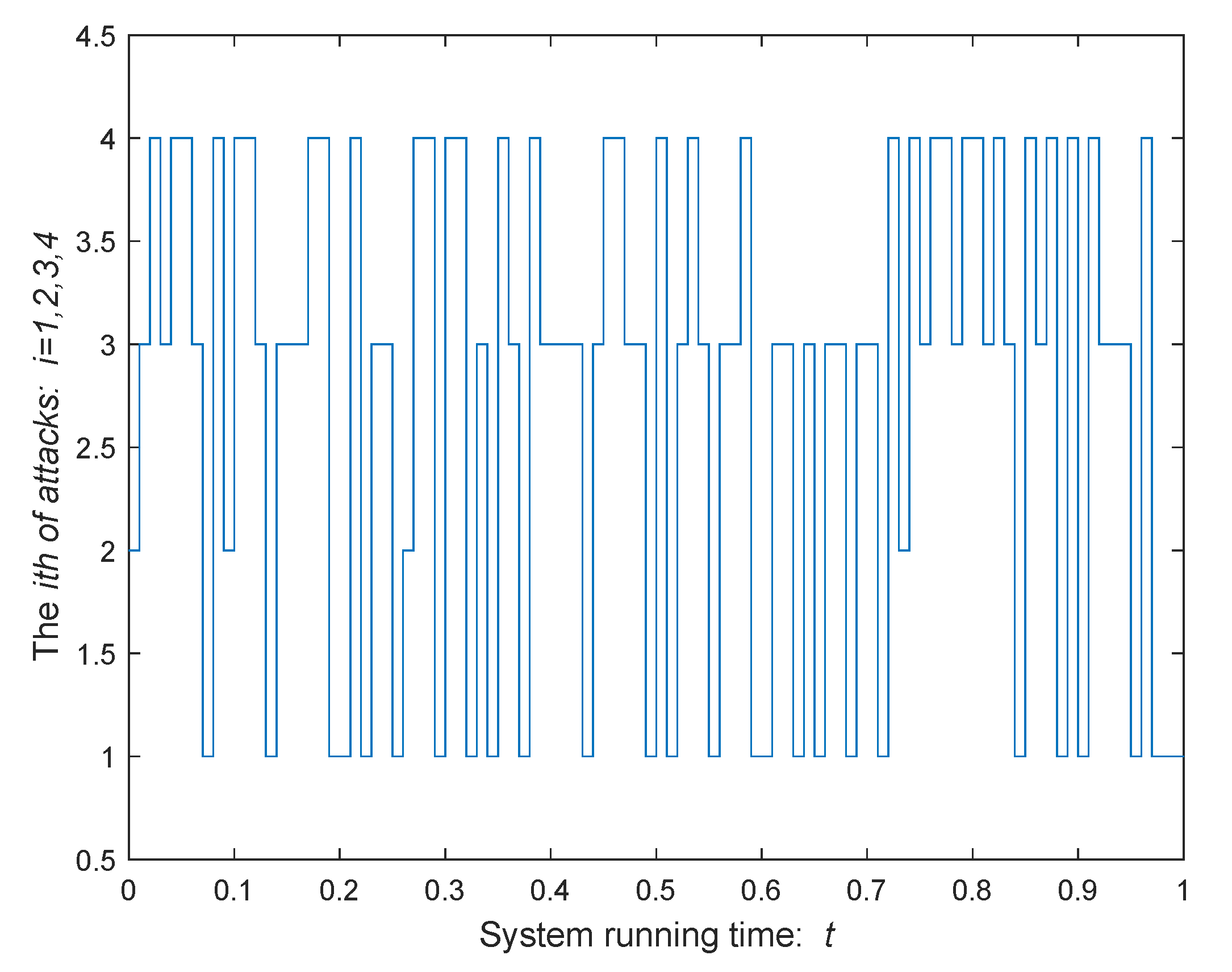
. Suppose a generator of the considered Markovian chain is given as the matrix
from which we know that
, from which the transition probability matrix
Q can also be derived as
and for which the Markovian chain is described in
Figure 3, where we only present a local part of the whole Markovian chain.
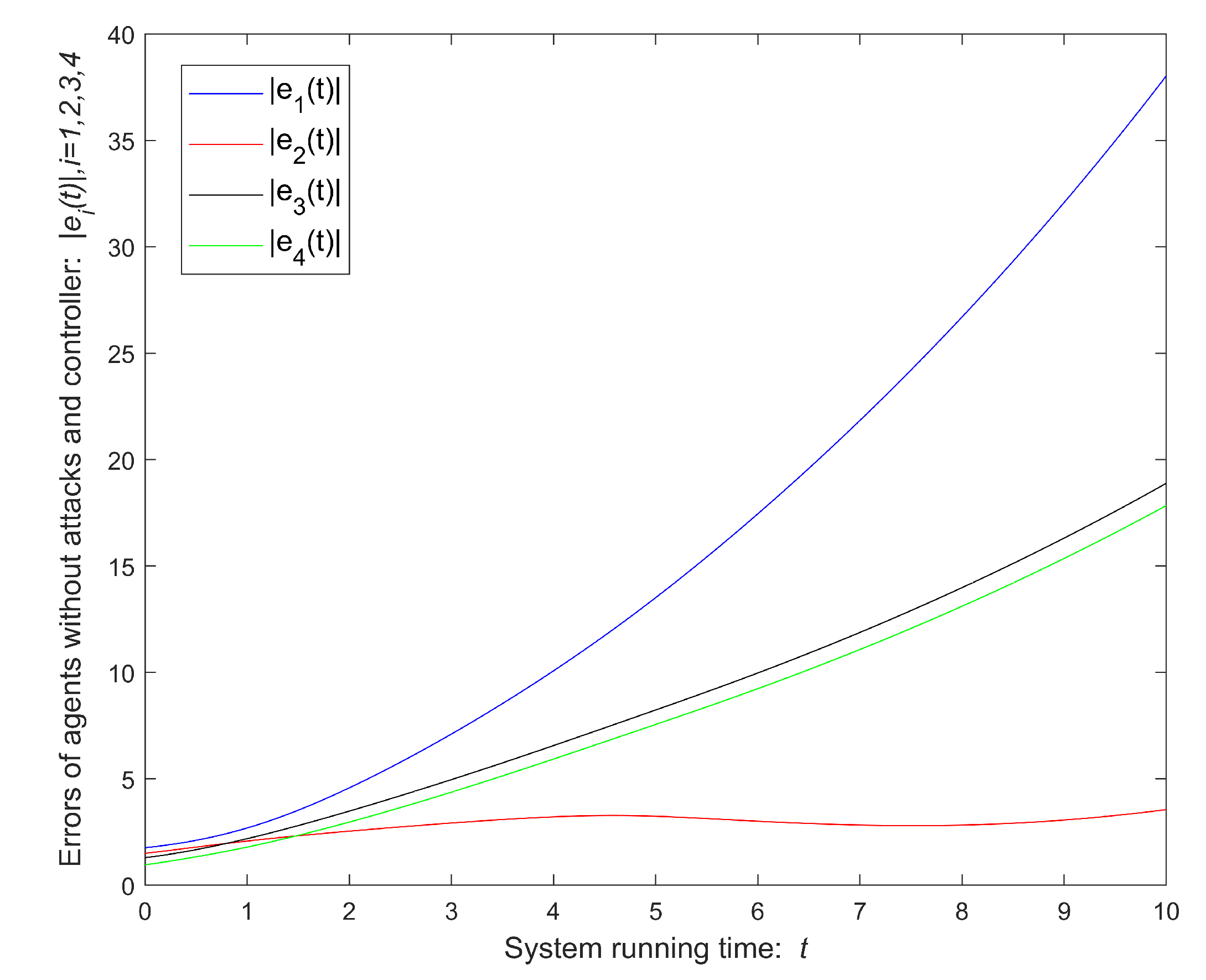
In addition, set the initial values of system state
which can also be randomly generated. Moreover, we can verify that the average values of
is
. Let the error state defined as
. As shown in
Figure 4, the error trajectories of agents do not reach an agreement in the absence of a controller, in other words, system (
22) is unstable without control.
In the following, we consider four cases of stochastic attacks, in which the first three examples are given to illustrate some results proposed in the previous section and the last example is given to illustrate the case in which gains of attacks are below the defined threshold, i.e., . Let the time step of all the simulations in this section be .
Remark 6. As we know, the Markovian process can reflect the random jump phenomenon in the real world well and is widely used in many production activities. The cases given here are used to simulate different kinds of malicious human-made network attacks in reality as well as possible attack phenomena in engineering applications such as some transformers that suffer from cyber attacks and result in functional failure in the power grid.
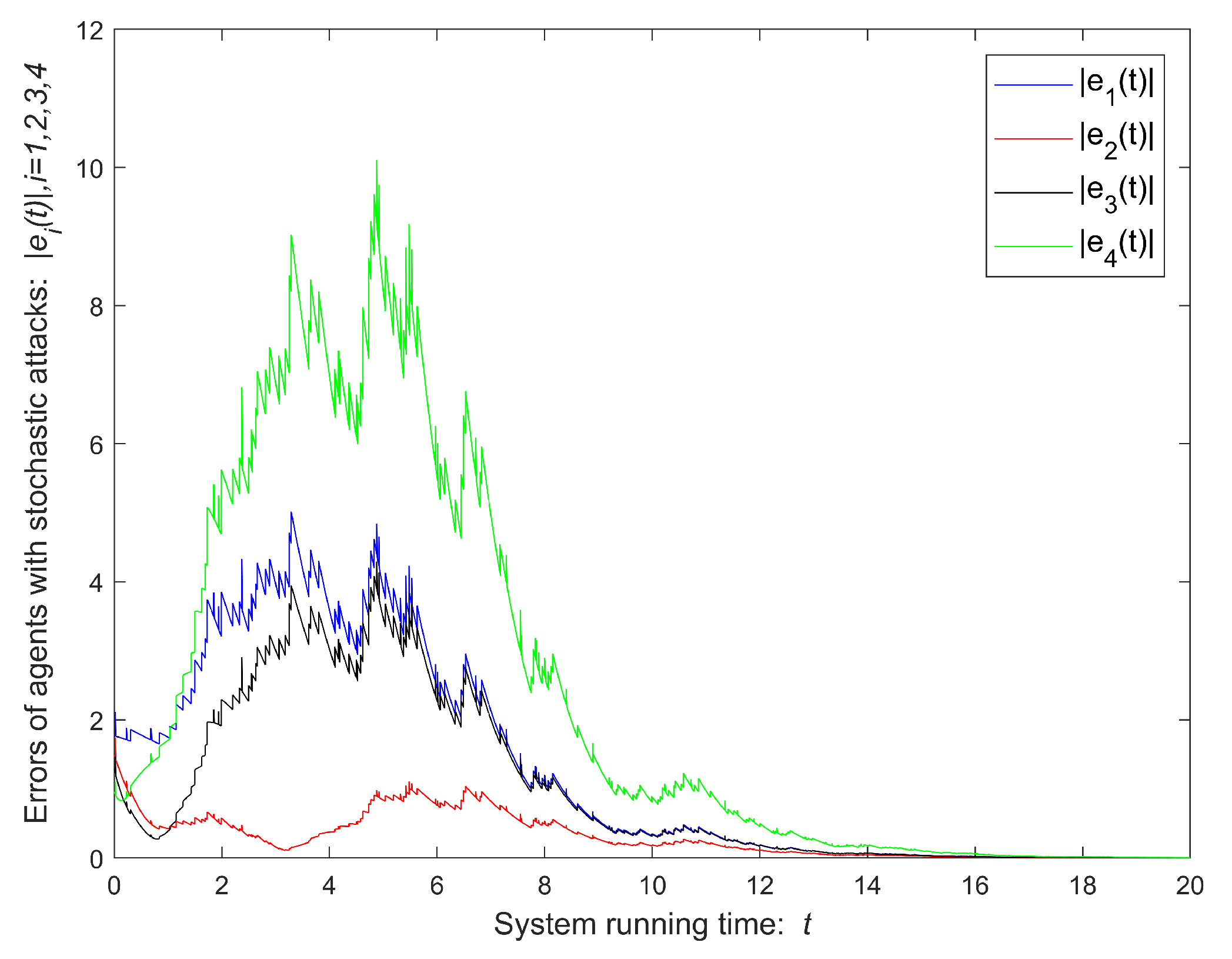
Case 1: Stochastic gains and instants.
In this case, based on the condition that , we assume that gains of the impulsive deception attacks , and , where satisfy the Bernoulli distribution with expectations and , respectively. Then, we can verify that , and . In addition, instants of attacks obey the Markovian chain, for which the generator is presented as above.
Based on the given conditions, one can get that
. Thus, by employing Theorem 1, the consensus of system (
22) can be achieved as
Figure 5 shown. Compared with
Figure 4, we know that the error states of system (
22) can converge to zero from
Figure 5 with controller (
2), and according to Definition 1, the consensus of system (
22) can be achieved.
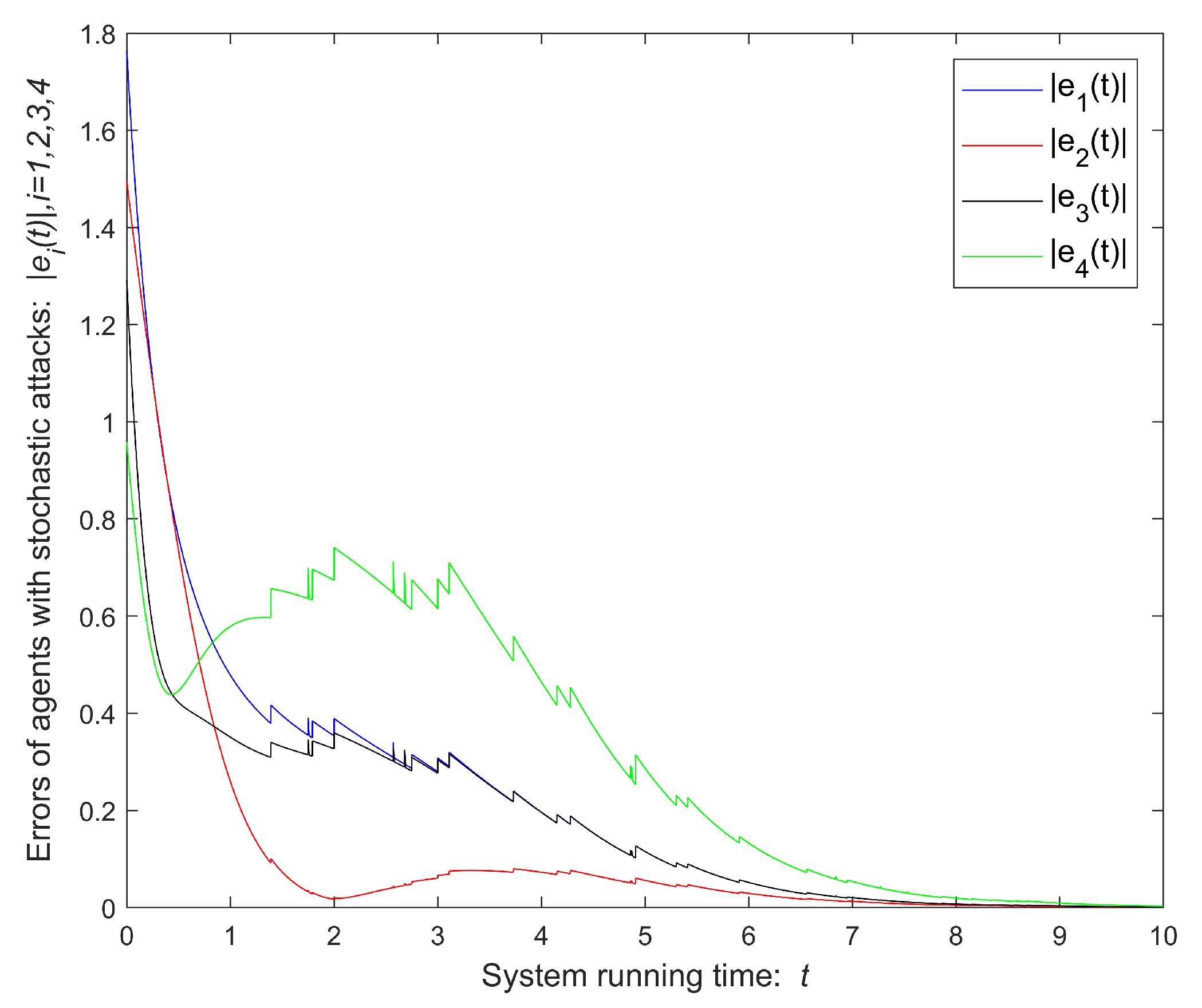
Case 2: The Markovian chain is a stationary distribution.
From the given generator, the stationary distribution
can be obtained. In addition, we assume that gains of the impulsive deception attacks take values from the following random valuables such that
, and
, where
and
are the discrete variables obeying the following distribution:
| 0.7 | −0.7 | 0.8 | | 0.6 | −0.6 | 0.8 |
| 0.5 | 0.4 | 0.1 | | 0.6 | 0.2 | 0.2 |
In contrast,
and
satisfy the Bernoulli distribution with expectations
and
, respectively. Thus, we know that
, and
; therefore the condition in Theorem 2 can be checked such that
with
and
. As a result, the consensus of system (
22) can be achieved by employing Theorem 2, as shown in
Figure 6. Similarly, we know that the error states of system (
22) can converge to zero from
Figure 5 with the controller (
2), and and according to Definition 1, the consensus of system (
22) can be achieved.
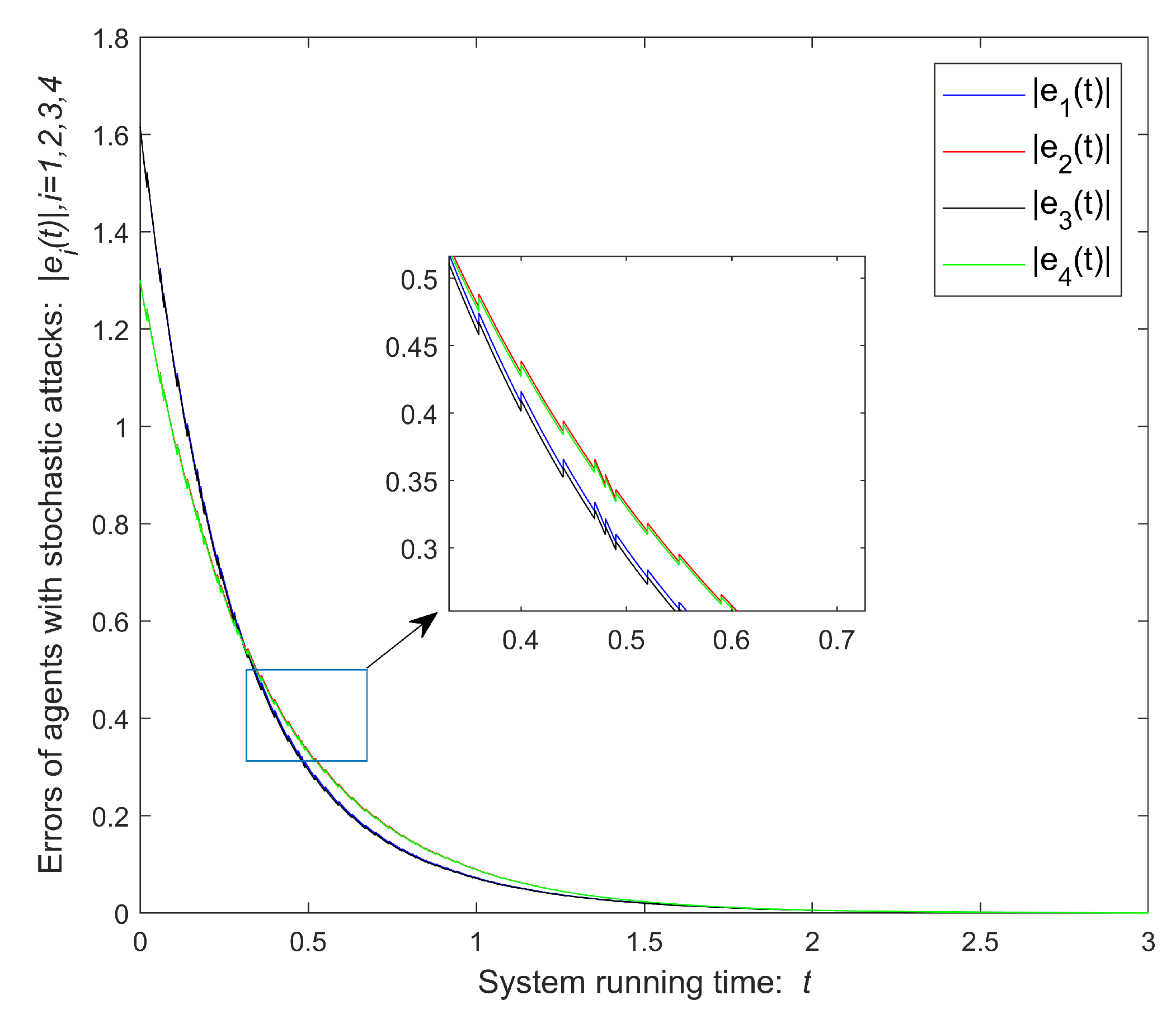
Case 3: Determined gains and stochastic instants.
In this case, we further assume that gains of the impulsive deception attacks is a constant
and that instants are assumed to be the same as that in Case 1. Note that the gains in this case are always bigger than one, and according to Remark 4, we know that system (
22) must be stable without impulsive deception attacks. Thinking about the conditions (
16), we reselect the system matrices
A as
With the parameters given or calculated above, one can obtain that
and
. Therefore, the consensus of system (
22) can be achieved by employing Corollary 2, and the result is shown as
Figure 7. Note that, in this case, the parameter
needs to be less than zero, the reason can be found in Remark 4. Similarly, from
Figure 7 and Definition 1, we can obtain the consensus as error states converge to zero.
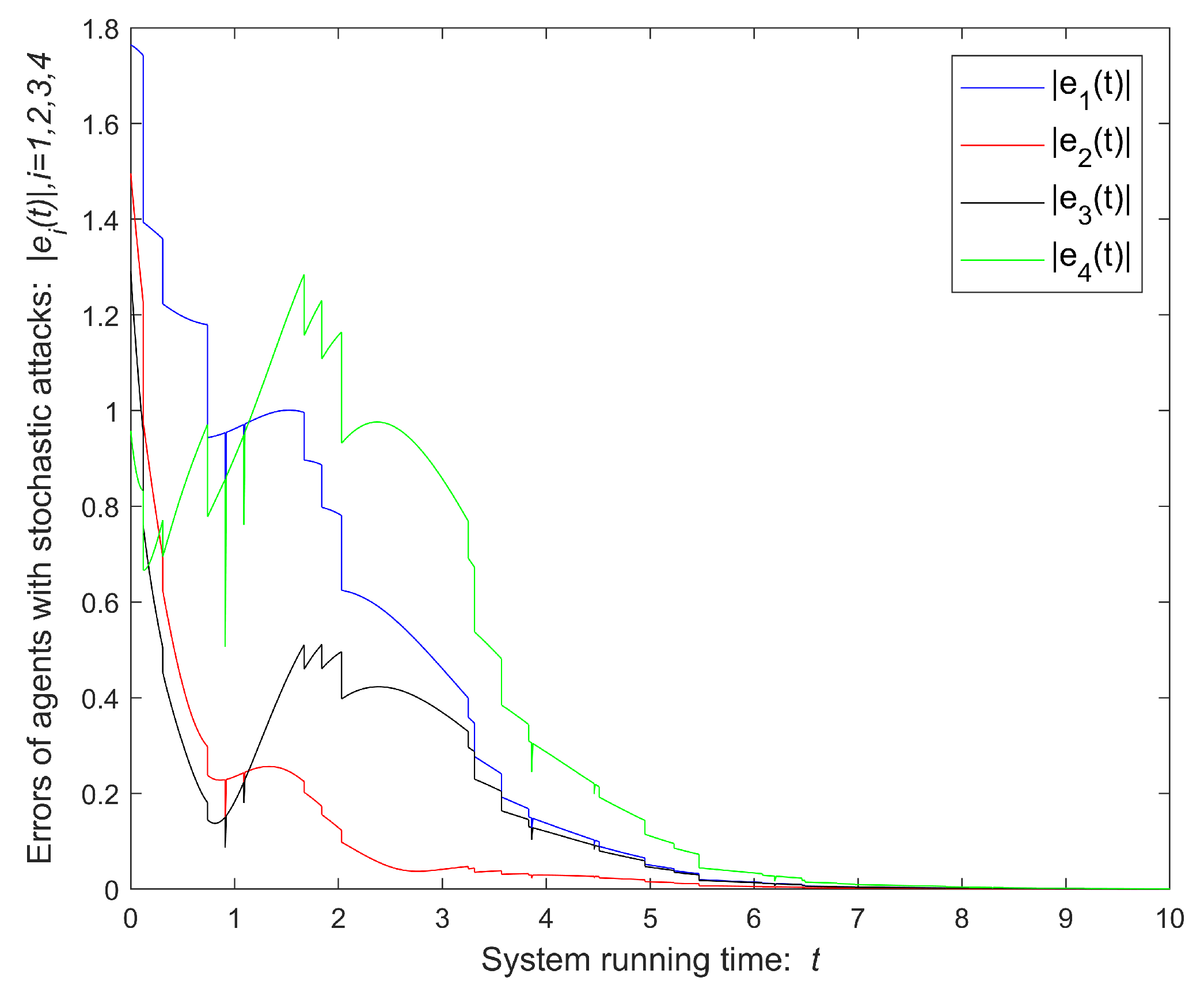
Case 4: Stochasticgains and instants with.
In this case, we further assume that and that gains of the impulsive deception attacks take values from , and , where satisfy the Bernoulli distribution with expectations and , resceptively.
Then, we can verify that
, and
. In addition, instants of attacks obey the Markovian chain for which the generator is presented as above. Hence, based on the given conditions, one can get that
. Thus, by employing Theorem 1, the consensus of system (
22) can be achieved as shown in
Figure 8.
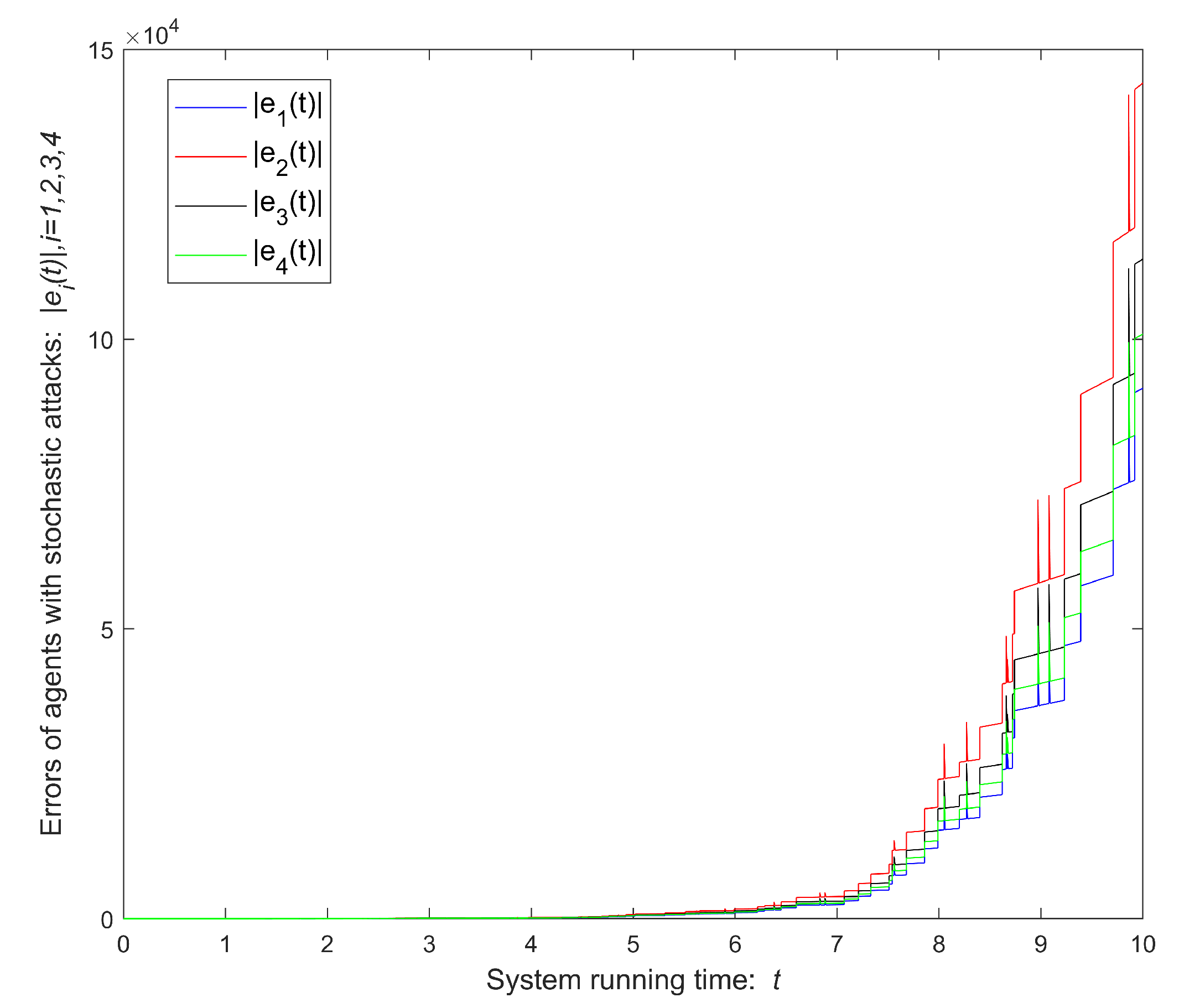
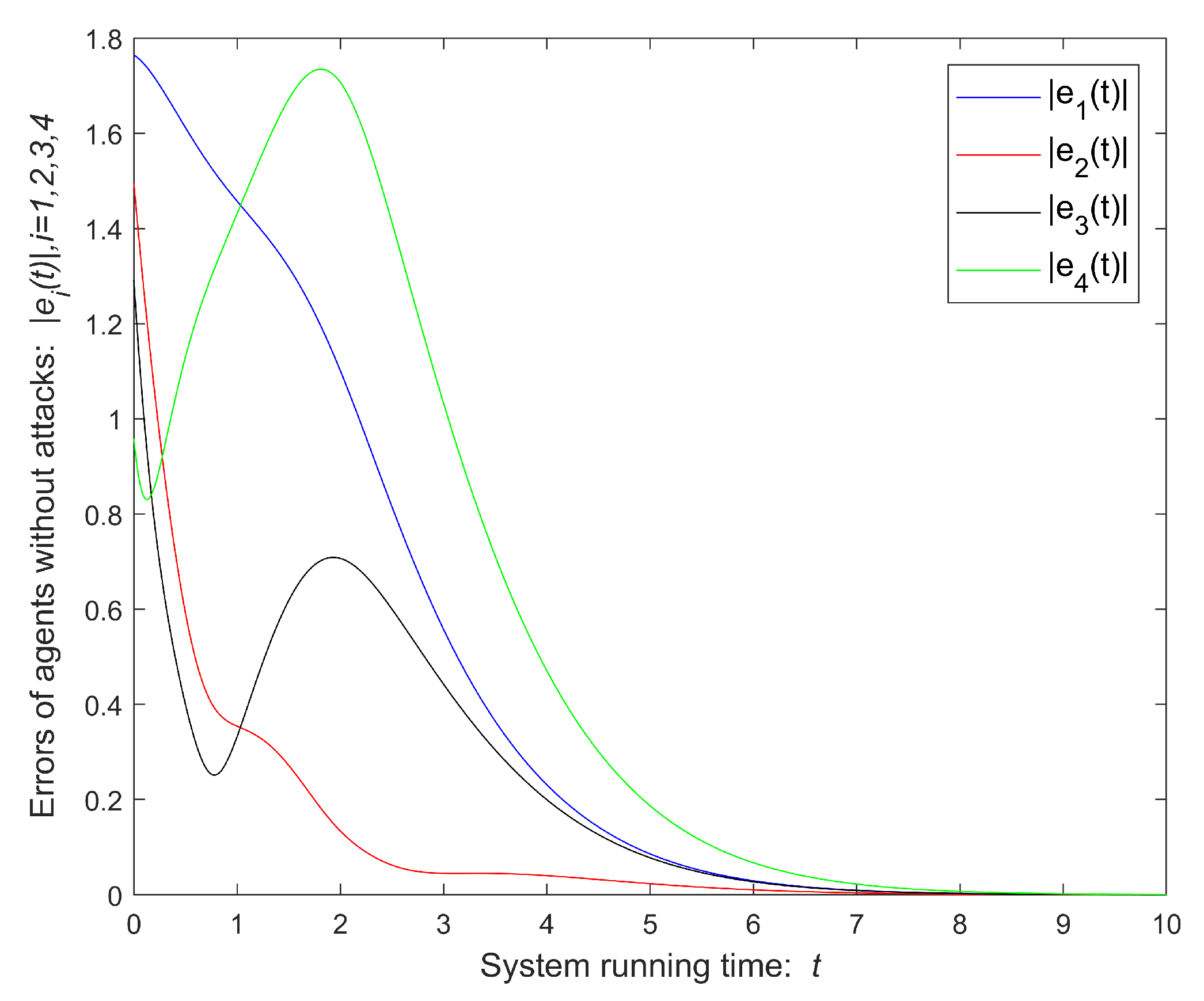
Remark 7. From Case 4, we can find that impulsive attacks can stabilize an unstable system when gains belong to . In fact, we can find its theoretical support from the error system (3). When , one can get that . The impulses can stabilize an unstable system, as we know, when the gains of impulses are less than one. Thus, the error system (3) can be stabilized with impulsive control. Remark 8. In order to further compare the simulation results with the controller, we give the following simulations with attacks but without control and a system with control but without an attack. For a system (3) affected by the attack and no controller added, the error trajectories of the agents are depicted in Figure 9. From Figure 9, we can find that the error states of system (3) become bigger and bigger, meaning that consensus cannot be reached under attacks without the controller. In addition, for the system that is not attacked, the error trajectories of agents with control are depicted in Figure 10, from which we know that system (22) can achieve consensus under the common controller and without the influence of attacks . 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









